Изобретение относится к области криогенной техники, используемой для-биологических и медицинских исследований, а точнее к устройствам для программного замораживания биологических материалов, например, бактериальных и клеточных культур, тамет и зигот млекопитающих, микроорганизмов и т.д.
Известны устройства для программного замораживания биоматериалов, содержащие камеры замораживания с контейнерами для размещения биоматериала, систему снабжения хладагента и систему автоматического управления по скорости и по температуре процессом замораживания биоматериалов.
В этих устройствах качество процессов программного замораживания на участках стабилизации скорости и температуры обеспечивается за счет плавного и оптимального изменений коэффициента усиления всего тракта управления.
Недостатком этих устройств является сложный характер нахождения оптимальных параметров настройки этих устройств.
В качестве прототипа выбрано устройство для замораживания биоматериалов, содержащее камеру замораживания с датчиком температуры, подключенным к последовательно соединенным первому блоку сравнения, линейному задатчику температуры, задатчику начальной температуры, а также дифференцирующий блок, вход которого соединен с датчиком температуры, а выход с вторым блоком сравнения, генератор пилообразного напряжения, подключенный к последовательно соединенным первому компаратору, первому блоку совпадений, первому исполнительному устройству, выход которого соединен с камерой замораживания, второй компаратор, второй вход которого соединен с нулевой шиной, а выход подключен к второму входу первого блока совпадений и к последовательно соеел
С
vj оо
-N
00
о
00
диненным первому инвертору, второму блоку совпадений, первый вход которого соеди- нен с выходом первого компаратора, второму исполнительному устройству, выход которого соединен с камерой замораживания, блок формирования периода управления, второй вход которого соединен с вторым выходом генератора пилообразного напряжения, а выход соединен с входами первого и второго блоков совпадений, за- датчик скорости, выход которого соединен с вторым блоком сравнения, а также входами линейного задатчика температуры, блока формирования периода управления. При этом необходимо отметить, что второй блок сравнения используется по новому назначению, т.е. в основном контуре управления, а не в корректирующей цепи.
Недостатками этого устройства являются сложный характер нахождения оптимальных параметров настройки этих устройств. Это обусловлено сугубо нелинейными и нестационарными свойствами замкнутой системы управления в целом.
Цель изобретения - повышение сохранности биоматериалов при замораживании путем повышения точности регулирования процесса программного замораживания за счет: формирования управляющих импульсов постоянной длительности.
Поставленная цель достигается тем, что в устройство для замораживания биоматериалов, содержащее камеру замораживания с датчиком температуры, подключенным к последовательно соединенным первому блоку сравнения, линейному задатчику температуры, задатчику начальной температуры, а также дифференцирующий блок, вход которого соединен с датчиком температуры, а выход - с вторым блоком сравнения, генератор пилообразного напряжения, подключенный к последовательно соединенным первому компаратору, первому блоку совпадений, первому исполнительному устройству, выход которого соединен с камерой замораживания, второй компаратор, второй вход которого соединен с нулевой шиной, а выход подключен к второму входу первого блока совпадений и к последввательно соединенным первому инвертору, второму блоку совпадений, первый вход которого соединен с выходом первого компаратора, второму исполнительному устройству, выход которого соединен с камерой замораживания, блок формирования периода управления, второй вход которого соединен с вторым выходом генератора пилообразного напряжения, а выход соединен с входами первого и второго блока совпадений, задатчик скорости, выход которого соединен с вторым блоком сравнения, а также входами линейного задатчика температуры, блока формирования периода управления, дополнительно введены блок задания закона стабилизации, блок формирования длительности импульсов, второй инвертор, третий блок совпадений, третий и четвертый компараторы, при этом первый и второй входы блока задания закона стабилизации
подключены соответственно к выходам второго и первого блоков сравнения, третий вход соединен с выходом задатчика скорости, а выход подключен к первому входу второго компаратора, вход блока формирования длительности импульсов подключен к выходу задатчика скорости, а его первый и второй выходы подсоединены соответственно к первым входам первого и третьего компараторов, второй вход третьего компаратора подключен к первому выходу генератора пилообразного напряжения, а его выход к первому входу третьего блока совпадений, второй вход которого подсоединен к выходу четвертого компаратора,
третий вход подключен к выходу блока формирования периода управления, четвертый вход подсоединен к выходу первого инвертора, а выход третьего блока совпадений подключен к первому входу первого исполнительного устройства, вход четвертого компаратора подсоединен к выходу задатчика скорости, а его выход через второй инвертор подключен также к четвертому входу второго блока совпадений. При этом
необходимо также отметить, что введенные новые существенные признаки обеспечивают в целом формирование управляющих им- пульсов постоянной длительности, использование на участках стабилизации
скорости для сглаживания процесса стабилизации по скорости и температуре вместо нагревателя - холодового воздействия меньшей интенсивности, а также использование на участках стабилизации малых скоростей ( 1°/мин) закона стабилизации не по ошибке скорости, а по ошибке температуры, что вызвано значительными ошибками дифференцирующего блока из-за соизмеримости амплитуд его сигналов с
уровнем помех и наводок, что все в целом в свою очередь обеспечивает качество и стабильность регулируемых параметров процесса стабилизации и повышение сохранности биоматериалов при замораживании.
