Изобретение относится к области медицинской техники, а именно к средствам передвижения неходячих парализованных пациентов, инвалидов.
В настоящее время существует множество устройств для облегчения перемещения и обучения, и реабилитации пациентов вновь ходить после продолжительного обездвиживания. Однако существуют и такие пациенты, которые полностью обездвижены и не могут воспользоваться такими устройствами. Они вынуждены быть пленниками своих квартир, не имея возможности общаться с природой и ощущая полную психологическую изоляцию.
Задачей предлагаемого изобретения является осуществление возможности перемещения, хождение таких людей без использования своих мышечных усилий для осуществления этого процесса, а также практически полное высвобождение усилий со стороны опекунов, которые заботятся о таких больных для осуществления перемещения последних.
Известно устройство для ходьбы, содержащее каркас с элементами крепления к туловищу, шарнирно связанными с каркасом шины, снабженными элементами крепления к ноге, опорный элемент и приспособление в виде перемещаемой рукоятки и шестерни (см. авт. св. СССР №975012 на изобретение «Устройство для ходьбы», заявлено 08.01.1981, опубликовано 23.11.1982, бюллетень №43).
Существенным недостатком данного запатентованного технического решения является его функциональная ограниченность в использовании, поскольку предусмотрено использование мускульной силы самого пациента, что не всегда реально для самого пациента.
Известно устройство для ходьбы, содержащее раму с опорными и задними колесами, упорами для рук, стойку с катком, шарнирно соединенную с передней частью рамы (см. авт. св. СССР №1512604 на изобретение «Устройство для ходьбы», заявлено 05.02.1988, опубликовано 07.10.1989, бюллетень №37).
Данное устройство также ограничено в применении, поскольку предусматривает использование мускульной силы самого пациента в процессе ходьбы и для удержания равновесия, что возможно не для всех пациентов. Устройство характеризуется сложностью регулирования устойчивого положения пациента в процессе ходьбы.
Известно мобильное устройство реабилитации пациентов, содержащее две Г-образные штанги на колесах, подвижно связанные плечами с корпусом и механизмом разведения и сведения штанг, вертикальную стойку, установленную на корпусе, стрелу, соединенную со стойкой и расположенную над штангами, силовой механизм подъема и опускания стрелы, траверс, установленный на конце стрелы, с динамометром и тягами, на которых подвешен корсет, регулируемые по высоте опорные поручни (см. патент РФ №2004230 на изобретение «Мобильное устройство реабилитации пациентов», заявлено 26.12.1991, опубликовано 15.121993, бюллетень 45-46).
Данное устройство также имеет функциональные ограничения в применении, поскольку предусматривает использование мускульной силы самого пациента в процессе ходьбы и для удержания, что возможно не для всех пациентов. Оно некомпактно, сложно для пациента в управлении при сведении и разведи штанг.
Известна конструкция компенсации веса человека при ходьбе и беге, содержащая седло, соединенную с ним раму, тазобедренные шарниры экзоног с двумя или тремя степенями свободы, экзоноги, накопитель упругой энергии, стопоры обратного хода экзоноги, подступник, обеспечивающий управление подъемом ноги, пружины возврата ноги вверх (см. патент РФ №2489130 на изобретение «Конструкция компенсации веса человека при ходьбе и беге», заявлено 28.11.2011, опубликовано 10.08.2013).
Известная конструкция обладает вышеуказанными недостатками, то есть также функционально ограничена в применении, поскольку предусматривает использование мускульной силы самого пациента в процессе ходьбы и для удержания, что возможно не для всех пациентов.
Анализ отобранной в процессе поиска информации позволил выявить наиболее близкое техническое решение, а именно устройство для облегчения ходьбы и переноски грузов, состоящее из каркаса, к которому присоединены регулируемые по длине ножные элементы, состоящие из бедренной и голенной частей, регулируемые по длине ручные элементы, состоящие из плечевой и предплечевой частей, седло, упор для головы с подголовником и спинная часть, регулируемые элементы крепления для ног и рук, подмышечные упоры (см. заявку №94024324 на выдачу патента РФ на изобретение «Устройство для облегчения ходьбы и переноски грузов». Заявлено 29.06.1994, опубликовано 27.08.1996).
Известное устройство достаточно эффективно, максимально снимает нагрузку с позвоночника в процессе ходьбы. Однако и здесь пациент прилагает собственные усилия в процессе передвижения. Это устройство невозможно использовать для пациентов, абсолютно обездвиженных, что весьма ограничивает его функциональную применимость. Кроме того, возможны поломки ножных и ручных шин в процессе передвижения, возможны падения и травмирование пациентов, что снижает его эксплуатационную надежность и безопасность.
Таким образом, известные устройства и конструкции для ходьбы пациентов с ограниченной возможностью передвижения характеризуются недостаточно высокой эффективностью их эксплуатации, недостаточной эксплуатационной прочностью, надежностью, ограниченностью в использовании.
