Группа изобретений относится к радиопеленгации и может использоваться для определения пеленга источника радиоизлучения (ИРИ) сложных сигналов в условиях наклона антенны относительно плоскости пеленгования.
Известен способ определения пеленга, основанный на использовании эффекта Доплера, обусловленного фазовой модуляцией, возникающей при круговом вращении приемной антенны (В.А. Вартанесян, Э.Ш. Гойхман, М.И. Рогаткин. Радиопеленгация. - М., Воениздат, 1966, 248 с. /§ 5.4/), в результате чего мгновенную ЭДС в антенне можно записать как

Здесь: λ - длина волны пеленгуемого сигнала, α - азимут на передатчик, R - радиус антенны, а Ωt - текущее значение азимута вращения антенны. С учетом этого выражения при малых значениях индекса фазовой модуляции 2πR/λ и с помощью фазового детектора можно выделить колебания модулирующей частоты Ω, фаза которого соответствует азимуту α на ИРИ.
Известно также устройство для определения пеленга этим способом (Беляевский Л.С., Новиков В.С., Олянюк П.В. Основы радионавигации: Учебник для вузов гражд. авиации. М.: Транспорт, 1982. - с. 288. Стр. 76, рис. 3.10). Устройство содержит антенну, в состав которой входит вращающийся по окружности диполь (или N переключаемых диполей и коммутатор) и неподвижный диполь, расположенный в центре окружности, два приемника, входы которых подключены к соответствующим выходам антенны (вращающегося и неподвижного диполей), а выходы соединены с фазовым детектором. Вращение антенны (переключение диполей) осуществляется синхронно с генератором опорных напряжений, а определение азимута выполняется с помощью фазометра, входы которого подключены к выходу фазового детектора и генератору опорных напряжений.
В этом устройстве и данном способе пеленгования при малых значениях R/λ напряжение на выходе фазового детектора содержит, в основном, первую гармонику частоты вращения антенны Ω. При больших значениях R/λ форма кривой напряжения резко искажается, что приводит к ошибкам определения направления на ИРИ. Потенциальную точность определения пеленга при этом способе для выражения среднеквадратической ошибки (СКО) можно в соответствии с (Монаков А.А. Теоретические основы радионавигации: Учеб. Пособие / СПбГУАП. СПб., 2002. стр. 54, уравнение 5.27) записать в виде
Здесь q2 - отношение сигнал/шум, J1(kR) - функция Бесселя первого рода для выделения первой гармоники аргумента.
Известен также способ радиопеленгации, также основанный на эффекте Доплера, но обусловленный уже взаимной фазовой модуляцией, возникающей при круговом вращении двух приемных антенн (В.А. Вартанесян, Э.Ш. Гойхман, М.И. Рогаткин. Радиопеленгация. - М., Воениздат, 1966, 248 с. /§ 5.4/), который называется дифференциально-фазовым и является наиболее близким по совокупности существенных признаков к предлагаемому способу. Согласно данному способу измеряется разность фаз между напряжениями, снимаемыми с двух синхронно вращающихся (переключающихся) с угловой скоростью Ω, сдвинутых между собой на угол β диполей. В этом способе индекс фазовой модуляции будет иметь вид
Известны также устройства для определения пеленга данным способом (Беляевский Л.С., Новиков В.С., Олянюк П.В. Основы радионавигации: Учебник для вузов гражд. авиации. М.: Транспорт, 1982. - с. 288. Стр. 80, рис. 3.12) и (Монаков А.А. Теоретические основы радионавигации: Учеб. пособие / СПбГУАП. СПб., 2002. 70 с.: ил. стр. 55, рис. 5.13). Последнее выбрано в качестве прототипа. Устройство содержит антенну, в состав которой входят два вращающихся по окружности диполя (или два попарно переключаемых диполя с помощью коммутатора: [1 и 2], [2 и 3], …, [N-1 и N], [N и 1], и т.д.), два приемника, входы которых подключены к соответствующим выходам антенны (через коммутатор к двум попарно переключаемым диполям), выход первого приемника соединен с первым входом фазового детектора, а выход второго приемника через фазовращатель на π/2 соединен со вторым входом фазового детектора. Вращение антенны (переключение диполей) осуществляется синхронно с генератором опорных напряжений, а определение азимута выполняется с помощью фазометра, входы которого подключены к выходу фазового детектора и генератору опорных напряжений. Потенциальную точность при дифференциально-фазовом способе пеленгования для выражения СКО можно в соответствии (Монаков А.А. Теоретические основы радионавигации: Учеб. пособие / СПбГУАП. СПб., 2002. 70 с.: ил. Стр. 56, уравнение 5.31) записать в виде

