Изобретение относится к измерительной технике, в частности к контрольно-измерительным устройствам для измерения параметров зубчатых колес.
Известно устройство для контроля окружного шага зубчатых колес, авт. свид. СССР №1742619 А1, опубл. 23.06.1992, авторы Е.В.Скрибанов и др., содержащее осветитель с проектирующей щелью, кольцевой лазер, двухплощадочный фотоприемник, отметчик одного оборота, электронный блок обработки информации, регистрирующее устройство.
Недостатками известного устройства являются следующие: данное устройство обеспечивает однопрофильный контроль, причем контролирует только два параметра. В настоящее время эвольвентное зацепление контролируется по 26 параметрам на различных приборах и на различных измерительных позициях.
Целью изобретения является создание принципиально нового метода формирования эвольвентного зацепления и создание на его основе унифицированной системы для одновременного контроля практически всех основных параметров эвольвентного зацепления на одной измерительной позиции. Кроме того, дополнительно контролировать следующие параметры: получать топограмму профиля поверхности каждого зуба колеса, пятно контакта без наличия эталонного колеса, а также отклонение положения профиля эвольвенты каждого зуба относительно друг друга.
Выполнение перечисленных выше требований невозможно обеспечить на существующих устройствах, построенных на косвенном методе обкатки.
В основу предлагаемого устройства положен принципиально новый метод формирования эвольвентного зацепления - метод полярных координат, реализующий исходную расчетную зависимость эвольвенты - зависимость радиус-вектора и угла поворота для каждой точки эвольвенты.
Техническим результатом изобретения является реализация формирования эвольвентного зацепления на основе использования метода полярных координат и создание устройства для комплексного бесконтактного контроля зубчатых колес, что обеспечивает одновременный контроль практически всех основных параметров эвольвенты на одной измерительной позиции, решив проблему единства измерений и повышения качества изготовления зубчатых колес.
Для достижения указанного технического результата, устройство для комплексного бесконтактного контроля зубчатых колес на основе метода полярных координат содержит контролируемое зубчатое колесо (7), закрепленные на одной оси кольцевой лазер (2), отметчик одного оборота (3) и привод (4), образующие шпиндельный узел, оптикоэлектронный датчик (7), включающий осветитель (5) и двухплощадочный оптикоэлектронный преобразователь (6), усилители (16) и (11), компаратор (18), привод перемещения по линии зацепления (13), датчик перемещения по линии зацепления (14), привод перемещения по ширине зуба (10), датчик перемещения по ширине зуба (9), привод перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (11), датчик перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (12), регулируемый источник напряжения (8) осветителя (5), блок определения крутизны сигнала (15), блок параметров зуба (19), блок длины полезного профиля зуба (20), блок определения полюса зацепления (21), блок управления приводом перемещения по линии зацепления (22), блок управления приводом перемещения по ширине зуба (23), блок регистрации параметров зацепления (25) и блок вычисления параметров зацепления (26), при этом выходы двухплощадочного оптикоэлектронного преобразователя (6) соединены с входами усилителей (16) и (17), причем выход усилителя (16) соединен с первым входом компаратора (18), а выход усилителя (11) соединен со вторым входом компаратора (18) и входом блока определения крутизны сигнала (15), выход которого соединен с входом регулируемого источника напряжения (8), выход которого соединен с входом осветителя (5), выход компаратора (18) соединен со вторым входом блока длины полезного профиля зуба (20), со вторым входом блока управления приводом перемещения по ширине зуба (23) и с первым входом блока регистрации параметров зацепления (25), первый выход блока параметров зуба (19) соединен с входом привода (4), второй выход этого блока соединен с первым входом блока определения полюса зацепления (21), а третий выход - с первым входом блока длины полезного профиля зуба (20), первый и второй выходы которого соединены соответственно с третьим входом блока управления приводом по линии зацепления (22) и с пятым входом блока управления приводом перемещения по ширине зуба (23), выход датчика перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (12) соединен со вторым входом блока определения полюса зацепления (21), а выход датчика перемещения по ширине зуба (9) соединены с третьим входом блока определения полюса зацепления (21) и четвертым входом блока управления приводом перемещения по ширине зуба (23), выход датчика перемещения по линии зацепления (14) соединен с четвертым входом блока определения полюса зацепления (27) и первым входом блока определения полюса зацепления (22), выход ноль метки отметчика одного оборота (3) соединен со вторым входом блока управления приводом по линии зацепления (22), с третьим входом блока управления приводом перемещения по ширине зуба (23) и с третьим входом блока регистрации параметров зацепления (25), выход кольцевого лазера (2) соединен с четвертым входом блока регистрации параметров зацепления (25), при этом первый, второй и третий выходы блока определения полюса зацепления (21) соединены соответственно с входами приводов перемещений по линии зацепления (13), по ширине зуба (10) и перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (11), первый, второй и третий выходы блока управления приводом по линии зацепления (22) соединены соответственно с входами привода перемещения по линии зацепления (13), с первым входом блока управления приводом перемещения по ширине зуба (23) и первым входом блока синхронизации (24), первый и второй выходы блока управления приводом перемещения по ширине зуба (23) соединены соответственно с входом привода перемещения по ширине зуба (70) и вторым входом блока синхронизации (24), выход которого соединен со вторым входом блока регистрации параметров зацепления (25), а выход этого блока соединен с входом блока вычисления параметров зацепления (26).
