2.L-координатный пространственный механизм, содержащий два фланца
и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в трех точках, в одной из которых размещены центры шарниров, в другой - центры двух-у-а в третьей точке размещен центр одного шарнира, при этом центры шарниров другого фланца размещены в четырех точках, в одной из которых размещены центры трех шарниров.
3.L-координатный пространственный механизм, содержащий два фланца и вьтолненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающий- с я тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного из фланцев расположены в трех точках, в одной из которых размещены центры трех шарниров, в другой - двух, а в третьей размещен центр одного шарнира, причем центры шарниров другого фланца расположены
в четырех точках, в двух из которых размещено по два центра шарниров.
4.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответст- вуняцих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения техноло гических возможностей за счет улучше ния кинематических и динамических параметров механизма, центры шарниров одного фпанца расположены в трех точках, в каждой из которых размещено по два центра шарниров, а центры шарниров другого фланца расположены
в четырех точках, в одной из которых размещены центры трех шарниров.
5.L-координатный пространственный механизм, содержащий два фланца
и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в трех точках, в каждой из которых размещено по два центра шарниров, а центры шарниров другого фланца расположены в четырех точках, в двух из которых размещено по два центра шарниров.
6.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами отличающийся тем, что,
с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в трех точках, в одной из которых размещены центры трех шарниров, в другой - центры дву а в третьей размещен центр одного шарнира, при этом центры шарниров другого фпанца расположены в пяти точках, в одной из которых размещены центры двух шарниров.
7.L-координатный пространственный механизм, содержащий два фпанца и выполненные с возможностью регулирования длин посредством соответ- ствуняцих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающий- с я тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в трех точках, в каждой из которых размещено по два центра шарниров, а центры шарниров другого фпанца расположены в пяти точках, в одной из которых размещены центры двух шарниров.
8.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарни
pai№ с фланцами, отличающий с я тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в трех точках, в одной из которых размещены центры трех шарниров, в другой - центры двух, а в третьей размещен центр одного шарнира, при этом центры шарниров другого фланца размещены в шести точках,
9.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответст- вукицих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающий- с я тем, что, с целью расширения технологических возможностей за сче улучшения кинематических и динамических параметров механизма, центры шарниров накаждом из фланцев расположены в четырех точках,в одной из которых размещены центры трех шарниров.
10.1-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы ко торых связаны сферическими шарнирами с фланцами, отличающий с я тем, что, с целью расширения технологических возможностей за счёт улучшения кинематических и динамических параметров механизма, центры шарниров каждого из фланцев расположены в четырех точках, при этом на одном фланце в одной точке размещены центры трех шарниров, а на другом в двух точках размещено по два центра шарниров.
11.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающий- с я тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров каждого из фланцев расположены в четырех точках, в двух из которых размещено по два центра шарниров.
12.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длчн посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в четьфех точках, в одной из которых размещены центры трех шарниров, а центры шарниров другого фланца расположены в пяти точках, в одной из которых размещены центры двух шарниров.
13.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических па раметров механизма, центры шарниров одного фланца расположены в четырех точках, в двух из которых размещено по два центра шарниров, а центры шарниров другого фланца расположены в пяти точках, в одной из которых размещены центры двух шарниров.
14.L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регули,рования длин посредством соответст- вующих приводов шесть тяг, концы ко- торых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в четырех точках, в одной из которых размещены центры трех шарниров, а центры шарниров другого фланца размещены в шести точках.
15. L-координатный пространственный механизм, содержащий два франца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающий- с я тем, что, с целью расширения
технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в четырех точках, в двух из которых размещено по.два центра шарниров, а центры шарниров другого фланца размещены в шести точках.
16. L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых свя заны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улуч шения кинематических и динамических параметров Механизма, центры шарниИзобретение относится к машиностроению и может быть использовано, например, в роботостроении.
Целью изобретения является расширение технологических возможностей за счет улучшения кииематических и динамических параметров механизма.