При использовании данного способа и устройства в момент определения пеленга существенную ошибку вносит положение антенны относительно плоскости пеленгования. Этот эффект особенно сильно проявляется для мобильных радиопеленгаторов, которые устанавливаются на корпус воздушного судна (ВС). Дело в том, что для стационарных радиопеленгаторов этот эффект не заметен по причине малого отклонения антенны от плоскости пеленгования, т.к. дальность до ИРИ несоизмеримо больше его высоты, т.е. отклонения от плоскости пеленгования. Для мобильных радиопеленгаторов, установленных на ВС, это отклонение может быть очень большим в момент выполнения последним маневра.
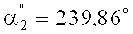
Причину возникновения ошибок при определении пеленга, связанных с положением антенны относительно плоскости пеленгования, можно пояснить, используя простые геометрические закономерности, представленные на фигуре 1.
Если антенну, которая представляет собой набор равномерно расположенных между собой по окружности диполей, наклонить к плоскости пеленгования, то ее проекция на эту плоскость примет форму эллипса. В зависимости от угла наклона отношение между полуосями этого эллипса меняется, т.е. чем больше наклон, тем больше он становится "сплюснутым".
Теперь, если с направления α1 падает от ИРИ плоская волна, то для окружности в точке 1 это направление перпендикулярно окружности. Это же направление перпендикулярно эллипсу в точке 2, поэтому если из точки 2 в центр провести прямую линию, то она уже с вертикальной линией начала отсчета составит угол α2. Разница Δα=α2-α1 и есть ошибка измеренного значения пеленга, которая зависит от наклона антенны. Кроме того, она является периодической и также зависит от направления на ИРИ. Причем в первой и третьей четвертях эллипса эта ошибка положительная, во второй и четвертой отрицательная, а в направлениях, близких к малой и большой осям эллипса, она минимальная. При отклонениях антенны радиопеленгатора от нормали на 40°…60°, а это вполне возможно для ВС, на котором установлена антенна, ошибка может достигать 20°…30° и более.
Техническим результатом группы изобретений является повышение точности определения пеленга за счет компенсации ошибок, обусловленных наклоном антенны относительно плоскости пеленгования.
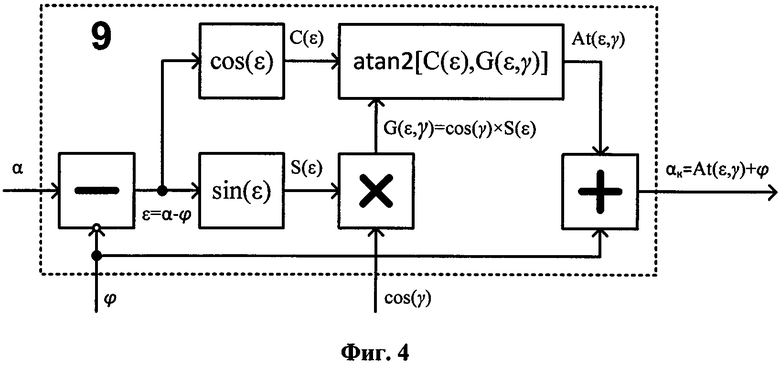
Указанный технический результат достигается тем, что в способе определения пеленга источника радиоизлучений бортовым радиопеленгатором воздушного судна (ВС) дифференциально-фазовым методом, в котором пеленг формируют из фазы (α) модулирующего колебания, согласно изобретению из угловых значений тангажа (θ) и крена (γ) ВС формируют параметр наклона антенны радиопеленгатора [cos(γ)] относительно плоскости пеленгования и угол (φ) направления малой оси эллипса, ее проекции на плоскость пеленгации, относительно курса ВС, который вычитают из значения фазы, из этой разности формируют значения функций косинуса {cos(α-φ)} и синуса {sin(α-φ)}, затем функцию синуса умножают на параметр наклона {cos(γ)·sin(α-φ)}, после чего вычисляют функцию двойного арктангенса, значение которой суммируют с ранее вычтенным угловым значением направления малой оси эллипса (φ) относительно курса в плоскости пеленгации {atan2[cos(α-φ), cos(γ)·sin(α-φ)]+φ}, при этом результат суммирования является искомым пеленгом.
