Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в качестве микроманипулятора при позиционировании предметного столика электронного микроскопа, в электронной промышленности при изготовлении микросхем.
Цель изобретения - расширение технологических возможностей за счет повышения точности перемещения выходного звена и повышение быстродействия.
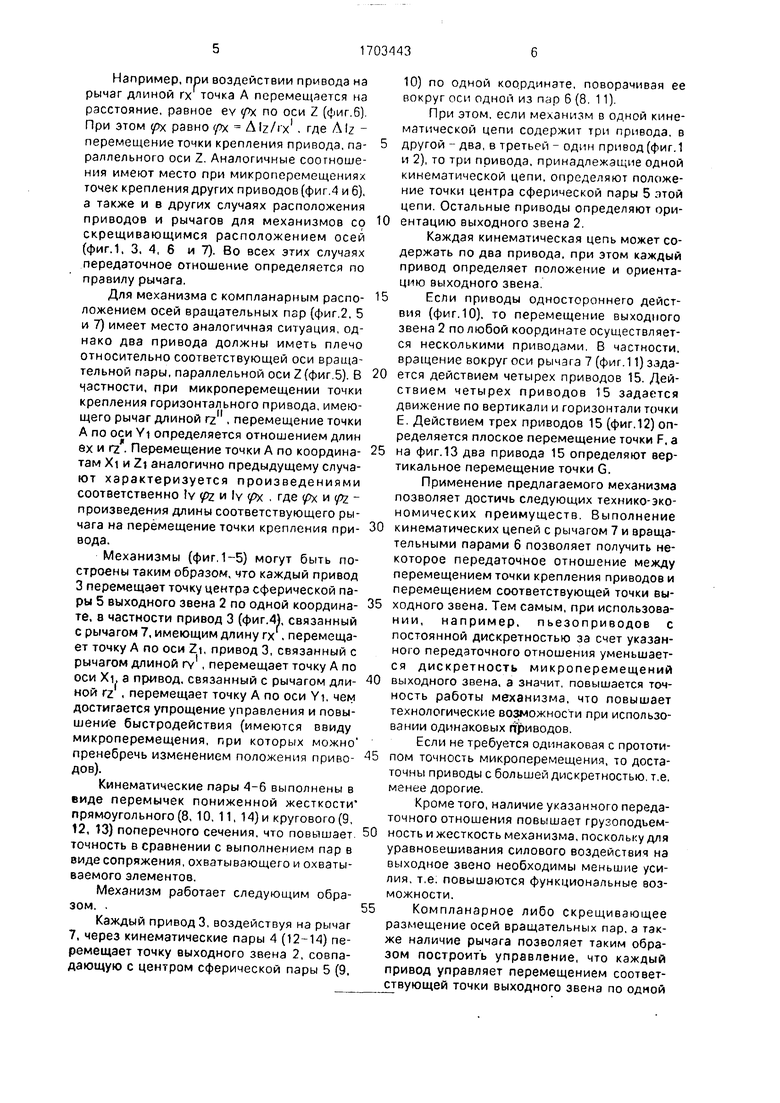
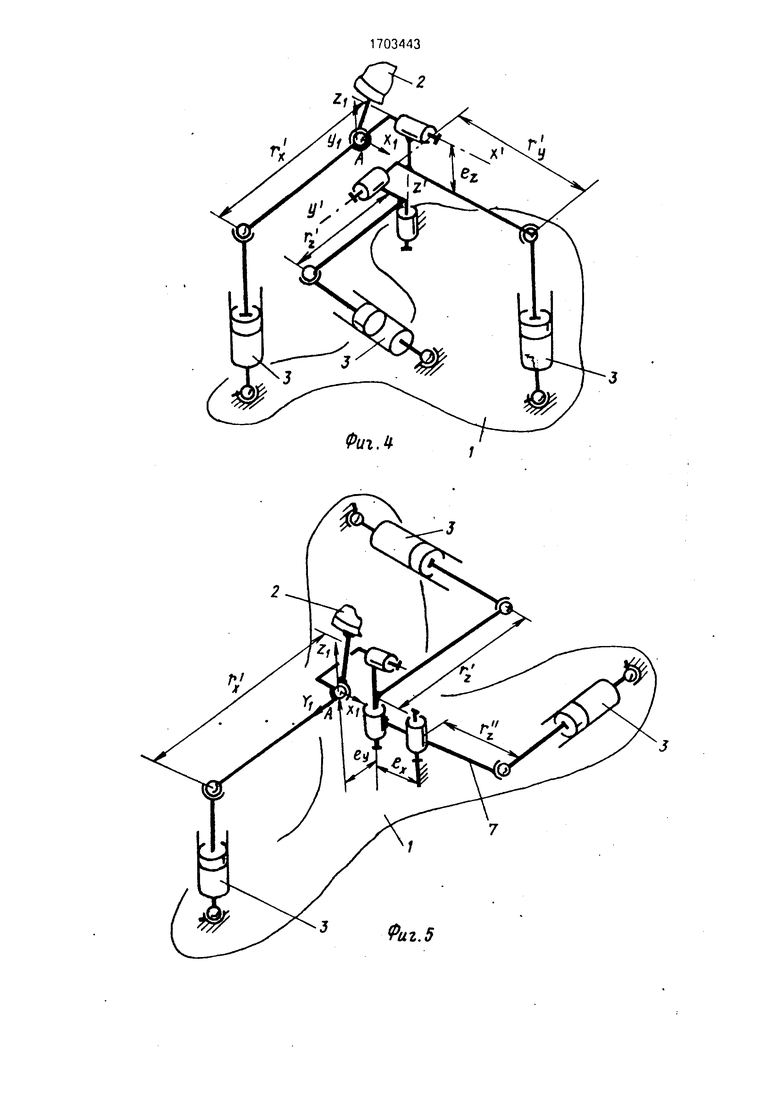
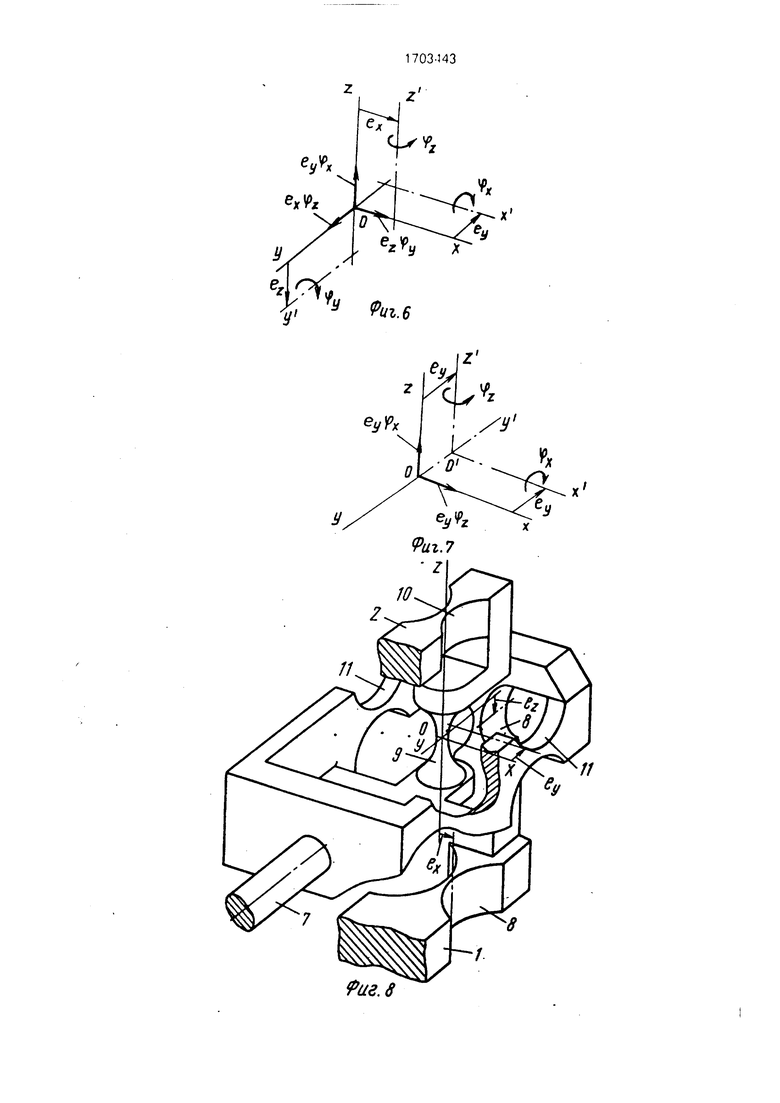
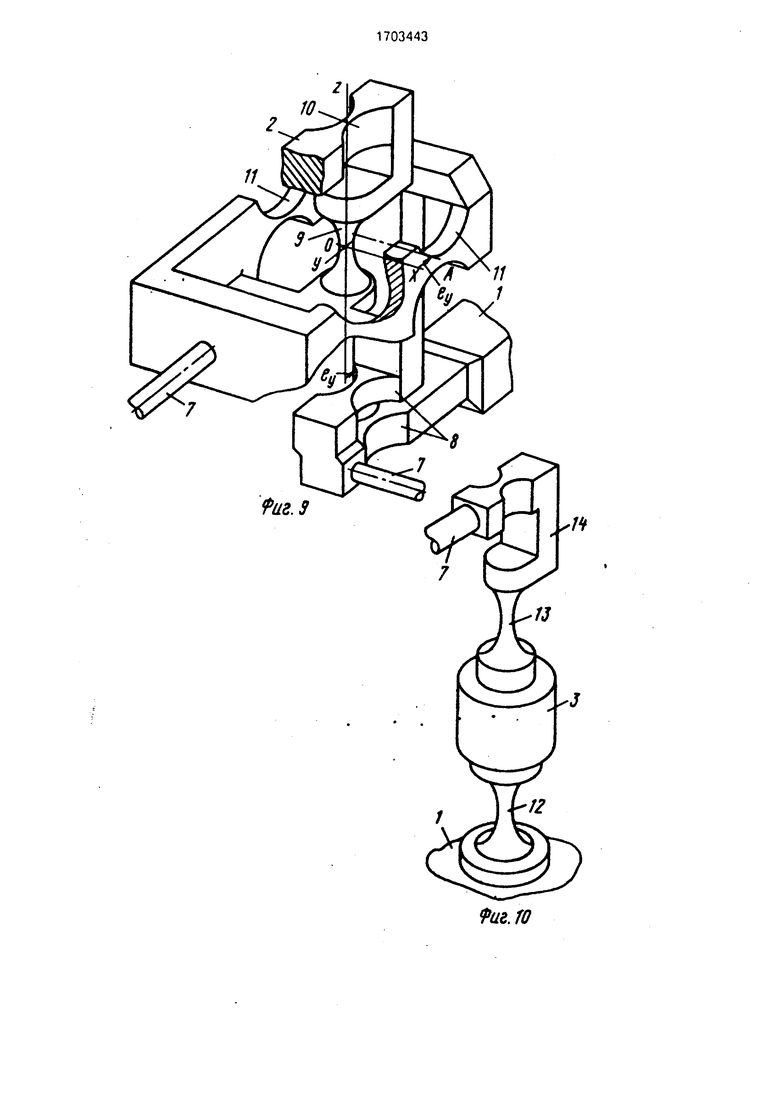
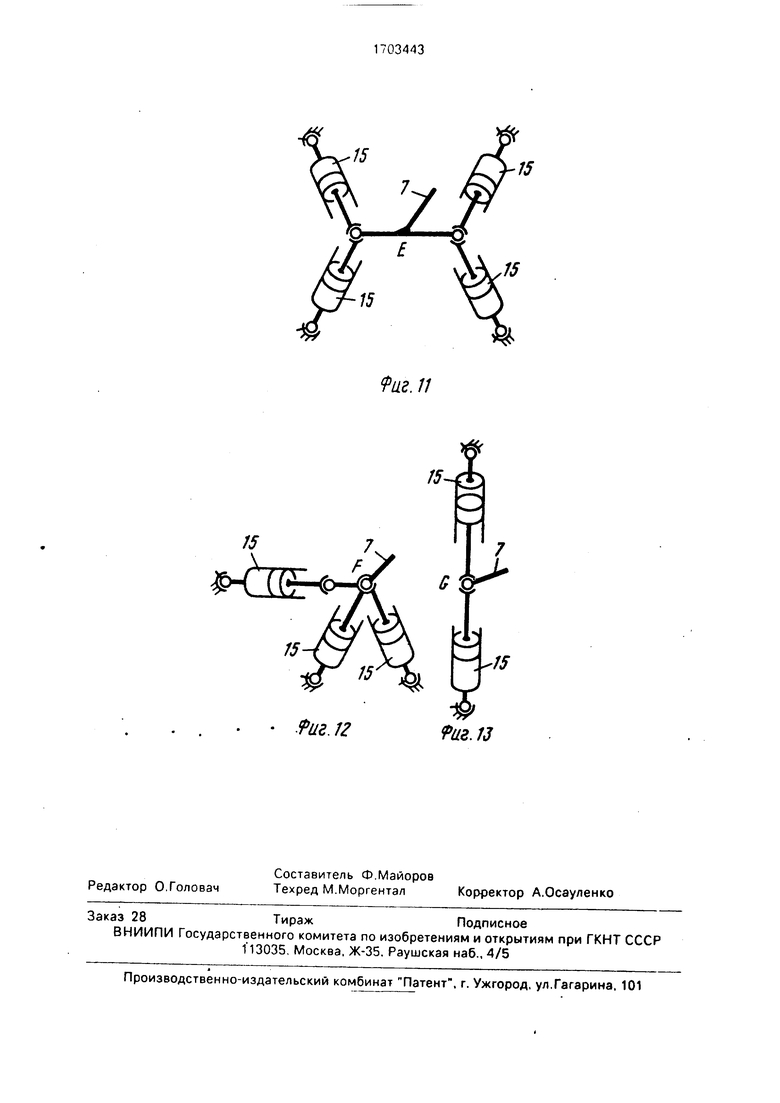
На фиг.1 изображена схема механизма, у которого в кинематических цепях вращательные пары установлены с ортогонально скрещивающимся размещением осей; на фиг.2 - схема механизма, у которого в кинематических цепях вращательные пары установлены с компланарно размещенными осями, две из которых ортогональны третьей; на фиг.