Заявляемое в качестве изобретения техническое решение позволяет достичь нового технического результата - повышение его эксплуатационной надежности, прочности и безопасности и улучшение эксплуатационных возможностей устройства с максимальным исключением усилий, нагрузок на тело пациента как в стоячем положении, так и во время ходьбы.
Следующая совокупность существенных признаков характеризует сущность предлагаемого в качестве изобретения технического решения и способствует достижению нового технического результата.
Мобильное устройство для ходьбы, состоящее из каркаса, к которому присоединены регулируемые по длине ножные элементы, состоящие из бедренной и голенной частей, регулируемые по длине ручные элементы, состоящие из плечевой и предплечевой частей, седло, упор для головы с подголовником и спинная часть, регулируемые элементы крепления для ног и рук, верхний элемент крепления туловища, подмышечные упоры, отличающееся тем, что каркас, ножные и ручные элементы, седло, упор для головы с подголовником, спинная часть, подмышечные упоры и элементы крепления выполнены единой целой конструкцией в виде робота, корпус которого внутри выполнен пустотелым, имеющим целую заднюю часть с ножными и ручными элементами и каркас, открытую переднюю часть с ножными и ручными элементами, головная часть робота выполнена с открытой лицевой стороной, причем корпус робота снабжен дополнительными элементами крепления для туловища пациента, каркас и спинная часть робота выполнены с возможностью регулирования по длине.
Для достижения технического результата:
- седло выполнено складным и регулируемым в зависимости от размеров пациента, дополнительные элементы крепления расположены в средней и нижней части туловища пациента;
- задняя часть с ножными и ручными элементами и головная часть с подголовником, каркас робота выполнены с покрытием из прочных моющихся тканей, в частности из кожи или экокожи, и с внутренней мягкой эластичной прокладкой, в частности типа поролона;
- оно дополнительно снабжено защитными средствами для коленных суставов и амортизаторами, встроенными в каркас робота спереди и сзади.
Итак, анализ выявленной информации о существующем уровне техники в области медицинской техники и сущность предложенного изобретения показали, что предлагаемое в качестве изобретения техническое решение мобильного устройства для ходьбы отвечает условию патентоспособности «новизна».
Выполнение каркаса, ножных и ручных элементов, седла, упора для головы с подголовником и спинной части, элементов крепления единой целой конструкцией в виде робота обеспечивает необходимую эксплуатационную прочность, надежность и безопасность конструкции устройства при ходьбе для пациента. Кроме того, за счет регулируемости робота можно индивидуально подгонять конструкцию робота под каждого пациента в зависимости от его длины руг, ног, длины туловища в автоматическом режиме. Немалое значение имеет тот момент, что робот воспроизводит естественные движения человека при ходьбе.
Выполнение корпуса робота внутри пустотелым, имеющим целую заднюю часть с ножными и ручными элементами, каркас, и выполнение открытыми передней части с ножными и ручными элементами позволяет разместить абсолютно неподвижное парализованное тело пациента внутри корпуса робота, как будто размещают его в футляре, защищенном таким способом, но с открытой передней частью.
Выполнение головной части робота с открытой лицевой стороной позволяет надежно разместить голову пациента в головной части робота, как будто он одет в шапку-шлем. Это дополнительно обеспечивает надежную защиту головы пациента в процессе ходьбы, а также свободный обзор пациентом окружающей обстановки.
Снабжение корпуса робота дополнительными элементами крепления для туловища пациента, расположенными в средней и нижней части туловища пациента, наряду с другими элементами крепления рук и ног, верхней части туловища, позволяет надежно закрепить пациента внутри робота. Это обеспечивает безопасное нахождение пациента внутри робота как в стоячем положении, так и в процессе ходьбы, исключая любые выпадения пациента из корпуса робота.
Выполнение седла складным позволяет неходячего, парализованного пациента сначала разместить удобно, комфортно, безболезненно внутри робота, а затем уже выдвигать седло, не причиняя неудобств, не травмируя пациента во время его расположения внутри робота.
Выполнение седла регулируемым в зависимости от размера пациента позволяет после размещения последнего внутри робота отрегулировать необходимую длину седла так, чтобы пациент все время находился внутри робота в комфортном сидячем положении как во время передвижения робота, так и во время его нахождения в состоянии покоя.
Именно размещение пациента внутри корпуса робота как в футляре, надежное крепление рук, ног и туловища пациента, его постоянное нахождение в седле с использованием подмышечных упоров позволяет помимо обеспечения эксплуатационной надежности и безопасности максимально исключить негативное влияние усилий и нагрузок на тело пациента, кроме минимальных нагрузок на таз и плечевой пояс пациента при его опоре на седло и подмышечные упоры. Пациент, надежно закрепленный внутри корпуса робота, не прикладывает никаких усилий для перемещения, все делает робот.
