Изобретение относится к методам измерений при испытаниях различных изделий на одновременное воздействие вибрации и других эксплуатационных факторов и может быть использовано для бесконтактного радиочастотного исследования статодинамических параметров конструктивных элементов изделий, находящихся в условиях воздействия вибрации и температуры.
Цель изобретения - увеличение точности измерений.
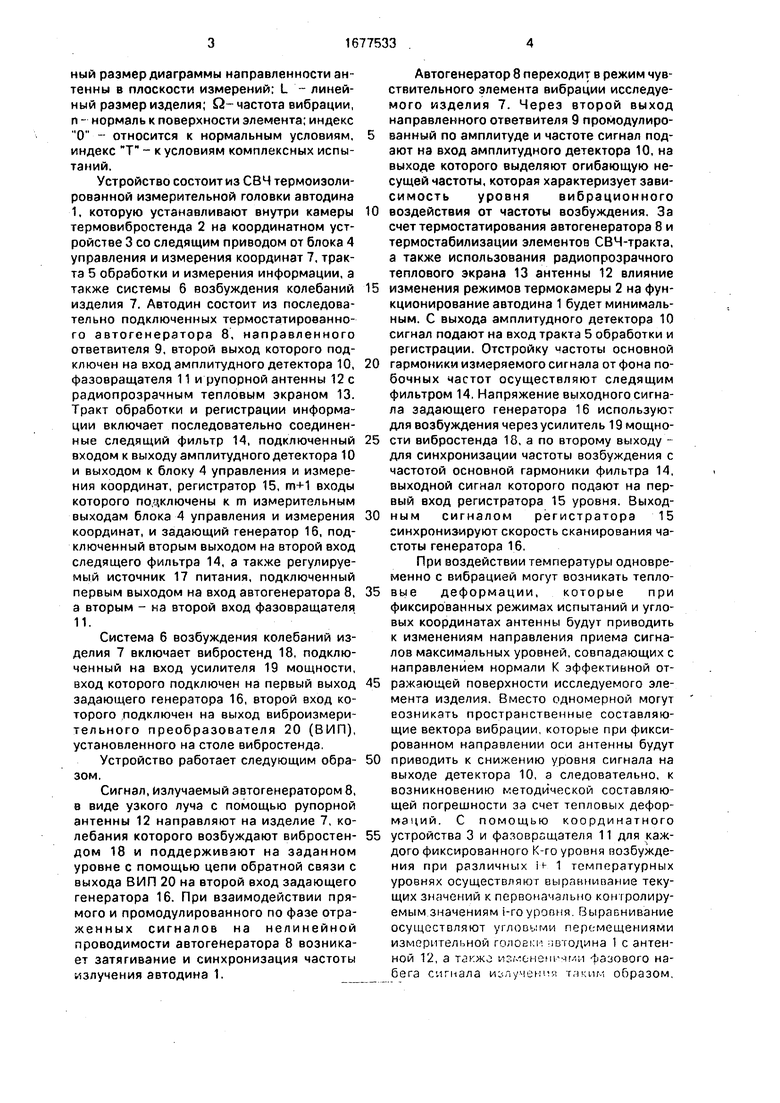
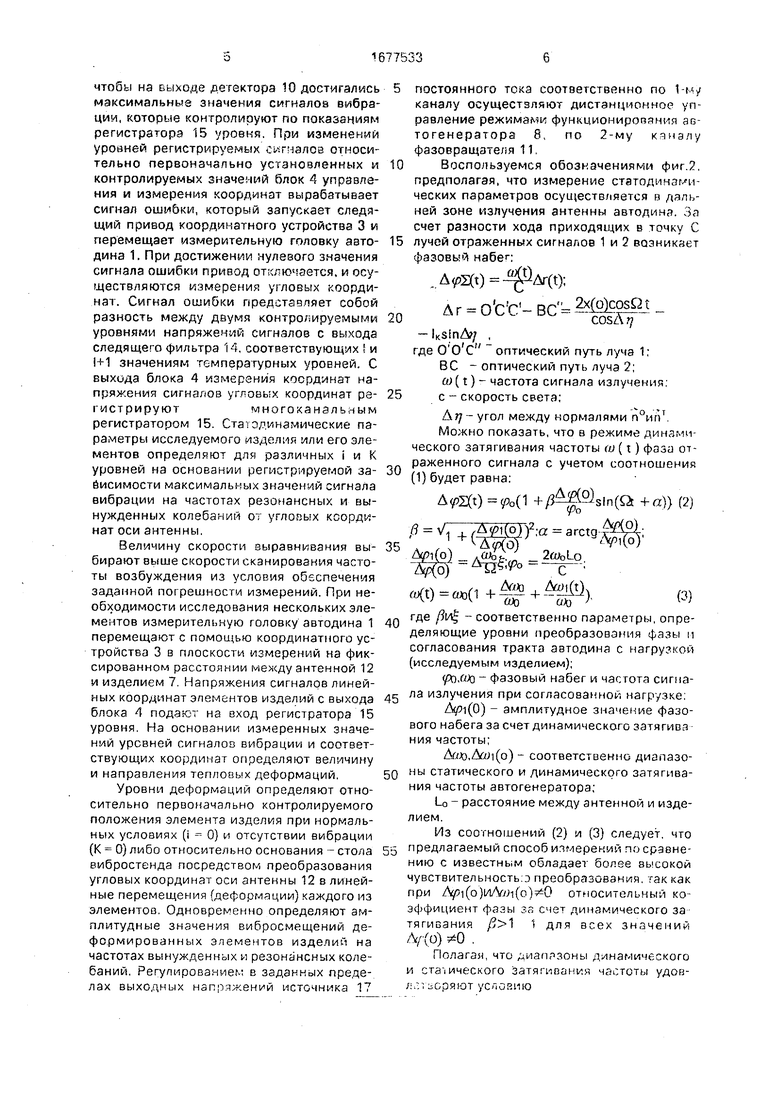
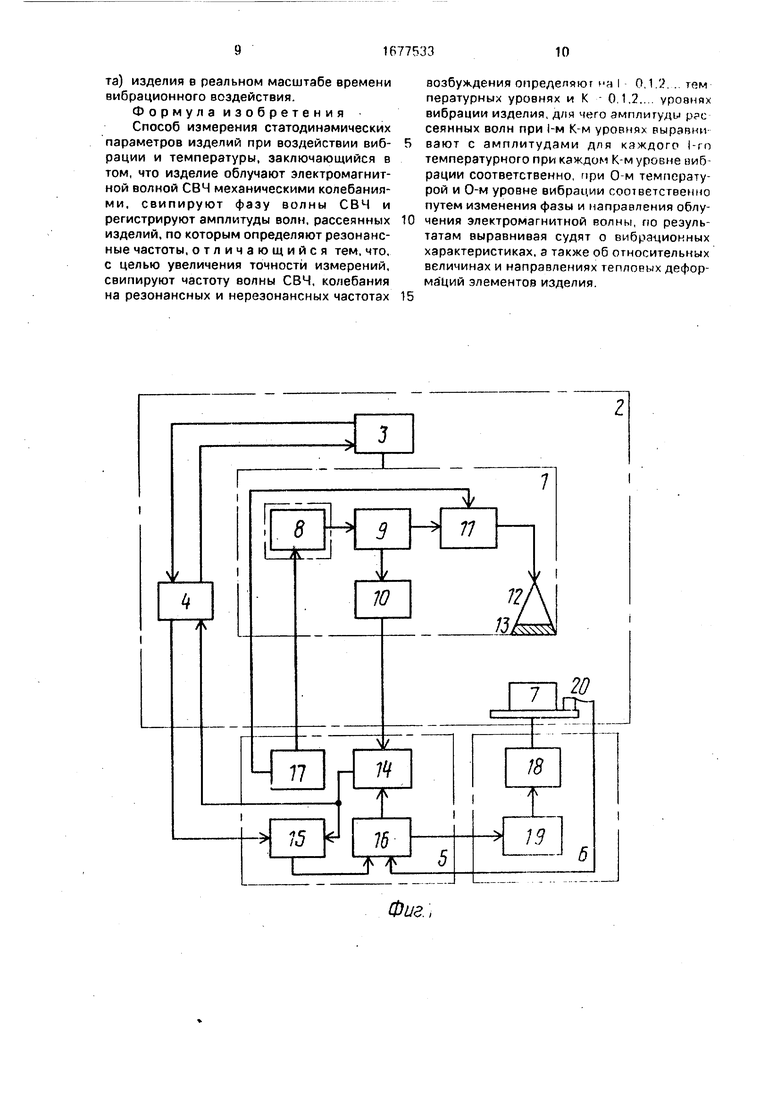
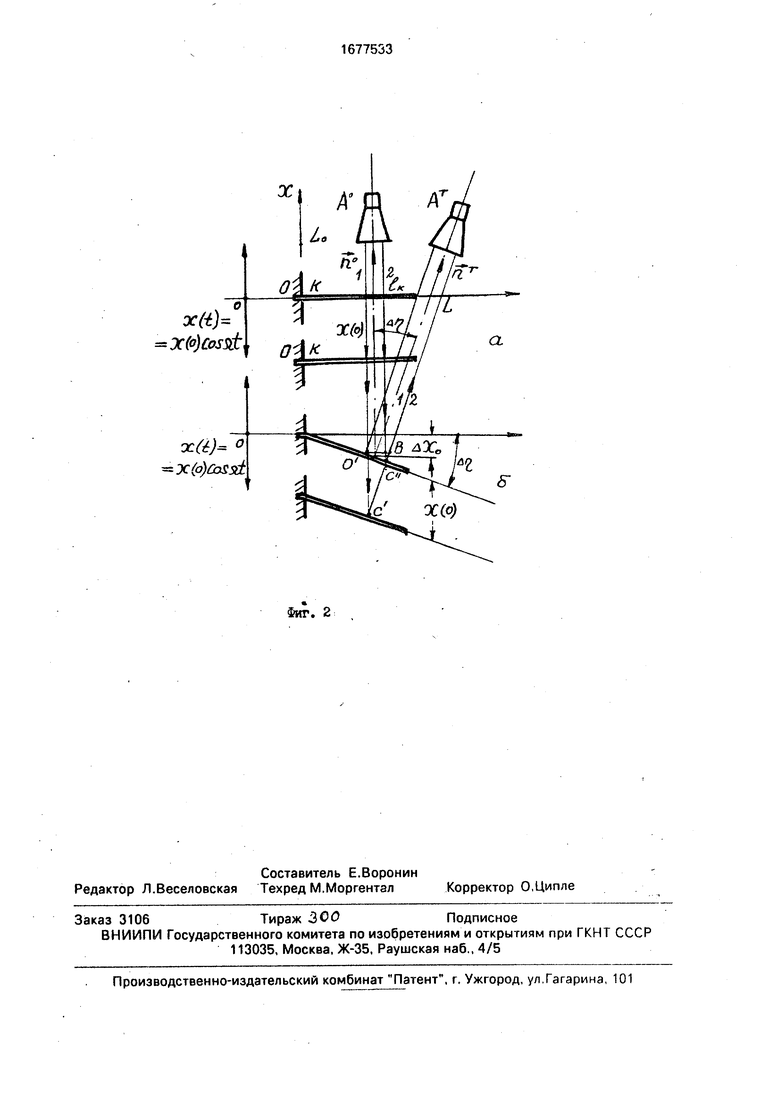
На фиг.1 представлена функциональная схема устройства для осуществления предлагаемого способа измерений; на фиг.2 - схема осуществления способа измерения
статодинамических параметров конструктивного элемента изделия консольного типа при комплексном воздействии вибрации и температуры.
