Изобретение относится к области криогенной техники, используемой для биологических и медицинских исследований, а именно к устройствам для программного замораживания биологических материалов, например клеточных культур гамет и зигот млекопитающих, микроорганизмов и т.д.
Целью изобретения является повышение сохранности биомэтериалов при замораживании путем повышения точности регулирования процесса программного замораживания.
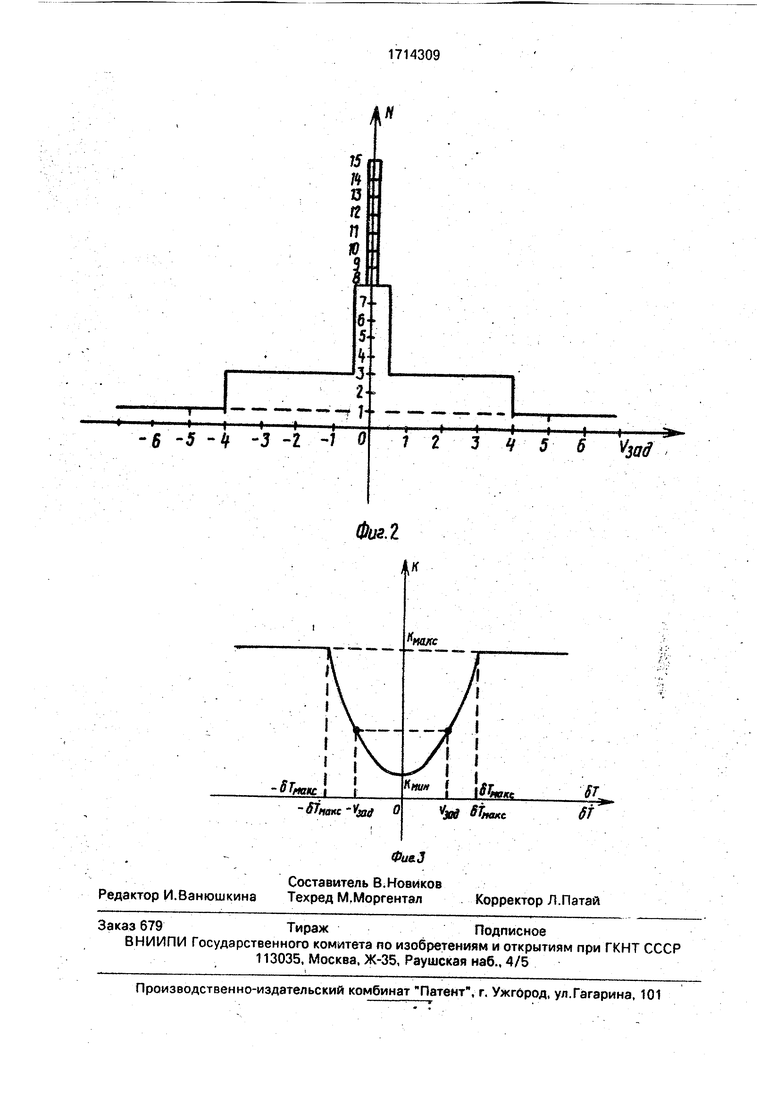
На фиг. 1 представлено устройство для замораживания биоматериалов, блок-схема; на фиг. 2 и 3 - графики, иллюстрирующие работу устройства.Предложенное устройство содержит камеру 1 замораживания с размещеннь1ми в ней контейнерами с биоматериалом (не показаны), в одном из. которых установлен датчик 2 температуры, выход которого через дифференцирующий блок 3 пЬдключен к первому входу первого.блока 4 сравнения, второй вход которого соединен с выходом первого задающего блока 5, выход датчика 2 температуры прдключен к входу третьего блока 6 сравнения, другой вход которого соединен с выходом блока 7 интегрирования. Выход третьего блока 6 сравнения через второй дифференцирующий блок 8 и третий блок 9 совпадений подключен к блоку 7 интегрирования, другой вход которого подсоединен ко второму выходу первого задающего блока 5. Выход задатчика 10 режима подключен к второму входу третьего блока 9 совпадений. Вход задания начальных условий блока 7 интегрирования соединен с выходом второго задающего блока 11. Другой выход третьего блока 6 сравнения подключен к первому входу блока 12 суммирования, другой вход которого соединен с выходом блока 13 опорного сигнала.
