концевой датчик 4, регистрирующий предельное нижнее положение больной конечности, ключи 5-9, блоки 10-12 выделения сигнала (например полосовые фильтры), блоки 13 и 14 дифференцирования, блоки 15-18 выделения максимальных значений, блоки 19 и 20 вычитания, пороговые элементы 21 и 22, элементы ИЛИ 23 и 24, формирователь 25 прямоугольного импульса (например, триггер с одним устойчивым состоянием), блоки 26 и 27 формирования сигнумгфункции (например, компараторы), компаратор 28, пороговый элемент 29, блок 30 формирования модуля, счетчики 31 и 32, блоки 33 и 34 определения скорости нажатия (делители), блок 35 запуска и останова, таймер 36 и регистратор 37.
При этом последовательно включенные датчик 4 и ключ 5, а также датчик 3 и ключ 6 образуют, соответственно, блоки 38 и 39 регистрации конечного положения больной конечности и колебаний больной конечности (при движении).
Последовательно соединенные датчик 2 и ключ 7, а также датчик 1 и ключ 8 образуют, соответственно, блоки 40 и 41 регистрации перемещения одной и другой конечностей,
Последовательно соединенные блок 10, пороговый элемент 29, компаратор 28, блок 30 формирования модуля и элемент ИЛИ 24 образуют блок 42 суммирования.
Блок 43 формирования стимулирующего сигнала включает а себя два параллельных канала, первый из которых содержит блоки 13 и 14 дифференцирования, выходами своими соединенные через блоки 15 и 16 с входами блока 19 вычитания, выход которого через пороговый элемент 21 подключен к первому входу элемента ИЛИ 23, выход которого через формирователь 25 прямоугольного импульса и ключ 9 соединен с злектростимулятором (не показан). Второй канал блока 43 содержит блоки 17 и 18 выделения максимальных значений, выходы которых соединены с входами блока 20 вычитания, вход которого через пороговый элемент 22 подключен к второму входу элемента ИЛИ 23. Между компаратором 26 (27) и счетчиком 31 (32) включены, соответственно, диоды 48 (49).
Устройство работает следующим образом.
Сигналы XI и Х2 с датчиков перемещений 1 и 2, соответственно, правой и левой ноги через замкнутые ключи 7 и 8 поступают на фильтры 11 и 12, где осуществляется сглаживание сигналов. Далее с помощью блоков 13 и 14 осуществляется операция дифференцирования сигналов xi и Х2. С помощью блоков 15-18 вычисления максимальных значений перемещения ног осуществляется выделение максимальных значеdxi d Х2
(блоки 15 и 16), XI
НИИ сигналов
dt dt
и Х2 (блоки 17 и 18) и вычитание соответствующих максимальных значений (блоки 19 и 20). В Ьлучае превышения соответствующих разностей пороговых значений, установленных на блоках 21 и 22, сигналы поступают на вход логического элемента ИЛИ (блок 23) и далее - на формирователь 25 прямоугольного импульса, который через ключ 9 подается к электростим лятору (5).
Количество нажатий одной ноги m и другой П2 определяется с помощью следующих вычислительных цепочек: фильтр 12 компаратор 26 - диод 48 - счетчик 31 (для вычисления hi); фильтр 11 - компаратор 27 - диод 49 - счетчик 32 (для вычисления П2). Диоды 48 и 49 служат для выделения однополярного импульса. На блоки деления 33 и 34 поступают сигналы с соответствующих счетчиков 31 и 32 и текущие значения времени выполнения упражнения t с таймера 26. При этом вычисляются средние значения нажатий соответствующих ног за время выполнения упражнения
,
П2
П2 СР
Информация о колебаниях больной ноги, которые возникают при ее чрезмерных напряжениях, с датчика колебаний 3 через
ключ 6 и через фильтр 10 поступает на пороговый элемент29. В случае превышения амплитуды колебаний заданного порогового значения сигнал через компаратор 28 поступает на блок 30 выделения модуля колебаНИИ (он необходим для получения однополярной функции), с выхода которого поступает на выход логического элемента ИЛИ 24, на второй выход которого подается через ключ 5 сигнал с концевого датчика 4.
Концевой датчик 4 выдает сигнал, запрещающий подавать сигнал электростимуляции на ногу, находящуюся в нижнем конечном положении.
При наличии сигнала на выходе элемента ИЛИ 24 ключ 9 находится в разомкнутом состоянии и сигнал запуска электростимулятора не подается на электростимулятор.
Ключи 5-8 управляются сигналами с выхода блока 33 запуска и останова.
Данные, обработанные блоками 13 и 14 дифференцирования, фильтрами 11 и 12, счетчиками 31 и 32, блоками 33 и 34 деления и счетчиками 36 времени фиксируются блоком 39 регистрации.