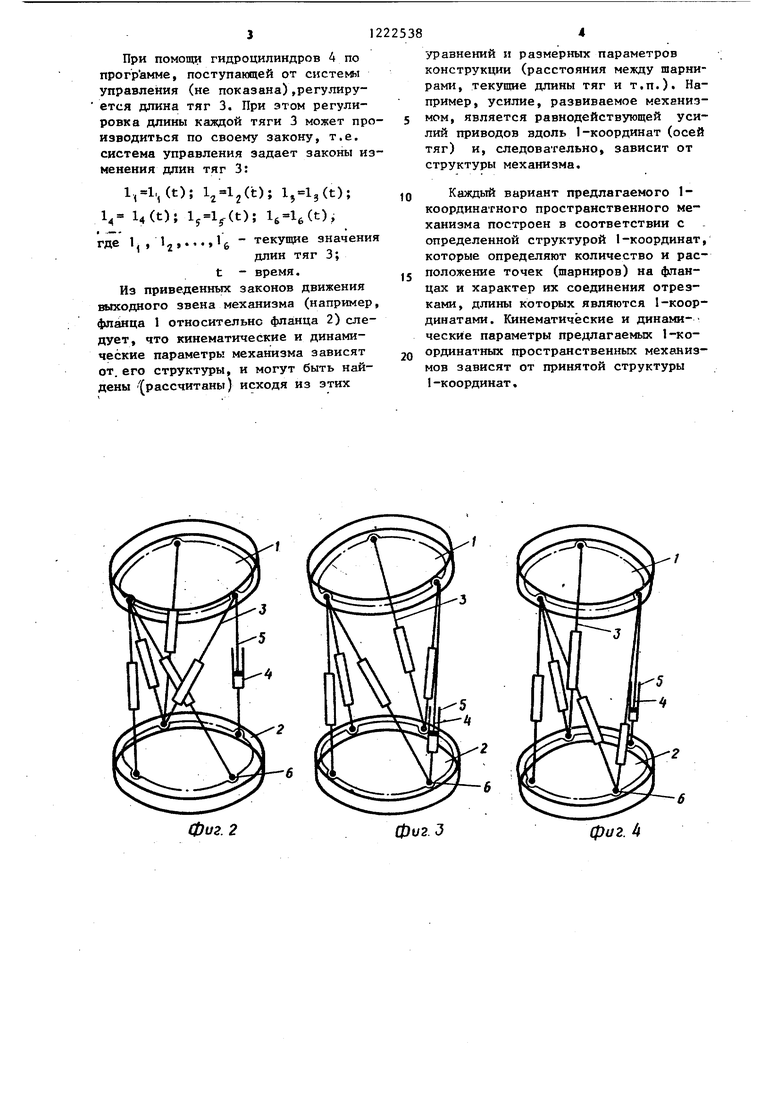
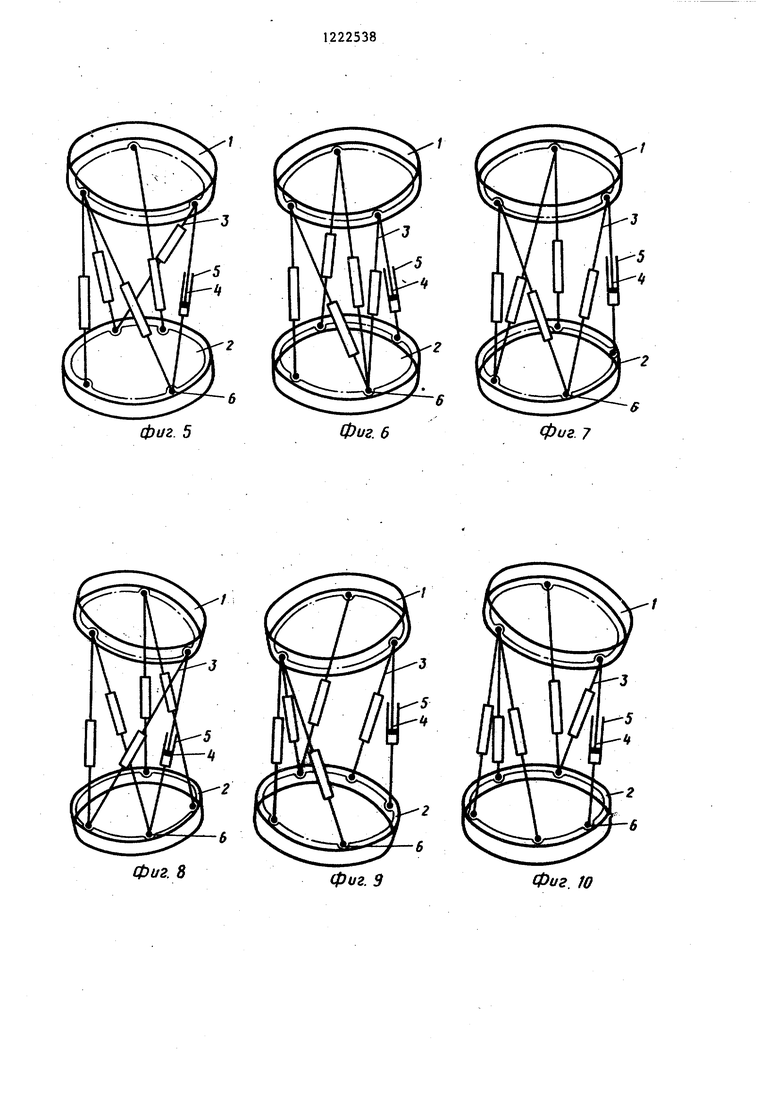
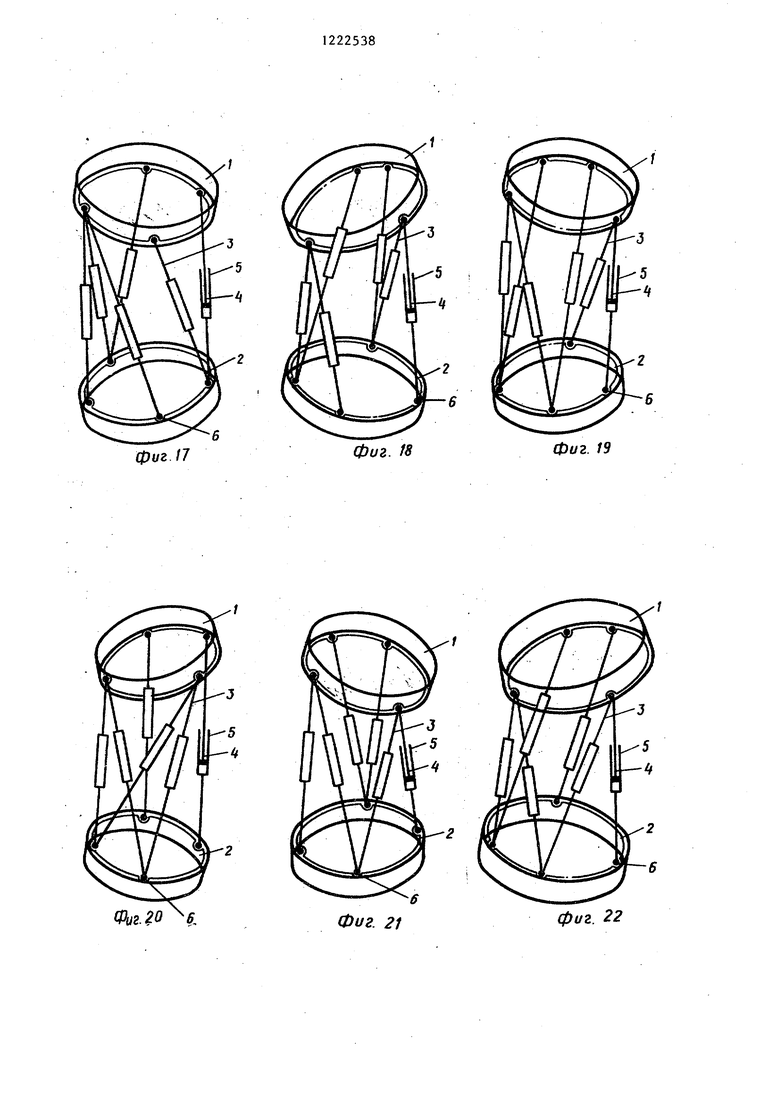
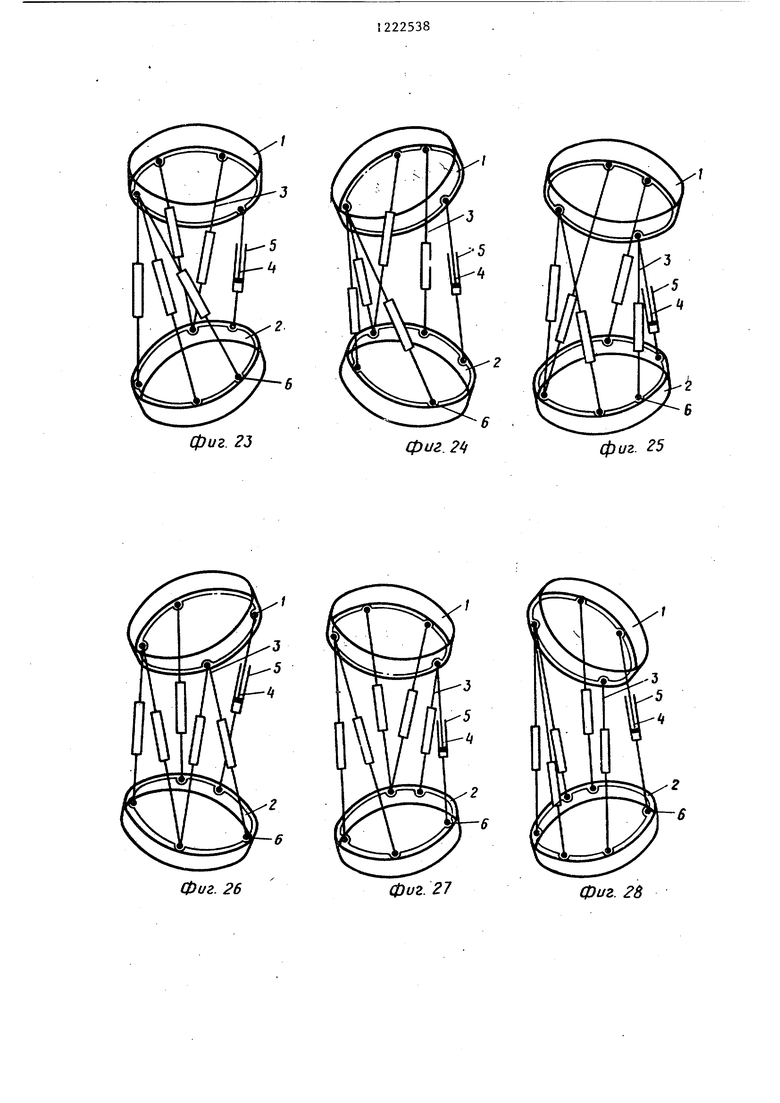
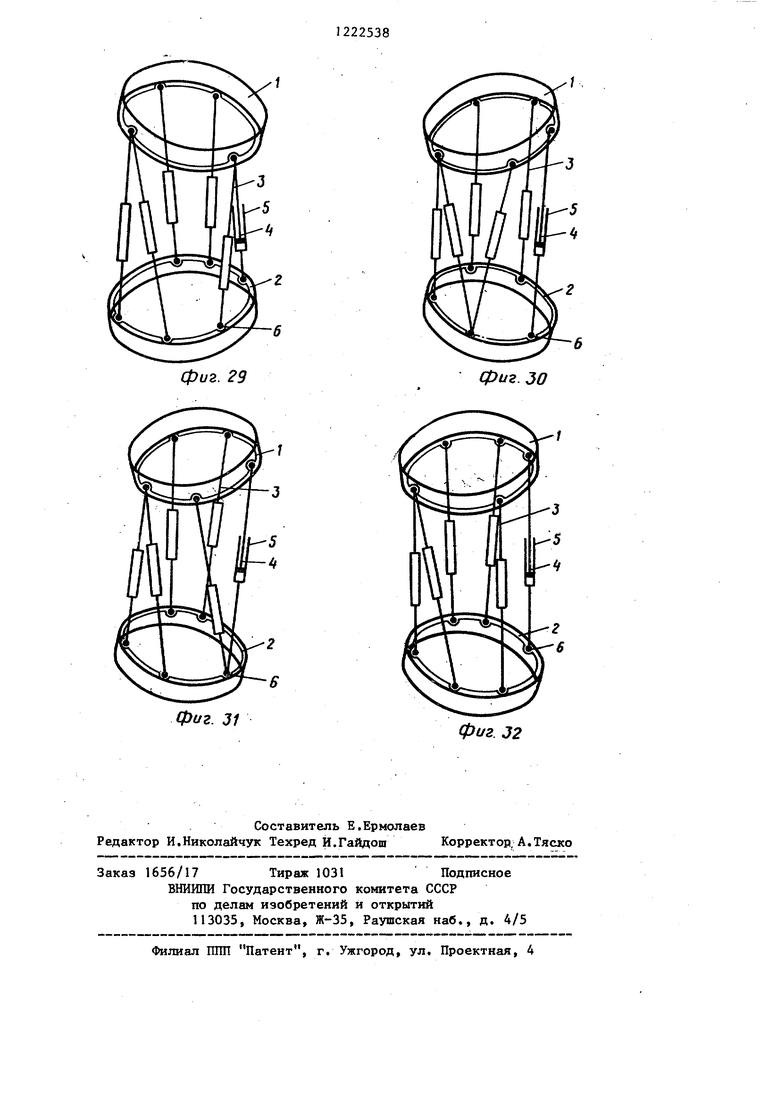
На фиг.1 изображена схема L-коор- динатного пространственного механиз- ма, вариант 