Выход блока 12 суммирования через второй демодулятор 14 подключен к входу первого компаратора 15 и к входу первого .задающего блока 5 и второго компаратора 16, первый вход которого подключен к нулевой шине. Выход первого блока 4 сравнения через первый демодулятор 17 подсоеду1нен к первому вхрду делителя 18, другой вход которого соединен с выходом первого задающегоблока 5. Выход делителя 18че}5ез нормирующий усилитель 19 подсоединен к первому входу второго блока 20 еравненйя. причем вторые входы нормирующего усидителя 19 и второго блока 20 сравнения подключены к выходу первого задающего блока 5.
Выход второго блока 20 сравнения подсоединен к входу генератора 21 пилообразного напряжения, первый выход которого
подключен к входу первого компаратора 15, а второй выход генератора 21 пилообразного напряжения к второму входу блока 22 формирования периода управления, первый вход которого подсоединен к выходу первого.задающего блока 5. Выход первого компаратора 15 подключен к входам первого и второго блоков 23 и 24 совпадений, другие входы которых подсоединены соответственно к выходу второго компйратора 16 и к выходу инвертора 25, вход которого подсоединен к выходу второго компаратора 16,3 третьи входы первого и второго блоков 23 и 24 совпадений подключены к выходу блока 22 формирования периода управления.
Выходы блоков 23 и 24 совпадений подсоединены соответственно к входам исполнительных устройств 26 и 27, причем регулирующим органом в исполнительном устройстве 26 может быть, например, элек-ь тромагнитный клапан, обеспечивающий подачу хладагента (жидкого азота) в камеру 1 замораживания. Регулирующим образом исполнительного устройства 27 может слу-жить нагреватель, размещенный в камере 1 замораживания.
Устройство работает следующим образом. .. .
Сигнал, пропорциональный текущему значению температуры в контейнере, поступает с выхода датчика 2 температуры на первый вход tpeTbero блокаб сравнения, на Другой вход которого подается сигнал с выхода блока 7 интегрирования в виде линейно-изменяющегося напряжения, угол наклона которого пропорционален заданной скорости /зад охлаждения контейнера с биоматериалом, поступающей в виде заданного напряжения с выхода первого задающего блока 5 на второй вход блока 7 интегрирования. Единичный сигнал с выхода задатчика 10 режима поступает на второй вход третьего блока 9 совпадений. Сигнал установки начального значения линейно-изменяющегося напряжения на вы)оде блока 7 интегрирования поступает с выхода второго задающего блока 11 на вход задания начальных условий блока 7 интегрирования..
На выходе блока б сравнения формируется сигналя рассогласования д Т пропорциональный разности между заданным и текущим значениями температуры. В начальный момент времени д Т 0. Этот сигнал с первого выхода блока 6 сравнения nocTynaiST «и вход дифференцирующего блока 8, «а выходе которого формируется . сигнал ОШИ0КИ пЬ скорости А V определяемый выражением
AV d/dt(T3afl,-T), где Т - текущая температура,
Тзад - Заданная температура.
Этот сигнал через третий блок 9 совпадений поступает на первый вход блока 7 интегрирования, обеспечивая дополнительную коррекцию сигнала рассогласования 5 Т по скорости, так как знак сигнала А V в начальные моменты совпадает со знаков) заданной скорости VaaA, формируемой на выходе п ервого задающего блока 5, что автоматически приводит к увеличению задающего сигнала на выходе блоки 7 интегрирования и к увеличению сигнала рассогласования б Т на вь1ходе блока 6 сравнения. Одновременно, сигнал бТс второго выхода блока 6 сравнения поступает на первый вход блока 12 суммирования, на второй вход которого поступает сигнал Don с выхода блока 13 опорного сигнала, величина которого соответствует величине зоны нечувствительности исполнительного органа,...