Устройство работает следующим образом.
Датчики 1 и 2 укрепляются нз ступнях человека, если это сейсмодатчики, или на коленном Ьуставе, если это потенциометрические гониометры. Концевой датчик 4 крепится либо на раме устройства, либо на гониометре больной ноги. Датчик 3 колебаний крепится на больной ноге. Указанные датчики связаны с устройством, которое заключено в единый корпус, размером примерно 100 X 200 X 100 мм . Это устройство устанавливается на раме на уровне лица больного.
Устройство осуществляет срочную оценку пе{ емещения конечностей; скорости перемещения конечностей; количества, перемещений конечностей за время трени ровки; времени тренировки; количества перемещений конечностей в единицу времени.
Устройство формирует и выдает на электростимулятор запускающий сигнал для электростимуляции нужных мышц конечности.
Формула изобретения 1. Устройство для тренировки мышц нижних конечностей человека, содержащее последовательно соединённые блок регистрации перемещения одной конечности, первый блок выделения сигнала, последовательно соединенные блок регистрации перемещения другой конечности и второй блок выделения сигнала, таймер, регистратор, блок суммирования и соединенные с его входам блок регистрации конечного положения больной конечности и блок регистрации колебаний больной конечности, блок запуска и останова, соединенный с блоками регистрации перемещения одной и другой конечностей, конечного положения больной конечности, колебаний больной конечности и с таймером, отличающееся тем, что, с целью
повышения точности контроля и управления процессом тренировки нижних конечностей человека, в него введены блок формирования стимулирующего сигнала,
входы которого подключены к выходам блока суммирования и первого и второго блоков выделения сигнала, и два параллельных канала, включающих последовательно соединенные блоки формирования сигнум-функций, диоды, счетчики, блоки определения скорости нажатия, при этом входы параллельных каналов соединены с соответствующими выходами первого и второго блоков выделения сигнала, выход таймераподключен к вторым входам блоков определения скорости нажатия, а входы регистратора соединены с выходами блока суммирования, блока формирования стимулирующего ciiirнала, первого и второго блоков выделения
Ьигнала, счетчиков, таймера и блоков определения скорости нажатия.
2. Устройство по п.1,отличающеес я тем, что блок формирования стимулирующего сигнала содержит на входе два параллельных канала, первый из которых включает в себя два блока дифференциро. вания, выходы которых через первый и второй блоки выделения максимальных значений соединены с входами первого блока вычитания, выход которого через первый пороговый элемент подключен к первому входу элемента ИЛИ, второй канал включает в себя третий и четвертый блоки выделения максимальных значений, входы которых
соединены с входами блоков дифференцирования и являются первым и вторым входами блока формирования стимулирующего сигнала, а выходь) подключены к входам второго блока вычитания, выход которого
через второй пороговый элемент соединен с вторым входом элемента ИЛИ, выход которого через последовательно соединенные формирователь прямоугольного импульса и ключ подключены к электростимулятору.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛАВНОСТИ ХОДА ГУСЕНИЧНЫХ МАШИН ПРИ ОБУЧЕНИИ ВОЖДЕНИЮ | 1997 |
