Изобретение относится к измерительной технике, а именно к средствам контроля геометрических параметров сопряженных зубчатых колес, и может быть использовано для определения кинематической погрешности зубчатой передачи при ее вращении со скоростями, соответствующими рабочему Диапазону угловых скоростей вращения входного и выходного валов.
Цель изобретения - повышение точности при измерении кинематической погрещ- юсти передач с большими взаимно прос- | ыми числами зубьев сопряженных колес, что достигается формированием от общего генератора двух опорных частот, пропорциональных этим числам в передаточном отношении, заполнением интервала между импульсами каждого из датчиков соответствующей опорной частотой, вычислением разности накопленных за каждый интервал чисел импульсов в сумматоре и преобразованием полученной разности в величину, пропорциональную погрешности, выраженной в единицах измерения угла, в перемножителе путем деления разности на число импульсов, накопленное в измерителе периода между двумя импульсами первого датчика, и умножения результата на масштабный коэффициент.
На чертеже представлена электрическая схема устройства, выполненного на логических элементах больщой и средней степени интеграции.
Устройство для измерения кинематической погрешности зубчатых передач содержит дискретные датчики 1 и 2 угла поворота входного и выходного валов зубчатой передачи, стабилизированный генератор 3, два формирователя 4 и 5 импульсов, два основных счетчика 6 и 7, каждый из которых своим входом соединен с выходом одного из формирователей 4 или 5 импульсов, два регистра 8 и 9, информационные входы которых соединены соответственно с выходами основных счетчиков 6 и 7, запоминающий блок 10, регитратор И, два преобразователя 12 и 13 частоты, входы которых соединены с генератором 3, а выходы - соответственно со входами формирователей 4 и 5 импульсов, сумматор 14, входы которого соединены соответственно с выходами регистров 8 и 9, а выход - со входом запоминающего блока 10, перемножитель 15, первый информационный вход которого соединен с выходом запоминающего блока 10, а выход - с регистратором 11, измеритель 16 периода, счетный вход которого соединен с выходом первого формирователя 4, а выход - с вторым информационным входом перемножителя 15, пять одно- вибраторов 17-21, три двухвходовые и одну трехвходовую схемы И-НЕ 22-25, инвертор 26, семь триггеров 27-33 и реверсивный счетчик 34, выход первого датчика 1 соединен с прямыми входами одновибраторов 17 и 18, прямой выход первого одновиб- ратора 17 соединен с инвертирующим входом третьего одновибратора 19, инверсный выход второго одновибратора 18 соединен
с первым входом первой двухвходовой схемы И-НЕ 22, прямой и инверсный выходы третьего одновибратора 19 соединены соответственно с первым входом второй двухвходовой схемы И-НЕ 23 и R-входом первого
триггера 27, соединенным с С-входом второго триггера 28, инвертирующий вход и инверсный выход четвертого одновибратора 20 соединены соответственно с прямым выходом третьего триггера 29, соединенным с вторым входом первой двухвходовой схемы И-НЕ 22 и с входной щиной сложения реверсивного счетчика 34, соединенной с S-входами первого и четвертого триггеров 27 и 30 и С-входом пятого триггера 31, инвертирующий вход и инверсный выход пятого одновиб0 ратора 21 соединены соответственно с инверсным выходом четвертого триггера 30, соединенным с управляющим входом второго регистра 9, и с первым входом трехвходовой схемы И-НЕ 25, соединенным с управляющими входами запоминающего блока 10 и перемно жителя 15, выход первой двухвходовой схемы И-НЕ 22 соединен с / -входом третьего триггера 29, выход второй двухвходовой схемы И-НЕ 23 соединен с щиной вычитания реверсивного счетчика 34, выход
Q третьей двухвходовой схемы И-НЕ 24 соединен с 7 -входом четвертого триггера 30, выход трехвходовой схемы И-НЕ 25 соединен с -входом шестого триггера 32, выход смены знака реверсивного счетчика 34 соединен с / -входами триггеров 28 и 31,
g выход второго датчика 2 соединен с С-входа- ми триггеров 29 и 33, вход и выход инвертора 26 соединены соответственно с прямым выходом седьмого триггера 33, соединенного с -входом реверсивного счетчика 34, и с -входом седьмого триггера 33, соединенным
0 с S-входами триггеров 28 и 31, инверсный выход первого триггера 27 соединен с С-входом шестого триггера 32, прямой выход второго триггера 28 соединен со строби- рующим входом первого формирователя 4 и вторым входом второй двухвходовой схемы И-НЕ 23, прямой выход четвертого триггера 30 соединен с первым входом третьей двухвходовой схемы И-НЕ 24, а второй вход этой схемы И-НЕ 24 - с выходом второго . формирователя 5 импульсов, прямой выход
Q пятого триггера 31 соединен с D-входом второго триггера 28, прямой и инверсный выходы шестого триггера 32 соединены соответственно с вторым входом трехвходовой схемы И-НЕ 25 и управляющими входами измерителя 16 периода и первого регист5 ра 8, а инверсный выход седьмого триггера 33 соединен с управляюдщими входами первого и второго основных счетчиков 6 и 7 S-входами триггеров 30 и 32.
