Изобретение относится к области медицины и может быть использовано в лечебных, реабилитационно-восстановительных и т.п. учреждениях, а также в домашних условиях для обучения правильным навыкам движения больных с нарушениями двигательных функций организма, например для обучения ходьбе, движению корпуса, головы, рук, для исправления осанки, и особенно для обучения естественным навыкам движения детей с задержкой психомоторного развития (ЗПМР), а также слепых людей.
Известны способы восстановления двигательных функций нижних конечностей после перенесенных травм, болезней типа полиомиэлита, паралича и т.п. путем тренировки с постепенным увеличением нагрузки с помощью устройств, обеспечивающих поддержание корпуса человека в нужном положении и создания требуемой нагрузки на определенные травмированные, атрофированные или слабо развитые мышцы нижних конечностей (А. с. N 1556675, пат. США N 5261682), известные устройства выполнены в виде рамных конструкций с регулируемыми по высоте приспособлениями для поддержания и фиксации тела человека в устройстве, например, с помощью корсета (A.C. N 1556675) подмышечных опор для рук (пат. США N 5261682) и др.
Известные способы и устройства обеспечивают возможность тренировки с постепенным нагружением нижних конечностей с целью реабилитации двигательных функций после травм, болезней и т.п. когда не требуется корректировка, исправление неправильных навыков и обучение правильным навыкам движения, например, как для детей с ЗПМР, которые сами не в состоянии корректировать движения.
Известны способы восстановления двигательных функций путем тренировки с принудительным выполнением двигательного цикла с помощью устройств, обеспечивающих сгибание и перемещение конечностей по заданной траектории с постепенным увеличением нагрузки ( А.С. N 975012, Пат. RU N 2020990, Пат. RU N 2020991).
Принципиальная конструкция известных устройств включает жесткий корсет, закрепленный на поясе или тазобедренной части корпуса человека, установленные на корпусе рычаги, закрепляемые на ногах, в частности на ступне, голени и бедре опорные элементы типа шин, шарнирно связанные между собой и управляемые рычагами через шарнирно-шестеренчатые с храповым механизмом и тягами приспособления. Известные способы и устройства предназначены для восстановления двигательных функций нижних конечностей после травм, параличей и т.п. в частности на начальной стадии реабилитации, когда ноги больного не способны нести нагрузку и больной не может самостоятельно их сгибать и перемещаться.
Известные способы и устройства практически полностью исключают обычные при ходьбе нагрузки, лишь отдаленно копируют естественный цикл ходьбы и не пригодны для корректировки и обучения правильным навыкам ходьбы детей и больных с неправильными или неразвитыми двигательными функциями.
Известен выбранный в качестве прототипа способ коррекции и обучения правильным навыкам движения с помощью кинетотерапевта или обучающего, когда обучающий держит обучаемого за руки и подталкиванием стимулирует к выполнению двигательного цикла ходьбы, контролируя изгиб и постановку ног обучаемого и заставляя его контролировать собственные движения (Н.Робенеску, Нейромоторное перевоспитание. Медиц. изд-во, Бухарест, 1972, с. 114-115). Указанный способ может быть также использован для обучения движениям и другими частями тела или группой мышц больного, например рукой, корпусом, головой. (В.А.Каган, Преодоление, Неконтактный ребенок в семье. Фолиант, СПБ, 1996 г. стр. 112-113).
Недостатком известного способа является отсутствие эффективных средств механического принуждения к копированию обучающимся естественных навыков движений здорового человека, поскольку средством воздействия на обучаемого для коррекции его движения являются руки и словесные наставления обучающего. Это создает трудности в обучении правильным навыкам движений детей с ЗПМР, эффективным методом обучения для которых может служить многократное принудительное воспроизведение с доведением до автоматизма циклов движения здорового человека.
Известно также устройство для ходьбы, принятое в качестве прототипа (пат. N 2030174). Указанное устройство содержит поясной ремень, жестко связанную с ним эластичную тягу, элементы крепления в виде системы ремней, элемент крепления стопы. Тренируемая нога обучаемого принудительно передвигается под действием эластичной тяги при перемещении центра тяжести на здоровую ногу.
Данное устройство имеет те же недостатки, что и устройства, описанные выше, а именно оно не в полной мере воспроизводит обычные при ходьбе нагрузки, отсутствует копирование естественного цикла ходьбы человека.
Кроме того, все вышеописанные устройства в значительной степени функциональны и направлены на восстановление двигательных функций только отдельных частей тела или группы мышц больного, в основном для обучения ходьбе больных, умеющих контролировать свои действия, и не могут быть использованы для обучения детей с ЗПМР естественным навыкам движения здорового человека, необходимым для самообслуживания.
Задачей изобретения является разработка способа и устройства для обучения больных с нарушениями двигательных функций организма навыкам движения в условиях естественной нагрузки на тренируемые части тела и группы мышц, а также обеспечение возможности обучения детей с ЗПМР, слепых и пр. естественным навыкам движения здорового человека, необходимым для самообслуживания, например работе рук, движениям корпуса, головы, и т.д.
Поставленная задача решается тем, что в способе обучения навыкам движения больных с нарушениями двигательных функций организма, включающем принуждение обучающим к многократному повторению обучаемым больным заданных циклов движения по меньшей мере одной частью тела, согласно изобретению, обучаемого механически принуждают повторять по меньшей мере одной частью тела циклы естественных движений здорового человека, передаваемых через механическую связь от той же части тела обучающего здорового человека.
Принудительная передача движения от обучающего через механическую связь к обучаемому стимулирует и направляет движения обучаемого, при этом обеспечивается практически полное копирование естественного цикла движения обучающего, т. е. здорового человека. При многократном воспроизведении обучаемым движений здорового человека он приобретает автоматизм в правильном их выполнении. Это позволяет обучать правильным навыкам движения больных, которые не в состоянии контролировать работу ног, рук, корпуса, головы и пр. например детей с ЗПМР, а также позволяет корректировать неправильные навыки, например неправильную осанку, постановку стоп больных и т.п.
Целесообразно корпусы обучающего и обучаемого скреплять друг с другом, обеспечивая поддержку обучаемого обучающим в невзвешенном опорном положении.