В устройстве для осуществления способа указанный технический результат достигается тем, что в бортовой радиопеленгатор, содержащий последовательно соединенные антенну, состоящую из N диполей, расположенных по окружности, коммутатор и два приемника, фазовращатель на π/2 и фазовый детектор, первый вход которого подключен к выходу первого приемника, а второй - через фазовращатель - к выходу второго приемника, фазометр и генератор опорных напряжений, выходы которого соединены с управляющим входом коммутатора и вторым входом фазометра, первый вход которого соединен с выходом фазового детектора, согласно изобретению в него введены компенсатор наклона антенны и преобразователь координат пространственной ориентации (ПКПО), при этом вход компенсатора наклона антенны соединен с выходом фазометра, управляющие входы соединены с выходами ПКПО, а выход компенсатора наклона антенны является выходом радиопеленгатора, при этом входы ПКПО являются управляющими входами радиопеленгатора.
Известно, что пространственное положение ВС относительно Земли определяется углами тангажа (θ), крена (γ) и рысканья (Ψ) Наклон антенны относительно плоскости измерения определяется только углами тангажа и крена:
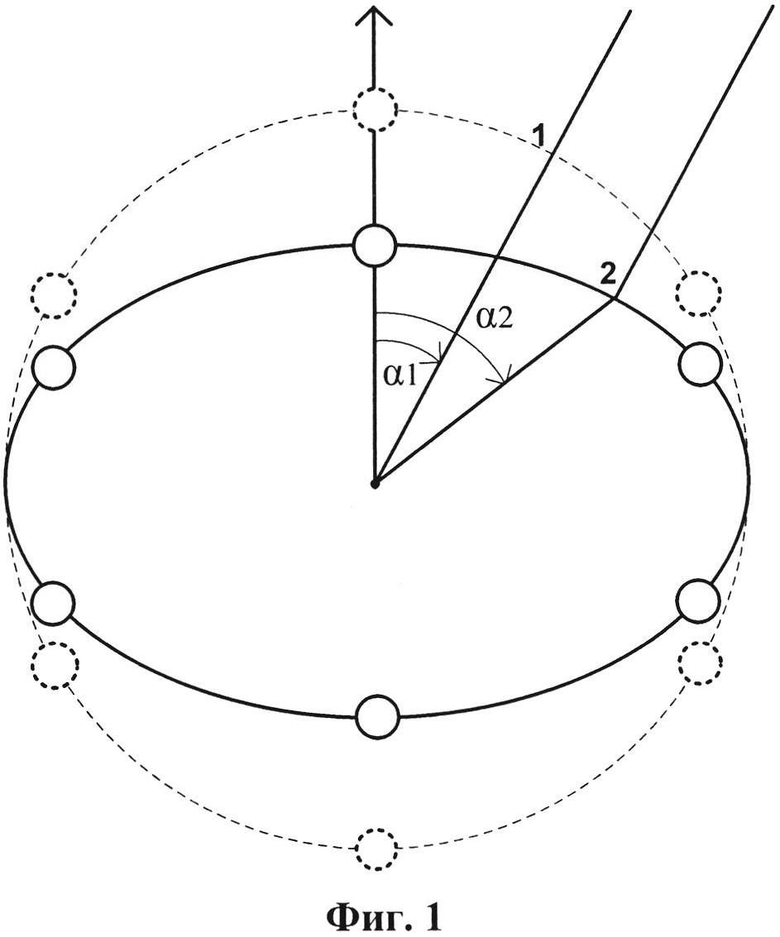
θ - Тангаж, это угол между продольной осью ВС и местной горизонтальной плоскостью. Угол тангажа положителен, когда продольная ось находится выше горизонтальной плоскости. На фиг. 2 поворот осей X→X′ и Z→Z′, вокруг оси Y.
