Изобретение относится к измерительной технике, в частности к контрольно-измерительным устройствам для измерения параметров зубчатых колес.
Известно устройство для бесконтактной аттестации преобразователей угла, содер- жащее контролируемый преобразователь, отметчик одного оборота, кольцевой лазер, электромагнитную муфту, электропривод, блок логики, регистр памяти, два реверсивных счетчика и регистрирующее устройство. Контролируемый преобразователь, отметчик одного оборота, кольцевой лазер, электромагнитная муфта расположены на одной оси с электроприводом. Контролируемый
преобразователь угла вращают с постоянной угловой скоростью и заполняют интервал между двумя последовательными сигналами от преобразователя импульсами кольцевого лазера. Вычитая число импульсов от кольцевого лазера в промежутке между первым и вторым сигналами преобразователя из числа импульсов от кольцевого лазера между вторым и третьим и т.д. сигналами преобразователя, судят о точностных характеристиках преобразователя угла.
Недостатком известного устройства является то, что оно не учитывает погрешность, вносимую угловым вращением
О 00 00
о
Земли, влияющую на число импульсов от кольцевого лазера за оборот.
Известно устройство для контроля зубчатых колес с применением кольцевого лазера, содержащее электропривод, контролируемое колесо, отметчик одного оборота, кольцевой лазер, электромагнитную муфту, осветитель с проектирующей щелью, оптико-электронный преобразователь с приемной щелью, электронный блок обработки информации и регистрирующее устройство. Контролируемое колесо, отметчик одного оборота, кольцевой лазер, электромагнитная муфта расположены на одной оси сэлектроприводом. Контролируемое ко- лесо вращают с равномерной угловой скоростью, заполняют интервал между двумя последовательными сигналами преобразователя импульсами от кольцевого лазера и по этим результатам судят о фактических значениях параметров зубчатых колес, как то: значение номинального окружного шага накопленной погрешности измерения колеса и т.д.
Недостатком известного устройства является погрешность, обусловленная влия- нием углового вращения Земли, вносящая изменение в количество импульсов от кольцевого лазера за оборот.
Целью изобретения является повышение точности измерения окружного шага и накопленной погрешности зубчатых колес.
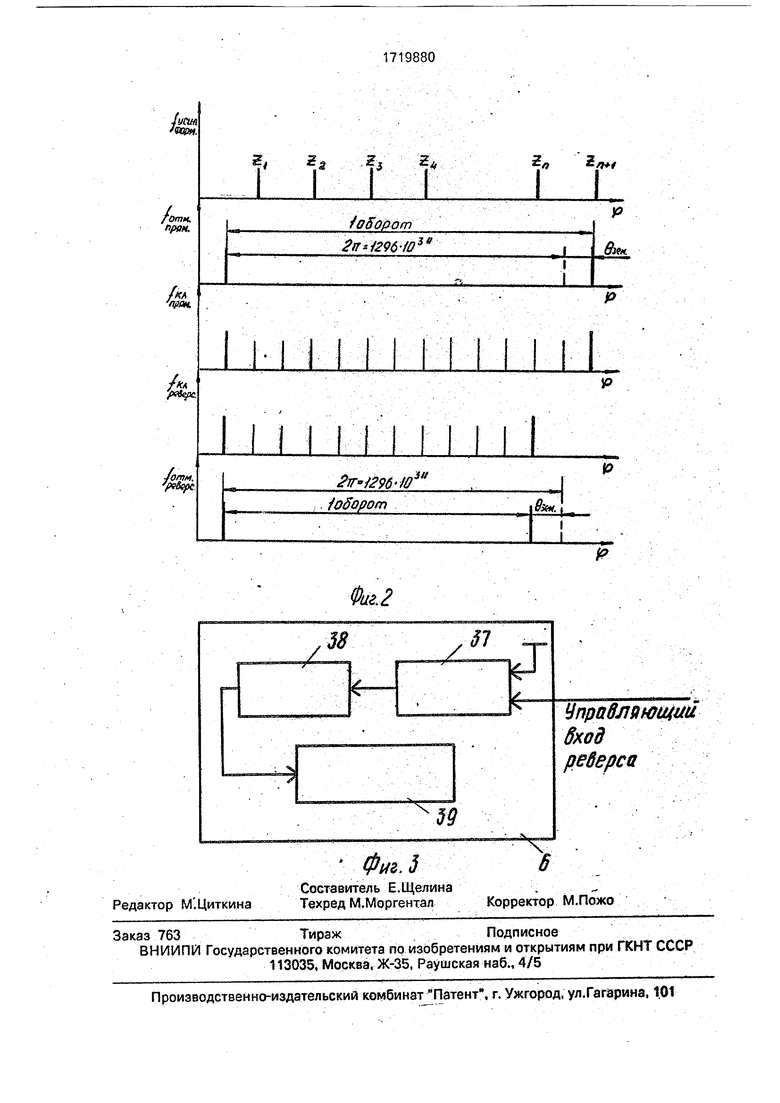
На фиг. 1 показана блок-схема устройства; на фиг. 2 - диаграмма формирования прямого и реверсивного сигналов; на фиг. 3 - блок-схема стабилизированного электро- привода с блоком управления реверсом.