1; на - то же, ваиант 2; на фиг.3-5 - то же, вариант 3; на фиг.6 - то же,вариант 4; на
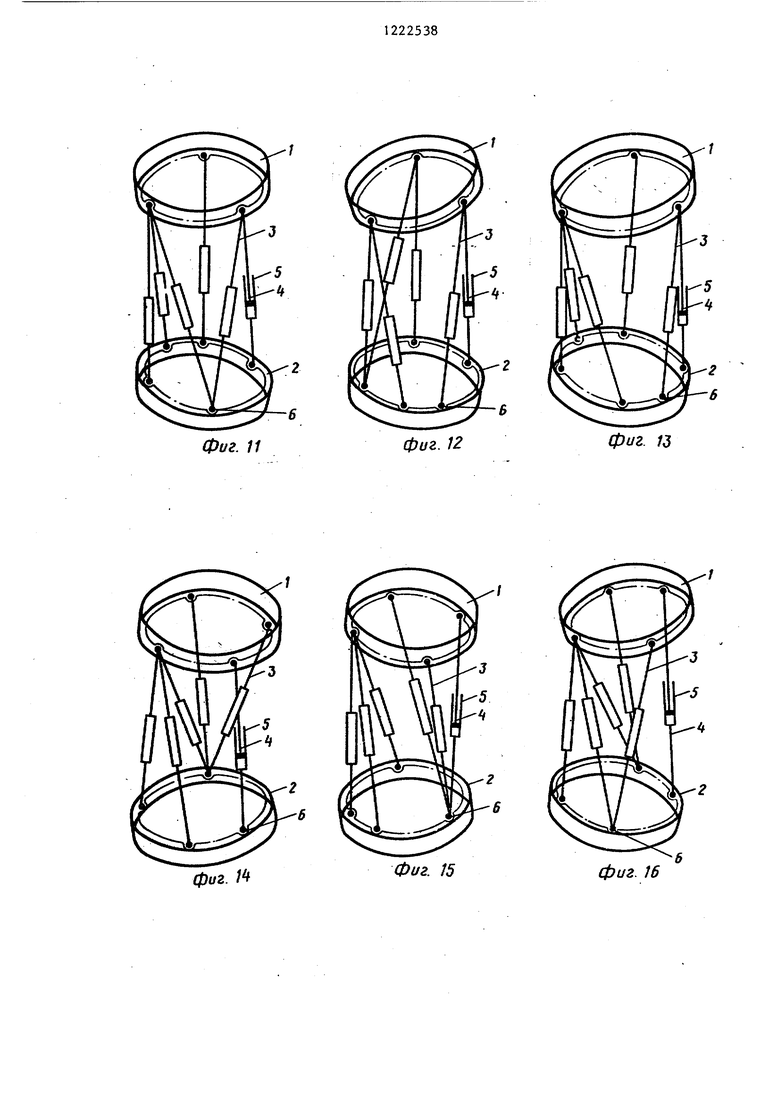
ИГ.7 ив- то же, вариант 5; на иг.9-11 - то же, вариант 6; на фиг. 12 - то же, вариант 7; нафиг.13- то же, вариант 8; на фнг.14 и 15 - то же, вариант 9; на фиг.16 и 17 - то же, вариант 10; на фиг.Г8-22 - то же, вариант 11; на фиг.23 и 24 - то же, вариант 12; на фиг.25-27-то же, вариант 13; на фиг.28 - то же, вариант 14; на фиг.29 - то же, вари - ант 15; на фиг.30 и 31 - то же, вариант 16; на фиг.32 - то же, вариант 17,
L-координатный пространственный механизм содержит флан1№1 1 и 2 и шесть тяг 3, длины которых регули- руются приводами, например пневмо- или гидроцилиндрами 4. Поршни 5 гидров каждого из фланцев расположены в пяти точках, в одной из которых размещены центры двзгх шарниров.
