Изобретение относится к рыбообработке и предназначено для подачи рыбы в рыборазделочные машины.
Известно ориентирующее устройство, содержащее наклонную плоскость, скользя по которой рыба стремится развернуться головой вперед. Это явление основано на неоднородности коэффициента трения по- верхности рыбы. Коэффициент трения рыбы при движении против чешуи больше, чем при движении по чешуе. Поэтому, двигаясь по наклонной плоскости, рыба стремится принять положение, при котором сопротивление движению минимально, а именно, головой вперед.
Недостаток этого устройства - медленное действие, поскольку рыба разворачивается под действием довольно слабого момента сил трения, преодолевая при этом существенный момент инерции, который для крупной рыбы очень велик. Другой недостаток - громоздкость, вызванная необходимостью иметь большую длину плоскости, чтобы рыба различного размера успела в процессе движения развернуться.
Наиболее близким по технической сущности к предлагаемому является устройство для ориентирования рыбы, содержащее наклонный продуктопровод, в днище которого . расположена щель почти перпендикулярно по отношению к направлеь лю подачи рыбы. С боковой стороны продуктопровода выполнена полукруглая чашеобразная емкость. Верхняя и нижняя кромки щели в вертикальном направлении взаимно перекрыты и имеют определенный промежуток. При прохождении рыбы по продуктопроводу головой вперед она проходит под щелью без задержек, а при прохождении хвостом попадает в щель, застревает и под влиянием инерционных сил головной части рыбы начинает совершать маневр (разворот) с использованием в качестве точки опоры щели.
Недостаток устройства «заключается в том, что щель, выполняющая функцию приспособления для разворота рыбы, вызывает случаи ее застревания, число которых увеличивается при повышении скорости транспортирования, а также при наличии мелкой рыбы в смеси рыбного сырья. Обязательныг
Ё
VI VJ
со
ми условиями работы устройства являются отсутствие деформаций тушек рыбы и значительных угловых смещений хвоста относительно горизонтальной плоскости.