Устройство для контроля окружного шй- га и накопленной погрешности зубчатых колес, учитывающее погрешность, вносимую угловым вращением Земли, содержит (фиг. 1) осветитель 1 с проектирующей щелью, оптико-электронный преобразователь 2 с приёмной щелью, контролируемое зубчатое колесо 3, кольцевой лазер 4, отметчик 5 одного оборота, стабилизированный электро- привод б с блоком управления, электронный блок 7 обработки информации, блок 8 компенсации углового вращения Земли, регистрирующее устройство 9. В состав электронного блока 7 обработки ин- формации .входят
усилитель-формирователь 10 импульсов, первый счетчик 11 зубьев, второй счетчик 12 зубьев, счетчик 13 числа зубьев колеса на один больше, перв ая логическая схема И 14, триггер 15. счетчик 16 до двух, вторая логическая схема И-17, регистр 18 импульсов кольцевого лазера для числа зубьев колеса на один больше, регистр 19 импульсов кольце во го-лазера за один полный оборот отметчика, схема 20 сравнения, делитель 21 на число зубьев колеса, регистр 22 эталоннрго числа импульсов, логический блок 2.3, первое оперативное запоминающее устройство 24, второе оперативное запоминающее устройство 25, логическая схема НЕ 26, вычитающий блок 27, регистр 28 констант, умножитель 29. В состав блока 8 компенсации углового вращения Земли входят логическая схема И 30, регистр 31 импульсов кольцевого лазера за один полный оборот отметчика при реверсе, суммирующий блок 32, вычитающий блок 33, первый делитель 34, второй делитель 35, блок-36 вычисления компенсационного коэффициента углового вращения Земли.
Учет суточного вращения Земли нашел применение в динамическом методе гидро- компасирования, в котором если вектор угловой скорости, направление которого определяется (например, вектор угловой скорости вращения Земли), не совпадает с осью механического сканирования, то на выходе кольцевого лазера появляется сигнал ошибки. Учесть ошибку от вращения кольцевого лазера при суточном вращении Земли помогло введение в устройство блока компенсации вращения Земли. Количество импульсов на выходе кольцевого лазера можно представить в виде
N K (б р+Озем),
где N - число импульсов на выходе кольцевого лезера;
. ©вр- угол поворота кольцевого лазера;
Озем угол поворота Земли;
К- коэффициент пропорциональности.
Тогда для полного оборота кольцевого лазера при прямом вращении имеем Мпр К (2 ж + Эзем), для обратного враще- ния кольцевого лазера N06p. К (2гг-0Ъем)и
., МПр + Мобр. Л 4Я
Nnp N06p. зен 2 К
Кз
2л: +
зем.
2л:
где Кз коэффициент компенсации углового вращения Земли.
Алгоритм решения этой задачи реализован в устройстве для контроля и накопленной погрешности зубчатых колес в виде блока компенсации углового вращения Земли. Этот блок в составе уел ройства работает следующим образом.
