Изобретение относится к медицинской криогенной технике, а точнее к устройствам для программного замораживания биологических материалов, например клеточных культур, гамет и зигот млекопитающих, микроорганизмов и т.д.
Целью изобретения является повышение сохранности биоматериалов при замораживании.
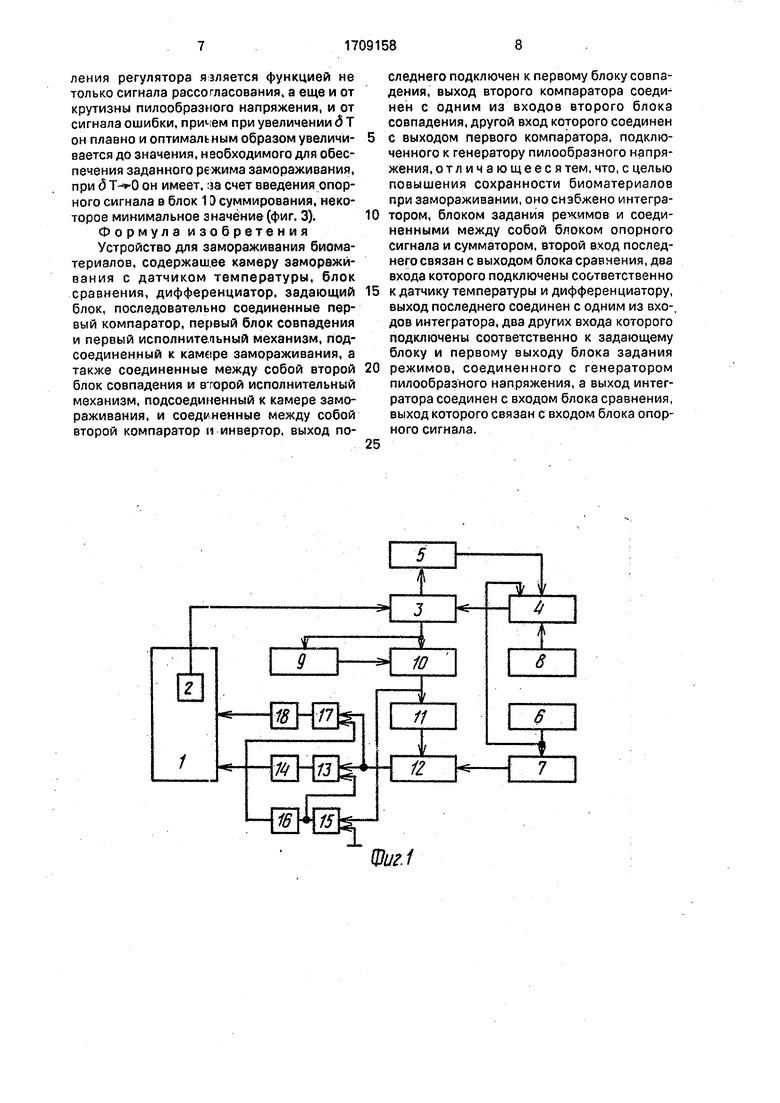
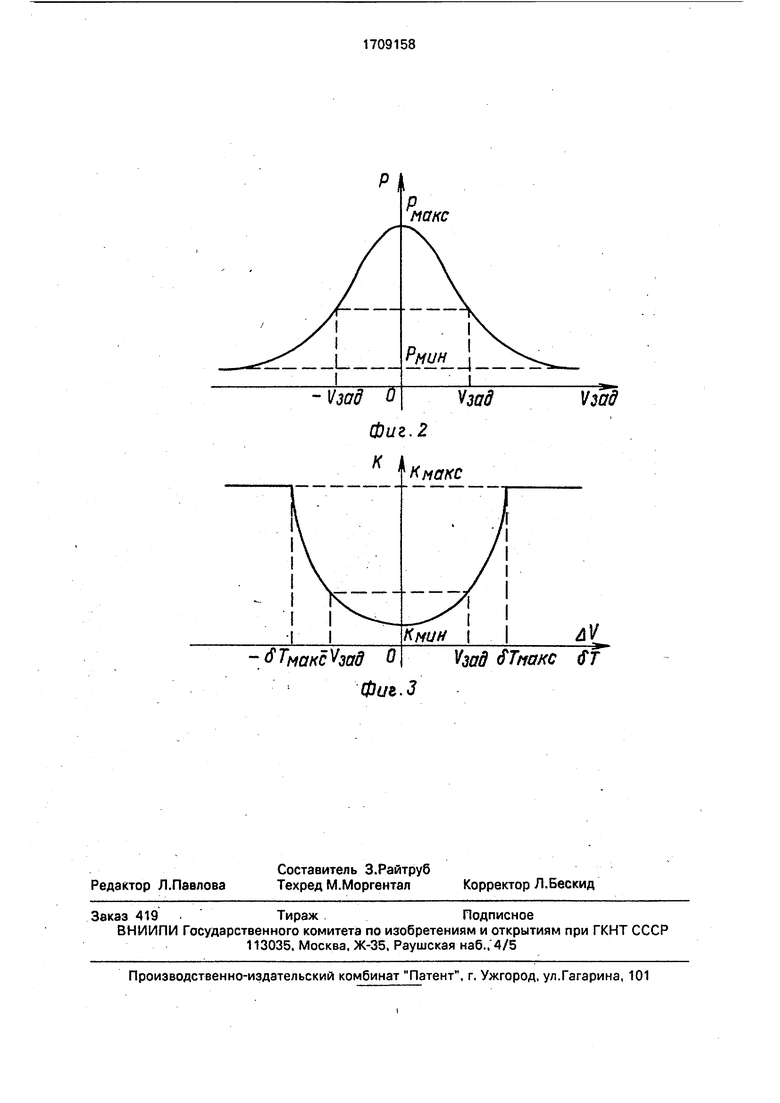
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - график, выражающий зависимость максимальной амплитуды генератора пилообразного напряжения от величины заданной программной скорости; на фиг, 3 - зависимость козффициента усиления устройства от сигналов ошибки по температуре и скорости.
Устройство содержит (фиг. 1) камеру 1 замораживания с размещенными в ней контейнерами с биоматериалом (не показаны), в одном из которых установлен датчик 2 температуры, подключенный к одному входу блока 3 сравнения, блок 4 интегрирования, подсоединенный к второму входу блока 3 сравнения, дифференцирующий блок 5, подключенный к первому выходу блока 3 сравнения, блок 6 задания режимов, подсоединенный к входу генератора 7 пилообразного напряжения и к второму входу блока 4 интегрирования, первый вход которого подключен к выходу дифференцирующего блока 5, задающий блок 8, подсоединенный к входу задания начальной температуры блока 4 интегрировании, блок 9 опорного сигнала, вход которого подключен к второму выходу блока 3 сравнения, а выход блока 9 опорного сигнала подсоединен к второму входу блока 10 суммирования, первый вход которого подключен к второму выходу блока 3 сравнения, демодулятор 11, подсоединенный к выходу блока 10 суммирования, подключенные к выходу демодулятора 11 последовательно связанные первый компаратор 12, первый блок 13 совпадений, первый исполните льный механизм 14, подсоединенный к камере 1 замораживания, подключенные к выходу блока 10 суммирования последовательно связанные второй компаратор 15, инвертор 16, второй блок 17 совпадений, второй исполнительный механизм 18, пидсоединенный к камере 1 замораживания. При