Изобретение относится к электротехнике, в частности к преобразовательной технике, и может быть использовано в стабилизированных источниках электропитания повышенной точности.
Целью изобретения является улучшение динамических характеристик и повышение точности стабилизации.
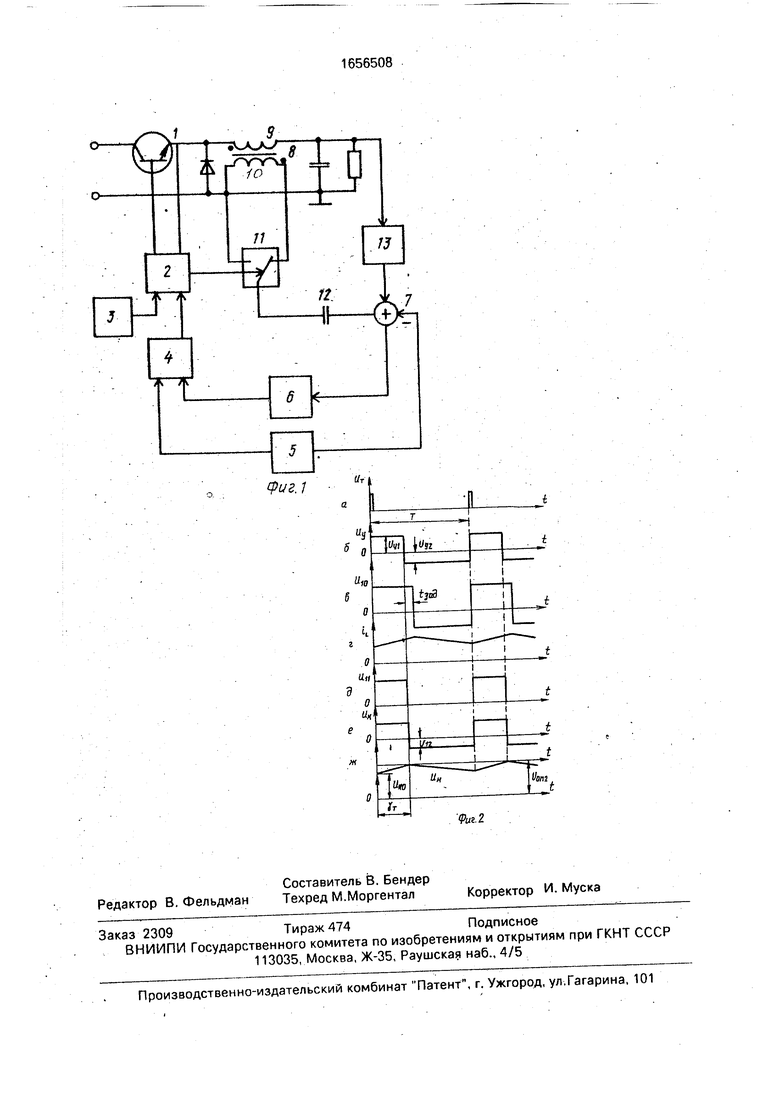
На фиг. 1 приведена структурная схема устройства, реализующего способ управления импульсным стабилизатором постоянного напряжения; на фиг. 2 - временные диаграммы, поясняющие данный способ.
Устройство содержит регулирующий элемент(транзистор) 1. формирователь 2 управляющих импульсов и выключения регулирующего элемента, генератор 3 тактовых импульсов, компаратор 4, источник 5 опорных сигналов, интегратор 6, сумматор 7, дроссель 8 с основной обмоткой 9 и допол-1 нительной обмоткой 10, управляемый переключатель 11, разделительный конденсатор 12, узел 13 линейной коррекции.
Способ реализуется в импульсном стабилизаторе следующим образом. Регулирующий транзистор 1 включает в тактовые моменты времени сигналом с тактового генератора 3. С помощью обмотки 10 дросселя 8 выделяют корректирующий сигнал, который по форме повторяет импульсное напряжение на основной обмотке 9 дросселя импульсного стабилизатора. ОдновреО
ел о ел о
00
менно с включением регулирующего транзистора 1 в тактовые моменты времени подключают корректирующий сигнал к каналу обратной связи путем переключения управляемого переключателя 11 в положение, по- казанное на фиг. 1. Затем из корректирующего сигнала с помощью разделительного конденсатора 12 исключают постоянную составляющую. Полученный сигнал складывают на сумматоре 7 с сигналом рассогласования, т.е. разницей между напряжением нагрузки и опорным напряжением, снимаемым с источника 5 опорных сигналов. Суммарное напряжение интегрируют на интеграторе 6 и сравнивают с опорным сигналом от источника 5 опорных сигналов. Сравнение проводят но компараторе 4. В момент равенства проинтегрированного и опорного сигналов вырабатывают управляющий импульс выключения регулирующего транзистора 1 и одновременно от- ключают корректирующий сигнал до очередного тактового момента (переводят управляемый переключатель 11 в положение, противоположное показанному на фиг.