На выходе блока 12 суммирования формируется суммарный сигнал ошибки dTi определяемый выражением ATi 5T+Uon.
В начальный момент времени А Ti ирп; введение сигнала Uon в блок 12 суммирования обеспечивает смещение рабочего диапазона исполнительного Органа на величину зоны нечувствительности исполнительного органа что приводит к уменьшению времени переходного процесса и статической ошибки на участке установившегося процесса программного замораживания биоматериалов. Сигна;л dTi с выхода блока 12 суммирования поступает на второй демодулятор 14, на выходе которого формируется положительныйсигналдТа величина которого пропорциональна модулю:
(5Т2 iaTi I. .
в начальный момент времени б Та IUon I. Сигнал (ЗТгс второго выхода блока 12 суммирования поступает на вход первого задающего блока 5, чем обеспечивается коррекция сигнала (заданной скорости) на выходе первого дающего блокаб, что приводит к увеличению быстродействия процесса перехода с участков малых программных cкopdcтeй на участки больших программных скоростей. Увеяичение -быстродействия процессов происходит .за счет совпадения знаков сигнала б Ti на выходе блока 12 суммирования и сит нала Узад. на выходе задающего блока 5, что приводит автоматически к увеличению коэффициента усиления всего тракта управления.
Кроме того, сигнал б Ti с выхода блока 12 суммирования поступает на второй вход второго компаратора 16, обеспечивая выбор нужного исполнительного органа (в,начальный момент - исполнит1эльное устройство 26). Сигнал д Ti, построенный оптимальным образом, с выхода второго демодулятора Т4 поступает на первый вход первого компаратора 15, на другой вход которого поступает с выхода генератора 21 пилообразного напряжения сигнал оптимальной амплитуды, сформированный подключенными к выходу датчика 2 температуры, последовательно связанными, первым дифференцирующим блоком 3, первым блоком 4 сравнения, первым демодулятором 17, делителем 18, нормирующим усилителем 19, вторым блоком 20 сравнения и генератором 21 пилообразного напряжения.
Сигнал с выхода датчика 2 температуры, пропорциональный текущему значению температуры, поступает на вход первого дифференцирующего блока 3, выходной
сигнал которого, пропорциональный скорости изменения температуры, поступает на первый блок 4 сравнения, на другой вход которого подается с выхода первого задающего блока 5 сигнал Узад., пропорциональный заданному значению скорости охлаждения или отогрева. На выходе блока 4-формируется сигнал б Т определяемый выражением .,
.бT Vзaд-V,
где V - текущая скорость замораживания биоматериала.
Этот сигнал поступает на первый демодулятор 17, на выходе которого формируется положительный сигнал бТ, величина
которого пропорциональна модулюб Т. Сигнал б TI поступает на один вход делителя 18-, на другой.вход которого подается сигнал VaaA. с выхода задающего блока 5. Выходной сигнал делителя 18 определяется выражением
I Узад - V I
б
V
зад
Этот сигнал поступает через нормирующий усилитель 19. коэффициент усиления которого определяется выражением
Кнф. КУзадч
причем 0 К 1, в виде сигнала U. вычисляемого по формуле
I Узад - V I
и К-Узад.
V:
зад
поступает на один вход второго блока 20 сравнения, на другой вход которого поступает сигнал.-пропорциональный задающему сигналу Узад. с выхода задающего блока 5. , ,,,,
На выходе блока 20 сравнения формируется напряжение Ui. пропорциональное разности сигналов Узад. и U. При этом, поскольку в начале процесса программного замораживания V О, то сигнал 5 Т имеет максимальное значение, близкое к Vзaд1 а сигнал 5 - 1 , т.е. U имеет некоторре максимальное значение. При этом сигнал Ui на выходе блока 20 сравнения минимален, что обеспечивает формирование на выходе генератора 21 пилообразного напряжения сигнала оптимальной минимальной амплитуды. Этот сигнал, поступая на другой вход компаратора 15. обеспечивает появление на его выходе импульсов большой длительности.