этом выход генератора 7 пилообразного напряжения подсоединен к второму входу первого компаратора 12, выход первого компаратора 12 подключен к первому входу второго блока 17 совпадений, а втэрой вход второго компаратора 15 подсоединен к нулевой шине. Регулирующим органом в исполнительном механизме 14 может быть, например, электромагнитный клапян, обеспечивающий подачу хладагента (жидкого азота) в камеру 1 замораживания. Регулирующим органом исполнительного механизма 18 может служить нагреватель, размещенный в камере 1 замораживания. Причем первый контур автокорреки.ии сигнала ошибки регулирования образуется последовательно связанным блоком Ci сравнения, дифференцирующим блоком 5 и блоком 4 интегрирования. Этот контур предназначен для усиления сигнала регулирования на выходе блока 3 сравнения на участках переходного процесса за счет совпадения на фазе сигнала ошибки по скорости с выхода дифференцирующего блока 5, и сигнала заданной скорости с выхода блока 6 задания режимов, поступающих на первый и второй входы соответственно блоки 4 интегрирования. На участках установившегося процесса этот контур не влияет на сигнал регулирования в виду малости ошибки регулирования. Второй контур автокорэекции сигнала ошибки регулирования образуется последовательно связанными бло ом 3 сравнения, блоком 9 опорного сигнала и блоком 10 суммирования. Этот контур предназначен для смещения рабочего диапазона клапана на величину зоны нечувствительности клапана, чем обеспечивается значительное уменьшение ошибск стабилизации как на
участках переходного процесса, так и на участках установившегося процесса. Третий контур автокоррекции сигнала ошибки регулирования (внешний) образуется за счет последовательно связанных блока 6 задания режимов и генератора 7 пилообразного напряжения. Этот контур предназначен для формирования амплитуды генератора 7 пилообразного напряжения в зависимости от
to величины заданной программной скорости, чем обеспечивается точность регулирования в широком диапазоне скоростей.