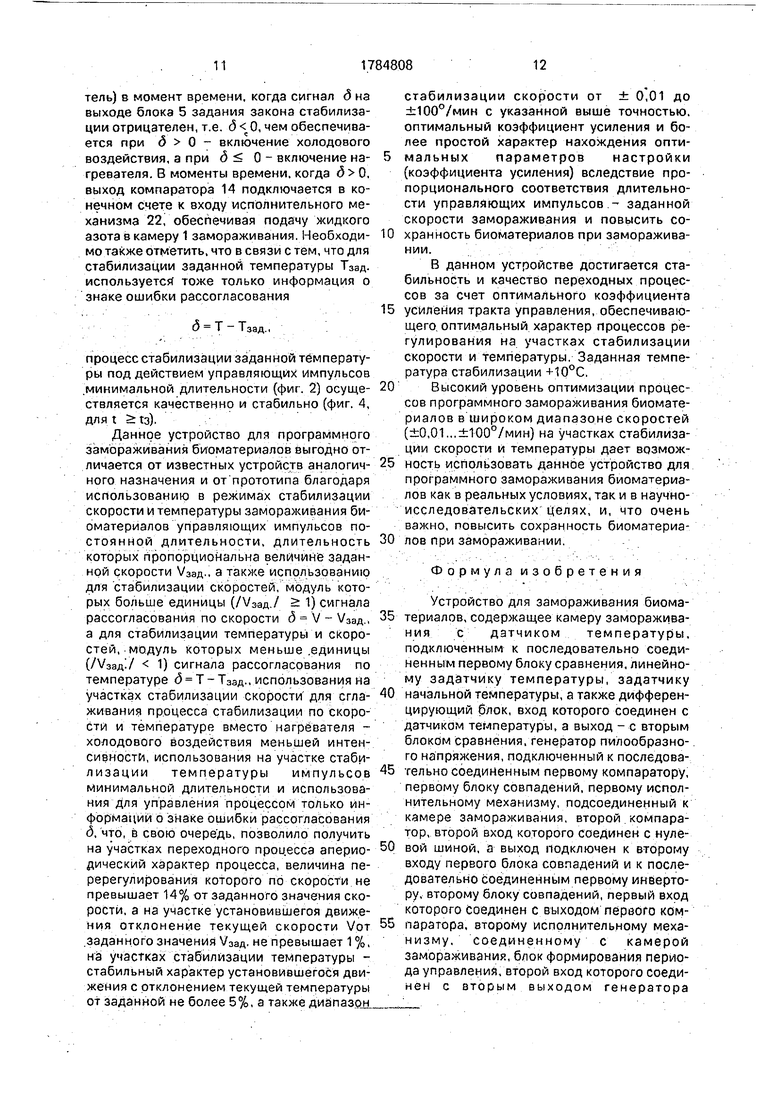
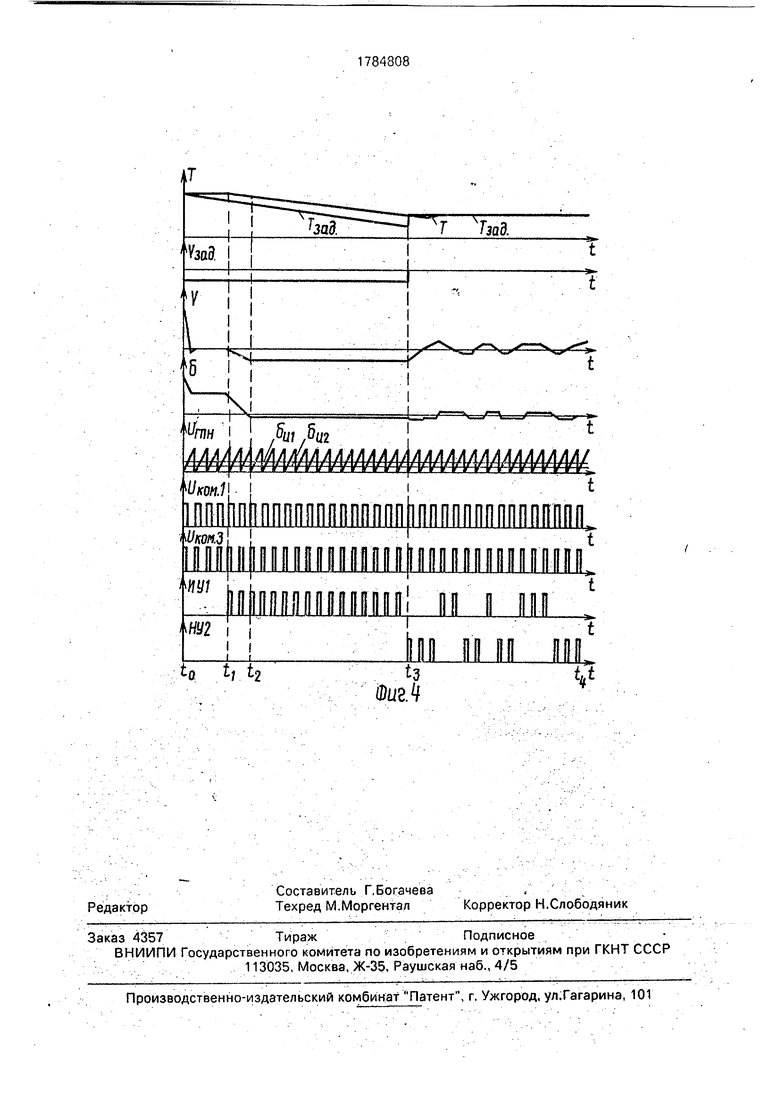
На фиг. 1 представлена блок-схема предложенного устройства для замораживания биоматериалов на фиг 2, 3 и 4 графики, иллюстрирующие работу этого устройства
Предложенное устройство содержит камеру 1 замораживания с размещенными в ней контейнерами с биоматериалом, в одном из которых установлен датчик 2 температуры, выход которого через дифференцирующий блок 3 и второй блок 4 сравнения подключен к первому входу блока 3 задания, выход датчика 2 температуры также подключен к первому входу первого блока 6 сравнения, выход которого подсоединен к второму входу блока 5 задания закона стабилизации, а второй вход через линейный задатчик 7 температуры подключен к выходу задатчика 8 начальной температуры.
Выход задатчика 9 скорости подключен к первым входам блока 10 формирования длительности импульсов, блока 11 формирования периода управления и четвертого компаратора 12, к вторым входам блока 4 сравнения и линейного задатчика 7 температуры и к третьему входу блока 5 задания, выход которого подсоединен к первому входу второго компаратора 13, другой вход которого подключен к нулевой шине.
Первый выход блока 10 формирования длительности импульсов подсоединён к первому входу первого компаратора 14, а второй выход подключен к первому входу третьего компаратора 15