Фиксация обучаемого обучающим в невзвешенном опорном положении необходима в основном для обучения детей с задержкой психомоторного развития естественным навыкам движения здорового человека, а также при обучении ходьбе больных с нарушениями двигательных функций нижних конечностей, и обеспечивает поддержку обучаемого в правильном положении без снятия нагрузок его собственного веса.
Поставленная задача решается также тем, что в устройстве обучения навыкам движения больных с нарушениями двигательных функций организма, содержащем механизм принудительной передачи движения по меньшей мере к одной части тела обучаемого больного, согласно изобретению, указанный механизм выполнен с возможностью передачи принуждающих движений от той же части тела обучающего здорового человека.
Целесообразно, чтобы устройство содержало средство фиксации корпуса обучаемого больного в невзвешенном опорном положении, закрепляемое на телах обучаемого и обучающего.
Возможны различные варианты выполнения средства принудительной передачи движения, конструкция которых зависит от тренируемой части тела обучаемого, а также от его физического и интеллектуального развития.
В большинстве вариантов выполнения механизм принудительной передачи движения содержит по меньшей мере одну жесткую связь со средствами ее крепления к взаимодействующим частям тела обучаемого и обучающего.
При разном росте обучаемого и обучающего целесообразно, чтобы механизм принудительной передачи движения был выполнен с возможностью крепления жесткой связи к взаимодействующим частям тела обучаемого и обучающего на разных по высоте уровнях.
Во многих вариантах выполнения устройства механизм принудительной передачи движения содержит две жесткие тяги, соединенные со средствами их крепления к взаимодействующим частям тела обучаемого и обучающего, образующими с тягами подвижную раму в виде параллелограмма с изменяемыми углами между его сторонами, установленную с возможностью поворота вокруг осей, проходящих вдоль смежных с тягами сторон.
Для обучения навыкам ходьбы целесообразно, чтобы механизм принудительной передачи движения каждой взаимодействующей пары ног обучаемого и обучающего содержал связанные между собой две опорные платформы соответственно для стоп ног обучаемого и обучающего, каждая из которых имеет гибко соединенные между собой носочную и пяточную части.
В зависимости от состояния больного, его возраста, возможны различные варианты взаимного расположения и соединения опорных платформ для ступней ног.
Согласно одному из вариантов, опорная платформа обучаемого расположена над опорной платформой обучающего, пяточная часть которой снабжена жестким седлом, на котором шарнирно закреплена пяточная часть опорной платформы обучаемого, при этом носочная часть опорной платформы обучаемого шарнирно связана жесткими тягами с носочной частью платформы обучающего и образует с ней подвижную конструкцию в форме параллелограмма с изменяемыми углами. Кроме того, опорная платформа обучаемого может быть расположена сбоку от опорной платформы обучающего и жестко соединена с ней.
Целесообразно, чтобы устройство для обучения навыкам ходьбы дополнительно содержало механизм принудительного сгибания ноги по меньшей мере в коленном суставе, содержащий по меньшей мере одну жесткую тягу с элементами ее подвижного крепления к ногам обучающего и обучаемого в области коленного сустава обучаемого.
Для обучения навыкам движения корпусом, а именно наклонам вперед, назад, поворотам, целесообразно, чтобы механизм принудительной передачи движения содержал по меньшей мере две пары закрепляемых на корпусах обучаемого и обучающего поясов, имеющих жесткие элементы охвата части корпуса, при этом в каждой паре соответственно пояс обучаемого и обучающего связаны между собой по меньшей мере двумя параллельными разнесенными друг относительно друга жесткими тягами, соединенными с поясами карданными соединениями.
Для обучения наклонам корпуса вправо и влево пояса попарно соединены между собой по меньшей мере тремя параллельными жесткими тягами, между поясами установлен вертикальный стержень, разъемно набранный из жестких секций, подвижно сочлененных между собой с возможностью изгибания стержня по меньшей мере в двух взаимно перпендикулярных плоскостях, каждая из секций снабжена вертикальной прорезью, при этом центральные жесткие тяги каждой пары поясов пропущены через соответствующие им по высоте прорези в секциях и зафиксированы в них с возможностью качания, а стержень в нижней части жестко зафиксирован на набедренном поясе обучающего.
При различии в росте обучаемого и обучающего в каждой паре поясов целесообразно, чтобы жесткие тяги были выполнены с возможностью закрепления поясов на разных по высоте уровнях на обучаемом и обучающем.
Для этого каждый пояс в паре снабжен своей системой тяг, в которой крайние тяги, лежащие в одной плоскости, и центральная разнесены по высоте, при этом крайние тяги каждого пояса соединены карданными соединениями с рычагами, закрепленными на противоположных концах проставки, одеваемой на стержень, а в ближайших к концам проставки прорезях секций зафиксированы с возможностью качания центральные тяги каждого пояса.
Для обучения навыкам движения головы механизм принудительной передачи движения может содержать две жесткие тяги, соединенные рейками, образующими с тягами подвижную раму в виде параллелограмма с изменяемыми углами, первая рейка установлена параллельно направлению между висками на средстве крепления механизма к голове обучающего, а на средстве крепления механизма к голове обучаемого вертикально установлена скоба, с противоположных сторон которой выполнены ряды отверстий для установки в них второй рейки на заданном по высоте уровне, при этом подвижная рама установлена с возможностью поворота вокруг осей, проходящих вдоль реек.