Выполнение задней части с ножными и ручными элементами и головной части с упором для головы с подголовником, каркаса робота с покрытием из прочных моющихся тканей, в частности из кожи или экокожи, и с внутренней мягкой эластичной прокладкой, в частности типа поролона, обеспечивает не только комфортное размещение пациента внутри робота, но и соблюдение необходимого санитарно-гигиенического ухода за пациентом и устройством.
Дополнительное снабжение устройства защитными средствами для коленных суставов пациента и амортизаторами, встроенными в каркас робота спереди и сзади и срабатывающими при нажиме на них во время падения робота вперед и навзничь, и предотвращающими жесткие удары, обеспечивает дополнительную защиту пациента в случае падения робота на колени, вперед и навзничь.
Следовательно, предлагаемое в качестве изобретения мобильное устройство для ходьбы обеспечивает достижение поставленного нового технического результата.
Таким образом, предлагаемая совокупность существенных признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
В ходе проведенного заявителем поиска информации в области медицинской техники не обнаружены существенные отличительные признаки заявленного изобретения среди известных объектов того же назначения. Не обнаружена совокупность существенных признаков предлагаемого изобретения, способствующая достижению нового технического результата, и ее влияние на последний.
Именно совокупность существенных отличительных признаков позволяет получить новый технический результат - повышение его эксплуатационной надежности, прочности и безопасности и улучшение эксплуатационных возможностей устройства с максимальным исключением усилий, нагрузок на тело пациента как в стоячем положении, так и во время ходьбы.
Следовательно, предлагаемое изобретение обладает таким условием патентоспособности, как «изобретательский уровень».
Предлагаемое изобретение поясняется с помощью чертежей, где:
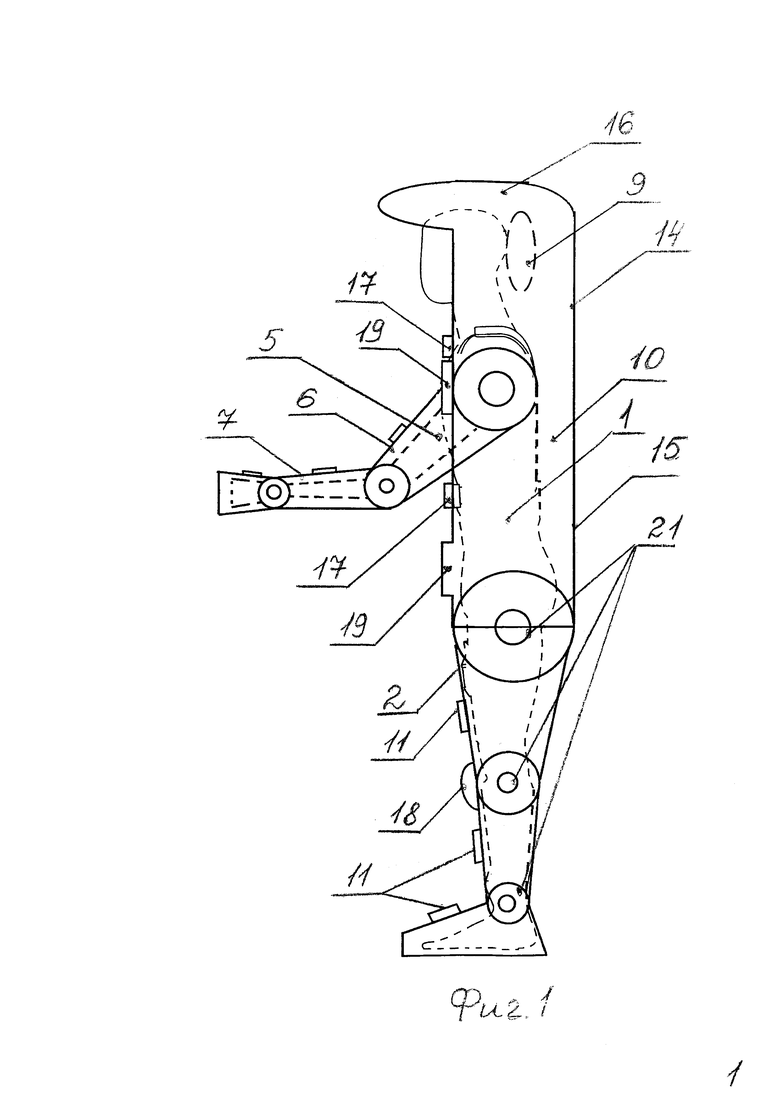
На фиг. 1 схематично изображена конструкция трансформируемого робота-андроида, вид сбоку с пациентом;
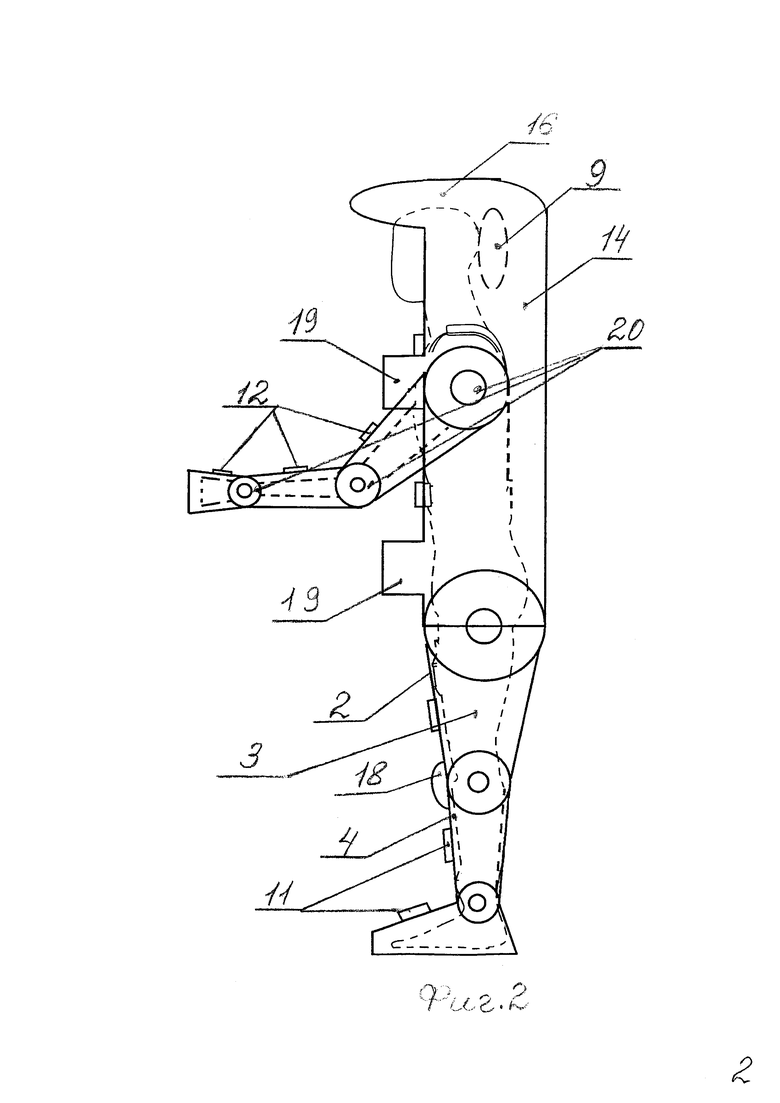
фиг. 2 - то же, с амортизаторами в рабочем состоянии;
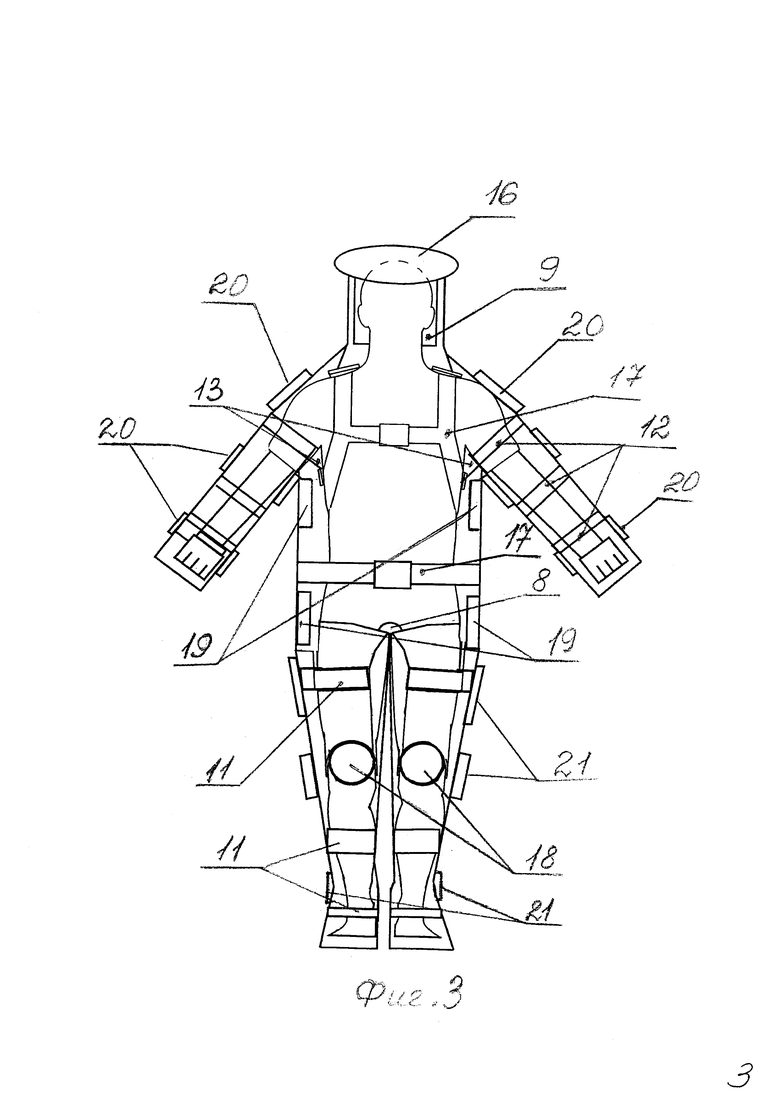
фиг. 3 - то же, вид спереди с пациентом.