Первый выход генератора 16 пилообразного напряжений подсоединен к вторым входам первого и третьего компараторов 14 и 15, а второй выход подключен к второму входу блока 11 формирования периода управления.
Выход третьего компаратора 15 подсоединен к первому входу третьего блока 17 совпадений.
Выход первого компаратора 14 подсоединен к первым входам первого и второго блока 18 и 19 совпадений, вторые входы которых подключены соответственно к выходу второго компаратора 13 и к выходу первого инвертора 20, выход которого подсоединен к выходу второго компаратора 13.
Выход блока 11 формирования периода управления подключен к третьим входам первого, второго и третьего блока 18, 19 и 17 совпадений.
Выход четвертого компаратора 12 подсоединен к второму входу третьего блока 17 совпадений и через второй инвертор 21 к четвертому входу блока 19 совпадений.
Четвертый вход третьего блока 17 совпадений подключен к выходу первого инвертора 20, а его выход к первому входу первого исполнительного механизма 22.
Выходы блоков 18 и 19 совпадений подсоединены соответственно к входам исполнительных механизмов 22 и 23, причем регулирующим органом в первом исполнительном механизме 22 может быть, например, электромагнитный клапан, обеспечивающий подачу хладагента (жидкого азота) в камеру 1 замораживания Регулирующим органом второго исполнительного
механизма 23 может служить нагреватель, размещенный в камере 1 замораживания.