Кроме того, импульсь синхронизации со второго выхода генератора 21 пилообразного напряжения поступают на второй вход блока 22 формирования периода управления, на первый вход которого поступает сигнал Узад., пропорциональный заданной скорости, с выхода задающего блока 5, Сформированный на выходе блока 22 формирования периода управления сигнал поступает на третьи входы блоков 23 и 24 совпадений, обеспечивая подключение выбранного исполнительного органа в определенные моменты времени Nnep., задаваемые блоком 22 формирования периода управления и кратные периоду генератора 21 пилообразного напряжения.
С выхода компаратора 15 импульсы оптимальной большой длительности; поступают на первые входы блоков 23 и 24 совпадений, чем обеспечивается поступление выходных импульсов в начальные моменты на исполнительный орган 26, осуществляющий подачу в камеру 1 заморажирания хладагента, например, азота. Камера начинает охлаждаться, при этом скоррсть охлаждения увеличивается. Сигнал 5 Т на выходе блока 4 сравнения начинает уменьшаться, что приводит в конечном счете к увеличению сигнала Ui на выходе блока 20 сравнения и увеличению амплитуды выходного сигнала генератора 21 пилообразного напряжения. Сигнал д Т на выходе блока 6 сравнения в это время увеличивается, приводя к увеличению сигнала 5Т2 на первом входе компаратора 15.
Таким образом, увеличение амплитуды выходного сигнала генератора 21 пилообразного напряжения, поступающего на второй бход компаратора 15. и увеличение сигнала д Та поступающего на первый вход компаратора 15, вызывает дополнительное.
за счет увеличения крутизны пилообразного напряжения генератора 21 пилообразного напряжения, уменьшение длительности импульсов на выходе компаратора 15, а значит дополнительное уменьшение подачи хладагента в камеру 1 замораживания. При достижении, а затем и превышении текущей скорости замораживания значения заданной программной скорости замораживания сигнал 5Т на выходе блока 6 сравнения изменит знак на противоположный. Это вызовет отключение блока 23 совпадений, так как на его вторим входе появится нулевой сигнал, и появление на втором входе блока 24 совпадений единичного сигнала, обеспечив подключение исполнительного органа 27, т.е. подключение нагревателя к камере замораживания..
Камера начнет отогреваться, при этом скорость охлаждения контейнеров с биоматериалом начнет уменьшаться и под действием нагревателя снова достигнет заданного программного значения. С момента установления в контейнере заданной программной скоростц замораживания сигналы ошибки d Т и (5 Т на выходах блока 6 сравнения и блока 4 сравнения соответственно под действием оптимального алгоритма устройства устанабливаютсятакими. которые обеспечивают замораживание бирматериала с заданной скоростью. Если в процессе регулирования скорость замораживания будет отклоняться от заданной, то это вызовет изменение знака сигнала рассогласования (ЗТ на выходе блока 6 сравнения, обеспечив выбор и подключение нужного исполнительного органа для устранения этого отклонения.
Таким образом, в предложенном уст; ройсТве коэффициент усиления регулятора является функцией не т.олько от сигналов рассогласования д Т и д Т. но и от крутизны пилообразного напряжения, длительности периода управления и ошибки по скорости замораживания. В режиме стабилизации температуры используется это же устройство без введения новых признаков. Чтобы это устройство использовэть в режиме стабил|изации температуры в заданной .точке температурного поля, необходимо с выхода задающего блока 5 на второй вход блока 7 интегрирования подать программное значение скорости, равное нулю, а с выхода второго задающего блока 11 подать на вход устанЬвХ14 начального значения блока 7 интегрирования Сигнал установки заданной те14пературы стабилизации, а на выходе задатчмка 10 режима установить нулевой сигнал для отключения дифференцирующего блока 8 от первого входа блока 7 интегрирования.
