Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляторам параллельной структуры, содержащим подвижную платформу с рабочим органом для применения в автоматических линиях, обрабатывающих центрах и хирургии.
Известен платформенный сферический манипулятор с тремя степенями свободы, содержащий подвижную треугольную платформу, вершины которой соединены с опорным основанием через три шарнирно-сочлененные двухзвенные кинематические цепи и образуют между собой податливые 6-сторонние замкнутые контуры с приводом от трех вращательных двигателей (Cartesian parallel manipulators. United States Patent No. 6,729,202 B2.2004) - аналог.
Недостатками известного манипулятора являются:
1. Сложная конструкция механизма параллельной структуры из 8 подвижных звеньев и трех вращательных приводных двигателей
2. Высокая трудоемкость изготовления и сборки
3. Низкая жесткость и точность позиционирования из-за большого числа податливых подвижных сочленений звеньев в 6-сторонних замкнутых контурах каждой из трех опорных кинематических цепей
Наиболее близким по технической сущности и достигаемому эффекту, к предлагаемому изобретению является платформенный манипулятор с тремя степенями свободы, содержащий опорное основание и подвижную треугольную платформу с устройством ее привода, вершины которой соединены с тремя стержневыми подвижными опорами через установленные на каждой из вершин треугольника три трехподвижных сферических шарнира, а сами стержневые подвижные опоры выполнены в виде многозвенных кинематических цепей с множеством вращательных кинематических пар, образующих 6-сторонние податливые замкнутые контуры (схема платформенного манипулятора с тремя степенями свободы в статье Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)». Вестник Сибирского государственного аэрокосмического университета. 2012. Выпуск 4. С. 46-50. Рис. 1) - прототип.
Недостатками указанного платформенного манипулятора являются:
1. Сложная многозвенная конструкция и высокая трудоемкость изготовления и сборки, особенно трех сложных сферических шарниров (традиционно применяемых и неподвижно закрепляемых на всех трех вершинах треугольной подвижной платформы - из-за необходимости выполнения внутренней и внешней сферических поверхностей шарнира с точным пересечением строго в одной точке всех трех осей вращения (United States Patent No. 4,628,765.1986).
2. Низкая жесткость и точность позиционирования, а также ограниченная нагрузочная способность из-за выполнения замкнутой цепи манипулятора с податливыми под рабочей нагрузкой 6-сторонними шарнирными замкнутыми контурами звеньев
3. Ограниченная узким конусом рабочая зона дельта-механизма манипулятора (рис. 4 в указанной статье: Мирзаев Р.А., Смирнов Н.А.) это ограничение рабочего пространства манипулятора возникает из-за возможности заклинивания многочисленных вращательных кинематических пар звеньев при возникающих в них больших углах давления
4. Большие габариты из-за применения трех электромагнитных приводов подвижных опор.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции манипулятора, повышении его жесткости и точности позиционирования, а также в расширении его рабочей зоны обслуживания и снижения его габаритов.
Получение технического результата достигается за счет того, что предлагаемый платформенный VIP-манипулятор содержит опорное основание и подвижную платформу с устройством ее привода, выполненную в виде кругового сектора, со сторонами которого подвижно соединены три стержневые опоры в виде отдельного двупарного звена с различным сочетанием на нем одной вращательной, двух цилиндрических и одной сферической кинематических пар, из которых сферический шарнир подвижно установлен на круговой направляющей подвижной платформы.
Сущность изобретения поясняется чертежами на фиг. 1 и фиг. 2. На фиг. 1 изображен общий вид платформенного VIP-манипулятора с тремя степенями свободы, содержащего опорное основание 1 и подвижную платформу 2 с устройством ее привода. Подвижная платформа 2 выполнена в виде кругового сектора ABC, ограниченного дугой окружности ВС и двумя радиусами АС и АВ, проведенными к концам этой дуги. Со сторонами АВ, АС и ВС кругового сектора ABC платформы 2 подвижно соединены три стержневые подвижные опоры 3, 4 и 5, каждая из которых выполнена в виде отдельного опорного двупарного звена, у которых:
а) стержневая опора 3 выполнена в виде двупарного звена с сочетанием одноподвижной вращательной кинематической пары O1 и двухподвижной цилиндрической кинематической пары O2;
б) стержневая опора 4 выполнена в виде двупарного звена с сочетанием двух цилиндрических кинематических пар с непараллельными между собой осями вращательного движения каждой пары O3 и O4;
в) стержневая опора 5 выполнена в виде двупарного звена с сочетанием двухподвижной цилиндрической кинематической пары O5 и трехподвижного сферического шарнира O6.