Устройство работает следующим образом.
Сигнал Т с выхода датчика 2 температуры, пропорциональный текущему значению температуры в контейнере, поступает на вход дифференцирующего блока 3, выходной сигнал которого, пропорциональный скорости изменения температуры, поступает на первый вход блока 4 сравнения, на другой вход которого подается с выхода задатчика 9 скоростей сигнал /зад, пропорциональный заданному значению скорости охлаждения или отогрева.
На выходе блока 4 сравнения формируется сигнал б V, определяемый выражением1
б V V - V:
30
зад
где V - текущая скорость замораживания биоматериала.
Этот сигнал поступает на первый вход блока 5 задания закона стабилизации
Одновременно, сигнал Т с выхода датчика 2 температуры, пропорциональный текущему значению температуры в контейнере, поступает на вход блока б сравнения, на другой вход которого подается
сигнал Тзад. с выхода линейного задатчика 7 температурой в виде линейно изменяющегося напряжения, угол наклона которого пропорционален заданной скорости Узэд охлаждения контейнеров с биоматериалом,
поступающий в виде заданного напряжения с выхода задатчика 9 скорости на второй вход линейного задатчика 7 температуры. На первый вход линейного задатчика 7 температуры с выхода задатчика 8 начальной температуры поступает сигнал установки начального значения ли- нейноизменяющегося напряжения на выходе линейного задатчика 7 температуры Сигнал рассогласования 5 Т, пропорциопальный разности между текущим Т и заданным Т3ад значениями температуры, определяемый выражением:
б Т Т - Т:
зад
поступает с выхода блока 6 сравнения на второй вход блока 5 задания закона стабилизации, на третий вход которого подается управляющий сигнал У3ад с выхода задатчи- ка 9 скорости.
На выходе блока 5 задания закона стабилизации, в зависимости от управляющего сигнала Узад.. формируется сигнал д , определяемый выражением:
( У-Узад.. при Л/зад/ Уо;
I Т-ТЗЛД1гфи/Уззд./ V0,
где V0 - заданный порог срабатывания по скорости, величина которого соответствует скорости 1°/мин.
В начальный момент времени 3 V - /3ад , кроме того 0 0, так как V О
И Узад. 0.
Этот сигнал поступает на первый вход второго компаратора 13, на выходе которого образуется единичный сигнал, чем обеспечивается появление положительного единичного сигнала на втором входе блока 18 совпадений и отрицательного единичного сигнала на втором входе блока 19 совпадений и в конечном счете выбор нужного исполнительного органа, т.е. электромагнитного клапана (исполнительный меха- низм 22).
На первые входы блоков 18, 19 и 17 совпадений поступают управляющие импульсы постоянной длительности с выхода первого компаратора 14 и третьего компа- ратора 15 соответственно, при этом длительность импульсов на выходе первого компаратора 14 пропорциональна величине заданной скорости Узад.. формируемой на выходе задатчика 9 скорости.
Рассмотрим формирование управляющих импульсов постоянной длительности на выходах первого компаратора 14 и третьего компаратора 15.