Сформированный на выходе блока 22 формирования периода управления сигнал поступает на третьи входы блоков 23 и 24 совпадений, обеспечивая подключение выбранного исполнительного органа в определенные моменты времени, задаваемые блоком 22 формирования периода управления. В режиме стабилизации температуры все процессы в устройстве протекают аналогично, как и при стабилизации скорости изменениятемпературы биоматериала.
Улучшение качества стабилизации на участках переходного и установившегося процесса в режиме стабилизации температуры обеспечиваетбя за счет смещения рабочего диапазона исполнительного органа на величину зоны нечувствительности исполнительного органа и оптимального алгоритма устройства, обеспечивая получение отклонения текущей температуры от заданной на участке перерегулирования не более 3%, а в установившемся режиме не более 2%. Высокий уровень оптимизации гтроЦессов программного замораживания биоматёриалов в широком диапазоне скоростей 0,1-100°С/мин на участках стабилизации скорости и на участках стабилизации температуры в любой заданной точке температурного поля (от до -160°С) дает возможность использовёть устройство для программного замораживания биоматерйалов как в реальных условиях, так и в научноисследовательских целях, и повысить сохранность биоматериалов при замораживании,.:
Формула изобретения
Устройство для замораживания биоматериалов, содержащее камеру замора живания с датчиком температуры, подключенным к последовательно соединенным первому дифференцирующему блоку, первому блоку сравнения, первому демодулятору, делителю, нормируиащем усилителю, второму блоку сравнения, генератору пилообразного напряжения, лерво±
му компаратору, первому блоку совпадений, первому исполнительному устройству, выход которого соединен с камерой замораживания, а также первый задающий блок,
выход которого соединен с первым блоком сравнения, входами делителя, нормирующего усилителя и второго блока сравнения, последовательно соединенные второй компаратор, первый вход которого соединен с
нулевой шиной, а выход подключен ко второму входу первого блока совпадений, инвертор, второй блок совпадений, второй вход которого подключен к выходу первого компаратора, второе исполнительное устройство, выход которого соединен с кайерой замораживания, о т л и ч а ю щ е е с я
тем, что, с целью повышения сохранности
биоматериалов при замораживании путем
повышения точности регулирования процесса программного замораживания, оно снабжено последовательно соединенными ретьим блоком сравнение, первый вход которого подключен к датчику температуры, блоком суммирования, выход которого Лодключен к первому задающему блоку .и второму входу второго компаратора, вторым демодулятором, выход которого соединен со вторым входом первого компаратора, а также последовательно соединенными вторым дифференцирующим блоком, вход которого соединен с вторым выходом третьего блока сравнения, третьим блоком совпадения, блоком интегрирования, выход которого соединен с вторым входом третьего блока