17. L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соответствующих приводов шесть тяг, концы которых связаны сферическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров одного фланца расположены в пяти точках, в одной из которых размещены центры двух шарниров, а центры шарниров другого фланца расположены в шести точках.
5
0
5
роцилиндров 4 связаны с точками фланца 1 посредством сферических шарниров 6, а гидроцилиндры 4 таким же образом - с фланцем 2. Тяги 3 и фланцы 1 и 2 при данных (текущих) значениях длин тяг образуют геометри чески неизменяемую структуру, а совокупность длин тяг 3 и их расположение однозначно характеризуют взаимное расположение фланцев 1 и 2, причем ни одна из этих тяг не может быть изъята без нарушения работоспособности механизма.
Общие условия работоспособности, т.е. обеспечения геометрической неизменяемости конструкции при данных значениях длин тяг, всех рассматриваемых вариантов механизма следующие: число шарниров на фланцах должно быть не менее трех, и они не должны лежать на одной прямой. При этом недопустимо наличие прямой, пересекающей все шесть тяг. При каждом возможном относительном положении фланцев образуется как бы пространственная ферма.
L-координатный пространственный механизм работает следукщим образом (фиг.1).
При помощи гидроцилиндров 4 по прогр амме, поступающей от системы управления (не показана),регулиру- ется длина тяг 3. При этом регулировка длины каждой тяги 3 может производиться по своему закону, т.е. система управления задает законы изменения длин тяг 3:
1,,,, (t); (t); l,l3(t); 14 14 (t); (t); (ь),
где 1, , Ixj 6 значения
длин тяг 3; t - время.
Из приведенных законов движения выходного звена механизма (например, фланца 1 относительно фланца 2) следует, что кинематические и динамические параметры механизма зависят от. его структуры, и могут быть найдены (рассчитаны) исходя из зтих
уравнений и размерных параметров конструкции (расстояния между шарнирами, текущие длины тяг и т.п.). Например, усилие, развиваемое механизмом, является равнодействующей усилий приводов вдоль 1-координат (осей тяг) и, следовательно, зависит от структуры механизма.