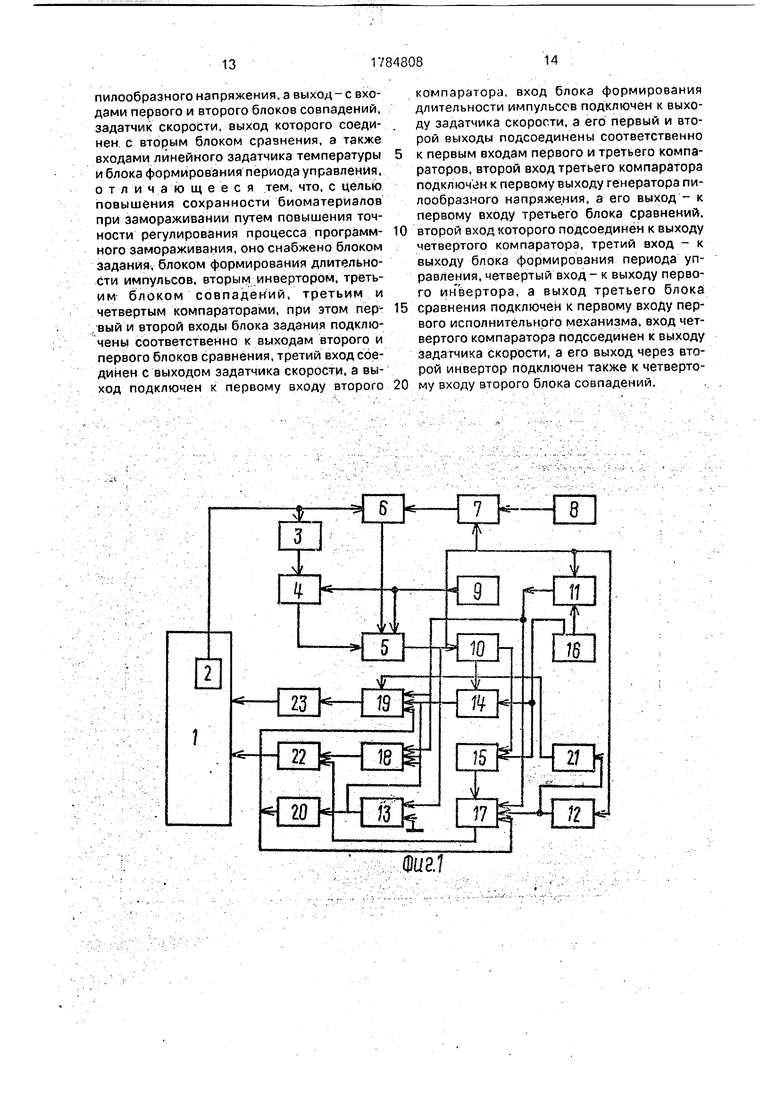
Сигнал Узад.. пропорциональный задан- ному значению скорости охлаждения или отогрева, формируемый на выходе задатчика 9 скорости, поступает на вход блока 10 формирования длительности импульсов, на первом и втором выходах которого форми- руются нормированные сигналы 5Й1 и д , причем сигнал д 1/Н пропорционален заданной скорости Узад. (фиг. 2).
. С выхода блока 10 формирования длительности импульсов сигнаяы дИт и д поступают на первые входы первого компаратора 14 и третьего компаратора 15 соответственно, на вторые входы которых с первого выхода генератора 16 пилообразного напряжения поступает пилообразное напряжение, угол наклона которого равен 45°, чем обеспечивается пропорциональная зависимость длительности управляющих импульсов на выходе компаратора 14 от величины заданной скорости /3ад , поступающей в виде сигнала Узад. на вход блока 10 формирования длительности импульсов с выхода задатчика 9 скорости.
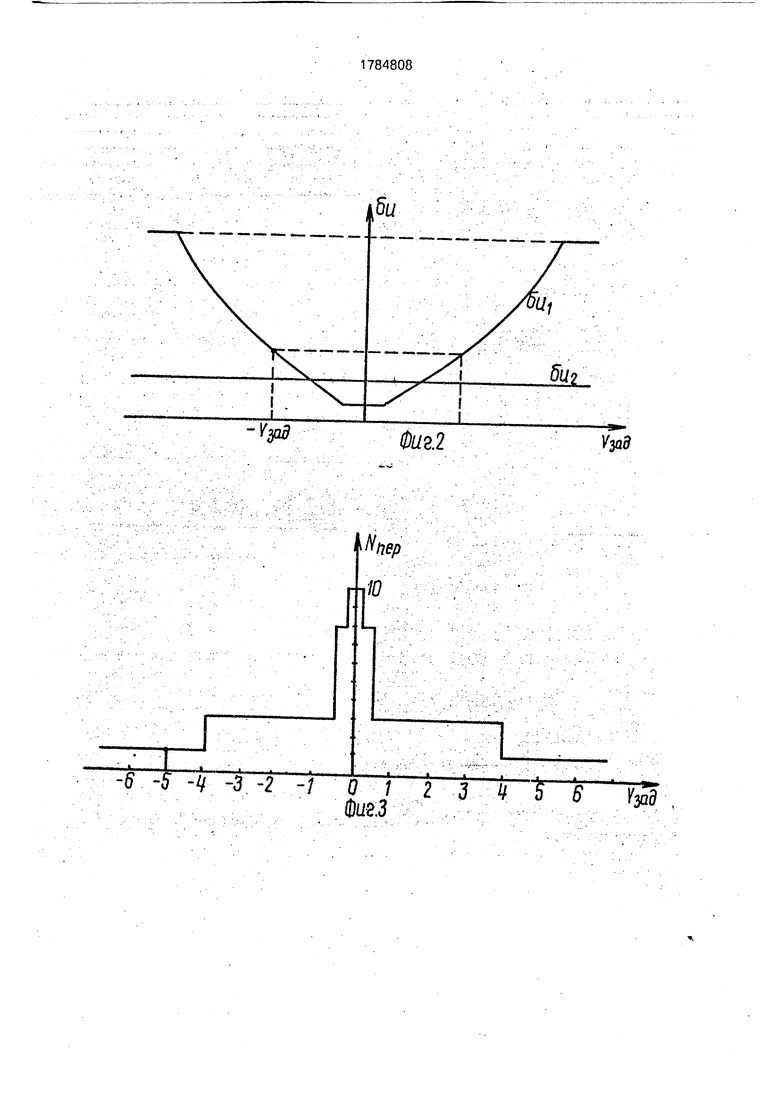
Кроме того, импульсы синхронизации со второго выхода генератора 16 пилообразного напряжения поступак№йа второй вход блока 11 формирования периода управления, на первый вход которого поступает сигнал Узад., пропорциональный заданной скорости, с выхода задатчика 9 скорости. Сформированный на выходе блока 11 формирования периода управления сигнал поступает на третьи входы блоков 18, 19 и 17 совпадений, обеспечивая подключение выбранного исполнительного механизма 22 в определенные моменты времени Nnep , задаваемые блоком 11 формирования периода управления и кратные периоду генератора 16 пилообразного напряжения (фиг. 3).
Управляющий сигнал Узад с выхода задатчика 9 скорости поступает также на вход компаратора 12, на выходе которого формируется единичный сигнал в зависимости от величины заданной скорости и описываемый выражением:
UK
1, При /Узад/ Vl -1, при /Узад/ Vt
где UK - сигнал на выходе компаратора 12;
Vi - порог срабатывания по скорости (0.01°С/мин).
В начальный момент времени UK 1. Этот единичный сигнал положительной полярности поступает на второй вход блока 17 совпадений и через инвертор 21, в виде отрицательной полярности, на четвертый вход блока 19 совпадений, чем обеспечивается отключение нагревателя (исполнительный механизм 23) в режиме стабилизации скорости и подключение вместо него исполнительного механизма 22, т.е. холодового воздействия (жидкий азот) меньшей эффективности, под действием управляющих импульсов, вырабатываемых на выходе компаратора 15,