На рис.1 представлена блок-схема устройства для комплексного бесконтактного контроля зубчатых колес на основе метода полярных координат.
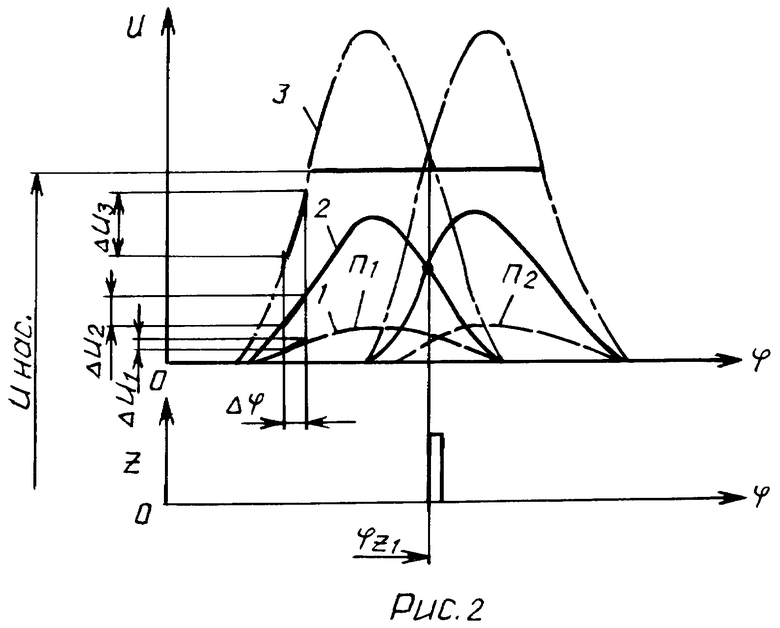
На рис.2 показана зависимость сигналов на выходе двухплощадочного оптико-электронного преобразователя для различных отражательных свойств поверхности зуба.
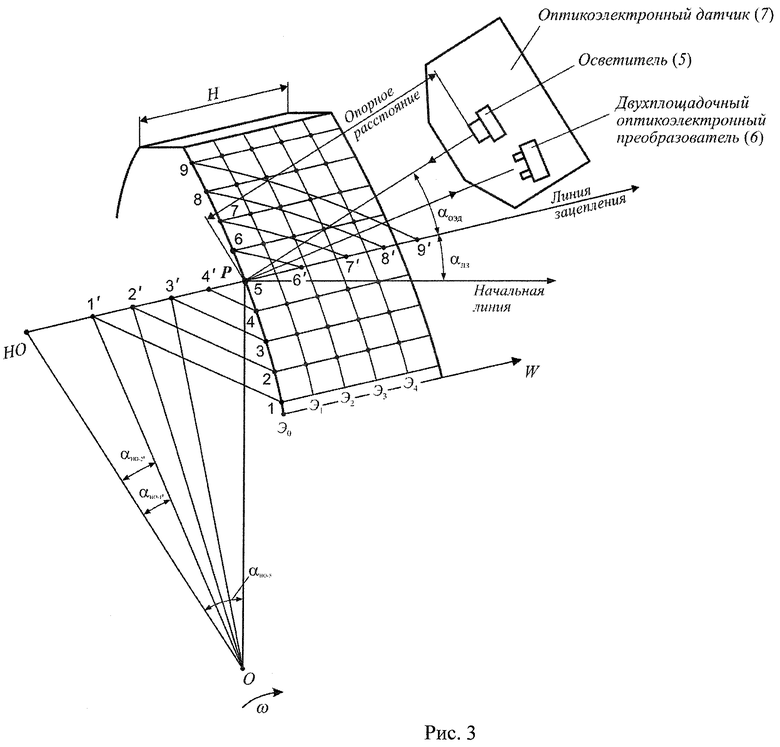
На рис.3 показана зависимость преобразования эвольвенты в линию зацепления.