Предлагаемое устройство работает следующим образом.
15 Сигнал, пропорциональный текущему значению температуры (Т), поступает с дат-, чика 2 температуры на один вход блока 3 сравнения, на другой вход которого поступает линейно изменяющийся сигнал (ТЗ) с
20 выхода блока 4 интегрирования, на второй вход которого поступает сигнал, пропорци-. ональный заданной скорости (Узад.) охлаждения с выхода блока 6 задания режимов, а на вход задания начальной температуры
25 блока 4 интегрирования поступает сигнал (ТЗнзч.), пропорциональный заданной начальной температуре, с выхода задающего блока В. На выходе блока 3 сравнения формируется сигнал д Т, пропорциональный
30 разности между заданным линейно изменяющимся и текущим значениями температуры.
бт тз-т,
35 где сигнал ТЗ определяется выражением
Т3, J Узад dt + ТЗнач. + Д V,
/50 где ит - текущее время;
Д V - сигнал ошибки по скорости (в начале процесса он равен нулю).
Этот сигнал с первого выхода блока 3 сравнения через дифференцирующий блок 45 5, выходной сигнал которого определяется выражением
ДУ(ТЗ-Т)
где Д V - сигнал ошибки по скорости; п-г - символ дифференцирования;
поступает на первый вход блока 4 интегрирования, на выходе которого рбразуется сигнал ТЗ, скорректированный и усиленный на величину, пропорциональную сигналу ошибки по Скорости Д V с выхода дифференцирующего блока 5. Одновременно сигнал (5т со второго выхода блока
3 сравнения поступает на первые входы блока 9 опорного сигнала и блока 10 суммирования. На выходе блока 10 суммирования образуется си гнал дТ1, скорректированный на величину Uon и определяемый выражением
дТ1 д Т + Uon,
где Uon - сигнал, пропорциональный величине зоны нечувствительности клапана. Этот сигнал через второй компаратор 15, на выходе которого за счет сравнения с нулевым сигналом образуется единичный сигнал, поступает на второй вход первого блока 13 совпадений, обеспечивая этим выбор исполнительного механизма, т.е. клапана. Одновременно сигнал 5 Т1 через демодулятор (детектор) 11, выходной сигнал которого Определяется выражением
(5Т2(,
где д Т2 - положительный сигнал, пропорциональный модулю 6 Т1, поступает на первый вход первого компаратора 12, на второй вход которого поступает сигнал с выхода генератора 7 пилообразного напряжения, на вход которого поступ-аетс выхода блока 6 задания режимов сигнал Узад., пропорциональный величине заданной скорости замораживания и обеспечивающий формирование на выходе генератора 7 пилообразного сигнала заданной крутизны. Зависимость максимальной амплитуды генератора 7 пилообразного напряжения (Р) от величины заданной скорости (Узад.)-приведена на фиг. 2, Импульсы с выхода компаратора 12 через блок 13 совпадений поступают на исполнительный механизм 14, чем обеспечивается подача в камеру 1 замораживания хладагента, например жидкого азота. Камера начинает охлаждаться, при этом скорость охлаждения увеличивается. Сигнал (5т начинает увеличиваться в связи с ростом амплитуды генератора 7 пилообразного напряжения, ростом заданного линейно изменяющегося сигнала ростом ошибки Д V, что в соответствии с изложенным выше приведет к увеличению сигнала (3 Т2 и длительности импульсов на выходе первого компаратора 12, что в свою очередь вызовет увеличение подачи хладагента в камеру 1 замораживания. При достижении текущей скорости замораживания значения заданной программной скорости замораживания длительность импульсов на выходе первого компаратора 12 установится такой, которая обеспечит заданный режим замораживания, т.е. замораживания с заданной программной скоростью. Plpi, этом при превышении текущей температурой Т значения заданной темперэтуры ТЗ
изменится знак сигнала ошибки {) Т, что вызовет появление сиг1-з. на оыходе вюрого компаратора 15 и нз аходе первого блока 13 совпадений и появление С1, единица на выходе инвертора 16 i; на
входе второго блока 17 совпадений, что вызовет отключение исполнительного механизма 14 и подключение исполнительного механизма 18, т.е. нагревателя. Для перехода в режим стабилизации температуры в
заданной точке температурного поля необходимо с блока б задания режима;.) по/,.:-:;.. сигнал нуль на второй вход блока s интегрирования и на вход генератора .7 пилсииразного напряжения, что вызовет установку
заданной соответствующей крутиз;: : гог-з ратора 7 пилообразного напряжен : ((риг, 2 VI переход блока 4 интегрирссаиия в ре-п;.стабилизации установленной iег-.;iepfnуры. Сигнал на выходе блока А иитег и1;о;.-а;и)К в
этом случае будет описываться следую;--;-.;. выражением:
T3 -i3ycT + AV.