Лучший вариант осуществления изобретения
Мобильное устройство для ходьбы состоит из каркаса 1 (см. фиг. 1, 2), к которому присоединены регулируемые по длине ножные элементы 2, состоящие из бедренной 3 и голенной 4 частей, регулируемые по длине ручные элементы 5, состоящие из плечевой 6 и предплечевой 7 частей, седло 8 (см. фиг. 3), упор 9 для головы с подголовником и спинная часть 10, регулируемые элементы крепления для ног 11 и рук 12, подмышечные упоры 13.
Каркас 1 (боковины корпуса робота 14), ножные 2 и ручные 5 элементы, седло 8 (см. фиг. 3), упор 9 для головы с подголовником, спинная часть 10 и подмышечные упоры 13, элементы крепления пациента выполнены единой целой конструкцией в виде робота 14.
Корпус робота 14 внутри выполнен пустотелым, имеющим целую заднюю часть 15 с ножными 2 и ручными 5 элементами и каркас 1, открытую переднюю часть с ножными 2 и ручными 5 элементами. Задняя часть 15 робота 14 - это спинная часть 10, подмышечные упоры 13, задние части ножных 2 и ручных 5 элементов. Упор 9 для головы с подголовником расположен в головной части 16 робота 14, головная часть 16 выполнена с открытой лицевой стороной.
Пациент на фиг. 1, 2 изображен штрихпунктиром (он внутри корпуса робота, невидим). На фиг. 3 пациент виден из-за открытой передней части корпуса робота 14.
Корпус робота 14 снабжен элементами крепления 17 для туловища пациента, расположенными в верхней, средней и нижней частях туловища пациента. На фиг. 1, 2, 3 показаны элементы крепления 17 в верхней и нижней частях туловища пациента.
Все элементы 11, 12, 17 для крепления пациента внутри робота 14 выполнены из прочного, но достаточно мягкого материала, например из натуральной кожи или экокожи, и могут быть, как один из вариантов, снабжены специальными замками с защелками. Элементы крепления 11 выполнены для бедренной 3 и голенной 4 частей. Элементы крепления 12 выполнены для плечевой 6 и предплечевой 7 частей. При необходимости могут быть предусмотрены элементы крепления и для запястий, и ступней, как показано на фигурах.
Седло 8 выполнено складным и регулируемым в зависимости от размеров пациента. Задняя часть 15 и каркас 1 робота 14 выполнены с покрытием из прочных моющихся тканей, в частности из кожи или экокожи, и с внутренней мягкой эластичной прокладкой, в частности типа поролона.
Корпус робота 14 дополнительно снабжен защитными средствами 18 для коленных суставов и амортизаторами 19. Средства 18 выполнены, например, откидными или съемными. Амортизаторы 19 встроены в каркас 1 робота 14 спереди и сзади и выполнены, например, в виде пружин. На фиг. 2 - амортизаторы 19 в рабочем состоянии, на фиг. 1, 3 - в сложенном нерабочем состоянии. Амортизаторы 19 на фиг. 1, 2 изображены на передней части робота 14, однако они встроены и со стороны задней части 15 робота 14 (не показаны). Амортизаторы 19 предотвращают жесткие удары при падении робота 15 вперед или навзничь (если робот падает не на колени).
Позиция 20 - это схематичное изображение мест подвижности ручных элементов 5 робота 14.
Позиция 21 - это схематичное изображение мест подвижности ножных элементов 2 робота 14.
Регулируемый робот 14 - это конструкция промышленно-заводского изготовления, для управления которой разработана специальная компьютерная программа. Эта программа обеспечивает безопасное перемещение робота 14, исключающее его падение навзничь или передом. Для простоты управления роботом 14 для перемещения пациента предназначен переносной пульт управления.
Использование мобильного устройства для ходьбы в виде робота осуществляют следующим образом.
Перед первым использованием данного мобильного устройства в виде регулируемого робота 14 измеряют вручную длину ног (с голенной и бедренной частями отдельно), длину рук (с плечевой и предплечевой частями отдельно), длину туловища пациента.