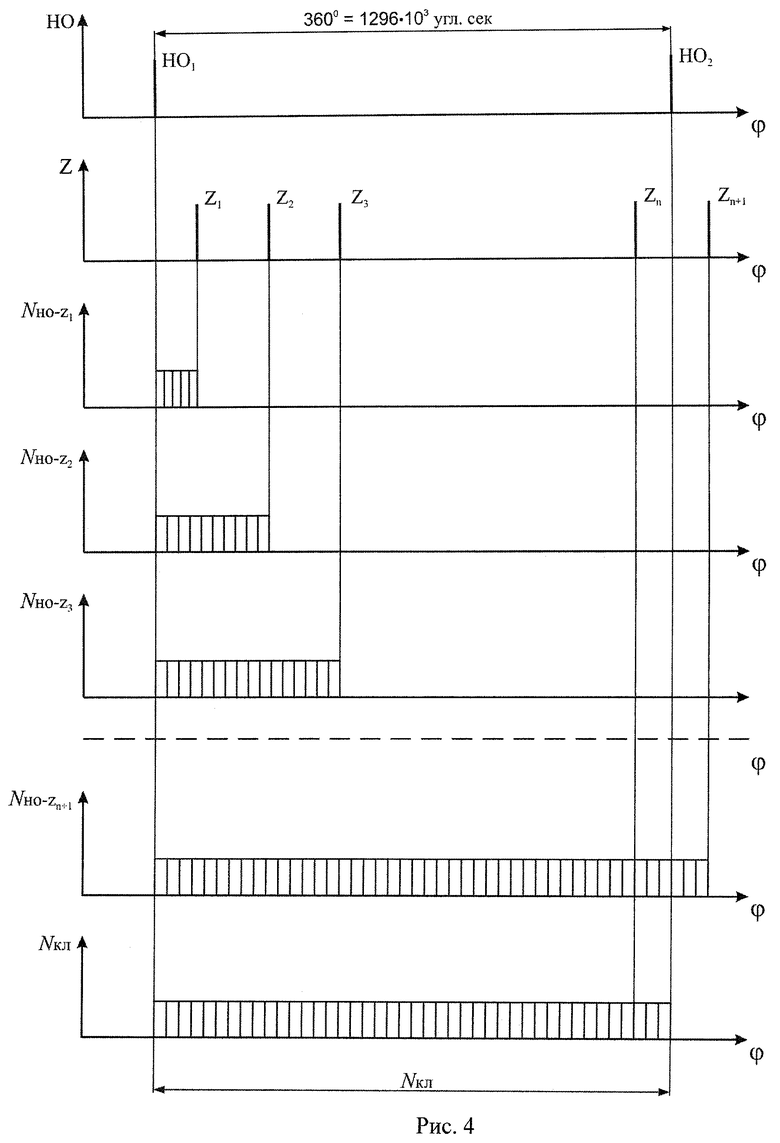
На рис.4 показана временная диаграмма работы устройства для определения углового положения точек эвольвенты.
Устройство для комплексного бесконтактного контроля зубчатых колес на основе метода полярных координат (рис.1) содержит контролируемое зубчатое колесо 7, закрепленные на одной оси кольцевой лазер 2, отметчик одного оборота 3 и привод 4, образующие шпиндельный узел, оптикоэлектронный датчик 7, включающий осветитель 5, например твердотельный лазер, блок регулируемого напряжения 8 и двухплощадочный оптикоэлектронный преобразователь 6, приводы и датчики перемещений оптикоэлектронного датчика 7: привод 10 с датчиком 9 по ширине зуба, привод 11 с датчиком 72 перпендикулярно начальной линии зуба и оси вращения зубчатого колеса, привод 13 с датчиком 14 по линии зацепления, и электронный блок регистрации и обработки информации.