γ - Крен, это угол между поперечной осью OZ″ (симметрии ВС) и осью OZ, нормальной системы координат, смещенной в положение, при котором угол рыскания равен нулю. Он связан с углом β, который на фиг. 2 определен как поворот осей Z′→Z″ и Y→Y″, вокруг оси X′.
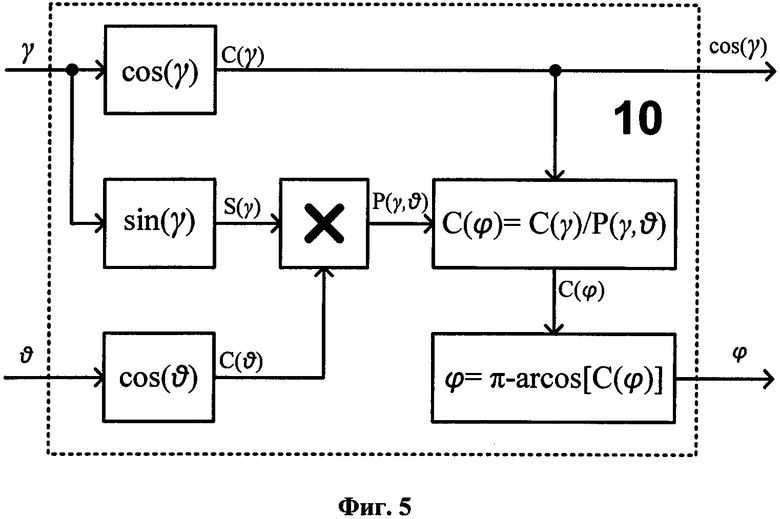
Эти характеристики на борту современного ВС используются пилотом и автоматикой для эффективного управления им, а также фиксируются в аппаратуре с целью диагностики и последующего анализа, т.е. информация о пространственном положении ВС на борту всегда присутствует и ей можно воспользоваться. Для этого достаточно из угловых пространственных координат θ и γ сформировать значения: cos(γ), который определяет отношение осей (a, в) эллипса, и угол φ, определяющий направление его малой оси относительно курса ВС, с помощью которых и выполняется компенсация ошибки, обусловленной отклонением положения антенны от плоскости пеленгования.
В соответствии с теоремой косинусов для трехгранных углов (на фиг. 2 -
cos(β) и cos(γ)), 
где cos(Z) - косинус двугранного угла при ребре OZ, а cos(Z′) - при ребре OZ′, но т.к.

Соответственно 

Согласно заявляемому способу определения пеленга угловые координаты ориентации ВС преобразуются к значениям, которые определяют форму эллипса, как проекции круговой антенны на плоскость пеленгации, и направление его малой оси относительно курса ВС, которое выбрано в качестве условно нулевого направления, относительно которого выполняется компенсация. Затем из значения фазы, соответствующей пеленгу, определенному с ошибкой из-за наклона антенны, вычитается угловое значение направления малой оси эллипса относительно курса, что позволяет условно нулевое положение азимута совместить с этой осью, независимо от положения ИРИ и наклона антенны. После чего выполняется компенсация ошибки определения пеленга относительно условно нулевого направления, при этом величина ошибки также зависит от направления относительно осей эллипса, затем к полученному результату добавляется ранее вычтенное значение этого условно нулевого направления. Этими операциями достигается точное определение ошибки, обусловленной наклоном антенны, и ее компенсация, с этой целью в устройство определения пеленга, введены компенсатор наклона антенны и ПКПО.