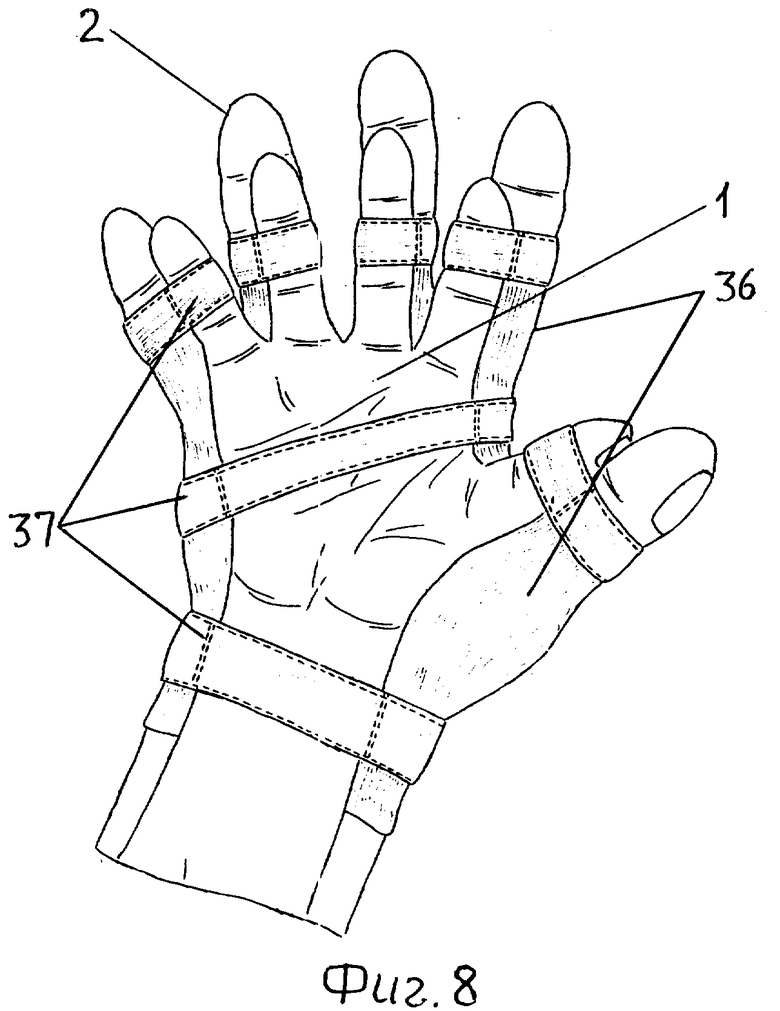
Для обучения навыкам движения кистей рук целесообразно, чтобы механизм принудительной передачи движения и средство его крепления были выполнены в виде перчатки с системой ремней, закрепляющих тыльную сторону кисти руки обучаемого поверх ладони обучающего.
Для обучения детей с сильной задержкой психомоторного развития естественным навыкам движения здорового человека целесообразно, чтобы устройство включало механизмы принудительной передачи движения корпуса, конечностей и головы, выполненные с возможностью расположения их элементов крепления для обучаемого и обучающего на разных по высоте уровнях, при этом механизм принудительной передачи движения корпуса содержал по меньшей мере три пары поясов, каждая из которых образована поясом обучаемого и обучающего, закрепляемых на корпусах обучаемого и обучающего от области таза до подлопаточной области, из которых две пары верхних снабжены жесткими элементами охвата части корпуса, соединенными попарно между собой по меньшей мере тремя параллельными жесткими тягами, имеющими карданные соединения с поясами, и установленный между поясами и жестко закрепленный относительно набедренного пояса обучающего вертикальный стержень, разъемно набранный из жестких секций, подвижно сочлененных между собой с возможностью изгибания стержня по меньшей мере в двух взаимно перпендикулярных плоскостях, каждая из секций снабжена вертикальной прорезью, при этом центральные жесткие тяги каждой пары поясов пропущены через соответствующие им по высоте прорези в секциях и зафиксированы в них с возможностью качания; механизм принудительной передачи движения головы содержит элементы крепления, охватывающие головы обучаемого и обучающего, соединенные между собой параллельными жесткими тягами, имеющими карданные соединения с элементами крепления и рычагами штока, шарнирно связанного со стержнем механизма принудительной передачи движения корпуса; механизм принудительной передачи движения ног для каждой пары взаимодействующих ног обучаемого и обучающего содержит механизм принудительного сгибания ноги в коленном и тазобедренном суставах, содержащий по меньшей мере две жесткие тяги с элементами их подвижного крепления к ногам обучающего и обучаемого в области коленного и тазобедренного суставов обучаемого, опорную платформу для стопы обучаемого и расположенную под ней опорную платформу для стопы обучающего, пяточные части которых связаны между собой механизмом в виде подвижного параллелограмма с изменяемыми углами между его сторонами, при этом элементы крепления жестких тяг в области бедра соединены с околобедренными поясами механизма принудительной передачи движения корпуса.
