Изобретение относится к медицинской технике, применяемой в нейрохирургии, невропатологии и ортопедии, и может быть использовано в лечебных учреждениях для обучения ходьбе больных.
Известно устройство для обучения ходьбе больного, содержащее каркас на колесах с верхней и нижней дугообразными рамами и злементы поддержки больного в виде опор.
Однако зто устройство не может быть использовано больными с парализованными нижними конечностями на ранних стадиях лечения.
Известно также устройство для обучения ходьбе больного, которое включает каркас на колесах с верхней и нижней
дугообразными рамами, подмышечные опоры и поворотные рычаги.
Однако известное устройство не может быть использовано больным при параличе трех конечностей, т.е. рука и 2 ноги, и при параличе одной половины тела с неподвижностью, например, левой руки и левой ноги, правой руки и правой ноги, больному необходимо держаться двумя руками за опоры устройства и усилием рук непрерывно двигать устройство вперед. При этом известное устройство не обеспечивает в целом физиолОгичности движений в конечностях и не обладает тренирующими свойствами для мускулатуры конечностей.
Цель изобретения - обеспечение возможности передвижения больных с отсутствием активных движений ног и одной руки.
Указанная цель достигается тем, что в известном устройстве для передвижения больных, содержащем каркас, включающий верхнюю и нижнюю дугообразные рамы со стойками, подмышечные опоры, поворотные катки и рычажный механизм передвижения с ножными толкателями, рычажный механизм передвижения выполнен в виде левого и правого ручных рычагов, каждый из которых соединен через подшипники с ножными толкателйми, причем левый и правый ручные рычаги связаны между собой прЕ4 помощи двух стержней, жестко закрепленных на горизонтальной оси, и двух тяг, одна из которых закреплена на ручном рцчаге ниже подшипника, а другая - выше подшипника, а на верхней дугообразной раме каркаса установлен пояс безопасности.
На фиг. 1 изображено предложенное устройство, вид сбоку: на фиг. 2 - то же, вид сверху; на фиг, 3-то же, аксонометрическое изображение; на фиг, 4 - каркас; на фиг, 5 рычажный механизм передвижения.
Устройство coдep kит каркас 1, подмышечные опоры 2 и 3, поворотные катки 4, рьчажный механизм 5 передвижения и пояс 6 безопасности.
Каркас 1 состоит мз верхней 7 « нижней
8дугообразных рам, соединенных стойками
9и 10, и перемычки И, Каркас опирается на поворотные катки 4 (фиг, 1), установленные на плоскость прла. На верхней 7 и нижней 8 дугообразных ранах смонтированы подмышечные опоры 2 и 3, состоящие из колодок 12 и 13 с валиками 14 и 15 и эксцентриков 16 и 17, телескопически связанных со стойкамм 10 и фиксируемых в заданном положении фиксаторами 18. В нижних частях стоек
10укреплены подшипники 19 {фиг, 3),
Рычажный механизм 5 передвижений больного выполнен в виде левого 20 и правого 21 ручных рычагов, каждый из которых соединен через подшипники 19 с ножными толкателями 22 и 23, Последние выполнены в виде стержней 24 и 25 с поворотными лопатками 26 и 27 (фиг. 3), в которые вмонтированы фиксаторы положения (не показаны). На левом 20 и на правом 21 ручных рычагах (фиг, 5) шарнирно укреплены выше и ниже подшипников 19 тяги 28 и 29, к которым шарнирно присоединены стержни 30 и 31, жестко закрепленные к горизонтальной оси 32, Горизонтальная ось 32 установлена в подшипниках 33, смонтированных на кронштейне 34 (фиг, 3), жестко связанном со стойками 9 каркаса 1.
Пояс 6 безопасности, например, из кожи прикреплен к верхней 7 дугообразной раме каркасе 1 при помощи растяжек 35.
Устройство работает следующим образом.
Больному, перенесшему заболевание, повлекшее паралич 3-х конечностей, т,е. руКЗ и 2 ноги, или острое нарушение мозгового кровообращения с левосторонней (правосторонней) гемиплегией, т,е. левая нога и евая рука (правая рука м правая нога) неподвижны, укрепляют голеностопные суставы посредством наложения 8-образной повязки или эластичным бинтом (не показаны) и заводят при помощи родственников или медперсонала в устройство для передвижения больных. Затем застегивают в
области талии пояс 6 безопасности щ устанавливают больного так, чтобы подмышечные впадины удерживались колодками 12 и 13, которые отрегулированы по росту и полноте больного с помощью валиков 14 и 15 и
эксцентриков 16 и 17. При этом кисти рук больного обхватывают левый 20 и правый 21 ручные рычаги, а лопатки 26 м 27 ножных толкателей 22 и 23 устанавливают и фиксируют в горизонтальном положении за его
икроножные мышцы. Затем больной самостоятельно или с помоа ью медперсонала смещает свой центр тяжести на соответствующую здоровой руке ногу, выполняющую в данный момент функцию опорной, путем
наклона туловища в нужном направлении, например вправо-вперед, если здоровая рука - правая.