Устройство для измерения кинематической погрешности зубчатых передач работает следующим образом.
Дискретные датчики 1 и 2 угла поворота устанавливают на входной и выходной валы зубчатой передачи так, чтобы угловая скорость вращения датчика 1 была больше угловой скорости вращения датчика 2. Приводят во вращение зубчатую передачу от привода, обеспечивающего плавное равноДля перевода этих значений числа на выходе сумматора в единицы измерения угла в измерителе 16 периода производится подсчет числа импульсов, укла- g дывающихся в интервал между двумя импульсами с датчика 1, и результат, записанный в запоминающем блоке 10, делится на это число и умножается на масщтаб- ный коэффициент. С выхода перем ноживале времени измерения, выраженной в единицах измерения угла.
теля 15 на регистратор 11 поступает число,
мерное вращение входного вала. Сигнал О пропорциональное кинематической погреш- со стабизированного генератора 3 поступаетности зубчатой передачи в текущем интерна преобразователи 12 и 13, выполненные в виде либо делителей частоты, либо умножителей частоты с фазовой автоподстройкой частоты. Коэффициенты преобразования , преобразователей 12 и 13 выбраны целочисленными, причем их отношение должно быть меньше единицы и равняться передаточному отношению зубчатой передачи
Реверсивный счетчик 34 предотвращает сбой устройства в тех случаях, когда на один интервал времени между импульсами с датчика 2 приходится несколько, например, от 2 до 15 импульсов с датчика 1.
в направлении от датчика 2 к датчику 1.
Вследствие этого при отсутствии кикематичес- 20 Предлагаемое устройство позволяет измекой погрешности зубчатой передачи на вы- рять кинематическую погрешность не только
ходах этих преобразователей будут частоты
следования импульсов, пропорциональные
угловым скоростям вращения соответствуюпри установившейся скорости вращения входного вала, но и на переходных процессах. Устройство работоспособно в широком
щих датчиков 1 и 2. Эти импульсы посту- 25 интервале угловых скоростей вращения дат- пают на входы формирователей 4 и 5, где чиков 1 и 2. Например, при формировании происходит выравнивание формы импуль- на выходе одного из преобразователей сов до заданных величин по длительности12 и 13 частоты до 50 МГц при времени
и по амплитуде. Основные счетчики 6 и 7 цикла перемножителя 15 порядка 1 мкс в отсутствие кинематической погрешностии при числе импульсов с датчика 1 около
накапливают равные количества импульсов зо 2500 за оборот устройство работоспособно за счетный интервал, который формируетсяпри скорости вращения вала с датчиком 1
для основного счетчика 6 датчиком I, а для основного счетчика 7 - датчиком 2. При этом основной счетчик 7 работает непрерывно, а основной счетчик 6 прекращает счет после прохождения интервала, 35 новном счетчике 6 или 7. равного времени прохождения одного дискретного щага датчиком 1. После приходаУстройство может быть использовано для второго импульса с датчика 1 на строби- контроля кинематической погрешности зуб- рующий вход формирователя 4 импульсов чатых передач с большими взаимно прос- приходит запрещающий сигнал с выхода тыми числами зубьев сопряженных колес. второго триггера 28, который будет снят В этом случае точность повышается по
сравнению с точностью других устройств, использующих непосредственное деление последовательностей импульсов, поступающих с выходов датчиков угла поворота.