Перед началом непосредственного измерения параметров зубчатого колеса приводится определение коэффициента компенсации углового вращения Земли для данного местоположения устройства, для чего узел, на котором расположены зубча- тое колесо, кольцевой лазер, отметчик одного оборота, стабилизированный .электропривод с блоком управления, вращают с постоянной угловой скоростью в прямом направлении (например, по часовой. стрелке), тогда в электронном блоке с выхода отметчика 5 одного оборота на вход счетчика 16 до двух поступит импульс о начале отсчета. Выход счетчика до двух подключен к первому входу второй логической схемы И 17, на второй вход этой же схемы начнут поступать импульсы кольцевого дазера 4, с выхода второй логической схемы И 17 импульсы кольцевого лазера поступают в регистр 19 импульсов кольцевого лазера за один полный оборот отметчика. В регистр 19 импульсы закончат поступать в том случае, когда отметчик 15 сделает полный оборот. С выхода регистра 1.9 сигналы поступают на вторые входы суммирующего 32 и вычитаю- щего 33 блоков, расположенных в блоке 8 компенсации влияния углового вращения Земли. После поступления информации в блоки 32 и 33 логический блок 23, расположенный в блоке 7, выдает команду на схему управления стабилизированного электропривода 6 на реверс, которая является управляющей командой, поступающей на третий вход схемы И 30 блока компенсации и запрещающей запись импульсов на вто рой вход регистра 19. Зубчатое колесо, кольцевой лазер и отметчик одного оборота в этом случае вращаются стабилизированным электроприводом с блоком управления в обратном направлении с постоянной утло-. вой скоростью. Тогда импульс с выхода отметчика 5 одного оборота поступает на вход счетчика 16 до двух (блок 7), а выход счетчика до двух подключен к первому входу логической схемы И 30 (блок 8). На второй вход схемы 30 поступают импульсы от кольцевого лазера 4 при реверсе. Выход логической схемы И блока 8 соединен с входом регистра 31 импульсов кольцевого лезера за один полный оборот отметчика при ре- верее. Импульсы в блок 31 закончат посту пать, когда отметчик 5 сделает полный оборот. Выход регистра 31 под ключей к первым входам суммирующего 32 и вычитающего 33 блоков. Выход суммирующего блока подключен к входу первого делителя 34, который осуществляет операцию деления суммы (Nnp + Мобр) на 4лг. Частное от деления первого делителя поступает на
второй вход второго делителя 35, а на первый вход поступает разность (Мпр - N06p) с выхода блока 33. Во втором делителе происходит деление содержимого блока 33 на содержимое блока 34. Далее содержимое делителя 35 поступает на вход блока 36 формирования компенсационного коэффициента углового вращения Земли, в котором осуществляется операция вычисления
к- 2 я + €W
wIn
Выход блока 36 подключен к пятому входу регистра 29 констант (блок 7). На вход регистра 28 подается числовое значение коэффициента Кз.
Далее производится непосредственное измерение окружного шага и накопленной погрешности зубчатых колес. Стабилизированный электропривод 6 с блоком управления вращает контролируемое зубчатое колесо 3 вместе с кольцевым лазером 4 и отметчиком 5 одного оборота с постоянной угловой скоростью в прямом направлении. Проектирующая щель осветителя 1 формирует световой штрих, который, отражаясь от профиля зуба контролируемого колеса, через приемную щель попадает на светочувствительную поверхность оптико-элёкт- рон.ного преобразователя 2. Сигнал, принятый оптико-электронным преобразователем, поступает на первый информационный вход электронного блока 7 обработки информации, которым является вход усилителя-формирователя 10. С выхода усилителя-формирователя импульсы поступают на входы первого и второго счетчиков 11 и 12 зубьев колеса и на вход счетчика 13 зубьев колеса на один больше. Импульсы от кольцевого лазера 4 поступают на второй информационный вход электронного блока 7, которым является второй вход первой логической схемы И 14, и второй вход второй логической схемы И 17, как было указано выше. Сигналы от отметчика 5 данного оборота поступают на третий информационный вход электронного блока 7, которым является вход счетчика 16 до двух, и первый вход триггера 15. Инверсный выход триггера 15 соединен с третьим входом первой логической схемы И 14 и входом логического блока 23. Сигнал с выхода триггера, поступающий .на вход логического блока, подготавливает логический блок к работе. После получения сигнала с триггера логический блок со своего первого выхода выдает команду в первое оперативное запоминающее устройство 24 на запись информации. Выход счетчика 13 числа зубьев колеса на один больше подключен к второму входу первого счетчика 11
зубьев и первому входу первой логической схемы И 14. Выход первой логической схемы И 14 подключен к входу регистра 18 импульсов кольцевого лазера для числа зубьев колеса на один больше. Запись информации в регистр 18 прекращается при полном обороте зубчатого колеса. Информация с первой логической схемы И 14 поступает также на шину данных первого оперативного запоминающего устройства 24. На адресную шину устройства 24 приходят .сигналы от первого счётчика 11 зубьев. Таким образом происходит запись данных в первое оперативное запоминающее устройство 24.