З - кинематические цепи с тремя приводами механизма, изображенного на фиг.1; на фиг.4 - тоже, вариант выполнения; на фиг.5 - кинематическая цепь с тремя приводами механизма, изображенного на фиг,2; на фиг.6 - схема микроперемещений выходного звена: на фиг.7 - то же, для другого варианта выполнения кинематической цепи; на фиг.8 - кинематические цепи с гибкими элементами - перемычками пониженной жесткости; на фиг.9 - то же, вариант выполнения; на фиг.10 - присоединение привода к основанию и рычагу; на фиг. 11 - схема присоединения приводов одностороннего действия (может быть осуществлено для механизма, изображэннсго HJ фиг.1); на фиг.12 и 13 - то же, варианты
Механизм состоит из следующих элементов.
Основание 1 связано с выходным звеном 2 посредством кинематических цепей, включающих приводы 3, связанные с основанием и другими элементами кинематических цепей сферическими парами 4, одна из сферических пар 5 принадлежит выходному звену. Каждая кинема/ическая цепь содержит три вращательные пары 6, расположенные последовательно, одна из которых сопряжена с основанием 1, а другая - со сферической парой 5 выходного звена 2. Приводы соединены с остальными элементами кинематических цепей через рычаги 7. Каждая кинематическая цепь выполнена в виде единого элемента (фиг.8 и 9). Вращательные пары 6 выполнены в виде перемычек 8 пониженной жесткости, имеющих прямоугольное поперечное сечение, а сферическая пара 5 выполнена в виде совокуп- ности перемычки 9 пониженной жесткости круглого сечения и перемычки 10 пониженной жесткости прямоугольного сечения,
причем центр перемычки 9 расположен на продолжении оси перемычки 10. из вращательных пар 6. сопряженная со сферической парой 5 выходного звена, выполнена в виде совокупности двух перемычек 11 пониженной жесткости прямоугольного поперечного сечения. Приводы 3 соединены с основанием 1 и рычагом 7 посредством двухподвижной сферической пары, выпол0 ненной в виде перемычки 12 пониженной жесткости кругового сечения, а также трех- подвижной сферической парой, выполненной в виде совокупности перемычки 13 пониженной жесткости кругового сечения и
5 перемычки 14 пониженной жесткости прямоугольного сечения, причем центр перемычки пониженной жесткости кругооого сечения расположен на продолжении оси перемычки пониженной жесткости прямо0 угольного сечения. Для механизма (фмг.1) приводы 15 могут быть одностороннего действия. При этом они располагаются в одной плоскости. Четыре привода одностороннего действия заменяют три привода двусторон5 него действия (фиг. 11), три привода одностороннего действия заменяют два привода одностороннего действия (фиг.12), при этом оси этих трех приводов должны пересекаться в одной точке. Два привода односторон0 него действия имеют совпадающие оси, заменяя один привод двустороннего действия (фиг.13).