до 400 об/с. При минимальной скорости вращения 1 об/мин это устройство имеет наибольшую разрешающую способность, так как при этом накоплено 2 импульсов в остолько с приходом очередного импульса с датчика 2. Информация с выходов основных счетчиков 6 и 7 переписывается в регистры 8 и 9 по фронту импульсов записи.
приходящих с выходов триггеров 32 и 30. в несколько порядков, а в абсолютных Сумматор 14 вычисляет разность междузначениях может определяться с точностью
содержимым регистров 9 и 8, для чего со-от единиц до долей угловых секунд,
держимое регистра 8 переписывается в сумматор 14 в инверсном коде с соответствую-Формула изобретения щих выходов. Результат из сумматора 14 переписывается в запоминающий блок по сигналу, фронт которого задержан относительно фронта сигнала с датчика 2 на интервал времени, достаточный для полного окончания вычитания.
При наличии кинематической погрешности в основных счетчиках 6 и 7 накоплены различные числа импульсов и в запоминающий блок 10 заносится разность этих чисел. .
50 Устройство для измерения кинематической погрешности зубчатых передач, содержащее дискретные датчики угла поворота входного и выходного валов зубчатой передачи, стабилизированный генератор, два формирователя импульсов, два основных
55
счетчика, каждый из которых своим входом соединен с выходом одного из формирователей импульсов, два регистра, информационные входы которых соединены соответДля перевода этих значений числа на выходе сумматора в единицы измерения угла в измерителе 16 периода производится подсчет числа импульсов, укла- дывающихся в интервал между двумя импульсами с датчика 1, и результат, записанный в запоминающем блоке 10, делится на это число и умножается на масщтаб- ный коэффициент. С выхода перем ножителя 15 на регистратор 11 поступает число,
вале времени измерения, выраженной в единицах измерения угла.
Реверсивный счетчик 34 предотвращает сбой устройства в тех случаях, когда на один интервал времени между импульсами с датчика 2 приходится несколько, например, от 2 до 15 импульсов с датчика 1.
2500 за оборот устройство работоспособно при скорости вращения вала с датчиком 1
новном счетчике 6 или 7. Устройство может быть использовано для контроля кинематической погрешности зуб- чатых передач с большими взаимно прос- тыми числами зубьев сопряженных колес. В этом случае точность повышается по
до 400 об/с. При минимальной скорости вращения 1 об/мин это устройство имеет наибольшую разрешающую способность, так как при этом накоплено 2 импульсов в осФормула изобретения
Устройство для измерения кинематической погрешности зубчатых передач, содержащее дискретные датчики угла поворота входного и выходного валов зубчатой передачи, стабилизированный генератор, два формирователя импульсов, два основных