На фиг.2 приняты следующие обозначения: а - нормальные условия + вибрация; б - комплексное воздействие вибрации и температуры; А - антенна; К - исследуемый элемент; О - основание - вибростол;Лу о) - амплитудное зна .ение изменения фазы отраженного сигнала за счет вибрации; Х(о) - амплитудное значение вибросмещения; Дуй- составляющая фазового набега при изменении расстояния за счет тепловой деформации, АХо линейная деформация (прогиб) поверхности изделия; I - линейо VI VJ ел со
Ј
ный размер диаграммы направленности антенны в плоскости измерений: L - линейный размер изделия; Q- частота вибрации, п - нормаль к поверхности элемента; индекс О - относится к нормальным условиям, индекс Т - к условиям комплексных испытаний.
Устройство состоит из С8Ч термоизоли- ровэнной измерительной головки автодина 1, которую устанавливают внутри камеры термовибростенда 2 на координатном устройстве 3 со следящим приводом от блока 4 управления и измерения координат 7, тракта 5 обработки и измерения информации, а также системы 6 возбуждения колебаний изделия 7. Автодин состоит из последовательно подключенных термостатированного автогенератора 8, направленного ответвителя 9, второй выход которого подключен на вход амплитудного детектора 10, фазовращателя 11 и рупорной антенны 12 с радиопрозрачным тепловым экраном 13. Тракт обработки и регистрации информации включает последовательно соединенные следящий фильтр 14, подключенный входом к выходу амплитудного детектора 10 и выходом к блоку А управления и измерения координат, регистратор 15, т+1 входы которого подключены к m измерительным выходам блока 4 управления и измерения координат, и задающий генератор 16, подключенный вторым выходом на второй вход следящего фильтра 14, а также регулируемый источник 17 питания, подключенный первым выходом на вход автогенератора 8, а вторым - на второй вход фазовращателя 11.
Система 6 возбуждения колебаний изделия 7 включает вибростенд 18, подключенный на вход усилителя 19 мощности, вход которого подключен на первый выход задающего генератора 16, второй вход которого подключен на выход виброизмерительного преобразователя 20 (ВИП), установленного на столе вибростенда.
Устройство работает следующим образом,
Сигнал, излучаемый автогенератором 8, в виде узкого луча с помощью рупорной антенны 12 направляют на изделие 7, колебания которого возбуждают вибростендом 18 и поддерживают на заданном уровне с помощью цепи обратной связи с выхода ВИП 20 на второй вход задающего генератора 16. При взаимодействии прямого и промодулированного по фазе отра- женных сигналов на нелинейной проводимости автогенератора 8 возникает затягивание и синхронизация частоты излучения автодина 1.
Автогенератор 8 переходит в режим чувствительного элемента вибрации исследуемого изделия 7. Через второй выход направленного ответвителя 9 промодулированный по амплитуде и частоте сигнал подают на вход амплитудного детектора 10, на выходе которого выделяют огибающую несущей частоты, которая характеризует зависимость уровня вибрационного
0 воздействия от частоты возбуждения. За счет термостатирования автогенератора 8 и термостабилизации элементов СВЧ-тракта, а также использования радиопрозрачного теплового экрана 13 антенны 12 влияние
5 изменения режимов термокамеры 2 на функционирование автодина 1 будет минимальным. С выхода амплитудного детектора 10 сигнал подают на вход тракта 5 обработки и регистрации. Отстройку частоты основной
0 гармоники измеряемого сигнала от фона побочных частот осуществляют следящим фильтром 14. Напряжение выходного сигнала задающего генератора 16 используют для возбуждения через усилитель 19 мощно5 сти вибростенда 18, а по второму выходу - для синхронизации частоты возбуждения с частотой основной гармоники фильтра 14, выходной сигнал которого подают на первый вход регистратора 15 уровня. Выход0 ным сигналом регистратора 15 синхронизируют скорость сканирования частоты генератора 16.
