Известна разметка поля радиоинтерференционным способом с применением подвижной и неподвижной станций и известны устройства, служащие для управления рабочими органами сельскохозяйственной машины, основанные на сдвиге фаз направленных высокочастотных синусоидальных колебаний, посылаемых передатчиком и воспринимаемых приемником, находящимся на агрегате.
Предлагаемое устройство предназначено для автоматического вождения мобильных сельскохозяйственных агрегатов вдоль заданной гиперболической линии малой кривизны в интерференционном поле синхронизированных передатчиков. Новым в нем является то, что фазовый индикатор на выходе снабжен сельсином-приемником, ротор которого при отклонении агрегата от заданной линии движения поворачивается на угол, соответствующий углу перемещения агрегата на плоскости. Кроме того, для обеспечения соответствия угловых положений ротора сельсина-приемника определенным точкам интерференционного поля в нем установлен фазорасщепитель. Последний состоит из двух жестких коаксиальных шин, между которыми включены три фазовых детектора. Вырабатываемые ими три напряжения подаются после усиления на сельсин-приемник и обуславливают отрабатываемый ротором сельсина-приемника угол поворота в каждый необходимый момент. Точки включения фазовых детекторов отстоят друг от друга на расстоянии одной щестой длины. Это обеспечивает получение постоянного фазового сдвига между тремя выходами детекторов. Индикатор может быть снабжен компенсатором накло.на антенны с группой сельсинов, с простым решающим устройством непрерывного действия,которое в первом звене
выделяет ложную информацию, а во втором- вычитает ееиз общего сигнала.
На чертеже показана схема радиоинтерференционного поля. Гиперболические координаты радиоинтерференцпонного поля при достаточном удалении от передатчиков 1, ввиду малой кривизны, практически приближаются к прямоугольным. Четыре передатчика, работающие попарно, создают два интерференционных поля,
скрещенных под прямым углом. Стрелкой А
на чертеже изображен путь агрегата на поле,
который пересекает изофазы, перемещаясь от
одного передатчика к другому.
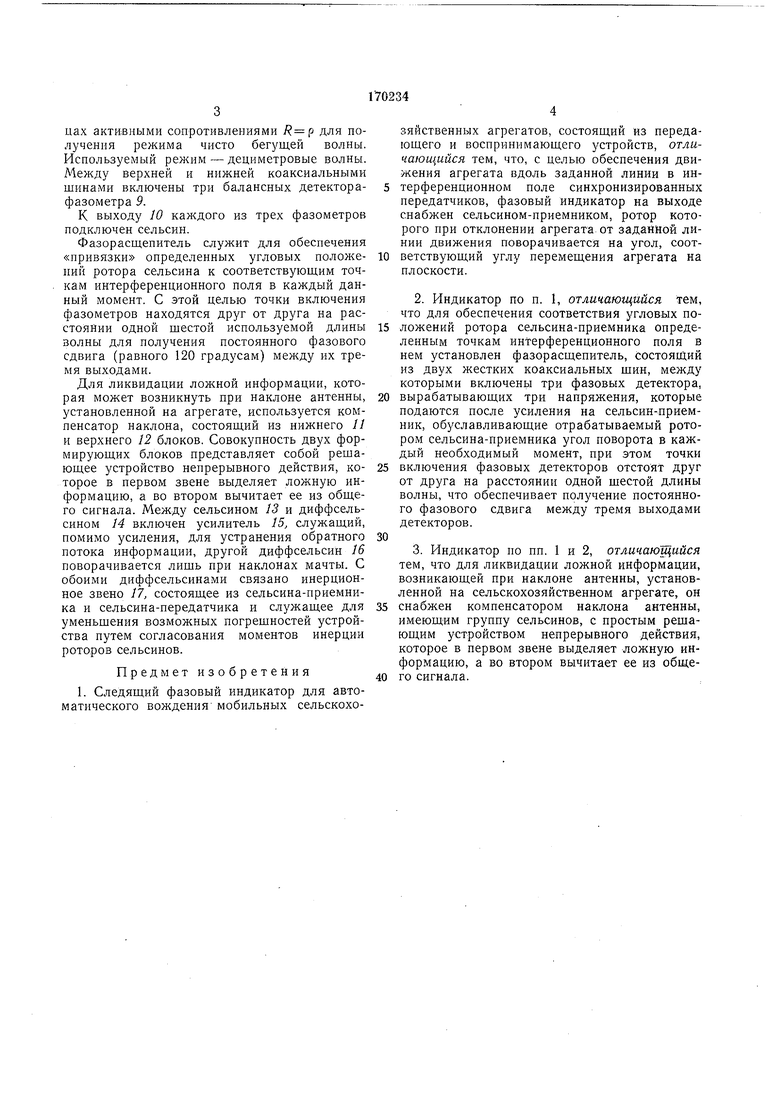
Следящий фазовый индикатор состоит, из
двух отдельных приемников 2 и 3, принимающих сигналы ведущего 4 и ведомого 5 передатчиков, которые приводятся к общей масштабной частоте и заводятся по кабельным ветвям б и 7 в фазорасщепитель, имеющий
пах активными сопротивлениями для получения режима чисто бегущей волны. Используемый режим - дециметровые волны. Между верхней и нижней коаксиальными шинами включены три балансных детекторафазометра 9.
