Изобретение относится к медицине, в частности к протезированию и протезостроению, и может быть использовано для оценки вакуумного крепления протеза бедраГ(
Целью изобретения является повышение точности и расширение области измере- ния в динамике пррцесса ходьбы в соответствии с фазами шага.
На фиг.1 приведен преобразователь- элемент, общий вид; на фиг.2 - схема выполнения упругого элемента в составе с трансформатором давления; на фиг.З - схема преобразовательного элемента с транс- Форматором силы; на фиг.4 - электрическая схема преобразовательного элемента; на фиг.5 - схема нагружения на изгмб предлагаемого упругого элемента; на фиг.6-схема нагружения упругого элемента силой F.
Устройство содержит заглушку, которая с помощью резьбового соединения и уплот- нительной шайбы установлена в гнезде под
клапан вакуумного крепления в гильзе бедра. Преобразовательный элемент 1 содержит консольно закрепленный в держателе 2 упругий элемент 3, выполненный из двух пластин 4 и 5. На верхней поверхности пластины 4 расположены тензодатчики 6, а на нижней поверхности пластины 5-тензодатчики 7. Упругий элемент 3 выполнен из неэлектропроводного материала, например из стекла или ситала и т.д., причем тензодатчи- i ки 6 и 7, пластины 4 и 5 имеют одинаковый коэффициент линейного расширения.
Перед сборкой упругого элементе Зчв неразъемную конструкцию каждая гластй- на 4 (5) с предварительно закрепленными (нанесенными) тензорезистивными слоями тензодатчиков 6 и 7 и элементами 8-10 жесткости селективно подбирается в пары по номинальному сопротивлению и коэффициенту тензочувствительности.
Х|
00 Ч) О О
Каждая пластина 4 (5) в отдельности является активным плечом мостовой электрической схемы RI или Ra преобразовательного элемента. При объединении двух пластин 4 и $ в упругий эле-; мент 3 подобраныне ранее параметры (номинальное сопротивление тензодатчиков б и 7, коэффициент тензочувствительно- сти) плеч мостовой схемы практически не меняются.
Каждая из пластин 4 и 5 упругого элемента 3 снабжена элементами 8-10 жесткости в виде неразъемно соединенных прямоугольных накладок, закрепленных со стороны тензодатчиков 6 и 7. Для обеспечения крепления упругого элемента 3 в держа- те.ле 2 используются промежуточные прокладки 11, расположенные под элементами 8-10. Толщина прокладок 11 выбирается равной толщине тензодатчиков.
Прямоугольные элементы 10 жесткости предназначены для дополнительного крепления концов тензодатчиков 6 и 7 к поверхности пластин 4 и 5 упругого элемента 3, а также служат для обеспечения вывода из зоны деформации электрических выводов 12 тензодатчков 6 и 7. Элементы 8-10 выполнены из электроизоляционного материала, например стекла, обладающего высокими электроизоляционными свойствами, т.е. вы полн я ют также роль изоляторов в месте заделки упругого элемента в держатель. Это обеспечивает высокую электробезопасность конструкции. Элементы 8-10, а также прокладки 11 имеют такой же коэффициент линейного расширения, как держатель 2, упругий элемент 3, тензодатчики 6 и 7.
При прямом изгибе упругого элемента 3 во внешних волокнах возникают наибольшие продольные деформации. В предлагаемой конструкции внешними волокнами являются закрепленные тензодатчики, которые претерпевают наибольшую продоль ную деформацию сжатия или растяжения. Для увеличения надежности крепления тен- зодатчиков в конструкцию введены элементы 8-10, которые дополнительно закрепляют концы тензодатчиков. Это конструктивное решение увеличивает общую площадь крепления тензодатчиков в местах наибольшей деформации сжатия или растяжения, чем снижается остаточная деформация (гистерезис), увеличивается надежность работы упругого элемента в знакопеременных нагрузках.