Охарактеризованная указанными выше существенными признаками группа изобретений на дату подачи заявки не известна в Российской Федерации и за границей и отвечает требованиям критерия "новизна".
Заявителем не выявлены технические решения, имеющие признаки, совпадающие с совокупностями отличительных признаков заявляемых изобретений, обеспечивающих достижение заявляемого технического результата, в связи с чем можно сделать вывод о соответствии изобретений условию патентоспособности "изобретательский уровень".
Изобретения могут быть реализованы промышленным способом с использованием известных технических средств, технологий и материалов и соответствуют требованиям условия патентоспособности "промышленная применимость".
Изобретения поясняются графическими материалами, где:
- на фиг. 1 показана причина возникновения ошибки при определении пеленга из-за наклона антенны, проекция которой на плоскость пеленгования из круга преобразуется в эллипс;
- на фиг. 2 показана связь направления (φ) малой оси эллипса и отношение его осей (a, в), определяемое значением cos(γ), с угловыми координатами ориентации (θ и γ);
- на фиг. 3 приведена структурная схема бортового радиопеленгатора;
- на фиг. 4 - схема компенсатора наклона антенны;
- на фиг. 5 - схема преобразователя координат пространственной ориентации.
В способе определения пеленга согласно изобретению:
- угловые координаты пространственной ориентации θ - тангаж и γ - крен преобразуют к значению cos(γ), которое определяет отношение осей (a, в) эллипса, и углу (φ) направления его малой оси относительно курса;
- затем этот угол вычитают из значения фазы, соответствующей пеленгу, определенному с ошибкой из-за наклона антенны;
- используя полученный результат, вычисляют тригонометрические функции cos(α-φ) и sin(α-φ), при этом вторую умножают еще на значение cos(γ);
- после чего, используя пару этих значений, вычисляют обратную функцию - двойной арктангенс atan2[cos(α-φ), cos(γ)·sin(α-φ)], результат которой есть компенсация ошибки пеленга относительно малой оси эллипса;
- полученный результат суммируют с ранее вычтенным углом (φ) направления малой оси эллипса, после чего значения пеленга определено уже относительно первоначального курса ВС, но без ошибки, обусловленной наклоном антенны.
Бортовой радиопеленгатор, структурная схема которого представлена на фиг. 3, включает последовательно соединенные антенну 1, состоящую из N диполей, расположенных по окружности, коммутатор 2 и два приемника 3 и 4, а также фазовращатель 5 на π/2 и фазовый детектор 6, первый вход которого подключен к выходу первого приемника 3, а второй через фазовращатель 5 к выходу второго приемника 4, а также фазометр 7 и генератор опорных напряжений 8, выходы которого соединены с управляющим входом коммутатора 2 и вторым входом фазометра 7, первый вход которого соединен с выходом фазового детектора 6.
Согласно изобретению в радиопеленгатор введены компенсатор наклона антенны (КНА) 9 и преобразователь координат пространственной ориентации (ПКПО) 10, при этом вход КНА 9 соединен с выходом фазометра 7, управляющие входы соединены с выходами ПКПО 10, а выход КНА 9 является выходом радиопеленгатора, при этом входы ПКПО 10 являются управляющими входами радиопеленгатора.
Способ определения пеленга реализуется предлагаемым устройством следующим образом.