При воздействии температуры одновременно с вибрацией могут возникать тепло5 вые деформации, которые при фиксированных режимах испытаний и угловых координатах антенны будут приводить к изменениям направления приема сигналов максимальных уровней, совпадающих с направлением нормали К эффективной от5 ражающей поверхности исследуемого элемента изделия. Вместо одномерной могут возникать пространственные составляющие вектора вибрации, которые при фиксированном направлении оси антенны будут
0 приводить к снижению уровня сигнала на выходе детектора 10, а следовательно, к возникновению методической составляющей погрешности за счет тепловых деформаций. С помощью координатного
5 устройства 3 и фазовращателя 11 для каждого фиксированного К-го уровня возбуждения при различных it- 1 температурных уровнях осуществляют выравнивание текущих значений к первоначально контролируемым значениям i-ro уровня. Выравнивание осуществляют угловыми перемещениями измерительной голоаки. -штодина 1 с антенной 12, а Тсткжо изменсмияг/.и фазового набега сигнала излучения т,ччим образом.
чтобы на выходе детектора 10 достигались максимальные значения сигналов вмбра- ции, которые контролируют по показаниям регистратора 15 уровня. При изменений уровней регистрируемых сигналов относительно первоначально установленных и контролируемых значений блок 4 управления и измерения координат вырабатывает сигнал ошибки, который запускает следящий привод координатного устройства 3 и перемещает измерительную головку автодина 1. При достижении нулевого значения сигнала ошибки привод отключается, и осуществляются измерения угловых координат. Сигнал ошибки представляет собой разность между двумя контролируемыми уровнями напряжений сигналов с выхода следящего фильтра 14, соответствующих I и 1+1 значениям температурных уровней. С выхода блока 4 измерения координат напряжения сигналов угловых координат регистрируютмногоканальнымрегистратором 15. Стаюдинамические параметры исследуемого изделия или его элементов определяют для различных i и К уровней на основании регистрируемой зависимости максимальных значений сигнала вибрации на частотах резонансных и вынужденных колебаний от угловых координат оси антенны.
Величину скорости выравнивания выбирают выше скорости сканирования частоты возбуждения из условия обеспечения заданной погрешности измерений. При необходимости исследования нескольких элементов измерительную головку автодина 1 перемещают с помощью координатного устройства 3 в плоскости измерений на фиксированном расстоянии антенной 12 и изделием 7. Напряжения сигналов линейных координат элементов изделий с выхода блока 4 подают на вход регистратора 15 уровня. На основании измеренных значений уровней сигналов вибрации и соответствующих координат определяют величину и направления тепловых деформаций.
Уровни деформаций определяют относительно первоначально контролируемого положения элемента изделия при нормальных условиях (i 0) и отсутствии вибрации (К 0) либо относительно основания - стола вибростенда посредством преобразования угловых координат оси антенны 12 в линейные перемещения (деформации) каждого из элементов. Одновременно определяют амплитудные значения вибросмещений деформированных элементов изделий на частотах вынужденных и резонансных колебаний. Регулированием в заданных пределах выходных напряжений источника 17
0
5
постоянного тска соответственно по 1-к/ каналу осуществляют дистанционное управление режимами функционирования автогенератора 8, по 2-му кянэлу фазовращателя 11,
Воспользуемся обозначениями фиг.2. предполагая, что измерение статодинзг/и- ческих параметров осуществляется в дальней зоне излучения антенны автодина. За счет разности хода приходящих в точку С лучей отраженных сигналов 1 и 2 возникает фазовый набег;
..(Т);
Л г - О с г - SteosQt - ДГ-UUU bU- Ш5д -1кз пД 7 L
где О О С оптический путь луча 1; ВС - оптический путь луча 2; ш (t) - частота сигнала излучения: с - скорость света;
угол между нормалями п°ипт.