1).
Процессы, протекающие в устройстве при реализации предлагаемого способа, показаны на фиг. 2 и заключаются в следующем. В момент времени t 0 на выходе генератора 3 появляется тактовый импульс DT, который вызывает формирование на выходе формирователя 2 управляющего импульса включения регулирующего транзистора с амплитудой Uyi (см. фиг. 2,6) и переброс переключателя 11 в состояние, показанное на фиг. 1. Регулирующий элемент 1 включается, на основной обмотке 9 дросселя 8 появляется напряжение, равное разности входного UBx и выходного Увых напряжений стабилизатора, ток ii (фиг. 2,г) в этой обмотке нарастает примерно по линейному закону. На дополнительной обмотке 10 появляется напряжение Uio Кдр(иВх - ивых), где КДр Wio/Wg, Wg и Wio - число витков обмотки 9 и 10 (см. фиг. 2,в). Напряжение Un (см. фиг. 2,д) на выходе переключателя 11 поддерживается равным Uio. На сумматор 7 поступает корректирующий сигнал
UK U11-U12,(1)
где Ui2 напряжение на разделительном
конденсаторе (см. фиг.2е).
Кроме того, на сумматор 7 подается сигнал
рассогласования
Up V0ni -КдиВЫх,(2)
где Кд - коэффициент передачи узла 13 линейной коррекции, представляющего собой в простейшем случае просто делитель напряжения, Voni - опорное напряжение, подаваемое на сумматор 7 с источника 5.
Выходной сигнал сумматора 7 поступает на интегратор 6, в результате чего на выходе интегратора 6 появляется напряжение
ии иио+ Г0 (U - ир) dt,
(3)
где UHO - начальное значения напряжения
ии, Ти - постоянная времени интегратора (см. фиг. 2,ж).
На компараторе 4 происходит сравнение опорного сигнала V0n2 , поступающего от источника 5, с выходным сигналом интегратора 11и, имеющим пилообразную форму. В момент t уТ сравнения сигнэлов /оп2 и 11и компаратор вырабатывает импульс, поступающий на формирователь 2, под действием которого на выходе формирователя 2
формируется управляющий импульс выключения регулирующего элемента с амплитудой Uy2 (см. фиг. 2,6), управляемый переключатель 11 перебрасывается. Напряжение Un на выходе переключателя 11 становится равным нулю (см. фиг. 2,д).
Регулирующий элемент 1 выключается с задержкой г3ад после начала формирования управляющего импульса его выключения, что в случае использования биполярного
транзистора, в первую очередь, обусловлено временем рассасывания. После выключения регулирующего элемента ток IL в основной обмотке 9 дросселя 8 убывает приблизительно по линейному закону (см. фиг.
2,г). Напряжение Uio на дополнительной обмотке 10 меняет знак. Однако это не сказывается на напряжении Un на выходе переключателя 11, которое остается равным нулю до начала следующего периода. При
этом корректирующий сигнал поддерживается равным
UK -U12(4)
Напряжение 1)и на выходе интегратора 6
уменьшается.
В момент t Т подачи на формирователь
2 очередного тактового импульса от генератора 3 начинается следующий период работы схемы. Начинается формирование следующего управляющего импульса включения регулирующего элемента. Регулирующий элемент 1 включается (временем включения регулирующего элемента пренебрегаем, поскольку в случае применения биполярного транзистора оно обычно почти
на порядок меньше времени рассасывания). Управляемый переключатель 11 возвращается в исходное состояние, показанное на фиг. 1, появляется очередной импульс напряжения на выходе переключателя
ост
U -( U UK
Un -Uw- nT t (n + y)T. где n - любое целое число. Корректирующий сигнал, поступающий на сумматор 7 через разделительный конденсатор 12, снова определяется выражением (1). Напряжение Уи на выходе интегратора 6 снова начинает увеличиваться.
Таким образом, корректирующий сигнал UK, показанный на фиг. 2. определяется выражениями:
11ю- Ui2 при nT t (n + y)T, -Ui2npn(n+ y)T t (п-М)Т,
п 0, 1,2, ...
Емкость конденсатора 12 выбирается достаточно большой, поэтому напряжение Lh мало отличается от соеднего значения напряжения Un, „равного
(п4Г)Т
UUCP 4 / ДР ( - ивых ) dt .