В состав электронного блока регистрации и обработки информации входят регулируемый источник напряжения 8 осветителя 5, усилители 16, двухплощадочного оптикоэлектронного преобразователя 6, компаратор 18, блок определения крутизны сигнала 15, блок параметров зуб 19, блок длины полезного профиля зуба 20, блок определения полюса зацепления 21, блок управления приводом перемещения по линии зацепления 22, блок управления приводом перемещения по ширине зуба 23, блок синхронизации 24, блок регистрации параметров зацепления 25, блок вычисления параметров зацепления 26.
Выходы двухплощадочного оптикоэлектронного преобразователя 6 соединены с входами усилителей 16 и 17, при этом выход усилителя 16 соединен с первым входом компаратора 18, а выход усилителя 17 соединен со вторым входом компаратора 18 и входом блока определения крутизны сигнала 15, выход которого соединен с входом регулируемого источника напряжения 8, выход которого соединен с входом осветителя 5, выход компаратора 18 соединен со вторым входом блока длины полезного профиля зуба 20, со вторым входом блока управления приводом перемещения по ширине зуба 23 и с первым входом блока регистрации параметров зацепления 25, первый выход блока параметров зуба 19 соединен с входом привода 4, второй выход этого блока соединен с первым входом блока определения полюса зацепления 21, а третий выход - с первым входом блока длины полезного профиля зуба 20, первый и второй выходы которого соединены соответственно с третьим входом блока управления приводом по линии зацепления 22 и с пятым входом блока управления приводом перемещения по ширине зуба 23, выход датчика 12 перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса соединен со вторым входом блока определения полюса зацепления 21, а выход датчика 9 перемещения по ширине зуба соединены и третьим входом блока определения полюса зацепления 21, и четвертым входом блока управления приводом перемещения по ширине зуба 23, выход датчика 14 перемещения по линии зацепления соединен с четвертым входом блока определения полюса зацепления 21 и первым входом блока определения полюса зацепления 22, выход ноль метки отметчика одного оборота 3 соединен со вторым входом блока управления приводом по линии зацепления 22, с третьим входом блока управления приводом перемещения по ширине зуба 23 и с третьим входом блока регистрации параметров зацепления 25, выход кольцевого лазера 2 соединен с четвертым входом блока регистрации параметров зацепления 25, при этом первый, второй и третий выходы блока определения полюса зацепления 21 соединены соответственно с входами приводов перемещений по линии зацепления 13, по ширине зуба 10 и перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса 11 первый, второй и третий выходы блока управления приводом по линии зацепления 22 соединены соответственно с входами привода перемещения по линии зацепления 13, с первым входом блока управления приводом перемещения по ширине зуба 23 и первым входом блока синхронизации 24, первый и второй выходы блока управления приводом перемещения по ширине зуба 23 соединены соответственно с входом привода перемещения по ширине зуба 10 и вторым входом блока синхронизации 24, выход которого соединен со вторым входом блока регистрации параметров зацепления 25, а выход этого блока соединен с входом блока вычисления параметров зацепления 26.
На рис.1 обозначены:
P - полюс зацепления для одной стороны эвольвенты зуба,
P1 - полюс зацепления для другой стороны эвольвенты зуба
Устройство работает следующим образом.
От блока параметров зуба 19 на вход привода 4 подается команда на вращение шпиндельного узла в составе контролируемого зубчатого колеса 1, кольцевого лазера 2, отметчика одного оборота 3 с произвольной по величине угловой скоростью ω, но стабильной в пределах оборота.