За счет автоматической регулируемости робота 14 известным образом (например, с помощью телескопического исполнения рук, ног, каркаса и спинной части) регулируют ножные 2, включая бедренную 3 и голенную 4 части, и ручные 5 элементы, включая плечевую 6 и предплечевую 7 части, длину каркаса 1 и спинной части 10 робота 14 под пациента. Этот процесс достаточно осуществить один раз при первом использовании робота 14 для конкретного пациента.
К месту нахождения парализованного пациента подносят отрегулированного под него робота 14, укладывают в горизонтальное положение. Рядом аккуратно укладывают пациента, которого затем в горизонтальном положении размещают внутри робота 14.
Проверку размещения пациента осуществляют вручную следующим образом. Голова пациента должна располагаться на головном упоре 9 с подголовником в головной части 16 робота 14, подмышки пациента - на подмышечных упорах 13, таз пациента - на седле 8, ноги и руки пациента - так, чтобы коленные чашечки, бедренные, локтевые и плечевые сгибы пациента располагались внутри робота 14 в соответствующих местах. Затем выдвигают на необходимое расстояние складное седло 8 для комфортного расположения пациента на нем. Таким образом, пациент размещен внутри робота 14 как в футляре, но с открытой передней частью и открытой лицевой стороной головной части 16 с возможностью свободного обзора окружающей обстановки.
Затем известным способом закрепляют элементы крепления 11, 12, 17 и защитные приспособления 18 соответственно для ног, рук, туловища и коленей пациента, чтобы пациент надежно был закреплен и защищен внутри робота 14 от возможных выпадений из последнего и защиты в случае падения робота 14 на колени. Именно размещение пациента внутри корпуса робота 14 как в футляре, надежное крепление рук, ног и туловища пациента, его постоянное нахождение в седле 8 с использованием подмышечных упоров 13 позволяет помимо обеспечения эксплуатационной надежности и безопасности максимально исключить любое негативное влияние усилий и нагрузок на тело пациента, кроме минимальных нагрузок на таз и плечевой пояс пациента при его опоре на седло 8 и подмышечные упоры 13.
После выполнения всех необходимых процедур осуществляют подъем робота 14 вместе с пациентом в автоматическом режиме, например, с помощью пульта управления. Опекун или любое лицо, следящее за пациентом, не прикладывая никаких усилий, пользуясь пультом управления роботом, осуществляет лишь контроль за подъемом, передвижением робота 14 вместе с пациентом. Кроме того, в отдельных случаях, когда пациент может управлять своими руками, он сам осуществляет подъем и перемещение внутри робота 14, самостоятельно пользуясь пультом управления.
В случаях каких-либо программных сбоев и падении робота 14 передом либо навзничь задней частью 15 срабатывают амортизаторы 19 при нажиме на них во время падения робота 14. Амортизаторы 19 предотвращают жесткие удары, обеспечивая дополнительную защиту пациента в случае падения робота 14.
Предлагаемое в качестве изобретения мобильное устройство для ходьбы значительно облегчает уход опекуну, лицу, ухаживающему за неходячим пациентом, поскольку не требует приложения физических усилий для передвижения пациента. Пациент, надежно закрепленный внутри корпуса робота 14, не прикладывает никаких усилий для перемещения, все делает робот 14.
С использованием предлагаемого мобильного устройства безнадежно парализованный пациент имеет возможность перемещаться как дома, так и вне дома, например, на садовом дачном участке, не чувствуя изолированности от мира. Этот фактор может стать сильным стимулом для реабилитации пациента.
Таким образом, в результате применения заявленного изобретения достигается новый технический результат - повышение его эксплуатационной надежности, прочности, безопасности и улучшение эксплуатационных возможностей устройства с максимальным исключением усилий на тело пациента как в стоячем положении, так и во время ходьбы
Следовательно, предлагаемое изобретение соответствует условию патентоспособности «промышленная применимость».
