Изобретение относится к виброметрии и может быть использовано для бесконтактного измерения радиоволновым методой параметров вибрации различных объектов при их испытаниях на вибропрочность и виброустойчивость.
Известно, что для измерения параметров вибрации скорость механических колебаний испытываемых объектов определяют бесконтактным радиоволновым способом на основе использования эффекта Доплера.
При использовании известного способа движущийся объект облучают зондирующим СВЧ-сигналом, измеряют частоту oirpa- женного сигнала и сравнивают ее изменения с частотой с частотой опорного сигнала. При совпадении вектора колебаний объекта с направлением излучения величину амплитудного значения скорости
вибрации определяют умножением допле- ровского смещения частоты на длину волны излучения. При фиксированной длине волны опорного СВЧ-сигнала точность измерений будет определяться величиной доплеровского смещения, т.е. скоростью объекта.
Наиболее близким по технической сущности к предлагаемому является СВЧ-спо- соб измерения скорости механических колебаний, который заключается в том, что движущийся объект облучают зондирующим СВЧ-сигналом и осуществляют прием амплитудно-модулированного сигнала, по которому судят о скорости. Скорость будет равна измеренному значению вибросмещения, умноженному на частоту возбуждения, равную измеренному значению частоты резонансных колебаний. На резонансных часх|
Оч
со
ю
тотах исследуемого объекта происходит резкое увеличение амплитуды вибросмещения, возрастает глубина модуляции, а следовательно, и амплитуда низкочастотной огибающей СВЧ-сигнала, которую выделя- ют посредством амплитудного детектирования. Для обеспечения заданной точности измерений исследуемый элемент объекта размещают в непосредственной близости от чувствительного элемента в максимуме градиента СВЧ-поля. На таких расстояниях возникает параметрическая связь между объектом и чувствительным элементом, в качестве которого используют объемный резонатор с встроенной штыревой антенной. Резонансные уровни вибросмещения вызывают возмущения напряженности СВЧ-поля и периодическую расстройку резонатора. uкоторая приводит к амплитудной модуляции СВЧ-мощности. После детектирования .по огибающей сигнала несущей частоты определяют величину вибросмещения на резонансных частотах объекта. Выполнив операцию дифференцирования, можно определить величину виброскорости. Прове- дение измерений в ближней зоне антенны сопровождается критичностью порога параметрической связи, а следовательно, и флкжтуациями уровня выходных сигналов вибросмещения и виброскорости. Возника- ет необходимость во введении различного характера развязок между прямым и отраженным сигналами, генератором и чувствительным элементом, а также подстройки чувствительности на максимальное значе- ние.
Известный способ за счет низкого уровня порога чувствительности на нерезонансных частотах и его флюктуации на резонансных частотах не позволяете доста- точно высокими значениями точностей измерять вибросмещение и определять косвенным методом виброскорость1.
Целью изобретения является повышение точности измерения скорости.
Поставленная цель достигается тем, что согласно способу, заключающемуся в том, что движущийся объект облучают зондирующим СВЧ-сигналом и осуществляют прием амплитудно-модулированного отраженного сигнала, по которому судят о скорости, зондирующий сигнал модулируют в режиме затягивания частоты, измеряют значения амплитуд динамического затягивания частоты и напряжений огибающих модулируемых сигналов при наличии и отсутствии затягивания и определяют амплитуду виброскорости по формуле
Aft)i(0)
wo
j/1+
Ui(OJ и Со)
где (0) - амплитудное значение динамического затягивани-я частоты;
Шо - частота сигнала излучения;
Ui(0) и U(0}- амплитудные значения огибающих напряжений модулируемых сигналов соответственно при наличии и отсутствии затягивания частоты;
с - скорость света.