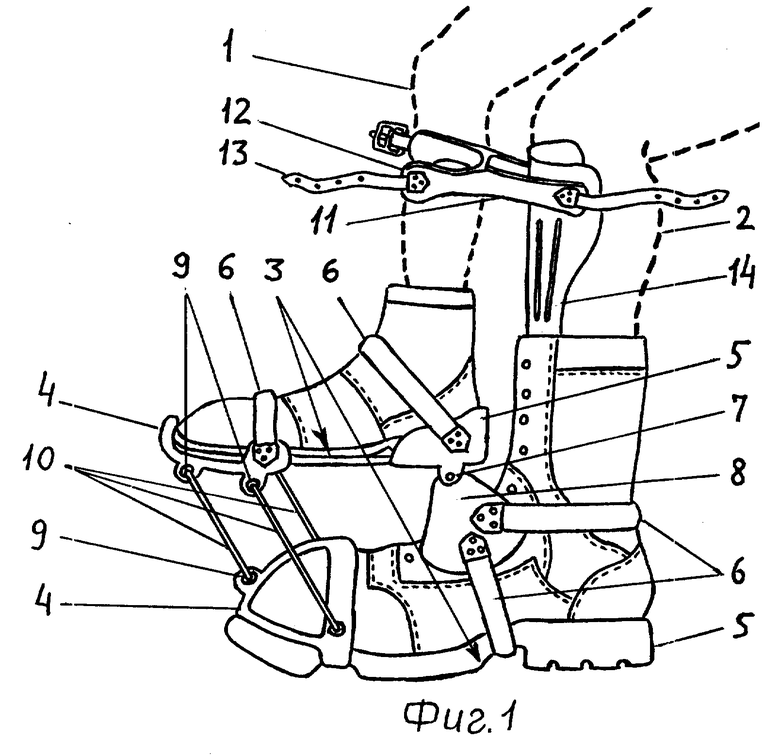
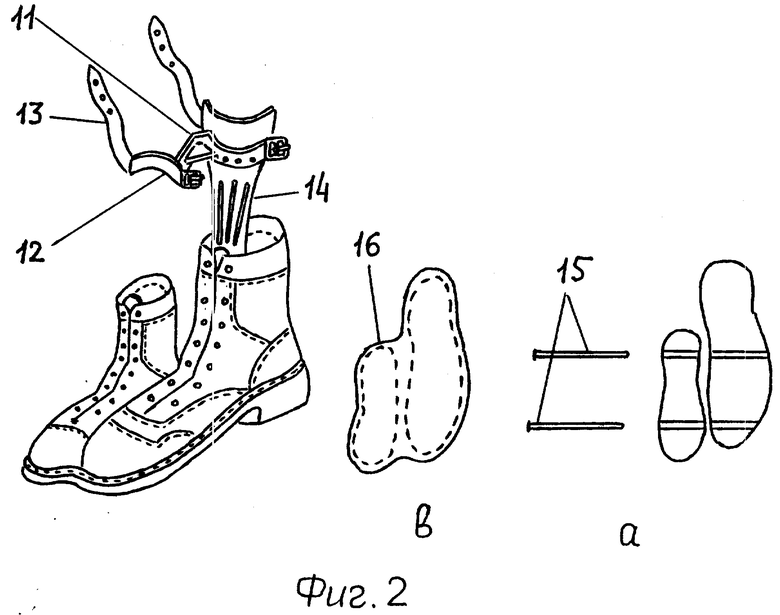
Более подробно предлагаемый способ будет рассмотрен на примерах работы предназначенных для его осуществления устройств, иллюстрируемых фигурами, на которых: фиг. 1 и фиг. 2 изображает варианты механизмов принудительной передачи движения ног; фиг. 3 пример использования механизма на фиг. 2 для обучения ходьбе;
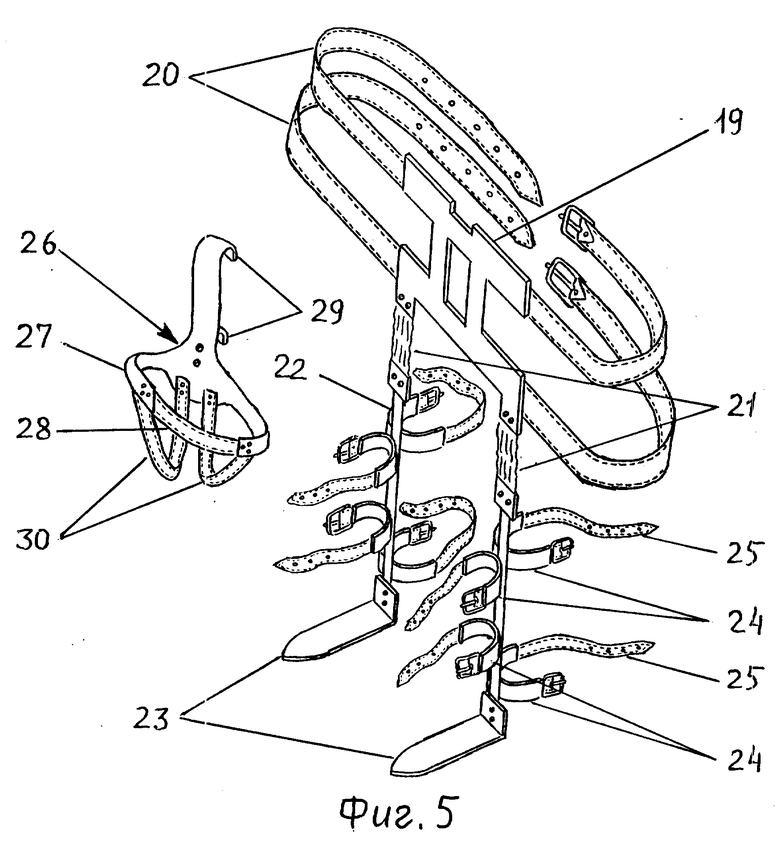
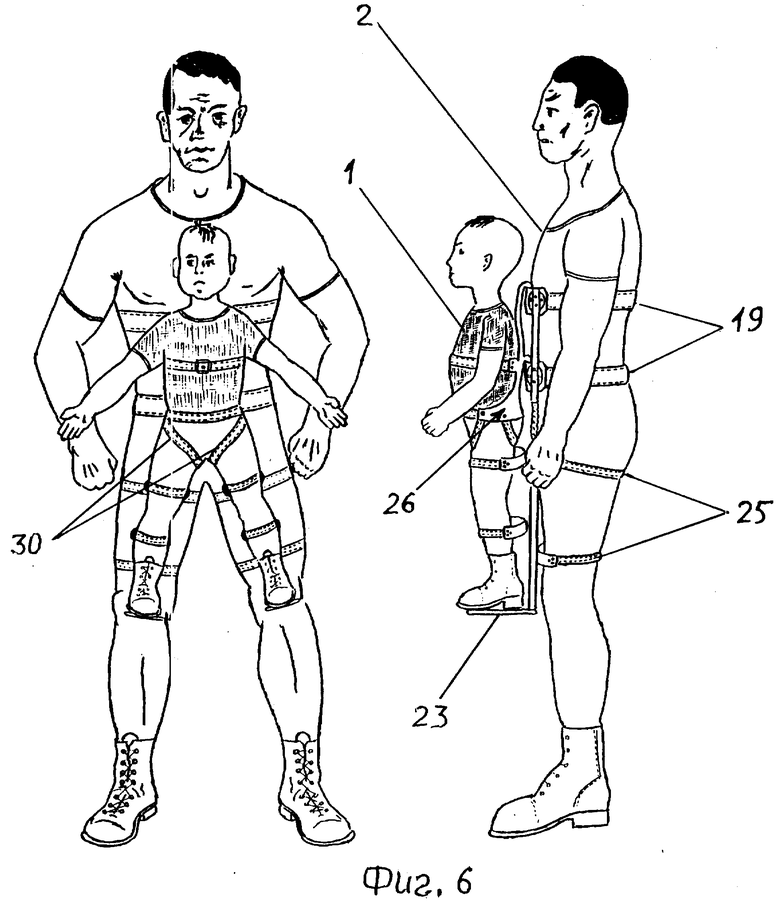
фиг. 4 применение механизма на фиг2 и одного из вариантов средства фиксации корпуса обучаемого больного; фиг. 5 один из вариантов средства фиксации корпуса обучаемого больного в невзвешенном опорном положении; фиг. 6 взаимное расположение обучаемого и обучающего для средства, изображенного на фиг. 5; фиг. 7 вариант механизма принудительной передачи движения головы; фиг. 8 кисти рук обучающего и обучаемого, соединенные с помощью механизма принудительной передачи движения кисти руки; фиг. 9, 10 варианты механизма принудительной передачи движения корпуса; фиг. 11 элемент устройства на фиг. 9 и 10; фиг. 12 вариант устройства для обучения детей с задержкой психомоторного развития навыкам движения здорового человека;
В зависимости от физического состояния обучаемого больного, его интеллектуального развития возможны различные варианты выполнения предлагаемого устройства. Например, для больных с нарушениями двигательных функций отдельных частей тела соответственно могут быть использованы устройства, содержащие механизмы принудительной передачи движений только к этой части тела обучаемого от соответствующей части тела обучающего здорового человека, как например при обучении ходьбе (фиг. 1, 2), движению корпуса (фиг. 9, 10), головы (фиг. 7), кистями рук (8). Для детей с сильной задержкой психомоторного развития требуется комплексное устройство, включающее механизмы передачи движения корпуса, головы, конечностей (фиг. 12) и обеспечивающее фиксацию корпуса обучаемого в правильном положении и его поддержку в невзвешенном опорном положении. При этом возможны различные варианты устройств и для одной части тела, конструктивные особенности которых также зависят от физического и интеллектуального развития обучаемых больных.