сравнения, второй вход-с выходом первого задающего блока, блоком опорного сигнала, вторым задающим блоком, задатчиком режима, выходы которых подключены соответственно к второму входу блока суммирования, третьим входом блока интегрирования, вторым входом третьего блока совпадения и блоком формирования периода управления, первый вход которого соединен с выходом первого задающего
блока, второй вход-с вторым выходом генератора пилообразного напряжения, а выход - с третьими входами первого и второго блоков сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для замораживания биоматериалов | 1990 |
|
SU1709158A1 |
| Устройство для замораживания биоматериалов | 1991 |
|
SU1784808A1 |
| Устройство для замораживания биоматериалов | 1982 |
|
SU1044098A1 |
| Устройство для программного замораживания биообъектов | 1987 |
|
SU1455184A1 |
| Устройство для программного замораживания ядросодержащих клеток биоматериала | 1978 |
|
SU789668A1 |
| Устройство для моделирования импульсного частотно-фазового дискриминатора | 1986 |
|
SU1354218A1 |
| Фотоэлектрическое следящее устройство | 1978 |
|
SU746447A1 |
| Преобразователь постоянного напряжения в переменное заданной формы | 1977 |
|
SU748737A1 |
| Функциональный генератор | 1976 |
|
SU643909A1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
Изобретение может быть использовано в криогенной технике, а именно в устройствах для программного замораживания биологических материалов. Цель изобретения - повышение сохранности биоматериалов. Устройство содержит камеру 1 замораживания, датчик 2 температуры, устёновленный в одном из контейнеров с биоматериалом и подключенный через дифференцирующий блок 3 к первому входу блока 4 сравнения,задающий блок 5, подсоединенный к второму входу блока 4 сравнения, к выходу последнего подключены последовательно связанные демодулятор 17, делитель 18, нормирующий усилитель 19, второй блок 20 сравнения, генератор 21 пилообразного напряжения, первый компаратор 15, первый блок 23 совпадений и первый исполнительный орган 26, подсоединенный к камере 1 замораживания, подключенные к первому выходу второго компаратора 16 последовательно связанные инвертор 25. второй блок 24 совпадений, второй исполнительный орган 27, подключенный к камере 1 замораживания, задатчик 10 режима, блок 13 опорного сигнала. Кроме того, оно содержит блок формирования периода управления, на вход которого подключен генератор пилообразного напряжения, при этом вход последнего соединен с выходом первого задающего блока, а входы блоков совпадения подключены к выходу блока 22 формирования периода управления, 3 ил.^*^^1^Сл>& Ою>&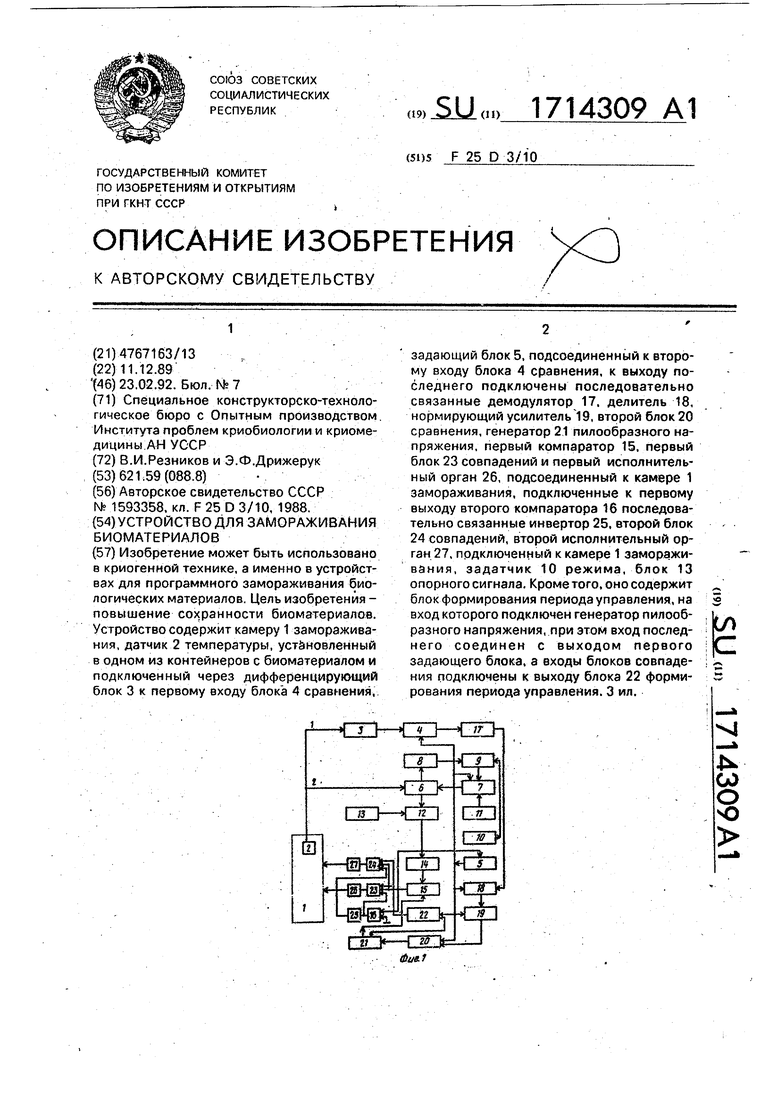
| Авторское свидетельство СССР № 1593358, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