счетчика, каждый из которых своим входом соединен с выходом одного из формирователей импульсов, два регистра, информационные входы которых соединены соответственно с выходами основных счетчиков, запоминающий блок и регистратор, отличающееся тем, что, с целью повышения точности при измерении погрешности передач с большими взаимно простыми числами зубьев, оно снабжено двумя преобразователями частоты, входы которых соединены с генератором, а выходы - соответственно с входами формирователей импульсов, сумматором, входы которого соединены соответственно с выходами регистров, а выход - с входом запоминаюш,его блока, перемножителем, первый информационный вход которого соединен с выходом запоминающего блока, а выход - с регистратором, измерителем периода, счетный вход которого соединен с выходом первого формирователя, а выход - с вторым информационным входом перемножителя, пятью одновибра- торами, тремя двухвходовыми и одной трех- входовой схемами И-НЕ, инвертором, семью триггерами и реверсивным счетчиком, выход первого датчика соединен прямыми входами первого и второго одновибраторов, прямой выход первого одновибратора соединен с инвертирующим входом третьего одновибратора, инверсный выход второго одновибратора соединен с первым входом первой двухвходовой схемы И-НЕ, прямой и инверсный выходы третьего одновибратора соединены соответственно с первым входом второй двухвходовой схемы И-НЕ и с -входом первого триггера, соединенным с С-входом второго триггера, инвертирующий вход и инверсный выход четвертого одновибратора соединены соответственно с прямым выходом третьего триггера, соединенным с вторым входом первой двухвходовой схемы И-НЕ, и с входной шиной сложения реверсивного счетчика, соединенный с S-входами первого и четвертого триггеров и С-входом пятого триггера, инвертирующий вход и инверсный выход пятого одновибратора соединены соответственно с инверсным выходом четвертого триггера, соединенным с управляющим входом второго регистра, и с первым входом трехвходовой схемы И-НЕ, соединенным с управляющими входами запоминающего блока и перемножителя, выход первой двухвходовой схемы И-НЕ соединен с / -входом третьего триггера, выход второй двухвходовой схемы И-НЕ соединен с щиной вычитания реверсивного счетчика, выход третьей
0 двухбходовой схемы И-НЕ соединен с / -вхо- дом четвертого триггера, выход трехвходовой схемы И-НЕ соединен с / -входом щес- того триггера, выход смены знака реверсивного счетчика соединен с / -входами
g второго и пятого триггеров, выход второго датчика соединен с С-входами третьего и седьмого триггеров, вход и выход инвертора соединены соответственно с прямым выходом седьмого триггера, соединенного с / -вхо- дом реверсивного счетчика, и с / -входом
0 седьмого триггера, соединенным с S-входами второго и пятого триггеров, инверсный выход первого триггера соединен с С-входом шестого триггера, прямой выход второго триггера соединен со стробирующим входом