. Преобразовательный элемент датчиков содержит также промежуточный передатчик 13 силы перемещения, выполненный в виде стержня с шарниром с внутренним
трением, жестко соединенного соответственно с подвижным концом упругого элемента 3 и трансформатором 24 силы, корпус 14 преобразовательного элемента, плату 15
крепления гермовыводов. Гермовывод 16 (показан только один из трех гермовыводов) служит для подсоединения электрических выводов 12 упругого элемента 3 с элементами настройки мостовой схемы.
0 Верхний ограничительный упор 17 ограничивает ход упругого элемента при перегрузках положительного давления перемещения, нижний ограничительный упор 18ограничиваетходупругогоэлемента
5 при перегрузках отрицательного давления перемещения, элемент настройки мостовой схемы 19, содержащий сопротивления R/J.RS.RP.RH.RZ. Кронштейн 20 крепления соединяет все детали преобразователя, За0 щитный колпачок 21 предохраняет преобразователь от механических воздействий и служит экраном электрической схемы. Планка 22 крепления кабеля, выходной кабель 23 служат для питания электриче5 ской схемы преобразователя и съема выходного сигнала. Упругая мембрана 24 рассматривается как пример возможного применения преобразовательного элемента. Меняя эффективную площадь мембраны,
0 ее толщину, модуль упругости и т.д., возможно построение на основе предлагаемого преобразовательного элемента ряда датчиков давления. Корпус 25 трансформатора силы служит для крепления мембраны 24, сочленения с преобразователем и выполняет роль штуцера, через который подается Измеряемое давление.
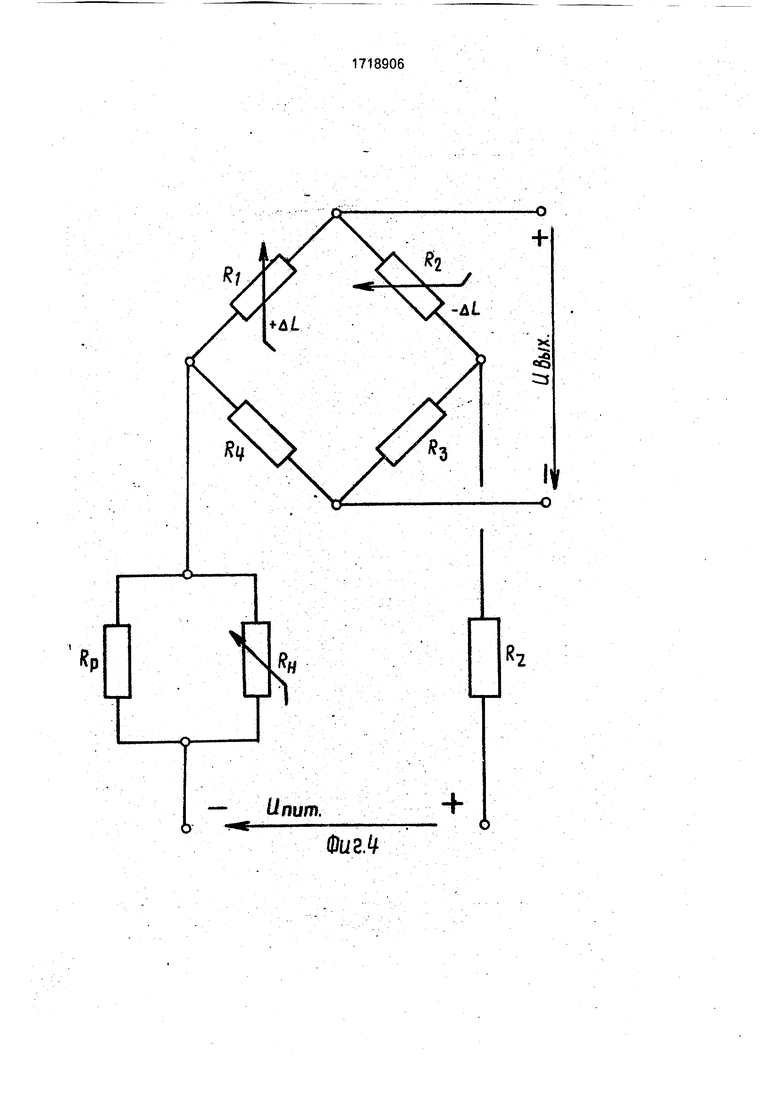
Электрическая схема преобразовательного элемента представляет собой мост Уинстона с двумя активными тензорези- стивными слоями в смежных плечах и двумя пассивными намотанными стабильными со0 противлениями в двух других плечах.