Каждый вариант предлагаемого 1- координатного пространственного механизма построен в соответствии с определенной структурой I-координат, которые определяют количество и расположение точек (шарниров) на фланцах и характер их соединения отрезками, длины которых являются 1-координатами. Кинематические и динами- ческие параметры предлагаемых 1-координатных пространственных механизмов зависят от принятой структуры -координат.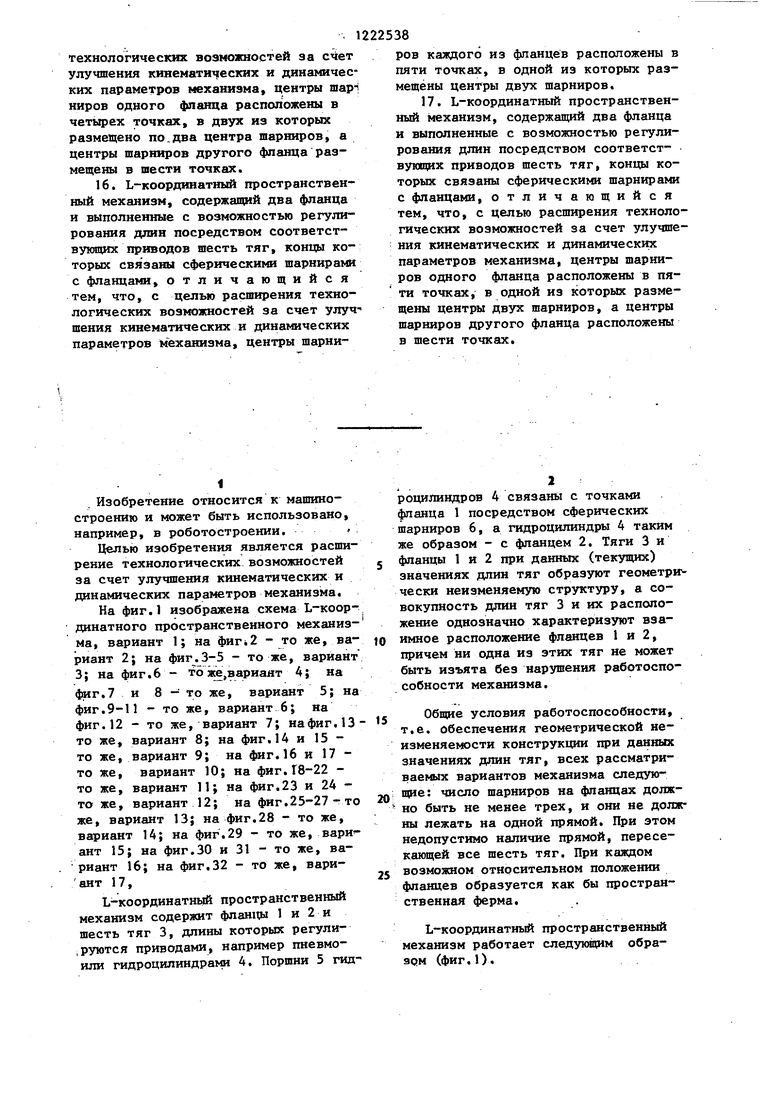
| название | год | авторы | номер документа |
|---|---|---|---|
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| Способ и устройство для испытания стрелкового оружия и/или стендовых испытаний ракетных двигателей | 2023 |
|
RU2799168C1 |
| Манипулятор модульного типа | 1982 |
|
SU1174256A1 |
| Пространственный механизм | 1990 |
|
SU1764987A1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1441123A1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2028927C1 |
| @ -Координатный пространственный механизм | 1985 |
|
SU1303398A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "НОРМАС" N 34 | 2019 |
|
RU2720526C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 1992 |
|
RU2008198C1 |
1. L-координатный пространственный механизм, содержащий два фланца и выполненные с возможностью регулирования длин посредством соот- ветствукмцих приводов шесть тяг, концы которых связаны сд)ерическими шарнирами с фланцами, отличающийся тем, что, с целью расширения технологических возможностей за счет улучшения кинематических и динамических параметров механизма, центры шарниров на каяодом фланце расположены в трех точках, причем на одном фланце в одной точке размещены центры трех шарниров, в другой- центры двух, а в третьей размещен центр одного шарнира, при этом на другом фланце в каждой из трех точек размещены центры двух шарниров. (Л ю ISD ел OQ 00 фиг. 1
фиг. 2
фи2. J
фиг. 4
фиг. 5
фиг. 6
фиг 7
фиг. 8
фиг. 9
фиг. W
фиг. 11
фиг. J2
фиг. 7J
фиг. /
5
Фаг. 15
фиг. 16
фиг 17
фиг. 18
фиг. IS
Фиг. го
Фиг. 21
фиг. 22
фиг. 2J
фиг. 2
фиг. 25
фиг. 26
фиг. 27
фиг. 2в
фи2. 29
фиг. до
фиг. 31
фиг. 32
Составитель Б.Ермолаев Редактор И.Николайчук Техред И.Гайдош Корректор, А,Тяско
Заказ 1656/17 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
| Манипулятор модульного типа | 1982 |
|
SU1174256A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