Вращательные пары 6 можно расположить либо ортогонально друг другу со скре5 щивающимся размещением осей (фиг.1, 3 и 4), либо компланарно (параллельно какой- либо плоскости), когда ось одной пары ортогональна двум остальным (фиг.2 и 5). В первом с/учае можно расположить систему
0 коорди ч г XiYiZi с осями, параллельными осям вращательных пар(фиг.4 и 6). При этом последовательность вращательных пар. параллельных соответствующим осям коордти- нат. может быть произвольная.
5Если совместить начало координат с точкой центра сферической пары 5 выходного звена 2, то вращательные пары 6 (фпг.1, 3, 4, 6 и 7) расположены от центра на расстоянии Ix, Iv, Iz.
0Отношение этих расстояний к длине соответствующего рычага 7 обуславливает передаточное отношение, т.е. отношение перемещения точки, с которой непосредственно связан привод 3, и точки центра сфе5 рического шарнира 5 выходного звена 2.
Кинематическая цепь (фиг.4) может быть с тремя рычагами, длина которых равна гх , гу , rz . Индекс обозначает вокруг какой оси происходит вращение при воздействии на данный рычаг.
Например, при воздействии привода на рычаг длиной гх точка А перемещается на расстояние, равное ev х по оси Z (фиг.6). При этом рх равно уэх Л Iz/rx . где Л г - перемещение точки крепления привода, параллельного оси Z. Аналогичные соотношения имеют место при микроперемещениях точек крепления других приводов(фиг.4 и 6). а также и в других случаях расположения приводов и рычагов для механизмов со скрещивающимся расположением осей (фиг.1, 3, 4, 6 и 7). Во всех этих случаях передаточное отношение определяется по правилу рычага.
Для механизма с компланарным расположением осей вращательных пар (фиг.2, 5 и 7) имеет место аналогичная ситуация, однако два привода должны иметь плечо относительно соответствующей оси вращательной пары, параллельной оси Z (фиг.5). В частности, при микроперемещении точки крепления горизонтального привода, имеющего рычаг длиной rz , перемещение точки А по оси YI определяется отношением длин ех и rz. Перемещение точки А по координатам Xi и 2i аналогично предыдущему случают характеризуется произведениями соответственно Y (pi и IY рк , где рх и pi - произведения длины соответствующего рычага на перемещение точки крепления привода.
Механизмы (фиг. 1-5) могут быть построены таким образом, что каждый привод 3 перемещает точку центра сферической пары 5 выходного звена 2 по одной координате, в частности привод 3 (фиг.4), связанный с рычагом 7, имеющим длину гх , перемещает точку А по оси Zi, привод 3, связанный с рычагом длиной г/ , перемещает точку А по оси Xi. а привод, связанный с рычагом длиной rz , перемещает точку А по оси YI, чем достигается упрощение управления и повышение быстродействия (имеются ввиду микроперемещения, при которых можно пренебречь изменением положения приводов).
Кинематические пары 4-6 выполнены в виде перемычек пониженной жесткости прямоугольного (8, 10, 11, 14) и кругового (9, 12, 13) поперечного сечения, что повышает. точность в сравнении с выполнением пар в виде сопряжения, охватывающего и охватываемого элементов.
Механизм работает следующим образом. .
Каждый привод 3, воздействуя на рычаг 7, через кинематические пары 4 (12-14) перемещает точку выходного звена 2, совпадающую с центром сферической пары 5(9,
10) по одной координате, поворачивая ее вокруг оси одной из пар 6 (8. 11).
При этом, если механизм в одной кинематической цепи содержит три привода, в 5 другой - два, в третьей - один привод (фиг.1 и 2), то три привода, принадлежащие одной кинематической цепи, определяют положение точки центра сферической пэры 5 этой цепи. Остальные приводы определяют ори0 ентациювыходного звена 2.
Каждая кинематическая цепь может содержать по два привода, при этом каждый привод определяет положение и ориентацию выходного звена.