Сущность изобретения состоит в следующем.
Под воздействием измеряемого перемещения силы передатчика 13 силы упругий
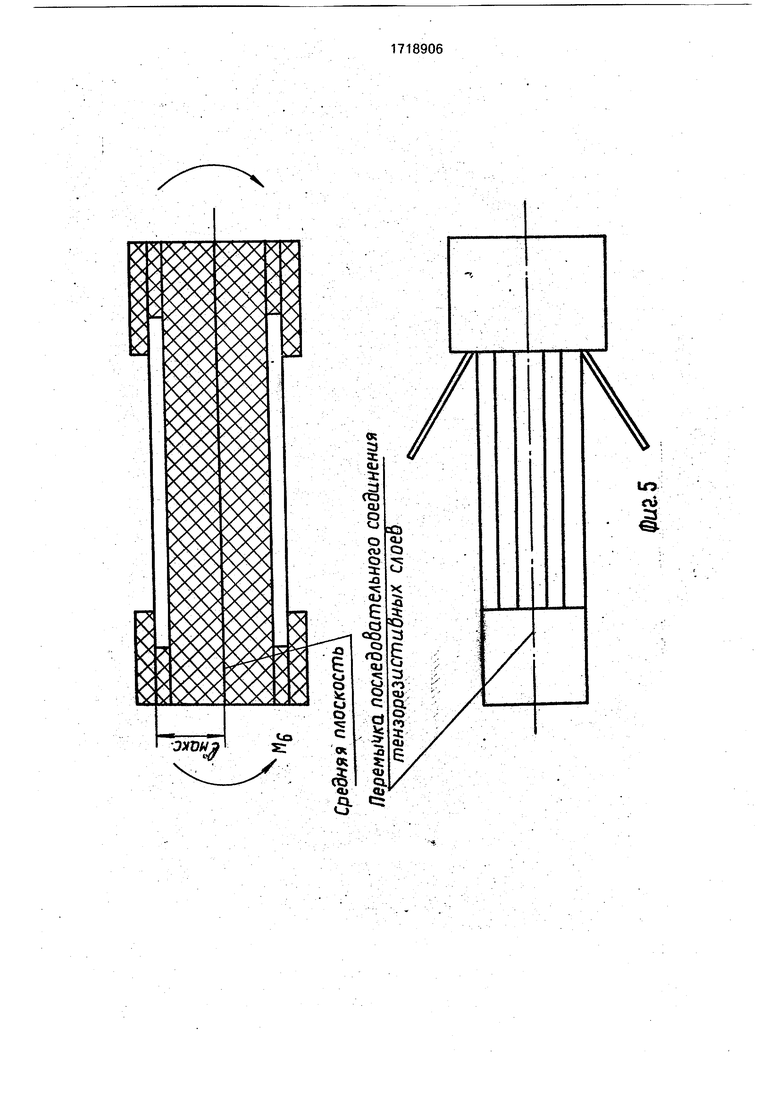
5 элемент 3 (фиг.З) подвергается прямому изгибу, т.е. изгибу относительно главной оси инерции поперечного сечения упругого элемента 3 (фиг.5). В соответствии с законами теории упругости продольная деформация
0 любого волокна с вертикальным расстоянием t от главной оси инерции выражается формулой
Mj
Ј
«,
1-Е где t-экваториальный мо-.
мент инерции площади поперечного сечения, отнесенный к главной оси инерции;
е- деформация, относительное изменение длины;
Mb - изгибающий момент;
Е - модуль Юнга.