К выходу 10 каждого из трех фазометров подключен сельсин.
Фазорасщепитель служит для обеспечения «привязки определенных угловых положений ротора сельсина к соответствующим точкам интерференционного поля в каждый данный момент. С этой целью точки включения фазометров находятся друг от друга на расстоянии одной шестой используемой длины волны для получения постоянного фазового сдвига (равного 120 градусам) между их тремя выходами.
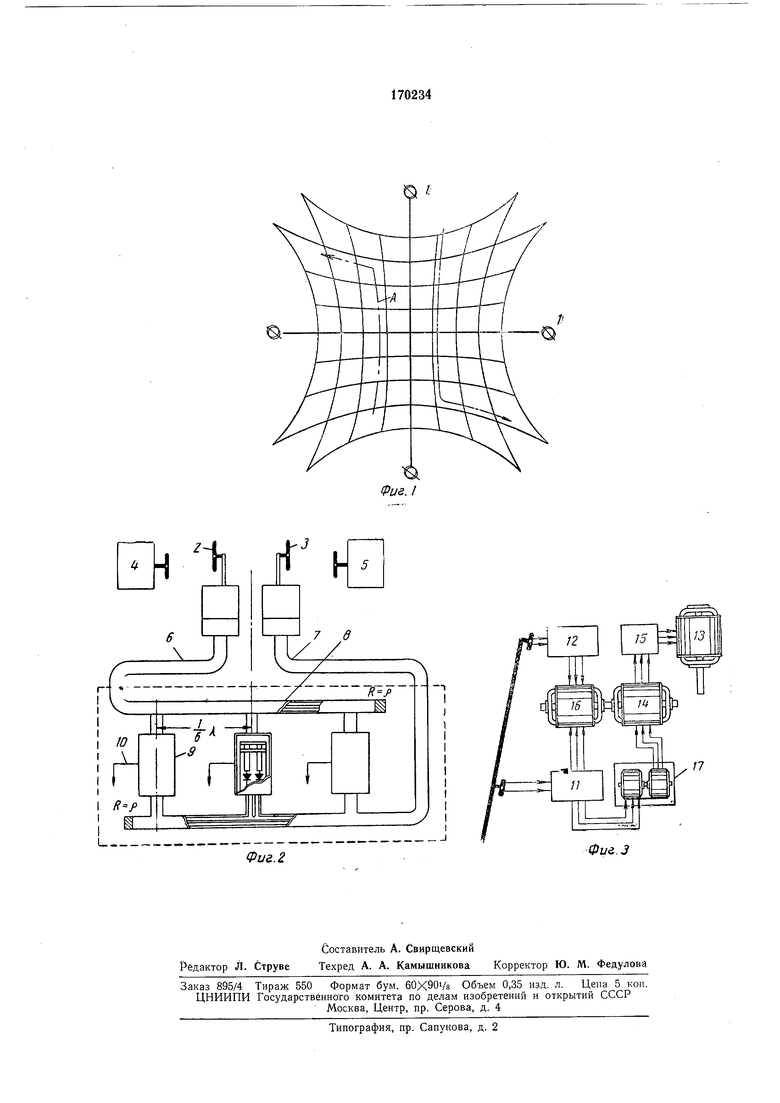
Для ликвидации ложной информации, которая может возникнуть при наклоне антенны, установленной на агрегате, используется компенсатор наклона, состоящий из нижнего 11 и верхнего 12 блоков. Совокупность двух формирующих блоков представляет собой решающее устройство непрерывного действия, которое в первом звене выделяет ложную информацию, а во втором вычитает ее из общего сигнала. Между сельсином 13 и диффсельсииом 14 включен усилитель 15, служащий, помимо усиления, для устранения обратного потока информации, другой диффсельсин 16 поворачивается лишь при наклонах мачты. С обоими диффсельсинами связано инерционное звено 17, состоящее из сельсина-приемника и сельсина-передатчика и служащее для уменьшения возможных погрешностей устройства путем согласования моментов инерции роторов сельсинов.
Предмет изобретения
1. Следящий фазовый индикатор для автоматического вождения мобильных сельскохозяйственных агрегатов, состоящий из передающего и воспринимающего устройств, отличающийся тем, что, с целью обеспечения движения агрегата вдоль заданной линии в интерференционном поле синхронизированных передатчиков, фазовый индикатор на выходе снабжен сельсином-приемником, ротор которого при отклонении агрегата от заданной линии движения поворачивается на угол, соответствующий углу перемещения агрегата на плоскости.