На четвертый вход блока 17 совпадений поступает отрицательный единичный сигнал с выхода инвертора 20, чем исключается подключение управляющих импульсов с выхода компаратора 15 на вход исполнительного механизма 22 при сигнале рассогласования б 0.
Таким образом, появление управляющих импульсов постоянной длительности, сформированных на выходе компаратора 14, на выходе блока 18 совпадений и на входе исполнительного механизма 22 обеспечивает срабатывание электромагнитного клапана, осуществляющего подачу в камеру 1 замораживания хладагента, например, жидкого азота. Камера начинает охлаждаться, при этом скорость охлаждения увеличивается (фиг. 4). Сигнал д V на выходе блока
4сравнения уменьшается, при этом сигнал на выходе блока 5 задания сохраняется одного знака, т.е. д 0, что в соответствии с вышеизложенным приведет к срабатыванию только исполнительного механизма 22, осуществляющего подачу жидкого аз ота в камеру 1 замораживания (фиг. 4). В момент достижения текущей скорости замораживания V величины заданной скорости замораживания /3ад. сигнал д на выходе блока 5 задания закона стабилизации станет равным нулю, т.е. д - 0, а затем при превышении V над Уззд сигнал 5 станет отрицательным, т.е. б 0, что приведет к появлению на выходе компаратора 13 сигнала отрицательной полярности, обеспечивающего отключение от исполнительного механизма 22 управляющих импульсов с выхода компаратора 14, и подключение к нему управляющих импульсов с выхода компаратора 15, но значительно меньшей длительности, что, в свою очередь, приведёт к плавному уменьшению текущей скорости замораживания V и достижению заданного значения Узад Сигнал 5 0 на выходе блока
5задания закона стабилизации будет поддерживаться на всем участке стабилизации скорости замораживания за счет незначиГ- тельного преобладания V над 7зад, что обес- печит на участке установившегб ся движения управление импульсами постоянной и значительно меньшей длительности, чем на переходном участке, которые, ё СвЪю очередь, обеспечивают высокую стабильность текущей скорости замораживания на всем участке установившегося движения, которая, в свою очередь, позволяет повысить сохранность биоматериалов при замораживании на участке стабилизации скорости замораживания биоматериалов. При этом необходимо отметить, что исполнительный механизм 23, т.е. нагреватель, на участке стабилизации скорости не подключается, вместо него подключается исполнительный механизм 22, но управляемый
импульсами меньшей длительности, что обеспечивает сглаживание процесса стабилизации и стабильность процесса стабилизации в целом.