Следовательно, продольная деформация во внешнем волокне с {макс является наибольшей, причем главная ось инерции соответствует недеформированному (средняя плоскость) волокну. Продольная деформация появляется выше или ниже деформированного волокна (в зависимости от знака ф как растяжение или сжатие. Эти положения использованы в конструкции упругого элемента 3, что позволило выполнить упругий элемент из двух пластин 4 и 5,
Выполнение упругого элемента 3 из двух пластин 4 и 5 обеспечивает возможность после нанесения или закрепления тензодатчиков на пластины 4 и 5 проводить селективный подбор двух активных плеч мостовой схемы преобразовательного элемента Ri, R2). По номинальному сопротивлению и коэффициенту тензочувствительности обеспечивают идентичность электрических, параметров, Подбор выполняется на уровне идентичности электрических параметров ±0,5%. Подобранные по электрическим параметрам.пластины собираются по средней плоскости с помощью неразъемного соединения (фиг.5). Сборка упругого элемента 3 и крепление его в держатель 2 может осуществляться с помощью синтетической связки, а также легкоплавкими силикатными стеклами и стеклоцементами (подобранными по коэффициенту линейных расширений). Поскольку в конструкции тензорезистивные датчики 6 и 7 расположены на упругом элементе 3 в продольном направлении (фиг.5), то между изгибающим моментом и изменением величины сопротивления тензорези- стивных датчиков получается следующая
A RA R зависимость:-г5- Ке+(-р-)емп.
R
AR R
„.5 , ( ARv Е ТГ Гемп-.
AR „ ,; ARV -R- KI I.E. +Нг гемп;
где R-электрическое сопротивление тензо- резистивных датчиков;
К - коэффициент тензочувствительности;
б - изменение, зависящее от температуры;:
Ri; R2 - полупроводниковые тензослои (тензометры);
R3: Ri - резисторы проволочные мотанные (с помощью R3 и RA осуществляется балансировка моста);
Rp - резистор для температурной компенсации чувствительности; 5RZ - резистор проволочный мотанный.
Вторые тензорезистивные датчики, размещенные на нижней пластине упругого элемента 3, т.е. противоположно первым, подвержены тем же температурным воздей- 0 ствиям. В них (при условии симметричного сечения) наблюдаются следующие изменения сопротивления:
AR у ./ AR4
пг- к-ГЕ-K-R-)1
5 Таким образом, получают полную температурную компенсацию полумостовой электрической схемы (фиг.4) с одновременным увеличением коэффициента чувствительности. Приведенные зависимости
0 выполняются при условии как расположения тензорезистивных датчиков, так и их идентичности номинальных сопротивлений и коэффициента тензочувствительности на уровне идентичности электрических па5 раметров ±0,5%. Следствием этого является воспроизводимость метрологических характеристик с заданными параметрами в серийном производстве. Передатчик 13 силы обеспечивает передачу силы перемеще0 ния для деформации упругого элемента 3. При воздействии полезной силы на конец упругого элемента 3 последний получает перемещение с угловым поворотом. Для этого в конструкцию введен передатчик 13 силы
5 перемещения, выполняющий роль шарнира с внутренним трением. Передатчик 13 силы перемещения выполнен в виде стержня, геометрические размеры которого рассчитаны на устойчивость стержня. При этом
0 расчет ведется таким образом, что при преобразовании поступательного движения мембраны 24 (при воздействии давления Р) во вращательно-поступательное движение конца упругого элемента 5 были минималь5 ные энергетические затраты на изгиб стержня передатчика 13 силы. Последний обеспечивает передачу силы для деформации упругого элемента 3, не теряя своей устойчивости. Жесткое крепление передат0 чикасилы к упругому элементу 3 и мембране 24 (трансформатору силы) обеспечивает работу элемента в знакопеременном режиме, что позволяет проводить измерения как из- бьпочного давления тж и вакуумметричесмого. При пе5 рэгрузочных значениях избыточного давления упругий элемент Зупираетв гермоеывод 16 передатчик 13 сипы (стержень теряет устойчивость, чем предохраняет упругий элемент от разрушения). Введение в устройство конструктивного решения передатчика 13 силы перемещения позволяет повысить чувствительность и метрологические характеристики линейноти предлагаемого устройства. Одновреенно можно обезопасить конструкцию при положительных значениях перегрузки от разрушения.,
Преобразовательный элемент датчика 5 работает следующим образом.