Например, в устройстве обучения навыкам ходьбы механизм принудительной передачи движения крепится соответственно к стопам обучаемого и обучающего и конструкция устройства зависит от взаимного расположения стоп обучаемого и обучающего. Стопы обучаемого могут фиксироваться над стопами обучающего (фиг. 1), сбоку (фиг. 2), а также впереди и сзади (не показано) стоп обучающего. Расположение ног обучаемого и обучающего определяется интеллектуальным развитием обучаемого, соотношением роста обучаемого и обучающего, наиболее естественным для телосложения обучаемого положением его ног. В частности, для обучения ходьбе детей дошкольного возраста с сохраненным интеллектом, например страдающих детским церебральным параличом, у которых, как правило, проблемы в основном с ногами и которые в состоянии контролировать свои поступки, стопы ног обучаемого фиксируют сбоку, с внутренней стороны стоп обучающего (фиг. 2). Для таких же детей школьного возраста, стопы ног обучаемого фиксируют над стопами ног обучающего (фиг. 1). Для детей с умственной отсталостью предпочтительным является использование устройства, в котором стопы ног обучаемого зафиксированы над стопами ног обучающего. При этом практически во всех случаях при обучении ходьбе корпус обучаемого скрепляют с корпусом обучающего, обеспечивая поддержку обучаемого в невзвешенном опорном положении обучающим (фиг. 4 и 6). В случае обучения взрослого человека с нарушением двигательных функций нижних конечностей, как правило, необходимо усилие двух обучающих, располагающихся по обе стороны от обучаемого (фиг. 3). В данном случае каждая нога обучаемого, соответственно, фиксируется сбоку, снаружи от ноги одного из обучающих.
На фиг. 1 изображено устройство для обучения навыкам ходьбы, в котором ступни ног обучаемого 1 фиксируют над ступнями обучающего 2 на опорных платформах 3, каждая из которых имеет гибко связанные между собой носочную и пяточную части 4 и 5, соответственно, и снабжена элементами крепления платформ к ступням ног. В качестве опорных платформ и элементов их крепления может быть использована обувь обучаемого и обучающего. Пяточная часть 5 платформы обучаемого 1, закрепляемая на обуви обучаемого ремнями 6, соединена шарниром 7 с жестким седлом 8, закрепленным ремнями 6 в области подъема стопы обучающего 2, которое снабжено средством (не показано) передачи веса тела обучаемого 1 на пяточную часть 5 платформы обучающего, в качестве которой служит каблук ботинка обучающего. Носки ботинок обучаемого 1 и обучающего 2 закреплены в носочных частях 4 платформ, выполненных сходно с лыжными креплениями. Носочные части 4 платформ шарнирно (шарниры 9) связаны между собой жесткими тягами 10, образуя подвижную конструкцию в форме параллелограмма с изменяемыми углами. Кроме того, обычно ноги обучаемого 1 и обучающего 2 соединяют в верхней части голени, около коленного сустава обучаемого с помощью механизма содержащего жесткую тягу 11 с жесткими элементами 12 охвата части голени обучаемого 1 и обучающего 2 и ремнями 13 для крепления жестких элементов 12 охвата на ногах обучаемого и обучающего. Указанный механизм предназначен для принудительного сгибания ноги обучаемого в коленном суставе. Для фиксации тяги 11 на ноге обучаемого около его коленного сустава элемент 12 охвата голени обучающего 2 закреплен на заданном уровне на обуви обучающего 2 жестком языке 14 его ботинка.
При ходьбе, в фазе переноса тела на носок, подошва ботинка обучающего 2 изгибается и носочная часть 4 платформы поворачивается относительно ее пяточной части 5, что вызывает, благодаря действию тяг 9, такой же поворот носочной части 4 платформы обучаемого 1, изгибающей носок его ботинка. Таким образом достигается механическое повторение обучаемым 1 движений обучающего 2 при каждом шаге.
Наиболее простым способом фиксации ноги обучаемого сбоку (фиг. 2) является соединение подошв обуви обучаемого и обучающего стержнями 15 (фиг. 2а), вставленными в прошивку подошв, либо выполнением обуви с общей подошвой 16 (фиг. 2 в). В этом случае, при ходьбе, обучаемый 1 (фиг. 3 и 4) также принудительно копирует цикл движения обучающего 2 с сохранением естественной нагрузки на ноги, создаваемой весом его тела.
Для обеспечения фиксации корпуса обучаемого больного в правильном положении без снятии нагрузок его собственного веса, а также для обеспечения безопасности при обучении ходьбе обучаемого 1 (фиг. 4 и 6) скрепляют с обучающим 2, обеспечивая поддержку обучаемого 1 в невзвешенном опорном положении обучающим 2. Возможны различные варианты выполнения указанной системы для скрепления тел обучаемого и обучающего. Например, изображенная на фиг. 4 система содержит грудные ремни 17, соответственно, для тела обучаемого 1 и обучающего 2. По меньшей мере один ремень для обучаемого 1, охватывающий его тело в области грудной клетки, например типа "детской уздечки", и два ремня для тела обучающего 2, один из которых охватывает его тело в области таза, а второй в области грудной клетки. Указанные грудные ремни 17 обучаемого 1 и обучающего 2 соединены между собой плечевыми ремнями 18 обучающего 2, проходящими с возможностью перемещения через его грудные ремни 17 спереди и закрепленными со стороны его спины. При этом плечевые ремни 18 обучающего 2 закреплены на грудном 18 ремне обучаемого 1 со стороны его спины. Грудные и плечевые ремни 17 и 18 обучающего 2 соединены между собой между лопатками. Для исключения вращающего момента плечевые ремни 18 снабжены пластиковыми ставками в области плеч.