Устройство привода подвижной платформы 2 выполнено с одной приводной вращательной кинематической парой O1 от отдельного вращательного привода с поворотным двигателем (на фиг. 1 не показан) и двумя приводными цилиндрическими кинематическими парами O4 и O5, выполненными в виде установленных на опорном основании 1 двух линейных двигателей, например, в виде гидроприводов 6 и 7.
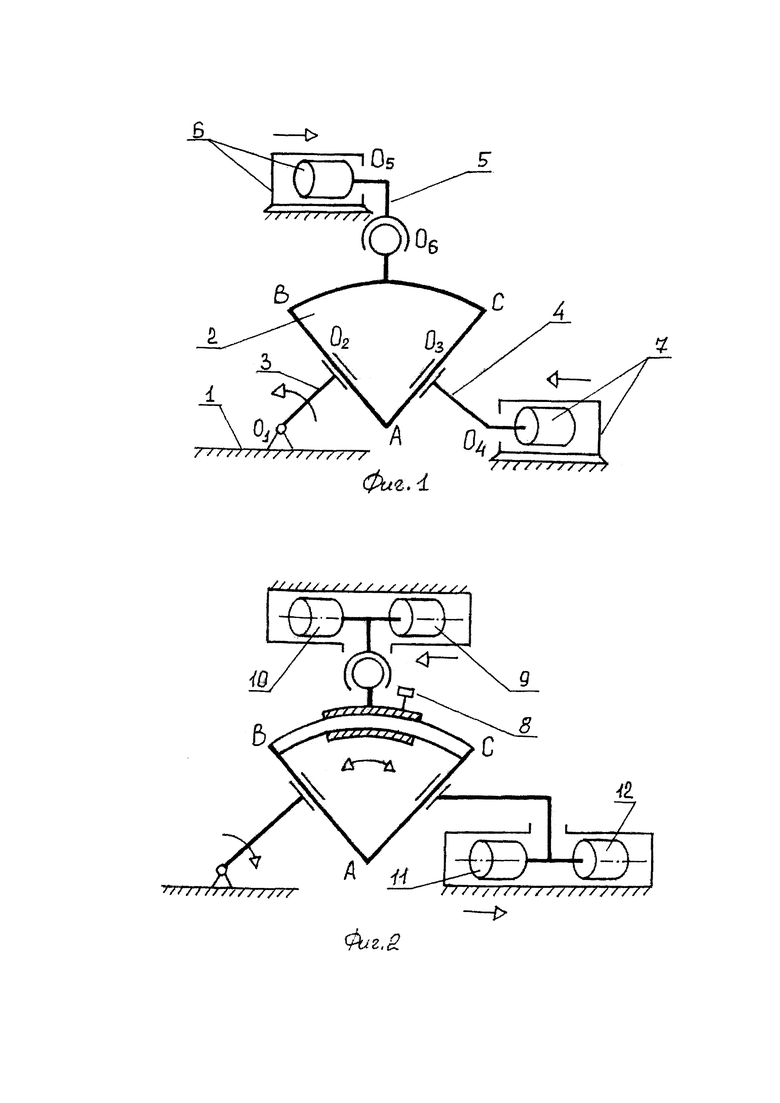
На фиг. 2 изображен вариант выполнения платформенного VIP-манипулятора, в котором:
1) Криволинейный участок ВС кругового сектора ABC подвижной платформы 2 выполнен в виде круговой направляющей, а сферический шарнир O6 установлен на этой круговой направляющей с возможностью установочного углового перемещения относительно точки А и последующей фиксации относительно круговой направляющей, например, посредством фиксатора 8;
2) Гидроприводы 6 и 7 выполнены с попарно соединенными и соосно расположенными между собой поршнями 9 и 10, а также 11 и 12, что предотвращает их перекос и заклинивание в гидроприводе при нагружении манипулятора.
Работа представленного платформенного VIP-манипулятора заключается в следующем.
При угловом повороте опорного двупарного звена 3 и подаче рабочей жидкости в установленные на опорном основании 2 гидроприводы 6 и 7 (фиг. 1) происходит требуемое перемещение подвижной платформы 2 (с закрепленным на ней исполнительным органом) в рабочем пространстве движений с тремя степенями свободы, которое расширяется за счет установочного регулировочного перемещения сферического шарнира O6 по круговой направляющей ВС подвижной платформы 2 (фиг. 2) с его последующей фиксацией относительно круговой направляющей ВС посредством фиксатора 8.