5Для стабилизации скоростей, меньших
по модулю едини Цы, т;е. /Уэад / 1, с выхода задатчика 9 скорости на третий вход блока 5 задания закона стабилизации подается сигнал Узад., величина которого по модулю
0 меньше единицы, что обеспечивается появление на выходе блока 5 задания закона стабилизации сигнала д , предварительно сформированного в виде б Т - Тзад.
Этот сигнал д положителен, так как те5 кущая температура Т преобладает над заданной температурой Т3ад. на всем участке стабилизации температуры из-за инерционного запаздывания холодового воздействия (фиг 4, 1), т.е. д 0, что обеспечивает, в
0 соответствии с вышеизложенным алгоритмом функционирования устройства, появление управляющих импульсов требуемой постоянной длительности с выхода компаратора 14 на входе исполнительного меха5 низма22, обеспечивающего подачу жидкого азота в камеру 1 замораживания, при этом необходимо отметить, что сформированная длительность управляющих импульсов обеспечивает стабильность и точность за0 данной скорости замораживания биоматериалов, при этом стабильность и точность скорости обеспечивается в основном за счет постоянства знака сигнала д на выходе блока 5 задания закона стабилизации и соот5 ветствия длительности управляющих импульсов заданной скорости замораживания Узад , формируемой на выходе задатчика 9 скорости.
Для перехода в режим стабилизации
0 температуры (фиг. 4, момент времени ts) с выхода задатчика 9 скорости подается сигнал /зад 0 и с выхода задатчика 8 начальной температуры сигнал заданной температуры стабилизации, что в соответст5 вии с вышеизложенным алгоритмом функционирования устройства приведет к появлению на вьГходе блока 5 задания закона стабилизации сигнала д, предварительно сформированного в виде
0
5 Т-ТЗЭд.
к появлению на выходе компаратора 12 единичного сигнала отрицательной полярно- 5 сти, что вызовет в конечном счете отключение выхода компаратора 15 от входа исполнительного механизма 22 и подключение выхода компаратора 14 к входу исполнительного механизма 23 (нагреватель) в момент времени, когда сигнал 5 на выходе блока 5 задания закона стабилизации отрицателен, т.е. б 0, чем обеспечивается при 6 0 - включение холодового воздействия, а при 6 0 - включение нагревателя. В моменты времени, когда д О, выход компаратора 14 подключается в конечном счете к входу исполнительного механизма 22, обеспечивая подачу жидкого азота в камеру 1 замораживания. Необходимо также отметить, что в связи с тем, что для стабилизации заданной температуры Тзад. используется тоже только информация о знаке ошибки рассогласования
д Т - Т
зад.,
процесс стабилизации заданной температуры под действием управляющих импульсов .минимальной длительности (фиг. 2) осуществляется качественно и стабильно (фиг. 4, для t гз).
Данное устройство для программного замораживания биоматериалов выгодно отличается от известных устройств аналогичного назначения и от прототипа благодаря использованию в режимах стабилизации скорости и температуры замораживания биоматериалов управляющих импульсов постоянной длительности, длительность которых пропорциональна величине заданной скорости /зэд., а также использованию для стабилизации скоростей, модуль которых больше единицы (/Узад./ S 1) сигнала рассогласования по скорости д V - Узад, а для стабилизации температуры и скоростей, модуль которых меньше .единицы (/Уэад7 1) сигнала рассогласования по температуре д Т - Т3ад.. использования на участках стабилизации скорости для сглаживания процесса стабилизации по скорости и температуре вместо нагревателя - холодового воздействия меньшей интенсивности, использования на участке стабилизации температуры импульсов минимальной длительности и использования для управления процессом только информации о знаке ошибки рассогласования 5, что, в свою очередь, позволило получить на участках переходного процесса апериодический характер процесса, величина перерегулирования которого по скорости не превышает 14% от заданного значения скорости, а на участке установившегоя движения отклонение текущей скорости Уот заданного значения Узад. не превышает 1%, на участках стабилизации температуры - стабильный характер установившегося движения с отклонением текущей температуры от заданной не более 5%, а также диапазон.