где ТЗуст т установившаяся в момз):т цср;::ключения температура.
Установившийся характер СРГНЭЛО ТЗ на выходе блока 4 интегрировзния вс.педс вие инерционнссти камеры и контсПнсроь
вызовет в начальный момент вре;.;ени прообладание текущей темг:ературь: Т 1-;ад уста и о в и в ш е и с я те Г-- п е PI а т у р о и Т 3, ч т о вызовет пояплени.е отрицательного сигнала д Т (о Т 0) на выходе блока 3 срапне я.
что приведет в соответств ::; с изложенным выше к появлен11 о сигнала едши. на входе второго блока 17 совпадений и подключению второго исполнительного (механизма 18, т.е. нагревателя. Камера начг-ет
отогреваться, скорость охл :сдсн;1я, за счет введенных м описанных ранее контуров автокоррекций, начнет резко уменьшаться, и в момент достижения текуи.1ей температурой Т значения заданной устакооле 1ной
температуры ТЗусг. д.пптельность пмпульсо. на выходе первого компаратора ;2 усгановится такой, которая обеспечит зада 1:;ый режим замораживани.ч, т.е. стабилизацию устаиовленной температуры. Причем изменение знака сигнала о Т будет вызывать соглас -10 изложенному подключение нужноЕо исполнительно.го механизма к камере 1 замораживания. Таким образом, в предлагаемом устройстве коэффициент усиления регулятора язляется функцией не только сигнала рассогласования, а еще и от крутизны пилообразного напряжения, и от сигнала ошибки, причем при увеличении 6 Т он плавно и оптимальным образом увеличивается до значения, необходимого для обеспечения заданного режима замораживания, при 5 он имеет. :за счет введения опорного сигнала в блок 1Э суммирования, некоторое минимальное значение (фиг. 3). Формула изобретения Устройство для замораживания биоматериалов, содержащее камеру замораживания с датчиком температуры, блок сравнения, дифференциатор, задающий блок, последовательно соединенные первый компаратор, первый блок совпадения и первый исполните1ьный механизм, подсоединенный к камере замораживания, а также соединенные между собой второй блок совпадения и второй исполнительный механизм, подсоединенный к камере замораживания, и соед|/ ненные между собой второй компаратор и инвертор, выход последнего подключен к первому блоку совпадения, выход второго компаратора соединен с одним из входов второго блока совпадения, другой вход которого соединен
с выходом первого компаратора, подключенного к генератору пилообразного напряжения, о тличающееся тем, что, с целью повышения сохранности биоматериалов при замораживании, оно снабжено интегратором, блоком задания режимов и соединенными между собой блоком опорного сигнала и сумматором, второй вход последнего связан с выходом блока сравнения, два входа которого подключены соответственно
к датчику температуры и дифференциатору, выход последнего соединен с одним из вхо-, дов интегратора, два других входа которого подключены соответственно к задающему блоку и первому выходу блока задания
режимов, соединенного с генератором пилообразного напряжения, а выход интегратора соединен с входом блока сравнения, выход которого связан с входом блока опорного сигнала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для замораживания биоматериалов | 1989 |
|
SU1714309A1 |
| Устройство для замораживания биоматериалов | 1991 |
|
SU1784808A1 |
| Устройство для моделирования импульсного частотно-фазового дискриминатора | 1986 |
|
SU1354218A1 |
| Устройство для замораживания биоматериалов | 1982 |
|
SU1044098A1 |
| Устройство для программного замораживания биообъектов | 1987 |
|
SU1455184A1 |
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU978111A1 |
| Система программного управления | 1978 |
|
SU815714A1 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Устройство для несимметричного управления мостовым широтно-импульсным преобразователем | 1980 |
|
SU907757A1 |
Фиг.
1зад о Фиг. 2
(C
Тмакс зад О
V30d
Узад
Узад Тпакс (f Г Фиъ.З
| Устройство для замораживания биоматериалов | 1982 |
|
SU1044098A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