Выход счетчика 16 до двух подключен к первому входу второй логической схемы И 17, к второму входу схемы И 17, как указывалось выше, подключен выход кольцевого лазера. Импульсы с выхода схемы И 17 подаются на вход регистра 19 импульсов за полный оборот отметчика. Выход регистра
19соединен с входом делителя 21 на число зубьев, а выход делителя 21 - с входом регистра 22 эталонного числа импульсов. Информация регистра 22 поступает на третий вход вычитающего блока 27. Содержимое регистра 18 вводится на первый вход схемы
20сравнения, з на второй вход схемы 20 поступает содержимое регистра 19. В схеме 20 происходит сравнение числа импульсов кольцевого лазера, записанного в регистрах 22 и 31. При совпадении числа импульсов в обоих регистрах сигнал со схемы сравнения поступает на второй вход триггера 15 и он
. возвращается в исходное состояние, далее этотже сигнал приходит на вход считывания в первое оперативное запоминающее устройство 24. на второй вход вычитающего блока 27, на вход логической схемы НЕ 26, которая выдает сигнал на запись во в торое оперативное запоминающее устройство 25. Так же информация со схемы сравнения подается и на второй счетчик 12 зубьев, который подключен своим выходом к адресной шине второго оперативного запоминающе го устройства 25. После поступления команды на считывание в первое оперативное запоминающее устройство 24 со схемы сравнения на первый вход вычитающего блока 27 поступает содержимое ячеек памяти первого оперативного запоминающего устройства, из которого происходит вычитание эталонного числа импульсов, введенного в вычитающий блок на его третий вход. Далее происходит запись информации с выхода вычитающего блока на шину данных второго оперативного запоминающего устройства 25. После окончания записи логический блок выдает команду на считывание
содержимого устройства 25 и содержимого регистра 28 констант, в который предварительно заносятся число z зубьев колеса ia второй вход, модуль m колеса на третий
вход, число угловых секунд в 360° на четвертый вход, на пятый входе блока 36 вводится компенсационный коэффициент углового вращения Земли К3Л. Содержимое блока 28 поступает на первый вход умножителя 29, а
содержимое блока 25- на второй. Информация с выхода умножителя поступает на регистрирующее устройство 9.
Пример выполнения блок-схемы стабилизированного электропривода с блоком
управления реверсом показан на фиг. 3. Он состоит из логической схемы ИЛИ 37, блока 38 управления и стабилизированного электропривода 39.
Первый вход логической схемы ИЛИ
замкнут на корпус, а второй через вход стабилизированного привода с-блоком управления связан с управляющим выходом реверса электронного блока обработки информации (фиг. 2,3). Логическая схема ИЛИ
своим выходом подключена к входу блока 38 управления реверсом, а он. в свою очередь, своим выходом подключен к входу стабилизированного электропривода 39, При вращении привода в прямом направлении блок
управления не влияет на работу привода, однако при поступлении команды на реверс от электронного блока обработки информации логическая схема ИЛИ 37 пропускает сигнал высокого уровня на блок управления
реверсом и он выдает команду в стабилизированный электропривод на реверс.
Использование блока компенсации влияния углового вращения Земли позволит повысить точность измерений параметров
зубчатых колес с применением кольцевого лазера, Известно, что при получении импульсов от кольцевого лазера за его. полный оборот их число будет отличаться для различных местоположений кольцевого лазера
относительно Земли, что ведет к погрешности измерений. Влияние указанного блока позволит исключить ошибку, вносимую угловым вращением Земли.