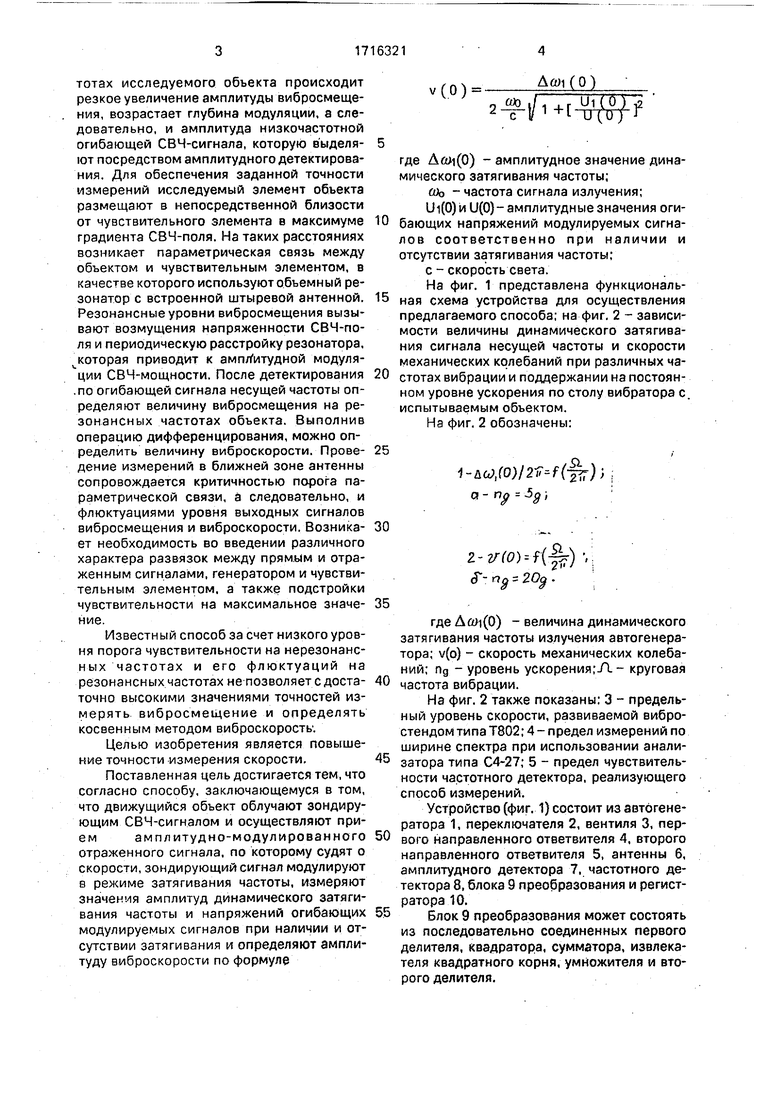
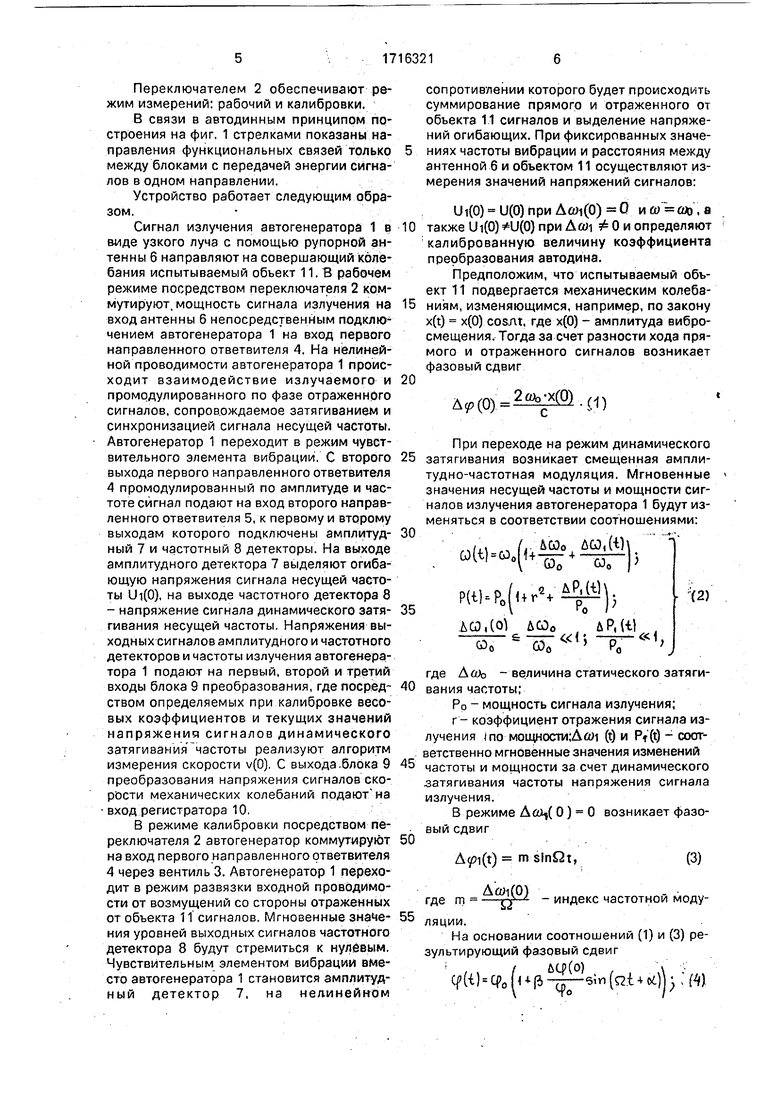
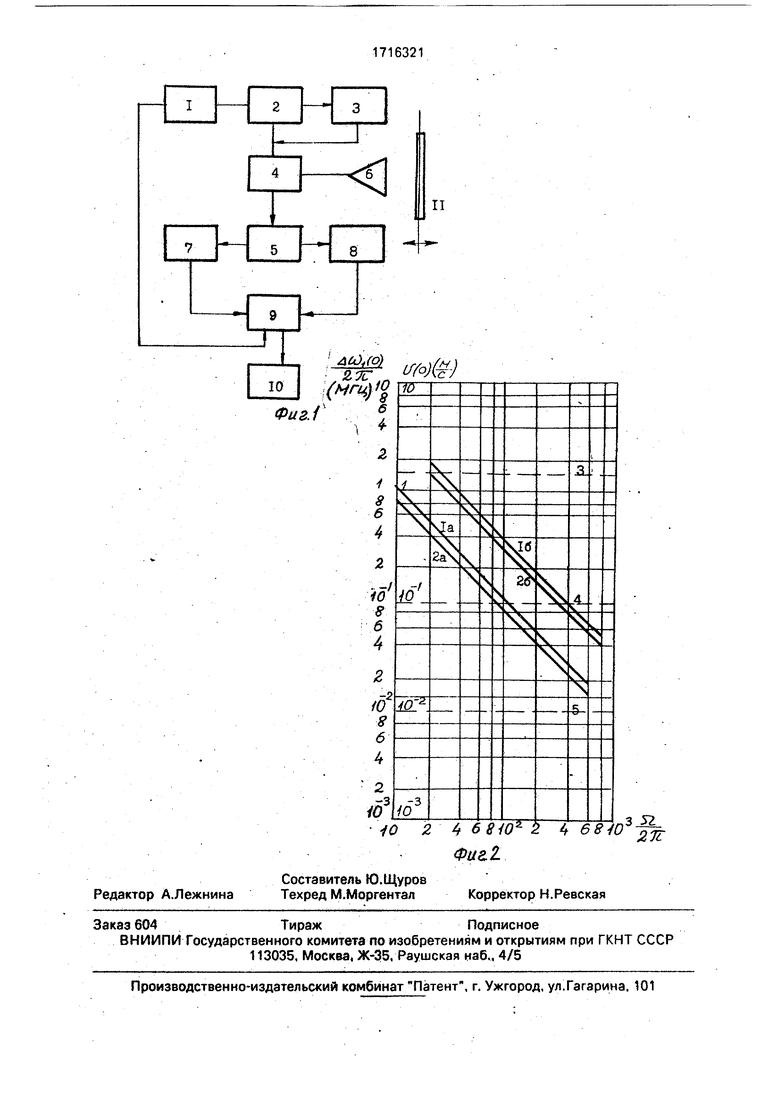
На фиг. 1 представлена функциональная схема устройства для осуществления предлагаемого способа; на фиг. 2 - зависимости величины динамического затягивания сигнала несущей частоты и скорости механических колебаний при различных частотах вибрации и поддержании на постоянном уровне ускорения по столу вибратора с. испытываемым объектом.
На фиг. 2 обозначены:
)/21Г(§Г);.:
9
а - п - 5д ;
Z-V(0)(), Г- пд 2О$ .
где (0) - величина динамического затягивания частоты излучения автогенератора; v(o) - скорость механических колебаний; ng - уровень ускорения;. круговая частота вибрации.
На фиг. 2 также показаны: 3 - предельный уровень скорости, развиваемой вибростендом типа Т802; 4 - предел измерений по ширине спектра при использовании анализатора типа С4-27; 5 - предел чувствительности частотного детектора, реализующего способ измерений.
Устройство (фиг. 1} состоит из автогенератора 1, переключателя 2, вентиля 3, первого направленного ответвителя 4, второго направленного ответвителя 5, антенны 6, амплитудного детектора 7, частотного детектора 8, блока 9 преобразования и регистратора 10.
Блок 9 преобразования может состоять из последовательно соединенных первого делителя, квадратора, сумматора, извлека- теля квадратного корня, умножителя и второго делителя.
Переключателем 2 обеспечивают режим измерений: рабочий и калибровки.
В связи в автодинным принципом построения на фиг, 1 стрелками показаны направления функциональных связей только между блоками с передачей энергии сигналов в одном направлении.
Устройство работает следующим образом.