Дальнейшая работа устройства, если у больного паоалич двух ног и левой руки,
следующая ; усилием здоровой правой руки больной двигает вперед от сеоя на произвольный угол правый ручной рычаг 21, При этом в результате жесткости рычажного механизма 5 передвижения происходит отвод
лопатки 27 правого ножного толкателя 23 от икроножной мышцы правой ноги и движение вперед тяги 29, которая поворачивает на угол а стержни 30 и 31 с горизонтальной осью 32 и перемещает вперед тягу 28, за
счет чего происходит поворот левого рычага 20 с больной рукой на угол «назад на себя и движение левой ноги на шаг или полшага вперед с помощью лопатки 26 левого ножного толкателя 22. После этого больной перемещает центр тяжести на левую ногу и
она становится опорной. Затем больной двигает здоровой рукой правый ручной рычаг 21 назад на себя и правый ножной толкатель 23 подает правую ногу на шаг или полшага вперед. При этом работа рычажного механизма 5 повторяется, но в обратной последовательности.
Если у больного паралич двух ног и правой руки, работа устройства следующая ;
усилием здоровой левой руки больной двигает вперед от себя на произвольный угол левый ручной рычаг 20. При этом в результате жесткости рычажного механизма 5 передвижения происходит отвод лопатки 2$ левого ножного толкателя 22 от икроножной мышцы левой ноги и движение назад тяги 28. которая поворачивает на угол СЕ стержни 30 и 31 с горизонтальной осью 32 и перемещает назад тягу 2@, за счет чего происходит поворот правого ручного рычага 21 с больной правой рукой на угол а назад на себя и движение правой ноги на шаг или полшага вперед с по /ющь{О лопатки 27 правого ножного толкателя 23. После этого больной перемещает центр тяжести на правую HOiy и она становится опорной. Затем больной двигает здоровой рукой левый ручной рычаг 20 назад на себя и левый ножной толкатель 22 подает левую ногу на шаг или полшага в 1еред. При этом работа рычажного механизма S повторяется, но в обратной последовательности.
Таким образом, при движении вперед левого 20 иш правого 21 ручных рычагов происходит перемещение вперед устройства на поворотных катках.
Предлагаемое устройство должно обеспечить выполнение двух функций: разработку параяизоганных ног и одной руки с помощью одной здоровой руки и возможность регулировки ширины шага и высоты подъема ноги, близкой к функциональной ходьбе. При этом больной может самостоятельно управлять передвижением в устройстве и автономно передвигать каждую ногу и руку, разрабатывая парализованные конечности.
Формул а изобретения
Устройство для передвижения больных, содержащее каркас в-виде верхней и нижней дугообразных рам со стойками, подмышечные ОП01Ж. поворотные катки и рычажный механизм передвижения с.ножными толкателями, отличающееся тем, что, с целью Обеспечения возможности передвижения больных с отсутствием активных движений ног и одной руки, рычажный механизм передвижения выполнен в виде
левого и правого ручных рычагов, каждый из которых соединен через подшипники с ножными толкателями, причем левый и правый ручные рычаги связаны между собой при помощи двух стержней, жестко
закрепленных на горизонтальной оси, и двух тяг, одна из которых закреплена на |}ычаге ниже подшипника, а Д{уугая выше подшипника, а на верхней дугообразной раме каркаса установлен пояс без опасности.