Для обучения детей дошкольного возраста начальным навыкам ходьбы механизмы принудительной передачи движений ног и средство фиксации тела обучаемого больного в невзвешенном опорном положении выполнены в виде одного устройства, содержащего раму 19 (фиг5) с ремнями 20 для крепления на корпусе обучающего в области груди и ремнями 21, соединяющими раму 19 с расположенными вдоль ног обучаемого и обучающего планками 22, имеющими опорные платформы 23 для ног обучаемого, элементы 24 охвата части бедра обучаемого и обучающего и части голени с ремнями 25 для их закрепления на обучаемом и обучающем. Кроме того устройство содержит средство 26 поддержки обучаемого в области таза, выполненное по типу "детского подвесного сиденья", содержащее раму 27, охватывающую обучаемого сзади в области таза и замыкаемую спереди ремнем 28. Рама 27 снабжена крючками 29 для ее крепления на заданной высоте к раме 19 обучающего. Рама 27 снабжена ременными петлями 30, в которые продеваются ноги обучаемого. На фиг. 6 показан пример использования устройства на фиг. 5. При ходьбе обучающий 2 стимулирует обучаемого 1 к воспроизведению выполняемого им цикла движения. В результате обучаемый 1 принудительно повторяет цикл движения обучающего 2 с сохранением естественной нагрузки на ноги, создаваемой весом его тела.
Для обучения фиксации и движениям головы может быть использовано показанное на фиг. 7 устройство, содержащее механизм принудительной передачи движения головы со средствами крепления его к головам обучаемого 1 и обучающего 2, выполненными в виде системы ремней 31, охватывающих головы обучаемого 1 и обучающего 2. Механизм принудительной передачи движений головы содержит две параллельные жесткие тяги 32, шарнирно соединенные с рейками 33, образующими с тягами 32 подвижную раму в виде параллелограмма с изменяемыми углами.
Первая рейка 33 установлена параллельно направлению между висками на средстве крепления механизма к голове обучающего 2, а на средстве крепления механизма к голове обучаемого 2 вертикально установлена скоба 34, с противоположных сторон которой выполнены ряды отверстий 35 для установки в них второй рейки 33 на заданном по высоте уровне. При этом подвижная рама установлена с возможностью поворота вокруг осей, проходящих вдоль реек 33, которое обеспечивается, например, шарнирным соединением реек 33 и тяг 32, и зафиксирована от поперечного смещения относительно голов обучаемого и обучающего. Наличие скобы 34 с отверстиями 35 на средстве крепления механизма принудительной передачи движения к голове обучаемого 1 обеспечивает его установку на заданном по высоте уровне, необходимую при разном росте обучаемого и обучающего. Указанное устройство позволяет обучать больного фиксировать голову в правильном положении, а также наклонять и поворачивать голову, сохраняя естественные нагрузки на шейные мышцы и позвонки.
На фиг. 8 показан вариант устройства для обучения навыкам движения кисти рук, содержащий механизм принудительной передачи движения и средство его крепления, выполненные в виде перчатки 36 для обучающего 2 с системой ремней 37, закрепляющих тыльную сторону кисти руки обучаемого 1 поверх ладони обучающего 2. Указанное устройство дополнительно может содержать средство фиксации рук обучаемого и обучающего в области локтевого сустава, выполненное подобно средству фиксации голеней в устройстве для обучения ходьбе (фиг. 1).
Указанное устройство позволяет обучать больного ловить и бросать мяч, держать ложку, писать, мыть руки и т.п. Предложенное устройство позволяет как специально тренировать различные виды движений, так и обучаемому выполнять обыденные домашние дела, вовлекая в них обучаемого.
Для обучения навыкам движения корпуса, а именно наклонам и поворотам корпуса, механизм принудительной передачи движения содержит по меньшей мере две пары поясов 38 (фиг. 9), охватывающих корпусы обучаемого 1 и обучающего 2 на уровнях нижней части груди и лопаток, и пару поясов 39 (фиг. 11) на уровне таза. Пояса 38 (фиг. 9) обучаемого 1, со стороны спины, и пояса 38 обучающего 2, со стороны груди, выполнены жесткими и в каждой паре связаны между собой с жестких сторон параллельными, горизонтально расположенными жесткими боковыми тягами 40 и центральными тягами 41, соединенными с поясами 38, карданными соединениями 42, позволяющими передавать наклоны и повороты туловища от обучающего 2 к обучаемому 1. Между поясами 38, 39 установлен стержень 43, набранный из жестких цилиндрических секций 44 (фиг.9а), шарнирно сочлененных между собой, причем оси шарниров смежных сочленений ориентированы перпендикулярно друг другу, вследствие чего стержень 43 может изгибаться в двух взаимно перпендикулярных плоскостях. Стержень 43 может быть выполнен также с возможностью изгиба в указанных плоскостях в каждом из сочленений, например, сочленения секций 44 могут быть выполнены в виде карданных соединений. Стержень 43 играет роль "позвоночника", общего для обучаемого 1 и обучающего 2. Центральная жесткая тяга 41 проходит сквозь прорезь 45 в расположенной на подходящей высоте секции 44 стержня 43 и фиксируется в ней штифтом 46 с возможностью качания относительно его оси в пределах, ограничиваемых длиной прорези 45, что позволяет механически принуждать обучаемого 1 выполнять такие же наклоны туловища вправо и влево, какие делает обучающий 2, при этом тяги 40, 41 сохраняют горизонтальное положение.