Сигнал излучения автогенератора 1 в виде узкого луча с помощью рупорной антенны 6 направляют на совершающий колебания испытываемый объект 11. В рабочем режиме посредством переключателя 2 коммутируют, мощность сигнала излучения на вход антенны 6 непосредственным подключением автогенератора 1 на вход первого направленного ответвителя 4. На нелинейной проводимости автогенератора 1 происходит взаимодействие излучаемого и промодулированного по фазе отраженного сигналов, сопров.ождаемое затягиванием и синхронизацией сигнала несущей частоты. Автогенератор 1 переходит в режим чувствительного элемента вибрации. С второго выхода первого направленного ответвителя 4 промодулированный по амплитуде и частоте сигнал подают на вход второго направленного ответвителя 5, к первому и второму выходам которого подключены амплитудный 7 и частотный 8 детекторы. На выходе амплитудного детектора 7 выделяют огибающую напряжения сигнала несущей частоты Ui(0), на выходе частотного детектора 8 - напряжение сигнала динамического затягивания несущей частоты. Напряжения выходных сигналов амплитудного и частотного детекторов и частоты излучения автогенератора 1 подают на первый, второй и третий входы блока 9 преобразования, где посредством определяемых при калибровке весовых коэффициентов и текущих значений напряжения сигналов динамического затягивания частоты реализуют алгоритм измерения скорости v(0). С выхода.блока 9 преобразования напряжения сигналов скорости механических колебаний подают на вход регистратора 10.
В режиме калибровки посредством переключателя 2 автогенератор коммутируют на вход первого направленного ответвителя 4 через вентиль 3. Автогенератор 1 переходит в режим развязки входной проводимости от возмущений со стороны отраженных от объекта 11 сигналов. Мгновенные значения уровней выходных сигналов частотного детектора 8 будут стремиться к нулевым. Чувствительным элементом вибрации вместо автогенератора 1 становится амплитуд- ный детектор 7, на нелинейном
сопротивлении которого будет происходить суммирование прямого и отраженного от объекта 1.1 сигналов и выделение напряжений огибающих. При фиксированных значе- ниях частоты вибрации и расстояния между антенной б и объектом 11 осуществляют измерения значений напряжений сигналов:
U i(0) U(0) при Д (0) 0 и оГ two, а также Ui(0) U(0) при Дол Ф 0 и определяют калиброванную величину коэффициента преобразования автодина.
Предположим, что испытываемый объект 11 подвергается механическим колеба- ниям, изменяющимся, например, по закону x(t) х(0) cosnt, где х(0) - амплитуда вибросмещения. Тогда за счет разности хода прямого и отраженного сигналов возникает фазовый сдвиг
дт (0}.ш
При переходе на режим динамического затягивания возникает смещенная амплитудно-частотная модуляция. Мгновенные значения несущей частоты и мощности сигналов излучения автогенератора 1 будут изменяться в соответствии соотношениями:
co(t)w0ta
.. &СОо UCO,(t)
+
(Ос
W«
35
P(i)
(2)
АО), (01 ДСОойР,Н) .
s -rnr-«t} -о-«1
СО
где -величина статического затягивания частоты;
Ро - мощность сигнала излучения;
г - коэффициент отражения сигнала излучения Jno мощнос™;ДйЛ (t) и Pf(t) - соответственно мгновенные значения изменений частоты и мощности за счет динамического .затягивания частоты напряжения сигнала излучения.
В режиме Д«(0) 0 возникает фазовый сдвиг
A95i(t) m sinQt,
(3)
5
где m
A ffli(0)
Т2
индекс частотной модуляции.
На основании соотношений (1) и (3) результирующий фазовый сдвиг
qKt)cp0(( ( i°/
р-тИШ1.
I Alf(O)/
где р0 и а - значения фазовых набегов сигнала соответственно при
(0) 0 и Дйл(0) 0 и при Дал(0)0.
Из соотношений (1)-(4) видно, что при наличии механических колебаний объекта 11 амплитудные значения напряжений выходных сигналов детекторов изменяются с частотой вибрации и равны:15
для амплитудного детектора 7 соответственно при наличии и отсутствии затягивания частоты
U,(o)-A&cpt(o) при йСР,(оИО-,1 | U (o) ) при йсо,(о) о, ) (5)j
для частотного детектора 8
UgCohBbCOaohB-gQ- P
U(o) f 0 при дсо,(о) о}
Щ
-- 35
где А и В - коэффициенты преобразований сигналов соответственно амплитудным и частотным детекторами;
Q - добротность резонатора;
К - крутизна характеристики;40
f|- коэффициент, зависящий от чувствительности детектора.