fttt./
.З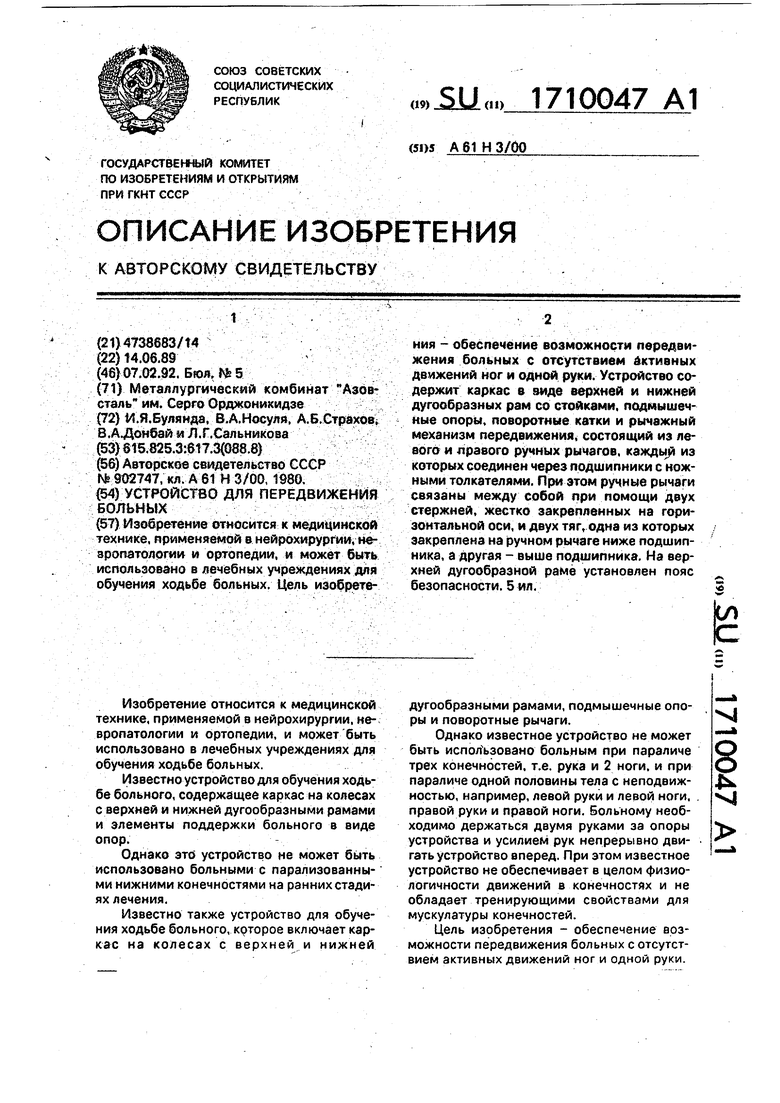
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ХОДЬБЕ БОЛЬНЫХ | 1992 |
|
RU2061454C1 |
| Устройство для обучения ходьбе больного | 1980 |
|
SU902747A1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ХОДЬБЫ | 2016 |
|
RU2637604C1 |
| УСТРОЙСТВО ДЛЯ ОБЛЕГЧЕНИЯ ХОДЬБЫ И ПЕРЕНОСКИ ГРУЗОВ | 1994 |
|
RU2118147C1 |
| СПОСОБ ВЕРТИКАЛИЗАЦИИ ПАЦИЕНТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2779360C1 |
| Способ лечебной ходьбы в воде | 2021 |
|
RU2757962C1 |
| СПОСОБ ОБУЧЕНИЯ НАВЫКАМ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2099038C1 |
| ПЕДАЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И/ИЛИ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ | 2004 |
|
RU2268026C2 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ В ВИДЕ СПАСТИЧЕСКОЙ ДИПЛЕГИИ | 2014 |
|
RU2571528C2 |
| ДИНАМИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ХОДЬБЕ БОЛЬНЫХ С НАРУШЕНИЕМ ПОЗЫ И ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ЦЕНТРАЛЬНОГО ПРОИСХОЖДЕНИЯ | 1997 |
|
RU2113836C1 |


Изобретение относится к медицинской технике, применяемой в нейрохирургии^, не^ зропатолргии и ортопедии, и может быть использовано в лечебных учреждениях для обучения ходьбе больных. !4ель изобретения - обеспечение возможности передвижения больных с отсутствием Активных движений ног и одной руки. Устройство содержит каркас в зиде верхней и нижней дугообразных рам со стойками, подмышечные опоры, поворотные катки и рычажный механизм передвижения^ состоящий из левого и правого ручных рычагов, каждь!^ из которых соединен через подшипники с ножными толкателями. При зтом ручные рычаги связаны между собой при помощи двух стержней, жестко закрепленных на горизонтальной оси, и двух тяг, одна из которых закреплена на ручном рычаге ниже подшипника, а другая - выше подшипника. На верхней дугообразной раме установлен пояс безопасности. 5 ил.^
| Устройство для обучения ходьбе больного | 1980 |
|
SU902747A1 |
| кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