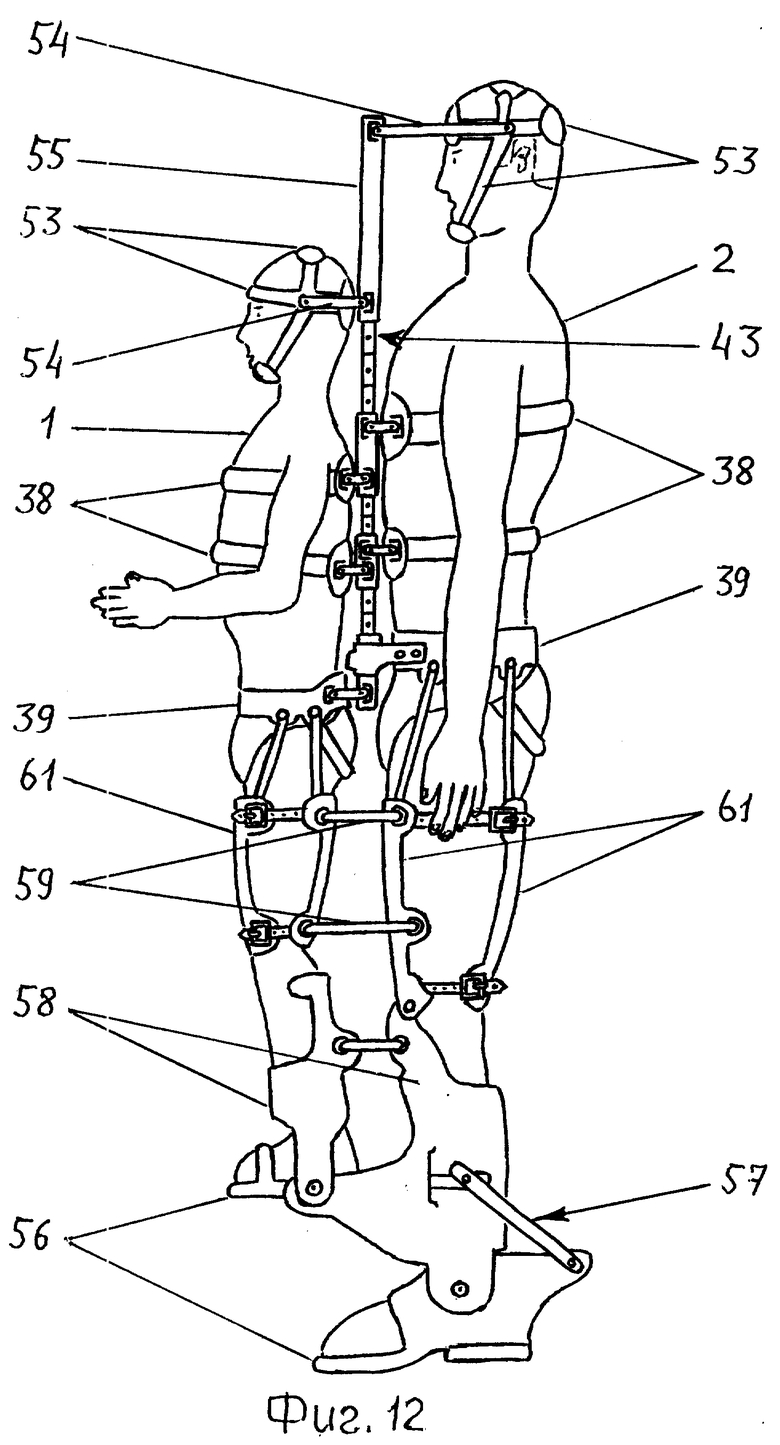
На фиг. 12 показано устройство для комплексного обучения навыкам движения больных детей, преимущественно предназначенное для выработки двигательных навыков у детей с сильной задержкой психомоторного развития, эффективным обучением для которых является механическое принуждение к многократному воспроизведению естественных движений здорового человека, которое сопровождается работой соответствующих групп мышц. Конструкция данного устройства предусматривает размещение обучаемого 1 перед обучающим 2, спиной к последнему. Устройство содержит механизмы принудительной передачи движения корпуса, головы и конечностей, при этом функции механизма принудительной передачи движения корпуса и средства фиксации тела больного выполняет система связанных тягами пар поясов, содержащая две пары поясов 38, охватывающих корпусы обучаемого 1 и обучающего 2 на уровнях нижней части груди и лопаток, и пару поясов 39 на уровне таза.
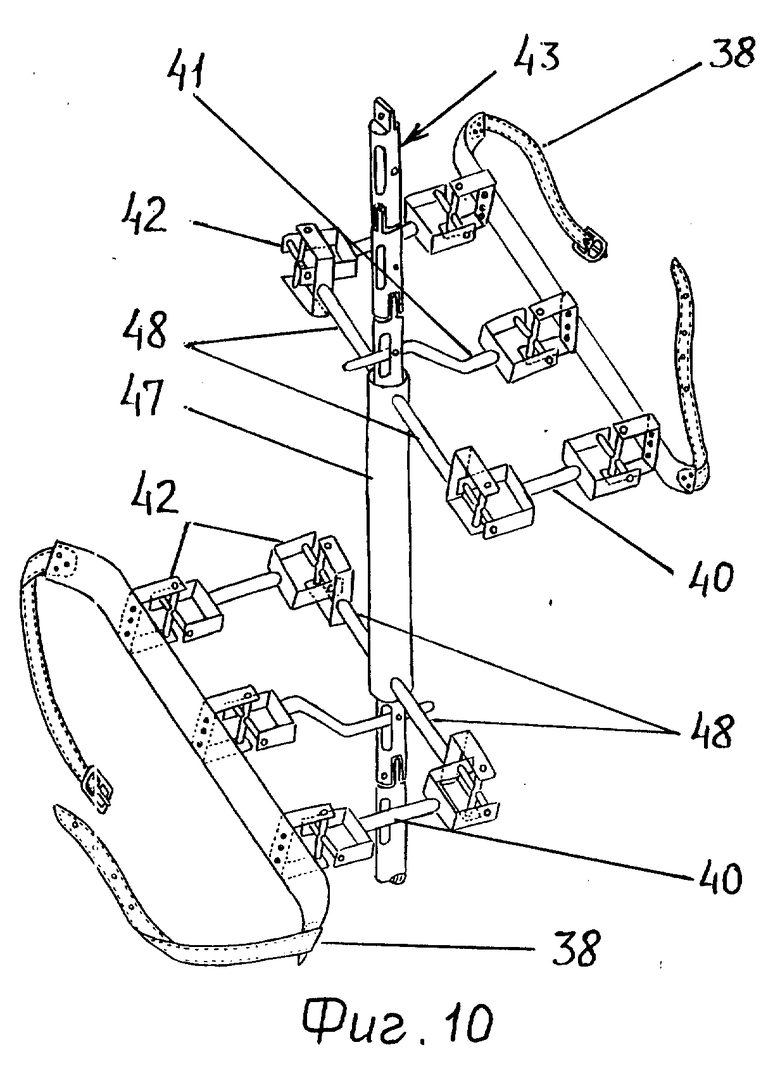
При значительном несоответствии роста обучаемого 1 и обучающего 2 используется вариант конструкции механических связей между их корпусами, изображенный на фиг. 10. В таком случае пояса 38 в каждой паре связаны между собой системой горизонтально расположенных тяг через надеваемую на стержень 43 с возможностью вращения вокруг его оси проставку 47 с Т-образно закрепленными на ее концах парами рычагов 48 с симметричными плечами. Длина проставки 47 для каждой пары поясов 38 выбирается таким образом, чтобы компенсировать разницу уровней их расположения по высоте на обучаемом 1 и обучающем 2. При этом в каждой паре поясов 38 боковые тяги 40 от пояса 38 обучаемого 1 соединяются карданными соединениями 42 с нижней парой рычагов 48, боковые тяги 40 от пояса 38 обучающего 2 соединяются карданными соединениями 42 с верхней парой рычагов 48, а центральные тяги 41 от поясов 38 фиксируются с возможностью качания в прорезях 45, ближайших снаружи к концам проставки 47 секций 44 стержня 43. Тяги 41 в этом случае выполняются изогнутыми для обеспечения заданных пределов их подвижности.