Под действием электромагнитного поля, которое создается пеленгуемым ИРИ, на диполях антенны 1 формируются сигналы, значение фаз которых зависит от направления на ИРИ и наклона антенны бортового радиопеленгатора. Эти сигналы, переключаемые коммутатором 2, через приемники 3 и 4, а также фазовращатель 5 поступают на входы фазового детектора 6, где выделяется низкочастотная гармоника, соответствующая частоте модуляции, определяемой переключением диполей, которая поступает на первый вход фазометра 7. Одновременно с генератора опорных напряжений 8 управляющие сигналы поступают на коммутатор 2 и второй вход фазометра 7. На выходе фазометра формируется значение фазы, соответствующее направлению на ИРИ, смещенное относительно истинного направления на величину ошибки, обусловленной наклоном антенны, которое поступает на КНА 9. Одновременно на ПКПО 10 поступают угловые значении ориентации θ - тангаж и γ - крен ВС, на котором установлена антенна пеленгатора, и преобразуются в значения, которые определяют параметры эллипса и ориентацию его малой оси относительно курса ВС. С выхода ПКПО 10 эти значения поступают на соответствующие управляющие входы КНА 9, где из значения фазы, определенной с учетом наклона антенны, вычитается угловое значение направления малой оси эллипса. Это позволяет определить величину ошибки, которая зависит от параметров эллипса и направления на ИРИ относительно его малой оси, совмещенной с условно нулевым направлением. Данная ошибка исключается из значения фазы относительно условно нулевого направления, и после этого полученный результат суммируется с ранее вычтенным угловым направлением малой оси эллипса, что и является истинным направлением на ИРИ. При определении ошибки, и после ее исключения, сначала вычитается угловое значение направления малой оси эллипса, а затем это же значение суммируется. Кроме того, зависимость данной ошибки от перемещения по дуге эллипса плавно меняется, поэтому неточность определения направления малой оси эллипса мало влияет на результат компенсации ошибок, обусловленных наклоном антенны.
Данный способ определения пеленга источника радиоизлучения (ИРИ) сложных сигналов в условиях наклона антенны относительно плоскости пеленгования подтверждается результатами моделирования.
При моделировании задали значения углов крена γ=0° и тангажа θ=45°, а истинное положение ИРИ задали в направлениях α1=120° и α2=240°, соответствующих второй и третьей четвертям. С учетом этого были определены их направления 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕЛЕНГОВАНИЯ РАДИОИЗЛУЧЕНИЙ | 2009 |
|
RU2420753C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| АМПЛИТУДНЫЙ РАДИОПЕЛЕНГАТОР (ВАРИАНТЫ) | 2013 |
|
RU2526536C1 |
| СПОСОБ АМПЛИТУДНОГО ПЕЛЕНГОВАНИЯ ИНТЕРФЕРИРУЮЩИХ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2722715C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЕЛЕНГА ПОДВИЖНОГО ОБЪЕКТА | 2012 |
|
RU2507530C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЕЛЕНГА ПОДВИЖНОГО ОБЪЕКТА | 2012 |
|
RU2507529C1 |
| СПОСОБ САМОНАВЕДЕНИЯ НА НАЗЕМНУЮ ЦЕЛЬ | 2018 |
|
RU2714531C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2003 |
|
RU2258242C2 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2014 |
|
RU2567850C1 |