Данное изобретение рекомендуется использовать для пациентов, для которых реабилитация по тем или иным причинам уже невозможна. Возможно его использовать и на начальных этапах реабилитации лежачих не безнадежных к восстановлению больных.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЛЕГЧЕНИЯ ХОДЬБЫ И ПЕРЕНОСКИ ГРУЗОВ | 1994 |
|
RU2118147C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ХОДЬБЕ БОЛЬНЫХ | 1992 |
|
RU2061454C1 |
| Кушетка | 1987 |
|
SU1616664A1 |
| Устройство для подводного вытяжения позвоночника | 1985 |
|
SU1377100A1 |
| Способ тракционной кинезитерапии | 2025 |
|
RU2839215C1 |
| КРЕСЛО ОПЕРАТОРА | 1992 |
|
RU2068646C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И КОРРЕКЦИИ ОСАНКИ | 2001 |
|
RU2203711C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ КОРРЕКЦИИ ПОЗЫ И ДВИЖЕНИЙ ВЕРХНЕЙ КОНЕЧНОСТИ В ЛОКТЕВОМ СУСТАВЕ | 2021 |
|
RU2778777C1 |
| СПОСОБ ФИКСАЦИИ ПАЦИЕНТА ДЛЯ ПРОВЕДЕНИЯ РОТАЦИОННОЙ ЛУЧЕВОЙ ТЕРАПИИ ГОРИЗОНТАЛЬНЫМ ТЕРАПЕВТИЧЕСКИМ ПУЧКОМ ПРОТОНОВ И УСТРОЙСТВО КРЕСЛА ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 1998 |
|
RU2149662C1 |
| СПОСОБ НЕЙРОДИНАМИЧЕСКОЙ (НЕЙРОСЕНСОРНОЙ) КОРРЕКЦИИ ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ, ПОЗНЫХ, СЕНСОРНЫХ И КОГНИТИВНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ПАТОЛОГИЕЙ НЕРВНОЙ СИСТЕМЫ И ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И КОСТЮМ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2013 |
|
RU2573535C2 |
Изобретение относится к области медицинской техники, а именно к средствам передвижения неходячих парализованных пациентов, инвалидов. Каркас 1, ножные 2 и ручные 5 элементы, седло 8, упор 9 для головы с подголовником, спинная часть 10, подмышечные упоры 13 устройства выполнены единой целой конструкцией в виде робота 14. Корпус робота 14 внутри выполнен пустотелым, имеющим целую заднюю часть 15 с ножными 2 и ручными 3 элементами и каркас 1, открытую переднюю часть с ножными 2 и ручными 3 элементами. Упор 9 для головы с подголовником расположен в головной части 16 робота 14, головная часть 16 выполнена с открытой лицевой стороной. Все элементы 11, 12, 17 для крепления пациента внутри робота 14 выполнены из прочного, но достаточно мягкого материала, например из натуральной кожи или экокожи. Седло 8 выполнено складным и регулируемым в зависимости от размеров пациента. Задняя часть 15 с ножными 2 и ручными 3 элементами и головная часть 16, каркас 1 робота 14 выполнены с покрытием из прочных моющихся тканей, в частности из кожи или экокожи, и с внутренней мягкой эластичной набивкой - прокладкой, в частности типа поролона. Корпус робота 14 дополнительно снабжен защитными средствами 18 для коленных суставов и амортизаторами 19, встроенными в каркас спереди и сзади. Для простоты управления роботом 14 для перемещения пациента предназначен переносной пульт управления. Перед первым использованием робота 14 вручную измеряют длину ног, длину рук, длину туловища пациента. За счет автоматической регулируемости робота 14 регулируют ножные 2 и