Сфокусированный световой штрих от осветителя 5, например, твердотельного лазера, в точке поверхности зуба, которая является полюсом зацепления Р, который, отражаясь от зуба, попадает в виде диффузно отраженного светового потока на светочувствительную поверхность двухплощадочного оптикоэлектронного преобразователя 6 (рис.1 и 3), причем расстояние от осветителя 5 до полюса зацепления Р будет определяться величиной опорного расстояния, так как только в этом случае диффузно отраженный световой поток попадает на светочувствительную поверхность двухплощадочного оптикоэлектронного преобразователя 6. Сигнал от этого преобразователя 6 поступает на усилители 16 и 17. С выхода усилителя 16 сигнал поступает на первый вход компаратора 18. С выхода усилителя 11 сигнал поступает на второй вход компаратора 18 и на вход блока определения крутизны сигнала 15, с выхода которого сигнал поступает на регулируемый источник напряжения 8 осветителя 5. Таким образом, при повороте зубчатого колеса 1 на один полный оборот на выходе двухплощадочного оптикоэлектронного преобразователя 6 будет последовательность сигналов, число которых будет определяться числом зубьев Z колеса, а их положение будет определять полюс зацепления соответствующего зуба. При этом для сканирования всей длины полезного профиля зуба оптикоэлектронный датчик 7 повернут относительно начальной линии, ось X, на угол линии зацепления αлз, а также на дополнительный угол αоэд≤30°, что обеспечивает сканирование всей длины профиля эвольвенты зуба (рис.1).
Формирование образа профиля эвольвенты с использованием полярной системы координат происходит следующим образом.
Информация от блока параметров 19, содержащего данные о числе зубьев Z и модуле зацепления m, а также от датчиков перемещений 9 по ширине зуба, датчика 12 оптикоэлектронного датчика 7 и по линии зацепления 14, поступает в блок определения полюса зацепления 21, по данным с которого посредством привода по линии зацепления 13 устанавливают световой штрих опорного расстояния осветителя 5 в полюс зацепления Р, при этом датчики перемещений 9, 12 и 14 фиксируют фактическое положение оптикоэлектронного датчика 7 в системе координат. Информация от блока параметров 19 и компаратора 18 поступает в блок длины полезного профиля 20, в котором определяется длина полезного профиля эвольвенты для данного колеса. Сканирование профиля эвольвенты в каждом сечении обеспечивается дискретно, при этом величина дискрета, время включения и выключения привода перемещения по линии зацепления 13 определяются блоком управления приводом перемещения по линии зацепления 22, ноль метки отметчика одного оборота 3, датчика перемещения по линии зацепления 14.
Определение параметров эвольвенты в различных сечениях по ширине зуба осуществляется перемещением оптикоэлектронного датчика 7 приводом перемещения по ширине зуба 10, используя информацию от блока управления приводом перемещения по ширине зуба 23, в который на пятый, четвертый, третий, второй и первый входы блока длины полезного профиля зуба 20 поступают данные от датчика перемещения по ширине зуба Р, ноль метки отметчика одного оборота 3, компаратора 18 и блока управления приводом перемещения по линии зацепления 22.
Для регистрации информации о геометрических параметрах эвольвентного зацепления для каждой точки профиля поверхности зуба производится синхронизация данных об угле поворота, величине радиус-вектора, координатах эвольвенты по ширине зуба, координатах точек эвольвенты по линии зацепления, номере зуба, для чего в блок синхронизации 24 поступают данные со второго выхода блока 22 и второго выхода блока 23. В блоке регистрации 25 происходит регистрация параметров зацепления с последующим их преобразованием в блоке вычисления параметров 26.
На рис.3 показана схема преобразования эвольвенты в линию зацепления, где
Э1…Э4 - сечения эвольвенты по ширине зуба;
H - ширина зуба;
αлз - угол зацепления между осью X и линией зацепления
αоэд - угол между линией зацепления и направлением луча осветителя;
1…9 - точки эвольвенты Э0;
1 и 9 - точки начала и конца длины полезного профиля длины эвольвенты Э0 на линии зацепления
5 - точка полюса Р для сечения эвольвенты Э0;
1'…9' - точки на линии зацепления, соответствующие точкам 1…9 преобразованной эвольвенты Э0;
αно-1' - угол между ноль меткой и точкой Г на линии зацепления. Перемещая оптикоэлектронный датчик 7 по ширине зуба в положение эвольвенты Э1 Э2 и т.д., определяются координаты всех точек для всех сечений эвольвенты поверхности всех зубьев колеса 7.
Координата точки 5 будет определяться величиной радиуса-вектора, равной  , где m - модуль зацепления, Z - число зубьев, а также углом поворота αно-5.