Цель изобретения - повышение надежности работы устройства за счет исключения случаев застревания или прохождения рыбы хвостом вперед.
Поставленная цель достигается тем, что устройство, содержащее лродуктопровод с маневровым участком, имеющим приспособление АЛЯ разворота рыбы, снабжено датчиком положения рыбы, установленным на входе продуктопровода, и блоком управления, при этом приспособление для разворота рыбы представляет собой плоскую воронку с подсоединенными к ней магистралями вакуума и давления и установленными на них клапанами, на входе и выходе маневрового участка установлена пара задвижек; датчик положения рыбы подключен к входу блока управления, а выходы последнего - к каждой задвижке и каждому клапану.
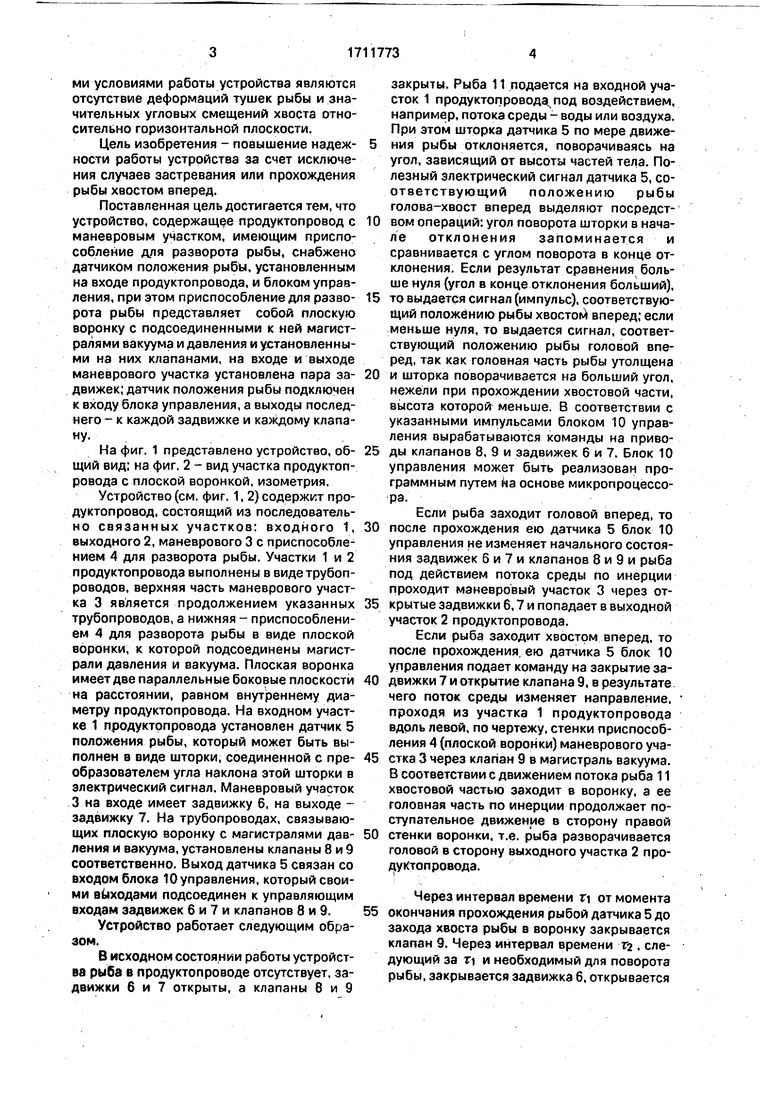
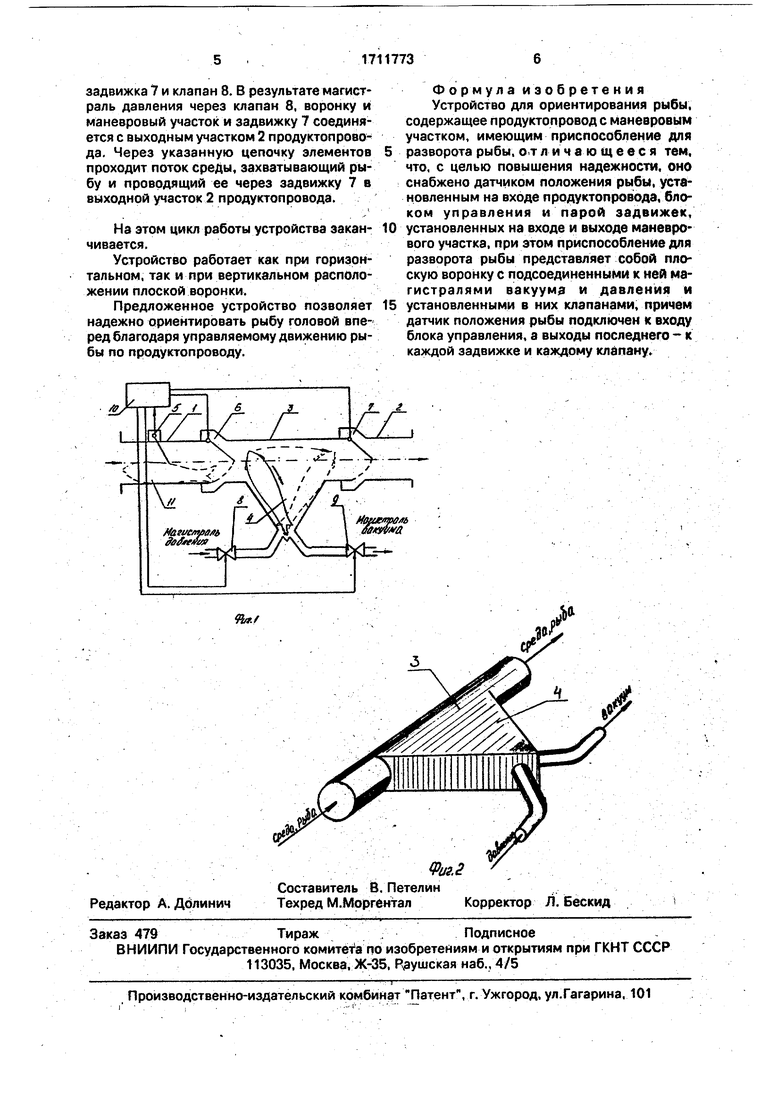
На фиг. 1 представлено устройство, общий вид; на фиг. 2 - вид участка продуктопровода с плоской воронкой, изометрия.
Устройство (см. фиг. 1, 2) содержит про- дуктопровод, состоящий из последовательно связанных участков: входного 1, выходного 2, маневрового 3 с приспособлением 4 для разворота рыбы. Участки 1 и 2 продуктопровода выполнены в виде трубопроводов, верхняя часть маневрового участка 3 является продолжением указанных трубопроводов, а нижняя - приспособлением 4 для разворота рыбы в виде плоской воронки, к которой подсоединены магистрали давления и вакуума. Плоская воронка имеет две параллельные боковые плоскости на расстоянии, равном внутреннему диаметру продуктопровода. На входном участке 1 продуктопровода установлен датчик 5 положения рыбы, который может быть выполнен в виде шторки, соединенной с преобразователем угла наклона этой шторки в электрический сигнал. Маневровый участок 3 на входе имеет задвижку 6, на выходе - задвижку 7. На трубопроводах, связывающих плоскую воронку с магистралями давления и вакуума, установлены клапаны 8 и 9 соответственно. Выход датчика 5 связан со входом блока 10 управления, который своими выходами подсоединен к управляющим входам задвижек 6 и 7 и клапанов 8 и 9.
Устройство работает следующим образом.