стабилизации скорости от ± 0,01 до ±100°/мин с указанной выше точностью, оптимальный коэффициент усиления и более простой характер нахождения оптимальных параметров настройки (коэффициента усиления) вследствие пропорционального соответствия длительности управляющих импульсов - заданной скорости замораживания и повысить сохранность биоматериалов при замораживании.
В данном устройстве достигается стабильность и качество переходных процессов за счет оптимального коэффициента
усиления тракта управления, обеспечивающего оптимальный характер процессов регулирования на участках стабилизации скорости и температуры. Заданная температура стабилизации +10°С.
Высокий уровень оптимизации процессов программного замораживания биоматериалов в широком диапазоне скоростей (±0,01...±100°/мин) на участках стабилизации скорости и температуры дает возможность использовать данное устройство для программного замораживания биоматериалов как в реальных условиях, так и в научно- исследовательских целях, и, что очень важно, повысить сохранность биоматериалов при замораживании.
Формула изобретения
Устройство для замораживания биоматериалов, содержащее камеру замораживания с датчиком температуры, подключенным к последовательно соединенным первому блоку сравнения, линейному задатчику температуры, задатчику
начальной температуры, а также дифференцирующий блок, вход которого соединен с датчиком температуры, а выход - с вторым блоком сравнения, генератор пилообразного напряжения, подключенный к последовательно соединенным первому компаратору, первому блоку совпадений, первому исполнительному механизму, подсоединенный к камере замораживания, второй компаратор, второй вход которого соединен с нулевой шиной, а выход подключен к второму входу первого блока совладений и к последовательно соединенным первому инвертору, второму блоку совпадений, первый вход которого соединен с выходом первого компаратора, второму исполнительному механизму, соединенному с камерой замораживания, блок формирования периода управления, второй вход которого соединен с вторым выходом генератора
пилообразного напряжения, а выход-с входами первого и второго блоков совпадений, задатчик скорости, выход которого соединен с вторым блоком сравнения, а также входами линейного задатчика температуры и блока формирования периода управления, отличающееся тем, что, с целью повышения сохранности биоматериалов при замораживании путем повышения точности регулирования процесса программного замораживания, оно снабжено блоком задания, блоком формирования длительности импульсов, вторым инвертором, третьим блоком совпадений, третьим и четвертым компараторами, при этом первый и второй входы блока задания подключены соответственно к выходам второго и первого блоков сравнения, третий вход соединен с выходом задатчика скорости, а выход подключен к первому входу второго
компаратора, вход блока формирования длительности импульсов подключен к выходу задатчика скорогти, а его первый и второй выходы подсоединены соответственно
к первым входам первого и третьего компараторов, второй вход третьего компаратора подключен к первому выходу генератора пилообразного напряжения, а его выход - к первому входу третьего блока сравнений,
второй вход которого подсоединен к выходу четвертого компаратора, третий вход - к выходу блока формирования периода управления, четвертый вход - к выходу первого инвертора, а выход третьего блока
сравнения подключен к первому входу первого исполнительного механизма, вход четвертого компаратора подсоединен к выходу задагчика скорости, а его выход через второй инвертор подключен также к четвертому входу второго блока совпадений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для замораживания биоматериалов | 1989 |
|
SU1714309A1 |
| Устройство для замораживания биоматериалов | 1990 |
|
SU1709158A1 |
| Устройство для замораживания биоматериалов | 1982 |
|
SU1044098A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Устройство для консервации биологических объектов | 1983 |
|
SU1178378A1 |
| Регулятор источника реактивной мощности | 1977 |
|
SU666608A1 |
| Устройство для программного замораживания биообъектов | 1987 |
|
SU1455184A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| Гистерезисный электропривод | 1984 |
|
SU1261078A1 |
Использование: в области криогенной техники, используемой для биологических и медицинских исследований. Сущность изобретения: в устройство для замораживания материалов дополнительно введены блок задания, блок формирования длительности импульсов, втооой инвертор, третий блок совпадения, третий и четвертый компараторы 4 ил.
Фиг
-ЧФЭ
FF
Ц -3 -2 -1 0 1 2 3 Ц 5 6 зЙ
t№3
Фиъ.2
Vyti
Nnep
ID
to t, t2
| Устройство для замораживания биоматериалов | 1990 |
|
SU1709158A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Устройство для замораживания биоматериалов | 1989 |
|
SU1714309A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