Можно показать, что в режиме динамического затягивания частоты (t)(i) фаза отраженного сигнала с учетом соотношений (1) будет равна;
рьО + /3 ||®sln(Qt + a)) (2)
0
5
0
ft J $jjP a a -$$
71 (о) xOW. „ 2(JDoLo
Ж-Д-п -Г ;
35
,ы(1)(3)
0)Q U)Q
« где flv - соответственно параметры, определяющие уровни преобразования фазы п согласования тракта автодина с нагрузкой (исследуемым изделием);
po,(i)Q - фазовый набег и частота сигнае ла излучения при согласованной нагрузке;
(0) - амплитудное значение фазового набега за счет динамического затягивз ния частоты;
Дшо,(о) - соответственно диапазо- 0 ны статического и динамического затягивания частоты автогенератора;
LO - расстояние между антенной и изделием.
Из соотношений (2) и (3) следует, что 5 предлагаемый способ измерений по сравнению с известным обладает более высокой чувствительность:;) преобразования, так как при (o)(o)0 относительный коэффициент фазы за счет динамического затягивания 1 для всех значений /У(о) 0 .
Полагая, что диапазоны динамического и статического затягивания частоты удов- л.:1 асряют условию
AWi(0)AW0 . m V t4) а также ограничиваясь первой гармоникой частоты огибающей тока амплитудного детектора i(t), для коэффициента преобразова- ния статодинамических параметров способа измерений имеем:
A M BoWoP;(5)
Л / Р Poexp(-2ooLo)
2в
Ое
()) 4 -М+тгегСдУ
/Аь
Јо
W
(6)
где РоЯ -гдт- т- соответственно мощ- TO
ность и длина волны излучения; Оо коэффициент затухания;
БО 1-у«а /«о 4тгЮсоответственно диэлектрическая и магнитная проницаемости воздуха и материала стенок ВОЛНОБОДНОГО тракта с поперечным сечением а х Ь;
РО удельное сопротивление материала стенок при Т 20°С,
«тс - температурный коэффициент сопротивления материала стенок;
Т° - температура окружающей среды, °С;
Ь0 - аппаратный параметр, не зависящий от W0 и Р.
В соответствии с соотношениями (5) и (6) величина погрешности измерений параметров вибрации при комплексных испытаниях может быть представлена как
О+ф2 Р
За счет использования термостабилизации автогенератора и термоизоляции измерительной головки автодина величину
ООДо
составляющей погрешности можно
U/Q
сделать не хуже . С учетом данных из соотношения (7) для волны излученияА 5А
8 мм имеем
В соответствии с обозначениями фиг.2 и соотношением (1) уровни и направления относительных тепловых деформаций поверхности конструктивного элемента могут быть определены как ДХ 1
А
Ёа
где а- напряжения тепловых деформаций,
Е - модуль упругости.
Полагая, что при воздействии температуры возникающие на единице поверхности материала элемента изделия напряжения
а в первом приближении пропррциональны изменению температуры Л Т , имеем
А аткАТ,
где а™ - коэффициент пропорциональности.
При Д 1 и фиксированном направлении от измерительной системы эвтодина суммарный фазовый набег отраженного 0 сигнала в С за счет вибрации и температуры будет равен;
A(t) Ap(o)cosfit - Арь ;
Arto)Px(o), 5д | М1|каткд-п (9)
Из соотношений (8) и (9) видно, что при фиксированных координатах оси антенны с изменением температуры уровень сигнала, 0 характеризующего взаимодействие между полем излучения и изделием, может уменьшаться.
При А у е (t) независимо от того, что
.)), амплитудное значе- 5 ние тока детектора 1(0) , Достижение первоначально установленного максимального уровня (0) обеспечивают компенсацией фазовращателем 10 фазового набега Аузы о и изменением направления оси антенны на
угол ) , так чтобы направление нормали к поверхности исследуемого элемента при изменении температуры в пределах
AT ТР+ 1 - Тр совпадало с направлени5 ем оси измерений, т.е. соответствовало максимуму направления излучения - приема диаграммы направленности антенны,
Осуществив выравнивание 1(0) к первоначальному значению, в соответствии с со0 отношением (8) и (9) определяют величину и направление А /изменениемА о() и угла поворота оси антенны при Т° Т°щ относительно значений при Т° T°i.