5Если приводы одностороннего действия (фиг. 10). то перемещение выходного звена 2 по любой координате осуществляется несколькими приводами. В частности, вращение вокруг оси рычага 7 (фиг.11) зэда0 ется действием четырех приводов 15. Действием четырех приводов 15 задается движение по вертикали и горизонтали точки Е. Действием трех приводов 15 (фиг.12) определяется плоское перемещение точки F, а
5 на фиг.13 два привода 15 определяют вертикальное перемещение точки G.
Применение предлагаемого механизма позволяет достичь следующих технико-экономических преимуществ. Выполнение
0 кинематических цепей с рычагом 7 и вращательными парами 6 позволяет получить некоторое передаточное отношение между перемещением точки крепления приводов и перемещением соответствующей точки вы5 ходного звена. Тем самым, при использовании, например, пьезоприводов с постоянной дискретностью за счет указанного передаточного отношения уменьшается дискретность микроперемещений
0 выходного звена, а значит, повышается точность работы механизма, что повышает технологические возможности при использовании одинаковых приводов.
Если не требуется одинаковая с прототи5 пом точность микроперемещения, то достаточны приводы с большей дискретностью, т.е. менее дорогие.
Кроме того,наличие указанного передаточного отношения повышает грузоподьем0 ность и жесткость механизма, поскольку для уравновешивания силового воздействия на выходное звено необходимы меньшие усилия, т.е; повышаются функциональные возможности.
5Компланарное либо скрещивающее размещение осей вращательных пар, а также наличие рычага позволяет таким образом построить управление, что каждый привод управляет перемещением соответствующей точки выходного звена по одной
координате, тем самым упрощается управление, повышается быстродействие и расширяются функциональные возможности.
Выполнение кинематических пар 4-6 в виде перемычек пониженной жесткости позволяет избежать использования пар трения, что важно, например, при работе в вакууме (электронная промышленность).
Формула изобретения
1. Пространственный механизм с шестью степенями свободы, включающий основание, соединенные с ним посредством сферических пар приводы и кинематические цепи, связывающие приводы с выходным звеном посредством соответствующей сферической пары выходного звена, отличающийся тем, что, с целью расширения технологических возможностей за счет повышения точности перемещения выходного звена и повышения быстродействия, каждая кинематическая цепь содержит как минимум один рычаг, который кинематически связан с основанием, с выходным звеном, а также как минимум с одним приводом, и три последовательно расположенные вращательные пары, причем центр сферической пары выходного звена расположен вне осей вращательных пар, а каждый рычаг связан с основанием как минимум одной вращательной парой.
2. Механизм по п. г, отличающий- с я тем. что три последовательно расположенные вращательные пары установлены с ортогонально-скрещивающимся размещением осей.
3. Механизм по п.1,отличаю щий- с я тем, что три последовательно расположенные вращательные пары установлены с компланарно размещенными осями, две из которых ортогональны третьей.
4. Механизм поп.1,отличающий- с я тем, что кинематические цепи выполнены в виде единого элемента, содержащего
перемычки пониженной жесткости, при этом вращательные пары выполнены в виде перемычек прямоугольного поперечного сечения, а сферическая пара выходного звена
выполнена в виде совокупности двух перемычек кругового поперечного сечения и прямоугольного поперечного сечения, причем центр перемычки кругового сечения расположен на продолжении оси перемычки прямоугольного сечения.
5. Механизм по п.1, о т л и ч а ю щ и и - с я тем, что одна вращательная пара выполнена в виде совокупности двух сопряженных перемычек, размещенных симметрично относительно центра сферической пары.
6. Механизм по п.1, о т л и ч а ю щ и и - с я тем, что приводы соединены с рычагом и с основанием одной двухподвижной сферической парой, выполненной в виде перемычки кругового сечения, и одной трехподвижной сферической парой, выполненной в виде совокупности перемычки прямоугольного поперечного сечения и перемычки кругового поперечного сечения,
центр которой расположен на продолжении оси перемычки прямоугольного сечения.
7. Механизм поп.1,отличающнй- с я тем, что одна кинематическая цепь содержит три привода, вторая - два, и третья - один привод.
8. Механизм по п.1, о т л и ч а ю щ и и - с я тем, что каждая кинематическая цепь содержит два привода.
9. Механизм по пп.1 и 2, отличаю- щийся тем. что одна кинематическая цепь содержит четыре привода одностороннего действия, вторая - три привода одностороннего действия и третья - два привода одностороннего действия.