, где m - модуль зацепления, Z - число зубьев, а также углом поворота αно-5.
При вращении колеса за один полный поворот будут определяться координаты точек для всех зубьев колеса. На рис.4 приведена временная диаграмма определения углового положения для всех зубьев колеса в одном сечении для точки 5 эвольвенты Э0.
Для определения геометрических параметров точки 6, необходимо отвести оптикоэлектронный датчик 7 по линии зацепления на расстояние ΔL5'-6' (рис.3), т.е. на выходе оптикоэлектронного датчика 7 будет последовательность импульсов от точки 6; в этом случае приведенная диаграмма на рис.4 будет относиться и к точке 6, аналогично изложенному это будет справедливым и для всех точек эвольвенты Э0 от 1 до 9, при перемещении оптикоэлектронного датчика 7 по линии зацепления. В этом случае координаты точек эвольвенты будут определяться измеренными параметрами:
точка 1: R1=R5-ΔL1'-5'; бно-1';
точка 2: R2=R5-ΔL2'-5'; бно-2';
точка 3: R3=R5-ΔL3'-5'; бно-3'
точка 4: R4=R5-ΔL4'-5'; бно-4'
точка 5: R5=R5; бно-5';
точка 6: R6=R5-ΔL6'-5'; бно-6';
точка 7: R7=R5-ΔL7'-5'; бно-7'
точка 8: R8=R5-ΔL8'-5'; бно-8';
точка 9: R9=R5-ΔL9'-5'; бно-9';
Число импульсов, характеризующих величину окружных шагов точки 5 полюса зацепления Р эвольвенты Э0, будет определяться выражениями:
где  ,
,  ,…,
,…,  - число импульсов от кольцевого лазера между ноль меткой и первым зубом, ноль меткой и вторым зубом и т.д.
- число импульсов от кольцевого лазера между ноль меткой и первым зубом, ноль меткой и вторым зубом и т.д.
При перемещении оптикоэлектронного датчика 7 по линии зацепления на величину ΔL5-6', в точку 6', величина радиуса-вектора будет

Число импульсов, характеризующих величины окружных шагов эвольвенты Э0, будет определяться выражениями, приведенными выше.
Последовательно перемещая оптикоэлектронный датчик 7 по линии зацепления в точки эвольвенты Э0 и фиксируя радиус-вектор и угол поворота в каждой точке, получим значения величин окружных шагов в импульсах для всех сечений длины полезного профиля, точки 1'…9'.
Переместив оптикоэлектронный датчик 7 по ширине зуба на сечение эвольвенты Э1, аналогично рассмотренному выше определяем величины окружных шагов для всех сечений по длине полезного профиля эвольвенты Э1, а также для всех других сечений эвольвенты по ширине зуба. Учитывая физические и конструктивные особенности работы кольцевого лазера, особенно на разных значениях угловой скорости вращения шпиндельного узла, для каждой точки профиля поверхности зуба фиксируется фактическое число импульсов от кольцевого лазера за один полный оборот.
Номинальное значение числа импульсов, характеризующее номинальное значение углового шага для каждого оборота будет определяться выражением
Дискретность одного импульса кольцевого лазера:
 .
.
Данное устройство обеспечивает также двухпрофильный контроль параметров колеса. В этом случае блок определения полюса зацепления 21 выдает команду приводу перемещения по ширине зуба 10, приводу перемещения оптикоэлектронного датчика перпендикулярно начальной линии зуба и оси вращения зубчатого колеса 11 и приводу перемещения по линии зацепления 13 в точку полюса с координатами:
радиус-вектор точки  ;
;
угол поворота оптикоэлектронного датчика 7 равен углу зацепления - αлз, при этом αоэд≤-30°.
Определение параметров для противоположной стороны поверхности каждого зуба будет осуществляться аналогично вышеизложенному перемещением оптикоэлектронного датчика 7 по линии зацепления на дискрету, равную дискрете перемещения этого датчика при измерении параметров эвольвенты противоположной стороны поверхности зуба, и будет дополнительно определена толщина каждого зуба в сечении по профилю зуба.
Для контроля косозубых колес, привод перемещения по ширине зуба 10 и датчик перемещения по ширине зуба 9 обеспечивают перемещение и регистрацию величины перемещения оптикоэлектронного датчика 7 под углом наклона направления зуба такого колеса.