В исходном состоянии работы устройства рыба в продукте про воде отсутствует, задвижки 6 и 7 открыты, а клапаны 8 и 9
закрыты. Рыба 11 подается на входной участок 1 продуктопровода. под воздействием, например, потока среды - воды или воздуха. При этом шторка датчика 5 по мере движения рыбы отклоняется, поворачиваясь на угол, зависящий от высоты частей тела. Полезный электрический сигнал датчика 5, соответствующий положению рыбы голова-хвост вперед выделяют посредством операций: угол поворота шторки в начале отклонения запоминается и сравнивается с углом поворота в конце отклонения. Если результат сравнения больше нуля (угол в конце отклонения больший},
то выдается сигнал (импульс), соответствующий положению рыбы хвостом вперед; если меньше нуля, то выдается сигнал, соответствующий положению рыбы головой вперед, так как головная часть рыбы утолщена
и шторка поворачивается на больший угол, нежели при прохождении хвостовой части, высота которой меньше. В соответствии с указанными импульсами блоком 10 управления вырабатываются команды на приводы клапанов 8, 9 и задвижек 6 и 7. Блок 10 управления может быть реализован программным путем на основе микропроцессора.
Если рыба заходит головой вперед, то
после прохождения ею датчика 5 блок 10 управления не изменяет начального состояния задвижек б и 7 и клапанов 8 и 9 и рыба под действием потока среды по инерции проходит маневровый участок 3 через открытые задвижки 6,7 и попадает ъ выходной участок 2 продуктопровода.
Если рыба заходит хвостом вперед, то после прохождения, ею датчика 5 блок 10 управления подает команду на закрытие задвижки 7 и открытие клапана 9, в результате чего поток среды изменяет направление, проходя из участка 1 продуктопровода вдрль левой, по чертежу, стенки приспособления 4 (плоской воронки) маневрового участка 3 через клапан 9 в магистраль вакуума. В соответствии с движением потока рыба 11 хвостовой частью заходит в воронку, а ее головная часть по инерции продолжает поступательное движение в сторону правой
стенки воронки, т.е. рыба разворачивается головой в сторону выходного участка 2 продуктопровода.
Через интервал времени ri от момента окончания прохождения рыбой датчика 5 до захода хвоста рыбы в воронку закрывается клапан 9. Через интервал времени Тг . следующий за TI и необходимый для поворота рыбы, закрывается задвижка 6, открывается
задвижка 7 и клапан 8. В результате магистраль давления через клапан 8, воронку и маневровый участок и задвижку 7 соединяется с выходным участком 2 продуктопрово- да. Через указанную цепочку элементов проходит поток среды, захватывающий рыбу и проводящий ее через задвижку 7 в выходной участок 2 продуктопровода.
На этом цикл работы устройства заканчивается.
Устройство работает как при горизонтальном, так и при вертикальном расположении плоской воронки.
Предложенное устройство позволяет надежно ориентировать рыбу головой вперед благодаря управляемому движению рыбы по продуктопроводу.
Формулаизобретения Устройство для ориентирования рыбы, содержащее продуктопровод с маневровым участком, имеющим приспособление для
разворота рыбы, от ли чающееся тем, что, с целью повышения надежности, оно снабжено датчиком положения рыбы, установлен н ы м на входе п родуктопровода, бло- ком управления и парой задвижек,
установленных на входе и выходе маневрового участка, при этом приспособление для разворота рыбы представляет собой плоскую воронку с подсоединенными к ней магистралями вакуума и давления и
установленными в них клапанами, причем датчик положения рыбы подключен к входу блока управления, а выходы последнего - к каждой задвижке и каждому клапану
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИНА МЕСТОРОЖДЕНИЯ УГЛЕВОДОРОДНОГО СЫРЬЯ | 2010 |
|
RU2453687C1 |
| СПОСОБ УПРАВЛЕНИЯ СКВАЖИНОЙ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2367785C1 |
| СПОСОБ УПРАВЛЕНИЯ СКВАЖИНОЙ ГАЗОВОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2367789C1 |
| СПОСОБ УПРАВЛЕНИЯ СКВАЖИНОЙ НЕФТЕГАЗОВОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2367790C1 |
| СПОСОБ УПРАВЛЕНИЯ СКВАЖИНОЙ ГАЗОКОНДЕНСАТНОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2367784C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ УПРАВЛЕНИЯ СКВАЖИНОЙ НЕФТЕГАЗОВОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2367771C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ УПРАВЛЕНИЯ СКВАЖИНОЙ ГАЗОКОНДЕНСАТНОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2352758C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ УПРАВЛЕНИЯ СКВАЖИНОЙ ГАЗОВОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2367770C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ УПРАВЛЕНИЯ СКВАЖИНОЙ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 2008 |
|
RU2365737C1 |
| ГАЗОКОНДЕНСАТНАЯ СКВАЖИНА | 2008 |
|
RU2352760C1 |
Изобретение относится к рыбообработке. Цель изобретения - повышение надежности. Устройство для ориентирования рыбы содержит продуктопровод с маневровым участком, имеющим приспособление для разворота рыбы, представляющее собой плоскую воронку с магистралями вакуума и давления с установленными в них клапанами, пару задвижек на входе и выходе маневрового участка, датчик положения рыбы и блок управления. 2 ил.
-т-V f бугг
Irrlf Г
..%-fv- - - f.- Л / Lj.- -
V
Редактор А. Долинич
Фиг.2
Составитель 6. Петелин Техред М.МоргенталКорректор Л. Бескид
A
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