Форм у ла изобретения
1. Устройство для контроля окружного шага и накопленной погрешности зубчатых колес, содержащее осветитель с проектирующей щелью, отметчик одного оборота,
кольцевой лазер, оптико-электронный преобразователь с приемной щелью, электронный блок обработки информации, регистрирующее устройство, электропривод, отличающееся тем, что, с целью повышения точности измерения, в неговведен блок компенсации погрешности стремя информационными и одним управляющим входами и одним информационным выходом, а электропривод выполнен в виде стабилизированного электропривода с блоком управления реверсом с одним управляющим входом, причем блок компенсации своим первым информационным входом связан с выходом кольцевого лазера, вторым и третьим информационными и управ- ляющим входами с соответствующими выходами электронного блока обработки информации, а информационным выходом связан с соответствующим входом электронного блока обработки информации,- уп- равляющий вход стабилизированного электропривода связан с соответствующим выходом электронного блока обработки информации.
2. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что блок компенсации выполнен в виде логической схемы И, регистра импульсов кольцевого лазера за один полный оборот отметчика одного оборота, суммирующего блока, вычитающего блока, первого делителя, второго делителя, блока вычисления, причем выход логической схемы И соединен с входом регистра импульсов кольцевого лазера за один полный оборот отметчика, выход вышеупомянутого регистра соединен с первым входом суммирующего блока и первым входом вычитающего блока, выход суммирующего блока подключен к входу пе рвого делителя, а к первому входу второго делителя подключен выход вычитающего блока, выход первого делителя подключен к второму входу второго-делителя, выход второго делителя соединен с входом блока вычисления, информационный выход этого блока подключен к пятому входу регистра констант электронного блока, первый вход логической схемы И через второй информационный вход блока компенсации связан с выходом счетчика до двух электронного блока, вторые входы суммирующего и вычитающего блоков через третий информационный вход блока компенсации подключены к регистру импульсов кольцевого лазера за один полный оборот отметчика электронного блока, второй вход логической схемы И через первый информационный вход логической схемы И, через управляющий вход связан с вторым выходом логического блока, с вторым выходом логического блока электронного блока.
3,Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что в электронном блоке обработки информации введен второй вход в регистр импульсов кольцевого лазера за полный оборот отметчика, который связан с вторым выходом логического блока.
4.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что стабилизированный электропривод с блоком управления реверсом выполнен в виде логической схемы ИЛИ, блока управления и стабилизированного электропривода, причем выход логической схемы ИЛИ соединен с входом блока управления, а выход блока управления подключен к входу стабилизированного электропривода, второй вход логической схемы ИЛИ как управляющий вход соединен с выходом логического блока, находящегося в электронном блоке, а первый вход схемы ИЛИ замкнут на корпус.
Cvl
CO
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля окружного шага зубчатых колес | 1989 |
|
SU1742619A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС НА ОСНОВЕ МЕТОДА ПОЛЯРНЫХ КООРДИНАТ | 2010 |
|
RU2446381C1 |
| Устройство для комплексного контроля зубчатых колес | 1983 |
|
SU1291820A1 |
| Устройство для измерения среднеинтегральных давлений в цилиндре поршневой машины | 1990 |
|
SU1830473A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU898833A1 |
| Отметчик одного оборота вращающегося кольцевого лазера с оптическим смесителем | 1991 |
|
SU1835049A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1988 |
|
SU1585664A1 |
| Устройство для контроля зубчатых колес | 1983 |
|
SU1113665A1 |

Изобретение относится к измерительной технике, в частности к контрольно-измерительным устройствам для измерения параметров зубчатых колес. Цель изобретения - повышение точности измерения окружного шага и накопленной погрешности зубчатых колес за счет включения в устройство блока компенсации погрешности, вносимой угловым вращением Земли, имеющего три информационных входа, один управляющий вход, один информационный выход и выполнение электропривода в виде стабилизированного электропривода с блоком управления реверсом с одним управляющим входом. 3 з.п. ф-лы, 3 ил. 4J W е
| Скрибанов Е.В | |||
| Устройство для аттестации преобразователей угла | |||
| - Измерительная техника, 1981, NJ 3, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Скрибанов Е.В | |||
| Применение кольцевого лазера для контроля и управления точностью изготовления зубчатых колес | |||
| - Измерительная техника, 1978 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Лукьянов Д.П | |||
| Лазерные измерительные системы | |||
| М.: Радио и связь, 1981, с | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1916 |
|
SU282A1 |