Поворот оптикоэлектронного датчика 7 относительно начальной линии, ось X, на угол линии зацепления αлз, а также на дополнительный угол αоэд≤30°, обеспечивая сканирование всей длины профиля эвольвенты зуба, приводит к тому, что амплитуда сигнала на выходе двухплощадочного оптикоэлектронного преобразователя 6 уменьшается в несколько раз. Поэтому для обеспечения значимого сигнала по амплитуде на выходе двухплощадочного оптикоэлектронного преобразователя 6 при различных отражательных свойствах поверхности зуба на осветитель подается соответствующее напряжение от регулируемого источника напряжения 8 по сигналу, поступающему от блока формирования крутизны сигнала 75. На рис.2 показана зависимость на выходе оптикоэлектронного преобразователя 6 для различных отражательных свойств поверхности зуба. На этом рисунке показаны:
кривая 1 - изменение минимальной амплитуды сигнала;
кривая 2 - изменение нормальной амплитуды сигнала;
кривая 3 - изменение максимальной амплитуды сигнала;
П1 - сигнал на выходе первой светочувствительной площадки двухплощадочного оптикоэлектронного преобразователя;
П2 - сигнал на выходе второй светочувствительной площадки двухплощадочного оптикоэлектронного преобразователя;
Z1 - сигнал на выходе компаратора 18, характеризующий геометрическое положение соответствующего зуба;
Uнас - величина напряжения насыщения усилителей 16 и 17;
ΔU1, ΔU2 и ΔU3 - приращение напряжения на выходе первой светочувствительной площадки П1;
Δφ - угол поворота колеса.
Как видно из характера изменения амплитуд сигналов, отображаемых кривыми 1, 2 и 3, сигнал на выходе компаратора 18 будет значимым только для кривой 2; для кривой 1, ввиду малой амплитуды сигнала, и для кривой 3, ввиду насыщения, нельзя определить точку пересечения сигналов на выходе светочувствительных площадок П1 и П2. Таким образом блок формирования крутизны сигнала 15 на переднем фронте импульса от первой площадки П1 формирует зависимость крутизны нарастания сигнала  и подает на вход регулируемого источника напряжения 8. В зависимости от его значения увеличивается или уменьшается напряжение, подаваемое на осветитель 5, причем данное преобразование напряжения происходит до появления экстремума на выходе светочувствительной площадки П1. Такое решение позволяет получать не только объективную информацию о геометрическом положении светового штриха и соответственно контролируемой точки эвольвенты, но и повысить точность определения геометрических параметров, радиус-вектора и угла поворота для конкретной точки эвольвенты.
и подает на вход регулируемого источника напряжения 8. В зависимости от его значения увеличивается или уменьшается напряжение, подаваемое на осветитель 5, причем данное преобразование напряжения происходит до появления экстремума на выходе светочувствительной площадки П1. Такое решение позволяет получать не только объективную информацию о геометрическом положении светового штриха и соответственно контролируемой точки эвольвенты, но и повысить точность определения геометрических параметров, радиус-вектора и угла поворота для конкретной точки эвольвенты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля окружного шага зубчатых колес | 1989 |
|
SU1742619A1 |
| Устройство для контроля окружного шага и накопленной погрешности зубчатых колес | 1989 |
|
SU1719880A1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ СТАНКОВ С ЧПУ | 2010 |
|
RU2438156C1 |
| Способ бесконтактного измерения окружного шага зубчатых колес | 1972 |
|
SU533817A1 |
| Автоматическое устройство коррекции окружного шага зубчатых колес | 1972 |