Пояс 39 (фиг. 11) обучающего 2, располагаемый в области таза, снабжен опорным узлом 49, на котором жестко закреплена нижняя секция 44 стержня 43. Опорный узел 49 имеет гнездо 50 с рядами коаксиальных отверстий 51 в его боковых стенках для шарнирного соединения с поясом 39 обучаемого 1, на подбираемых по высоте уровнях. Пояс 39 обучаемого 1 для надежной фиксации в области таза снабжен петлями 52, в которые продеваются ноги обучаемого.
Предложенное устройство может быть использовано для отработки комплекса движений, которые необходимо выполнять, чтобы садиться и вставать, при этом шарнирное соединение поясов 39 должно быть отрегулировано по высоте так, чтобы в положении сидя обучаемый 1 оказывался сидящим на коленях обучающего 2.
При обучении больных, способных самостоятельно удерживать тело в вертикальном положении, возможен вариант устройства (не показан) без использования стержня 43. При этом пояса 38 могут быть соединены только двумя боковыми тягами 40. Такой вариант устройства может быть использован для обучения наклонам вперед и назад и поворотам корпуса.
Для обучения навыкам движения головы механизм принудительной передачи движения содержит средства крепления в виде системы ремней 53 (фиг. 12), охватывающих соответственно головы обучаемого 1 и обучающего 2, связанных между собой по меньшей мере двумя жесткими тягами 54, соединенными с ремнями 53 карданными соединениями (не показано), аналогично соединению поясов 38 с тягами 40. При этом жесткие тяги 54, связанные с головными ремнями 53 обучаемого 1 и обучающего 2, соединены между собой на разных уровнях через шток 55. Шток 55 установлен как продолжение стержня 43, будучи шарнирно закреплен на его верхнем конце с возможностью поворота вокруг своей оси.
Для отработки поворотов головы может быть использована конструкция, аналогичная вышеописанной и показанной на фиг. 10.
Для обучения ходьбе данное устройство содержит две пары опорных платформ 56 (фиг. 12) для крепления ступней ног обучающего 2 и обучаемого 1, каждая взаимодействующая пара которых связана между собой в центральной и пяточной частях механизмом 57 в виде подвижного параллелограмма с изменяемыми углами. При этом механизм передачи принудительных движений ног может быть выполнен так же, как изображено на фиг. 1. Опорные платформы 56 (фиг. 12) шарнирно соединены с элементами 58 охвата голеней, которые попарно связаны жесткими тягами 59, имеющими шарнирное соединение с указанными элементами 58 охвата голени. При этом тяга 59 соединена с элементом 58 охвата голени обучающего 2 в области его колена для передачи сгибания ног в коленном суставе. Для передачи сгибания ног в тазобедренном суставе устройство содержит связанные ремнями 60 с поясами 39 элементы 61 охвата бедра обучаемого 1 и обучающего 2, шарнирно соединенные жесткими тягами 59.
На фиг. 12 условно одновременно показаны жесткие тяги 59, связывающие бедра, и аналогичные тяги 59, связывающие голени обучающего 2 и обучаемого 1 для передачи сгибания ног в коленном суставе. В конкретном исполнении устройства используется, в зависимости от соотношения роста обучающего и обучаемого, либо один, либо другой механизм передачи сгибания ног в коленном суставе.
Выше приведены конкретные примеры осуществления изобретения, допускающие различные изменения и дополнения, которые очевидны специалистам в данной области техники. Поэтому изобретение не ограничивается этими описанными примерами или отдельными элементами, и в него могут быть внесены изменения и дополнения, которые не выходят за пределы существа и объема изобретения, определенные формулой изобретения.





Использование: изобретение относится к области медицины и может быть использовано в лечебных, реабилитационно-восстановительных и т.п. учреждениях, а также в домашних условиях для обучения правильным навыкам движений детей и больных с нарушениями опорно-двигательных функций организма, в частности детей с отставанием в умственном развитии с неразвитыми или неправильными двигательными функциями, например для обучения ходьбе, движению корпуса, головы, рук. Способ обучения навыкам движения больных с нарушениями двигательных функций организма, а также детей с задержкой психомоторного развития, заключающийся в том, что обучаемого больного механически принуждают повторять по меньшей мере одной частью тела циклы естественных движений здорового человека, передаваемых через механическую связь от той же части тела обучающего здорового человека. Устройство обучения навыкам движения больных с нарушениями двигательных функций, содержащее механизм принудительной передачи движения по меньшей мере к одной части тела обучаемого больного, выполненный с возможностью передачи принуждающих движений по меньшей мере от той же части тела обучающего здорового человека. В зависимости от вида заболевания обучаемого и тренируемой части тела предложены различные варианты выполнения устройства. 2 с. и 16 з. п. ф-лы, 12 ил.