Так как определение осуществляют
5 измерениями 1(0), точность измерений величины и направления тепловых деформаций будет определяться величиной методической погрешности соотношения (7), а также инструментальной погрешностью блока 4
0 измерения координат.
Таким образом, по сравнению с известным предлагаемый способ измерений обеспечивает повышение точности измерений статодинамических параметров элементов
5 изделий при комплексных испытаниях; более высокую чувствительность измерений вибрационных характеристик на частотах резонансных и вынужденных колебаний; измерение тепловых деформаций для одной и той же точки (микроминиатюрного элемента) изделия в реальном масштабе времени вибрационного воздействия.
Формула изобретения Способ измерения статодинамических параметров изделий при воздействии вибрации и температуры, заключающийся в том, что изделие облучают электромагнитной волной СВЧ механическими колебаниями, свипируют фазу волны СВЧ и регистрируют амплитуды волн, рассеянных изделий, по которым определяют резонансные частоты, отличающийся тем, что, с целью увеличения точности измерений, свипируют частоту волны СВЧ, колебания на резонансных и нереэонансных частотах
0
возбуждения определяют на | 01 2 тем пературных уровнях и К 0 1,2. уровнях вибрации изделия, для чего амплитуды сеянных волн при 1-м К-м уровнях выравни вают с амплитудами для каждого 1-го температурного при каждом К-м уровне аиб рации соответственно, при 0-м температурой и 0-м уровне вибрации соответственно путем изменения фазы и направления облучения электромагнитной волны, по результатам выравнивая судят о вибрационных характеристиках, а также об относительных величинах и направлениях тепловых дефор- ма Ций элементов изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактного измерения параметров вибрации | 1990 |
|
SU1740995A1 |
| Устройство для измерения вибрационных характеристик | 1988 |
|
SU1642260A1 |
| Способ Щурова измерения скорости механических колебаний объекта | 1989 |
|
SU1716321A1 |
| Устройство для бесконтактного измерения механических резонансных частот | 1985 |
|
SU1346985A1 |
| Устройство для измерения параметров вибрации | 1985 |
|
SU1370592A1 |
| СИСТЕМА ИЗМЕРЕНИЙ ЦЕНТРА ОЖИДАЕМОГО СЕЙСМИЧЕСКОГО УДАРА | 2010 |
|
RU2426155C1 |
| ИЗМЕРИТЕЛЬ ЭТАЛОННЫХ СПЕКТРОВ ВОЛНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2644628C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 1997 |
|
RU2120647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2596628C1 |
| СПОСОБ КРАТКОСРОЧНОГО ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2010 |
|
RU2438147C1 |
Изобретение относится к измерительной технике, преимущественно к радиоволновым методам измерений статодинамических параметров различных изделий при их испытаниях на одновременное воздействие вибрации и температуры. Целью изобретения является увеличение точности. Измерения осуществляют в режиме динамического затягивания частоты, одновременно с определением резонансных /Р/ частот для каждого К-го фиксированного уровня /У/ возбуждения регистрируют при различных /1+1/ температурных У, где I 0.1,2,3 .., К 0,1,2,3... номера У, амплитудные значения Р и вынужденных колебаний, а затем осуществляют их выравнивание к первоначально контролируемым значениям i-ro У посредством изменений фазы СВЧ-сигнала и пространственной ориентации оси антенны, устанавливаемой на фиксированном расстоянии от изделия, по результатам выравнивания судят о вибрационных характеристиках, а также относительных величинах и направлениях тепловых деформаций элементов изделий. 2 ил. СО С
Фиг,
X
xfa
X(o)CoS$t
x&) ° X(o)tassd
Фиг. 2
| Майоров А | |||
| В., Потюков Н.П | |||
| Планирование и проведение ускоренных испытаний на надежность устройств электронной автоматики | |||
| М.: Радио и связь, 1982 | |||
| Электронная техника, сер | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