g первого формирователя и с вторым входом второй двухвходовой схемы И-НЕ, прямой выход четвертого триггера соединен с первым входом третьей двухвходовой схемы И-НЕ, а второй вход этой схемы И-НЕ с выходом второго формирователя импуль0 сов, прямой выход пятого триггера соединен с D-входом второго триггера, прямой и инверсный выходы шестого триггера соединены соответственно с вторым входом трехвходовой схемы И-НЕ и с управляющими входами измерителя периода и первого
5 регистра, а инверсный выход седьмого триггера соединен с управляющими входами первого и второго основных счетчиков и с 5-входами четвертого и шестого триггеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство управления подачей топлива в двигатель внутреннего сгорания | 1979 |
|
SU859665A1 |
| Устройство для построения сейсмических разрезов | 1985 |
|
SU1291917A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРЕЦИЗИОННЫЙ ЧАСТОМЕР ПРОМЫШЛЕННОГО НАПРЯЖЕНИЯ | 2006 |
|
RU2333501C1 |
| ИОНИЗАЦИОННЫЙ ФИЛЬТР ДЛЯ ОЧИСТКИ ВОЗДУХА | 1992 |
|
RU2009717C1 |
| Корректор напряжения | 1982 |
|
SU1091297A1 |
| Измерительный преобразователь активной и реактивной составляющих синусоидального тока | 1990 |
|
SU1748079A1 |
| АДАПТИВНЫЙ ЦИФРОВОЙ ЧАСТОТНЫЙ ДИСКРИМИНАТОР | 2000 |
|
RU2166773C1 |
| Цифровой измеритель длительности периода | 1988 |
|
SU1582176A1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГИСТРАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1991 |
|
RU2037190C1 |
Изобретение относится к измерительной технике, а именно к средствам контроля геометрических параметров сопряженных зубчатых колес, и может быть использовано для определения кинематической погрешности зубчатой передачи при ее вращении со скоростями, соответствующими рабочему диапазону угловых скоростей вращения входного и выходного валов. Цель изобретения - повышение точности при измерении кинематической погрешности передач с большими взаимно простыми числами зубьев сопряженных колес. Это достигается формированием от общего генератора 3 двух опорных частот, пропорциональных этим числам в передаточном отношении, заполнением интервала между импульсами каждого из датчиков 1 и 2 соответствующей опорной частотой, вычислением разности накопленных за каждый интервал чисел импульсов в сумматоре 14 и преобразованием полученной разности в величину, пропорциональную погрешности, выраженной в единицах измерения угла, в перемножителе 15 путем деления разности на число импульсов, накопленных в измерителе 16 периода между двумя импульсами первого датчика 1, и умножения результата на масштабный коэффициент. Устройство работоспособно на переходных режимах и в диапазоне угловых скоростей от 1 об/мин до 400 об/с. Цель изобретения достигается за счет увеличения числа импульсов, накапливаемых в счетчиках 6 и 7, при заполнении их опорными частотами. Абсолютная погрешность определяется с точностью до единиц или долей угловых секунд на вращающейся с рабочей скоростью передаче. 1 ил.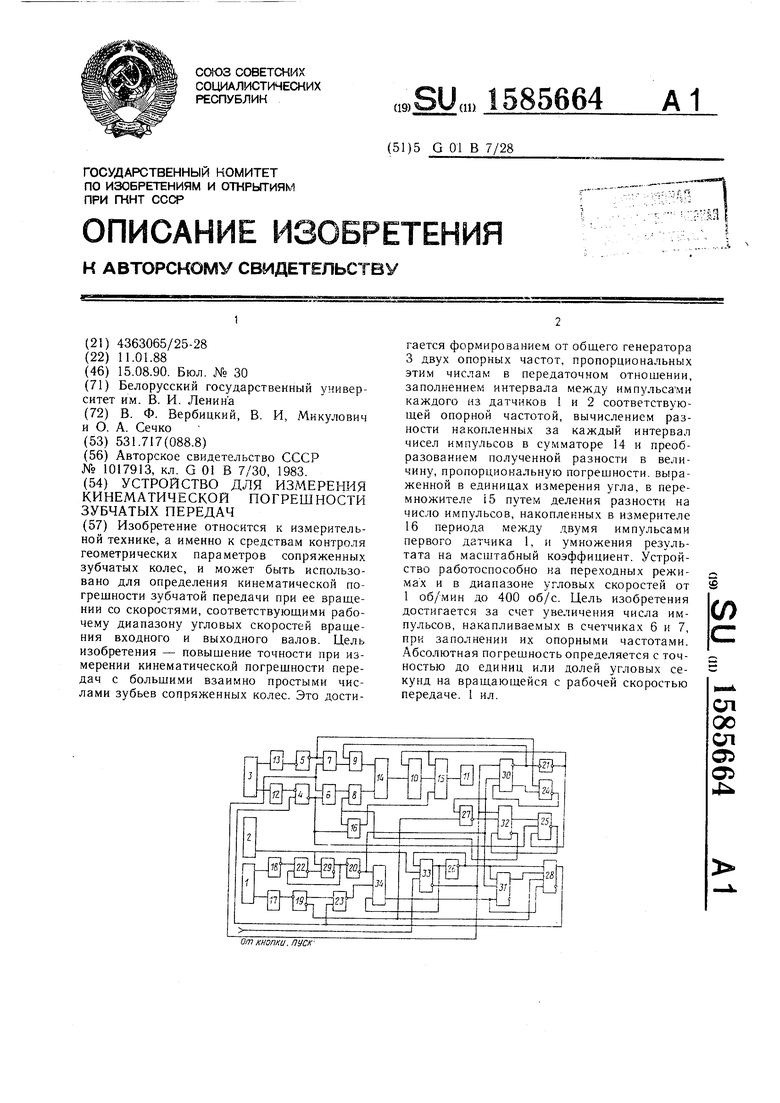
| Цифровое устройство для измерения кинематической погрешности зубчатых передач | 1981 |
|
SU1017913A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