Из соотношений (1), (3)-(5) для1 амплитудного значения величины скорости вибрации имеем45
Доя(О)
с
ft |Г uicojf
if1 +L U(U) -Г
(7)
Из соотношения (7) следует, что предлагаемый способ позволяет определять скорость механических колебаний методом прямых измерений амплитуды динамиче-
ского затягивания частоты напряжения сиг нала излучения автогенератора. За счет использования механизма динамического
-
10
15
20
25
30
35
40
затягивания частоты суммарная относительная погрешность измерений будет определяться значительно более высоким уровнем чувствительности и измеряемым с высокой точностью параметром Дсгл(О) , на который переносится информация о виброскорости исследуемого объекта.
Предлагаемый способ измерений по сравнению с известным позволяет проводить измерения скорости механических колебаний методом прямых измерений и обеспечивает более высокую чувствительность преобразования скорости вибрации в величину динамического затягивания частоты сигнала излучения и более высокую точность измерений скорости механических колебаний микроминиатюрных элементов на резонансных и нерезонансных частотах возбуждения. Кроме того, он позволяет проводить измерения в ближайшей и дальней зонах излучения и обеспечивает сочетание простоты конструктивного исполнения устройства прямого измерения скорости с воз- можностью широкого использования серийно выпускаемых генераторов и элементов СВЧ-трактов.
Форму л а изобретен и я Способ измерения скорости механических колебаний объекта, заключающийся в том, что движущийся объект облучают зондирующим СВЧ-сигналом и осуществляют прием амплитудно-модулированного отраженного сигнала, по которому судят о скорости, отличающийся тем, что, с целью повышения точности измерения скорости, зондирующий сигнал модулируют в режиме затягивания частоты, измеряют значения амплитуд динамического затягивания частоты и напряжений огибающих модулируемых сигналов при наличии и отсутствии затягивания и определяют амплитуду v(0) виброскорости по формуле
Дон (0)
ufe
if
1+1
U1(0.) i2
тптгг
Г
50
55
где Дйл(0) - амплитудное значение динамического затягивания частоты;
(Оо - частота сигнала излучения;
U 1(0}и U(0)- амплитудные значения огибающих напряжений модулируемых сигналов соответственно при наличии и отсутствии затягивания частоты;
с - скорость света.
II
W@J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вибрационных характеристик | 1988 |
|
SU1642260A1 |
| Устройство для бесконтактного измерения параметров вибрации | 1990 |
|
SU1740995A1 |
| Устройство для измерения параметров вибрации | 1985 |
|
SU1370592A1 |
| Способ измерения статодинамических параметров изделий при воздействии вибрации и температуры | 1988 |
|
SU1677533A1 |
| Устройство для бесконтактного измерения механических резонансных частот | 1985 |
|
SU1346985A1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 1997 |
|
RU2120647C1 |
| СИСТЕМА ИЗМЕРЕНИЙ ЦЕНТРА ОЖИДАЕМОГО СЕЙСМИЧЕСКОГО УДАРА | 2010 |
|
RU2426155C1 |
| СПОСОБ КРАТКОСРОЧНОГО ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2010 |
|
RU2438147C1 |
| ФОРМИРОВАТЕЛЬ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2004 |
|
RU2282302C1 |
| ПОЛЯРИЗАЦИОННЫЙ ИЗМЕРИТЕЛЬ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2008 |
|
RU2439624C2 |
Изобретение относится к виброметрии, преимущественно к бесконтактным радиоволновым методам измерения параметров вибрации при испытаниях различных обьектов на вибропрочность и виброустойчивость, Цель изобретения - повышение точности за счет увеличения чувствительности к виброскорости. Измерения осуществляют, в режиме затягивания частоты, измеряют мгновенные значения напряжения сигналов динамического затягивания, а также огибающих модулируемых сигналов при наличии и отсутствии затягивания и определяют амплитуду виброскорости по формуле v{G -Дал (0) /2 Oh /с |(1+(U1 (0) /U (0)f , гдеАол (0) - амплитудное значение динамического затягивания частоты; ah - частота сигнала излучения; Ui(Q) и U(0) - амплитудные значения огибающих напряжения модулируемых сигналов соответственно при наличии и отсутствии затягивания частоты; с - скорость света. 2 ил. (Л С
10 8
6
4
Ю 8
6 4
| Приборы и системы для измерения вибраций, шума и удара/Справочник под ред | |||
| Клюева В.В | |||
| М.: Машиностроение, т.2, с.26- 27,47-49 | |||
| Журнал Электронная техника, сер, 8, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