Под воздействием силы давления Р, поаваемого от объекта измерения (например, избыточное давление из внутренней полости манжетки для аппарата автоматическо- 10 го измерения артериального давления), упругая мембрана 24 (фиг.З) получает поступательное перемещение ее центра жестко закрепленного с передатчиком 13 силы,ко- торый поступательное перемещение мемб- 15 раны преобразует во вращатель- но-поступательное движение подвижного конца консольно закрепленного упругого элемента 3. Под воздействием измеряемого перемещения силы тензорези- 20 стивные датчики 6 и 7 упругого элемента 3 подвергаются деформации сжатия и растяжения иизменяютсвоесопротивление. Приэтомсизме- рительной диагонали мостовой схемы снимается выходное напряжение, которое 25 прямо пропорционально прогибу упругого элемента 3 и подается на вторичный измерительный канал прибора.
Предлагаемое устройство позволяет использовать единую кинематическую схему 30
построения датчиков, единый метод преобразования - резистивный, при этом эффективно решается проблема унификации.
. Формул а-изо-брете кия
1. Устройство для оценки вакуумного крепления протеза бедра, содержащее заглушку со штуцером, чувствительный элемент, тензодатчики и преобразователь давления, о тличающеес я тем, что, с целью повышения точности и расширения области измерения в динамике процесса ходьбы в соответствии с фазами шага, в него введен стержень с шарниром, чувствительный элемент выполнен из двух неразъемных пластин, каждая из которых снабжена элементами жесткости в виде соединенных прямоугольных накладок, закрепленных в держателе со стороны тензодатчиков, расположенных на поверхности упругого элемента, причем с подвижным концом упругого элемента одним концом жестко соединен стержень, вторым концом соединенный с преобразователем давления.
1 2. Устройство по п.1, о т л и ч а ю ще е- с я тем, что упругий элемент выполнен из неэлектропроводного материала с коэффициентом линейного расширения, равным коэффициентам линейного расширения материала держателя и тензодатчиков.



| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик деформации | 2016 |
|
RU2658089C1 |
| Способ и устройство тензоэлектрического преобразования | 2017 |
|
RU2661456C1 |
| ТЕНЗОРЕЗИСТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2586259C1 |
| ДАТЧИК ИМПУЛЬСНЫХ ДАВЛЕНИЙ ЖИДКОСТНЫХ, ГАЗООБРАЗНЫХ И СМЕШАННЫХ СРЕД С НЕСТАЦИОНАРНОЙ ТЕМПЕРАТУРОЙ | 2011 |
|
RU2460049C1 |
| Способ изготовления тензорезистивного датчика, выполненного в виде тканого полотна из проводящих углеродных волокон и диэлектрических волокон | 2021 |
|
RU2800738C2 |
| ТЕНЗОРЕЗИСТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2586083C1 |
| ИНТЕГРАЛЬНЫЙ ДАТЧИК УСКОРЕНИЯ | 2016 |
|
RU2639610C1 |
| ВСЕСОЮЗНАЯ 1 | 1973 |
|
SU363879A1 |
| Интегральный датчик давления | 1991 |
|
SU1796929A1 |
| ДВУХМЕМБРАННЫЙ ТЕНЗОПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 1991 |
|
RU2101688C1 |


22
18
20
Шг.1
гч
$иг.2
я Г
ФигМ
U
ni
aфиг. 6
f
/
ho
/M
V
| Устройство для оценки вакуумного крепления протеза бедра | 1989 |
|
SU1648448A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