Группа изобретений относится к радиопеленгации и может использоваться для определения пеленга источников радиоизлучения (ИРИ) сложных сигналов в условиях наклона антенны относительно плоскости пеленгования. Достигаемый технический результат - повышение точности определения пеленга. Указанный результат достигается за счет того, что изобретения основаны на использовании дифференциально-фазового метода. Указанный результат достигается за счет того, что пеленг формируют из фазы (α) модулирующего колебания. Из угловых значений тангажа (θ) и крена (γ) воздушного судна (ВС) формируют параметр наклона антенны радиопеленгатора [cos(γ)] относительно плоскости пеленгования и угол (φ) направления малой оси эллипса, ее проекции на плоскость пеленгации, относительно курса ВС, который вычитают из значения фазы. Из полученной разности формируют значения функций косинуса {cos(α-φ)} и синуса {sin(α-φ)}, затем функцию синуса умножают на параметр наклона {cos(γ)·sin(α-φ)}, после чего вычисляют функцию двойного арктангенса. Значение функции суммируют с ранее вычтенным угловым значением направления малой оси эллипса (φ) относительно курса в плоскости пеленгации {atan2[cos(α-φ), cos(γ)·sin(α-φ)]+φ}, при этом результат суммирования является искомым пеленгом. Радиопеленгатор, реализующий способ, содержит антенну, состоящую из N диполей, расположенных по окружности, коммутатор, два приемника, фазовращатель на π/2, компенсатор наклона антенны и преобразователь координат пространственной ориентации, соединенные между собой определенным образом. 2 н.п. ф-лы, 5 ил. 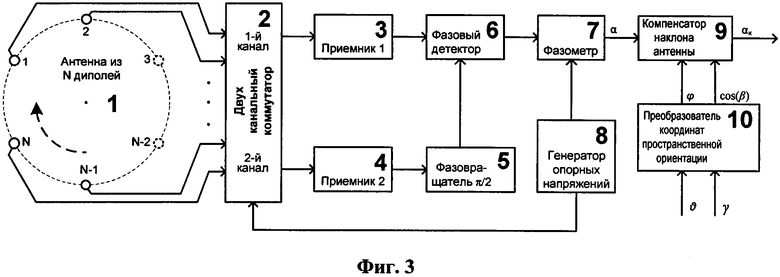
1. Способ определения пеленга источника радиоизлучений бортовым радиопеленгатором воздушного судна (ВС) дифференциально-фазовым методом, в котором пеленг формируют из фазы (α) модулирующего колебания, отличающийся тем, что из угловых значений тангажа (θ) и крена (γ) ВС формируют параметр наклона антенны радиопеленгатора [cos(γ)] относительно плоскости пеленгования и угол (φ) направления малой оси эллипса, ее проекции на плоскость пеленгации, относительно курса ВС, который вычитают из значения фазы, из этой разности формируют значения функций косинуса {cos(α-φ)} и синуса {sin(α-φ)}, затем функцию синуса умножают на параметр наклона {cos(γ)·sin(α-φ)}, после чего вычисляют функцию двойного арктангенса, значение которой суммируют с ранее вычтенным угловым значением направления малой оси эллипса (φ) относительно курса в плоскости пеленгации {atan2[cos(α-φ), cos(γ)·sin(α-φ)]+φ}, при этом результат суммирования является искомым пеленгом.
2. Бортовой радиопеленгатор, содержащий последовательно соединенные антенну, состоящую из N диполей, расположенных по окружности, коммутатор и два приемника, фазовращатель на π/2 и фазовый детектор, первый вход которого подключен к выходу первого приемника, а второй - через фазовращатель - к выходу второго приемника, фазометр и генератор опорных напряжений, выходы которого соединены с управляющим входом коммутатора и вторым входом фазометра, первый вход которого соединен с выходом фазового детектора, отличающийся тем, что в него введены компенсатор наклона антенны и преобразователь координат пространственной ориентации (ПКПО), при этом вход компенсатора наклона антенны соединен с выходом фазометра, управляющие входы соединены с выходами ПКПО, а выход компенсатора наклона антенны является выходом радиопеленгатора, при этом входы ПКПО являются управляющими входами радиопеленгатора.
| МОНАКОВ А.А | |||
| Теоретические основы радионавигации | |||
| Учебное пособие.СПб, 2002, с.55, рис.5.13 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2006 |
|
RU2306579C1 |
| US 7579989 B2, 25.08.2009 | |||
| WO 2010136409 A1, 02.12.2010 | |||
| СПОСОБ ПРОИЗВОДСТВА ОСНОВЫ ИЗ ЦИТРУСОВЫХ ПЛОДОВ ДЛЯ ЗАМУТНЁННЫХ НАПИТКОВ | 2002 |
|
RU2209016C1 |
| Устройство для формирования команд управления светофором | 1987 |
|
SU1605276A1 |