ручные 5 элементы, длину каркаса 1 и спинной части 10 робота 14 под пациента. Этот процесс достаточно осуществить один раз при первом использовании робота 14. К месту нахождения парализованного пациента подносят отрегулированного под него робота 14, укладывают в горизонтальное положение. Затем пациента в горизонтальном положении размещают внутри робота 14, проверку размещения пациента осуществляют вручную. Затем выдвигают на необходимое предварительно определенное расстояние складное седло 8 под данного пациента, закрепляют элементы крепления 11, 12, 17. Осуществляют подъем робота 14 вместе с пациентом в автоматическом режиме, например, с помощью пульта управления. Опекун, не прикладывая никаких усилий, пользуясь пультом управления роботом, осуществляет лишь контроль за подъемом и передвижением робота 14 вместе с пациентом. Использование устройства позволяет повысить эксплуатационные возможности с максимальным исключением усилий и нагрузок на тело пациента. 3 з.п. ф-лы, 3 ил.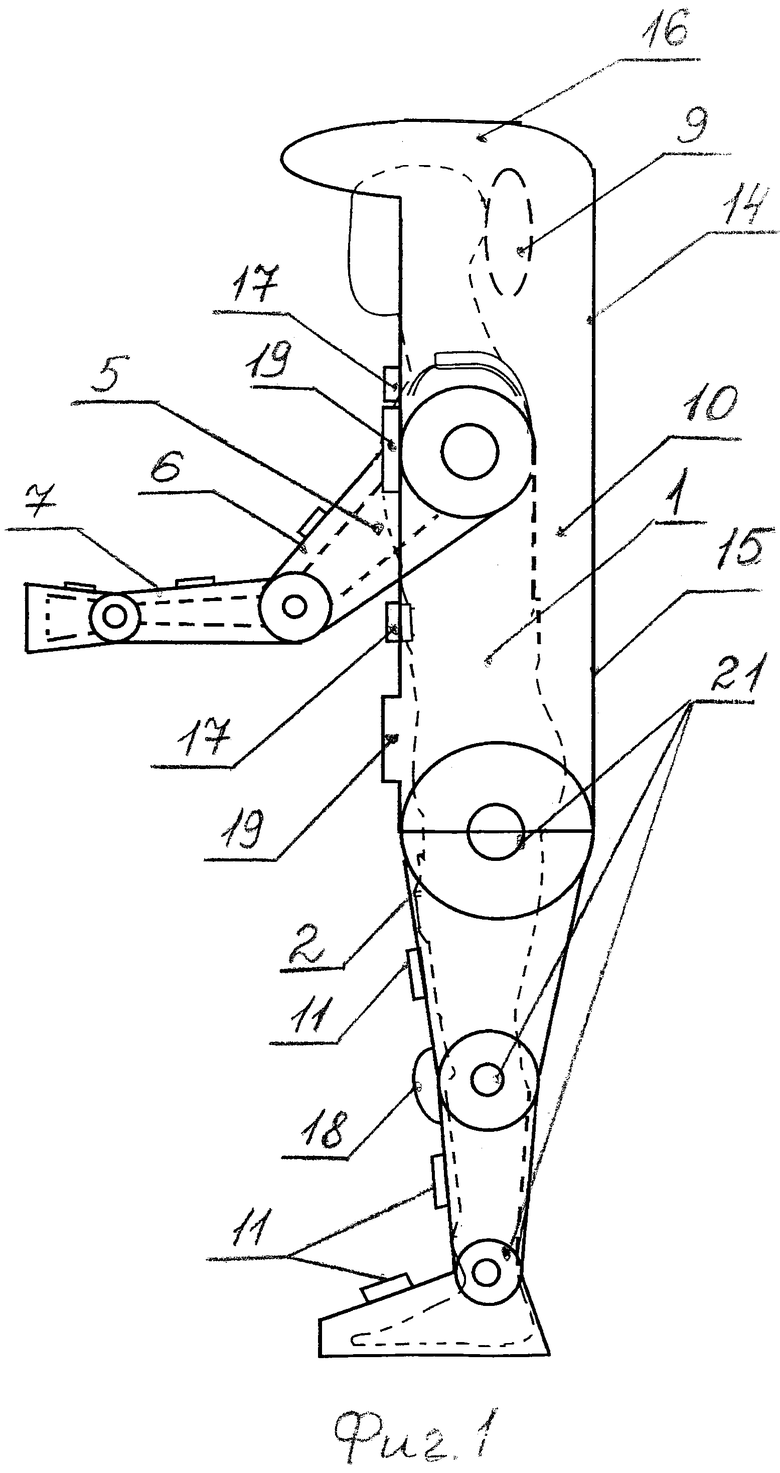
1. Мобильное устройство для ходьбы, состоящее из каркаса, к которому присоединены регулируемые по длине ножные элементы, состоящие из бедренной и голенной частей, регулируемые по длине ручные элементы, состоящие из плечевой и предплечевой частей, седло, упор для головы с подголовником и спинная часть, регулируемые элементы крепления для ног и рук, верхний элемент крепления туловища, подмышечные упоры, отличающееся тем, что каркас, ножные и ручные элементы, седло, упор для головы с подголовником, спинная часть, подмышечные упоры и элементы крепления выполнены единой целой конструкцией в виде робота, корпус которого внутри выполнен пустотелым, имеющим целую заднюю часть с ножными и ручными элементами и каркас, открытую переднюю часть с ножными и ручными элементами, головная часть робота выполнена с открытой лицевой стороной, причем корпус робота снабжен дополнительными элементами крепления для туловища пациента, каркас и спинная часть робота выполнены с возможностью регулирования по длине.
2. Мобильное устройство по п. 1, отличающееся тем, что седло выполнено складным и регулируемым в зависимости от размеров пациента, дополнительные элементы крепления расположены в средней и нижней части туловища пациента.
3. Мобильное устройство по п. 1, отличающееся тем, что задняя часть с ножными и ручными элементами и головная часть с подголовником, каркас робота выполнены с покрытием из прочных моющихся тканей, в частности из кожи или экокожи, и с внутренней мягкой эластичной прокладкой, в частности типа поролона.
4. Мобильное устройство по п. 1, отличающееся тем, оно дополнительно снабжено защитными средствами для коленных суставов и амортизаторами, встроенными в каркас робота спереди и сзади.
| УСТРОЙСТВО ДЛЯ ОБЛЕГЧЕНИЯ ХОДЬБЫ И ПЕРЕНОСКИ ГРУЗОВ | 1994 |
|
RU2118147C1 |
| 0 |
|
SU155566A1 | |
| УНИВЕРСАЛЬНЫЙ ОБЩЕВОЙСКОВОЙ ЭКЗОСКЕЛЕТ | 2013 |
|
RU2552703C2 |
| 0 |
|
SU155566A1 | |
| US 20150134080 A1, 14.05.2015 | |||
| CN 103301007 A, 18.09.2013. | |||