2.Индикатор по п. 1, отличающийся тем, что для обеспечения соответствия угловых положений ротора сельсина-приемника определенным точкам интерференционного поля в нем установлен фазорасщепитель, состоящий из двух жестких коаксиальных шин, между которыми включены три фазовых детектора,
вырабатывающих три напряжения, которые подаются после усиления на сельсин-приемник, обуславливающие отрабатываемый ротором сельсина-приемника угол поворота в каждый необходимый момент, при этом точки
включения фазовых детекторов отстоят друг от друга на расстоянии одной шестой длины волны, что обеспечивает получение постоянного фазового сдвига между тремя выходами детекторов.
3.Индикатор ио пп. 1 и 2, отличающийся тем, что для ликвидации ложной информации, возникающей при наклоне антенны, установленной на сельскохозяйственном агрегате, он
снабжен компенсатором наклона антенны, имеющим группу сельсинов, с простым решающим устройством непрерывного действия, которое в первом звене выделяет ложную информацию, а во втором вычитает ее из общего сигнала.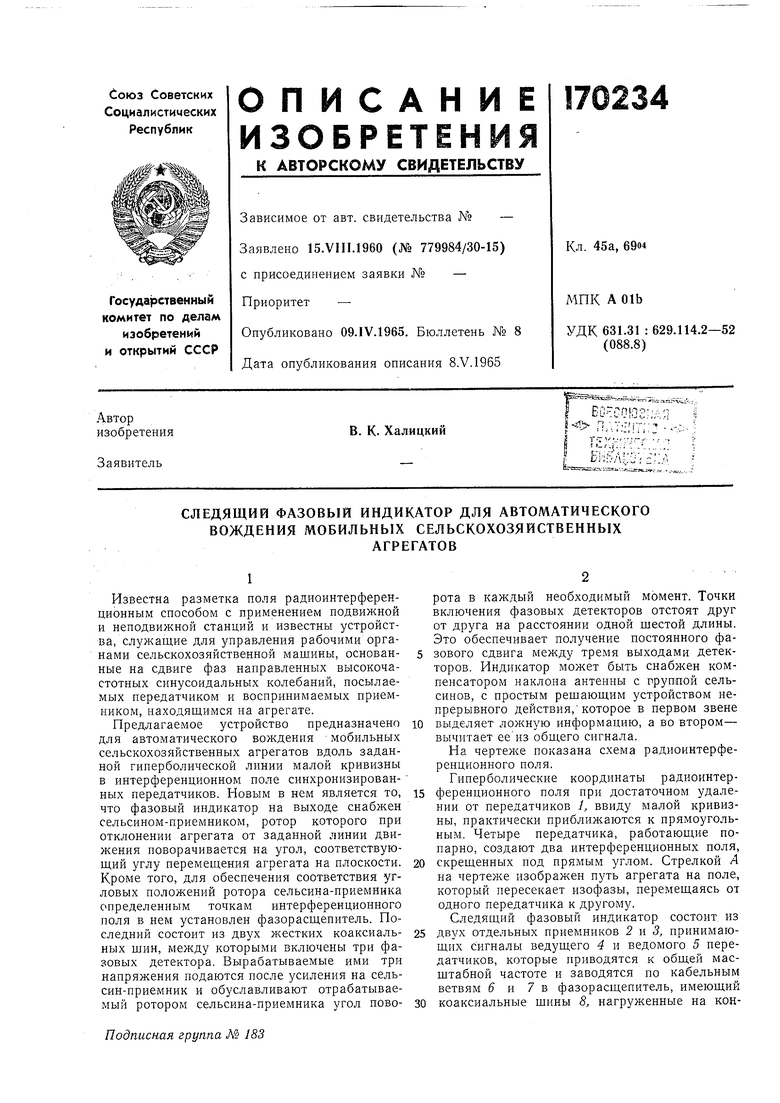
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| Фазометр с круговым отсчетом | 1977 |
|
SU748279A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565067C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОННОЙ КОНЦЕНТРАЦИИ В ЗАДАННОЙ ОБЛАСТИ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208814C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038607C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННАЯ РАДИОМАЯЧНАЯ СИСТЕМА ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2745836C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| Способ измерения поляризационных характеристик радиолокационной цели и устройство для его реализации | 1984 |
|
SU1232034A1 |
| Устройство дистанционного измерения диэлектрической проницаемости плоскослоистых диэлектриков естественного происхождения с суммарно-разностной обработкой интерференционных сигналов | 2024 |
|
RU2821440C1 |
Фиг. 2
Фиг. J