Ю. Механизм по пп.1 и 2, отличающий с я тем, что каждая кинематическая цепь содержит три привода одностороннего действия.
7
&/2.J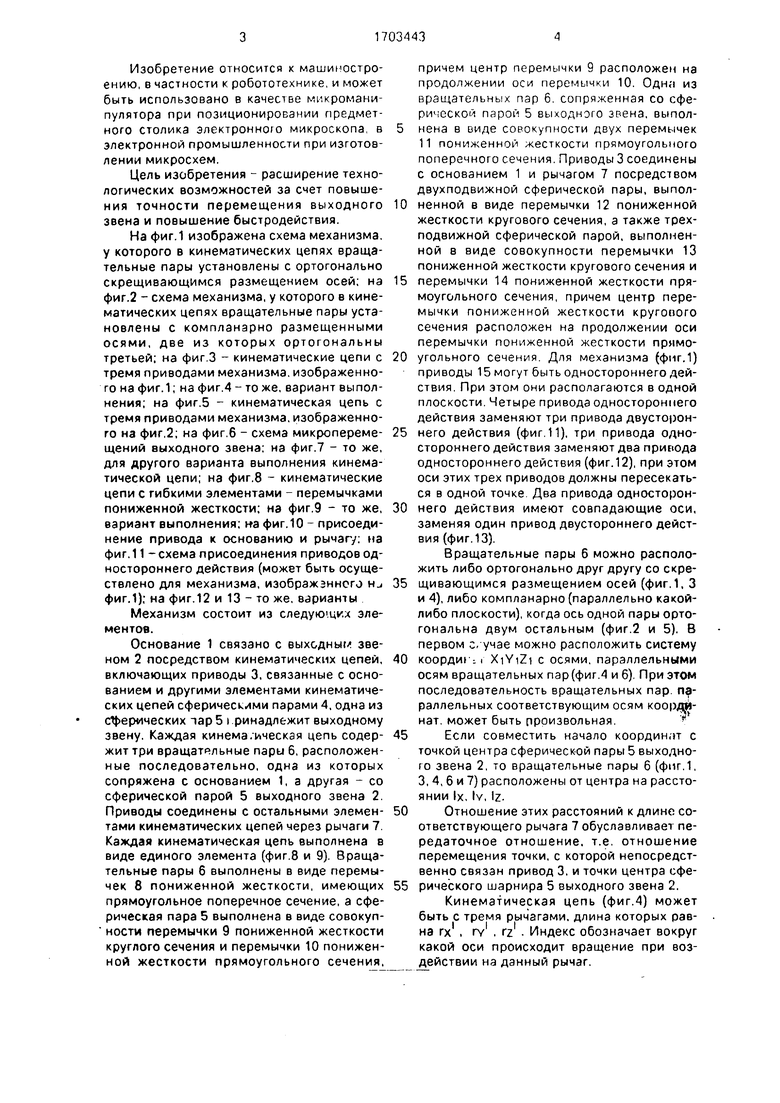
| название | год | авторы | номер документа |
|---|---|---|---|
| Плоский механизм | 1991 |
|
SU1779575A1 |
| Упругий шарнир | 1990 |
|
SU1751488A1 |
| Пространственный механизм | 1991 |
|
SU1779576A1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| Пространственный механизм | 1990 |
|
SU1726233A1 |
| Пространственный механизм | 1990 |
|
SU1726232A1 |
| Юстировочное устройство | 1990 |
|
SU1760515A1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в качестве микроманипулятора при позиционировании предметного столика электронного микроскопа, в электронной промышленности при изготовлении микросхем. Целью изобретения является расширение технологических возможностей за счет повышения точности перемещения выходного звена и повышения быстродействия. Перемещение выходного звена 2 производится посредством приводов 3 через кинематические цепи с рычагами 7 и вращательными парами 6, что позволяет получить некоторое передаточное отношение между перемещением точки крепления приводов и перемещением соответствующей точки выходного звена. 9 з.п. ф-лы. 13 ил. Ј VI О со fc со 
Риг.5
8
W(b
,-
CfrfCOZ.1
dffd
9 гп к.
10
Фш.З
Фиг. ТО
15
V
Сй
fuz. 12
te //
| @ -Координатный пространственный механизм (его варианты) | 1984 |
|
SU1222538A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