|
RU2113015C1 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| Автоматические весы | 1986 |
|
SU1364892A1 |
| Тренажер телеграфиста | 1987 |
|
SU1418800A1 |
| СПОСОБ УПРАВЛЕНИЯ МЫШЕЧНЫМ НАСОСОМ КРОВИ И ЭЛЕКТРОСТИМУЛЯТОР МЫШЕЧНОГО НАСОСА КРОВИ (ВАРИАНТЫ) | 1992 |
|
RU2070060C1 |
| Устройство для обучения и контроля двигательных действий спортсмена | 1990 |
|
SU1745207A1 |
| Система для тренинга адаптационных механизмов личности с биологической обратной связью и сенсомоторной стимуляцией | 2022 |
|
RU2786311C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНТЕРВАЛА ВРЕМЕНИ УДЕРЖАНИЯ СТАТИЧЕСКОГО РАВНОВЕСИЯ ЧЕЛОВЕКА В ОРТОГРАДНОЙ ПОЗЕ | 2015 |
|
RU2577945C1 |
| Тренажер телеграфиста | 1989 |
|
SU1601620A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ВРЕМЕНИ ИСПОЛЬЗОВАНИЯ ДИСПЛЕЙНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355123C2 |
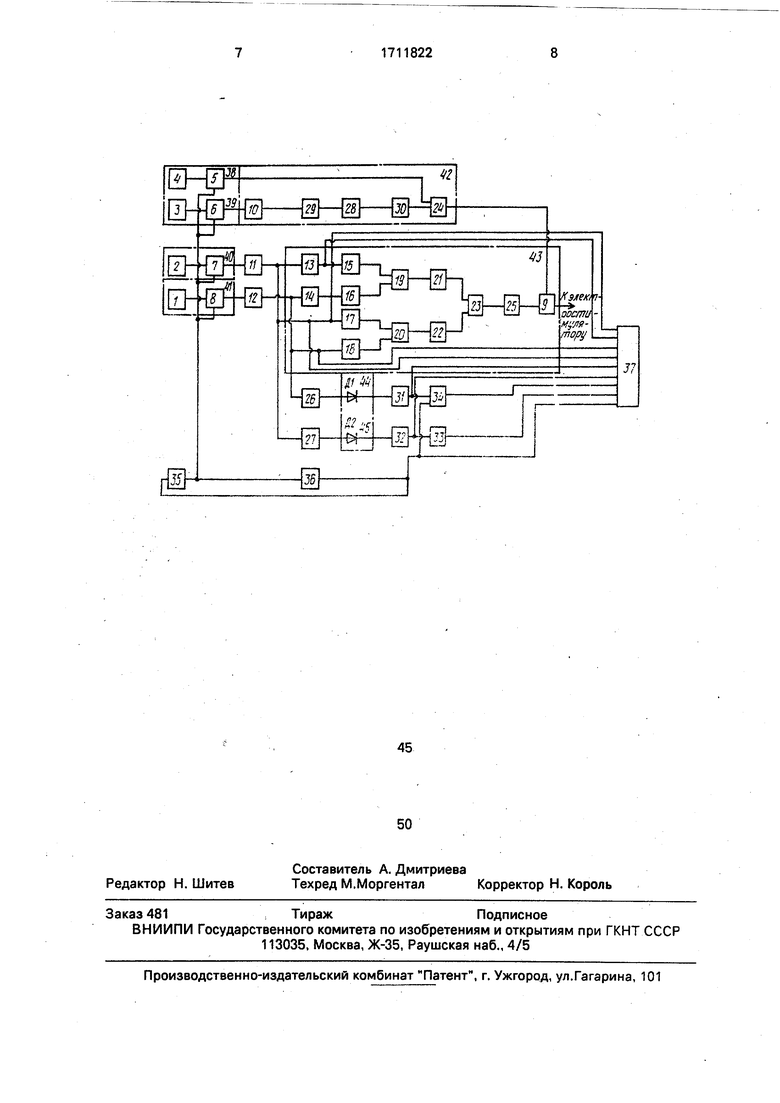
Изобретение относится к медицине и позволяет повысить точность контроля и управления процессом тренировки мышц нижних конечностей человека и восстановления лимфо- и кровообращения в процессе реабилитации после перенесенных травм и заболеваний. Имеющиеся четыре канала обеспечивают передачу данных о перемещении здоровой ноги, передачу данных больной ноги, передачу данных о колебаниях больной ноги и о конечном положении больной ноги. Полученные даннь1е обрабатываются и выдается информация, необходимая для оперативного контроля иуправления движениями больной ноги. Установив время выполнения упражнения и задав человеку режим выполнения этого упражнения, устройство включается и осуществляется обработка данных, по истечении времени выполнения упражнения происходит автоматический останов обработки данных. Блок регистрации информирует как о текущих, как и о конечных результатах обра- ббтки данных в виде числовых и графических значениях. Устройство содержит датчики 1 и 2 перемещений, датчик 3 колебаний больной конечности, концевой датчик, ключи 5-9, фильтры 10-12, блоки 13 и 14 дифференцирования, блоки 15-18 выделения максимальных значений, блоки 19-и 20 вычитания, пороговые элементы 21, 22, 29, элементы ИЛИ 23 и 24, формирователь 25 прямоугольного импульса, компараторы 26-28, блок 30 формирования модуля, счетчики 31 и 32, блоки 33 и 34.определения скорости нажатия, блок35 запуска и останова, таймер 36, регистратор 37, блоки 38 и 39 регистрации конечного положения больной конечности, блоки 40 и 41 регистрации перемещения одной и другой ноги, сумматор 42, блок 43 формирования стимулирующего сигнала, детекторы 44 и 45. 1 э.п.ф-лы, 1 ил.слс00ю юИзобретение относится к медицинской технике и может быть использовано в спорте и медицине для тренировки мышц, например, с целью восстановления в-них лимфо- и кровообращения в процессе реабилитации по заданной программе, а также для получения информации для оперативного контроля в процессе тренировки.Цель изобретения -,повышение точности контроля и управления процессом тренировки нижних конечностей.На чертеже предсталена структурная электрическая схема устройства.Устройство содержит датчики 1 и 2 перемещений, например, потенциометриче- ские или сейсмодатчики, датчик 3 колебаний больной конечности (при перемещении).
| Устройство контроля положения тела спортсмена | 1984 |
|
SU1194432A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