пт
В рассматриваемом стабилизаторе можно выделить два контура регулирования. Первый контур включает в себя регулирующий элемент 1, дроссель 8, управляемый переключатель 11, разделительный конденсатор 12, сумматор 7, интегратор б, компаратор 4, формирователь 2, второй контур включает в себя регулирующий элемент 1, дроссель 8, конденсатор фильтра, узел 13 линейной коррекции, сумматор, интегратор 6, компаратор4, формирователь 2. В связи с тем, что в первый контур не входит конденсатор фильтра, а также второе звено фильтра (при двухзвен- ном фильтре), процессы в этом контуре протекают значительно быстрее, чем во втором контуре. Задержка выключения регулирующего элемента вызывает неустойчивость процессов именно в первом контуре. Исключение влияния этой задержки позволяет обеспечить устойчивость первого контура и всего стабилизатора в широком диапазоне изменения параметров.
Одновременно с хорошими динамическими свойствами в предлагаемом способе обеспечивается и высокая статическая точность стабилизации. Среднее значение корректирующего сигнала UK равно нулю, т.е.
1 т
Y/Ukdt 0,
о
из уравнения (3)получаем
. т1 т
Y / Up dt у / ( Um - Кд ивых) dt О
0
5
0
5
0
5
0
Отсюда следует, что
U6
dt
Uonl
т.е. среднее значение выходного напряжения не зависит от медленных изменений входного напряжения VBX и тока нагрузки. Таким образом, высокая статическая точность достигается благодаря тому, что корректирующий сигнал UK не содержит постоянной составляющей.
Формула изобретения Способ управления импульсным стабилизатором постоянного напряжения, включающим регулирующий элемент, дроссель фильтра и цепь обратной связи, заключающийся в том, что регулирующий элемент включают в тактовые моменты времени, измеряют напряжение на дросселе и формируют пропорционально этому напряжению корректирующий сигнал, который суммируют с сигналом рассогласования цепи обратной связи, затем суммарный сигнал интегрируют и сравнивают с опорным сигналом, в момент равенства проинтегрированного и опорного сигналов выключают регулирующий элемент, отличающийся тем, что, с целью улучшения динамических характеристик и повышения точности стабилизации, перед операцией суммирования сигнала обратной связи и корректирующего, из последнего исключают постоянную составляющую, а корректирующий сигнал суммируют с сигналом обратной связи на интервалах времени от тактовых моментов до моментов равенства проинтегрированного сигнала с опорным и прекращают суммирование от указанных моментов равенства до очередных тактовых моментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Высоковольтный стабилизированный источник напряжения постоянного тока | 1985 |
|
SU1309211A1 |
| Способ управления импульсным преобразователем напряжения | 1989 |
|
SU1746369A1 |
| Стабилизирующий преобразователь напряжения постоянного тока | 1988 |
|
SU1646027A1 |
| Компенсационно-параметрический импульсный стабилизатор постоянного напряжения | 1987 |
|
SU1437845A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| Многофазный импульсный стабилизатор постоянного напряжения | 1988 |
|
SU1561068A1 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА ЖИДКИХ СРЕД ЛЮМИНЕСЦЕНТНЫМ МЕТОДОМ | 2001 |
|
RU2200315C2 |
| Вентильный электродвигатель | 1985 |
|
SU1336186A1 |
| Стабилизированный преобразователь переменного напряжения в переменное для нелинейной нагрузки | 1989 |
|
SU1621130A1 |
Изобретение относится к преобразовательной технике и может быть использовано в стабилизированных источниках электропитания повышенной точности. Целью изобретения является улучшение динамических характеристик и повышение точности стабилизации. Поставленная цель достигается тем, что в тактовые моменты времени периодически включается регулирующий элемент 1, выделяется корректирующий сигнал, повторяющий по форме импульсное напряжение на дросселе 8 импульсного стабилизатора. Корректирующий сигнал складывается с сигналом рассогласования. Суммарный сигнал интегрируется и сравнивается с опорным на компараторе 4, в результате чего вырабатывается управляющий импульс включения регулирующего элемента 1. Причем корректирующий сигнал поступает в цепь регулирования на интервалах времени от тактовых до очередных моментов равенства проинтегрированного напряжения с опорным, а на интервалах от указанных моментов равенства до очередных тактовых импульсов включения регулирующего элемента 1 корректирующий сигнал в цепь регулирования не поступает. Отсутствие постоянной составляющей в ко- ректирующем сигнале обеспечивает высокую точность стабилизации выходного напряжения стабилизатора. 2 ил. Ј
| СПОСОБ СТАБИЛИЗАЦИИ ВЫХОДНОГО НАПРЯЖЕНИЯ | 0 |
|
SU265255A1 |