Достигаемый в предлагаемом платформенном VIP-манипуляторе с тремя степенями свободы положительный эффект заключается в следующем:
1. Упрощается конструкция и снижаются габариты платформенного манипулятора с тремя степенями свободы за счет его выполнения с предельно уменьшенным до пяти  общим числом звеньев данного пространственного механизма и применением для их соединения только одного сферического шарнира (вместо традиционно устанавливаемых трех и более сложных сферических шарниров, например, по US Patent No. 4,628,765).
общим числом звеньев данного пространственного механизма и применением для их соединения только одного сферического шарнира (вместо традиционно устанавливаемых трех и более сложных сферических шарниров, например, по US Patent No. 4,628,765).
2. Повышается жесткость, точность позиционирования и нагрузочная способность манипулятора за счет замыкания его звеньев в четырехсторонние жесткие замкнутые контуры звеньев с уменьшенным числом их податливых подвижных сочленений.
3. Обеспечивается увеличение рабочей зоны обслуживания на выходе манипулятора за счет подвижной установки сферического шарнира на круговой направляющей подвижной платформы в форме кругового сектора, что расширяет пространство работы манипулятора без вредных особых положений (singularity) за счет установочного углового перемещения сферического шарнира O6 относительно точки А кругового сектора ABC подвижной платформы 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в пространственных манипуляторах параллельной структуры, применяемых в автоматических линиях, отрабатывающих центрах и хирургии. Манипулятор содержит подвижную платформу и опорное основание. Платформа выполнена в виде кругового сектора, со сторонами которого подвижно соединены три стержневые подвижные опоры. Каждая опора выполнена в виде опорного двупарного звена. Первое звено выполнено с одноподвижной вращательной и двухподвижной цилиндрической кинематическими парами. Второе звено имеет две двухподвижные цилиндрические кинематические пары с непараллельными осями вращения. Третье звено выполнено с двухподвижной цилиндрической кинематической парой и трехподвижным сферическим шарниром. В результате обеспечивается упрощение конструкции и снижение габаритов манипулятора, повышение его жесткости и точности позиционирования, увеличение рабочего пространства. 3 з.п. ф-лы, 2 ил.
1. Платформенный манипулятор с тремя степенями свободы, содержащий подвижную платформу с устройством ее привода и опорное основание, которые соединены между собой посредством трех стержневых подвижных опор, отличающийся тем, что подвижная платформа выполнена в виде кругового сектора, со сторонами которого подвижно соединены три стержневые подвижные опоры, каждая из которых выполнена в виде отдельного опорного двупарного звена, при этом первое опорное двупарное звено выполнено с одноподвижной вращательной кинематической парой и двухподвижной цилиндрической кинематической парой, второе опорное двупарное звено выполнено с двумя двухподвижными цилиндрическими кинематическими парами с непараллельными осями вращения, а третье опорное двупарное звено выполнено с двухподвижной цилиндрической кинематической парой и трехподвижным сферическим шарниром.
2. Манипулятор по п. 1, отличающийся тем, что устройство привода подвижной платформы выполнено с одной приводной вращательной кинематической парой от поворотного двигателя и двумя приводными цилиндрическими кинематическими парами, выполненными в виде установленных на опорном основании двух линейных двигателей, например в виде гидроприводов.
3. Манипулятор по п. 1, отличающийся тем, что криволинейный участок кругового сектора подвижной платформы выполнен в виде круговой направляющей, а сферический шарнир установлен на этой круговой направляющей с возможностью установочного углового перемещения и последующей фиксации, например посредством фиксатора.
4. Манипулятор по п. 2, отличающийся тем, что гидроприводы выполнены с попарно соединенными и соосно расположенными поршнями, установленными по разные стороны от присоединяемого к ним опорного двупарного звена манипулятора.
| МИРЗАЕВ Р.А., СМИРНОВ Н.А | |||
| Исследование кинематики манипулятора параллельной структуры (дельта-механизм) | |||
| Вестник Сибирского государственного аэрокосмического университета, 2012, выпуск 4, с.46-50, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пресс для оттяжки и заутюжки стойки подворотника мужского пальто | 1960 |
|
SU133043A1 |
| Круговая делительная машина | 1956 |
|
SU115708A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534675C1 |
| US 4976582 A1, 11.12.1990 | |||
| US 7367772 B2, 06.05.2008. | |||