|
SU442024A1 |
| КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ИЗДЕЛИЙ И УПРАВЛЯЮЩИХ ПРОГРАММ ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗДЕЛИЯ НА СТАНКАХ С ЧПУ НА ОСНОВЕ 3D МОДЕЛЕЙ | 2016 |
|
RU2640383C1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| Способ обработки зубчатых колес | 1988 |
|
SU1696191A1 |
| Способ обработки зубчатых колес | 1988 |
|
SU1696192A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС | 1999 |
|
RU2165339C2 |
Изобретение относится к измерительной технике, в частности для контроля параметров зубчатых колес. Устройство для комплексного бесконтактного контроля зубчатых колес на основе метода полярных координат содержит контролируемое зубчатое колесо, лазерный кольцевой генератор, отметчик одного оборота, привод, жестко закрепленные на одной оси и образующие шпиндельный узел, оптикоэлектронный датчик, включающий твердотельный лазер, двухплощадочный оптикоэлектронный преобразователь, усилители, компаратор, отличающееся тем, что оно снабжено приводами и датчиками перемещения по линии зацепления, по ширине зуба, по оси Y, регулируемым источником напряжения, блоками определения крутизны сигнала и параметров, блоком длины полезного профиля, блоком определения полюса зацепления, блоками управления приводом по ширине зуба и приводом по линии зацепления, блоками синхронизации, регистрации и вычисления параметров. Для обеспечения двухпрофильного контроля и контроля толщины зуба, оптикоэлектронный датчик перемещается в точку полюса зацепления профиля эвольвенты другой стороны поверхности зуба, причем точка полюса расположена на противоположной стороне колеса. Для обеспечения контроля косозубых колес, привод по ширине зуба перемещает датчик под углом наклона зуба контролируемого колеса. Решение позволяет одновременно контролировать основные параметры эвольвенты на одной измерительной позиции. 1 з.п. ф-лы, 4 ил.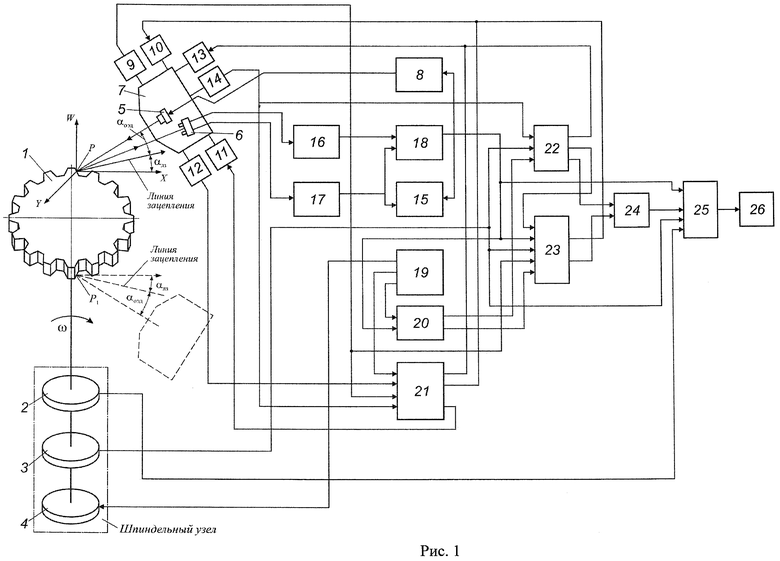
1. Устройство для комплексного контроля зубчатых колес на основе метода полярных координат содержит контролируемое зубчатое колесо (1), закрепленные на одной оси кольцевой лазер (2), отметчик одного оборота (3) и привод (4), образующие шпиндельный узел, оптикоэлектронный датчик (7), включающий осветитель (5) и двухплощадочный оптикоэлектронный преобразователь (6), усилители (16) и (17) двухплощадочного оптикоэлектронного преобразователя (6), компаратор (18), отличающееся тем, что снабжено приводом перемещения по линии зацепления (13), датчиком перемещения по линии зацепления (14), приводом перемещения по ширине зуба (10), датчиком перемещения по ширине зуба (9), приводом перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (11), датчиком перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (12), регулируемым источником напряжения (8) осветителя (5), блоком определения крутизны сигнала (15), блоком параметров зуба (19), блоком длины полезного профиля зуба (20), блоком определения полюса зацепления (21), блоком управления приводом перемещения по линии зацепления (22), блоком управления приводом перемещения по ширине зуба (23), блоком синхронизации параметров зуба (24), блоком регистрации параметров зацепления (25) и блоком вычисления параметров зацепления (26), при этом выходы двухплощадочного оптикоэлектронного преобразователя (6) соединены с входами усилителей (16) и (17), причем выход усилителя (16) соединен с первым входом компаратора (18), а выход усилителя (17) соединен со вторым входом компаратора (18) и входом блока определения крутизны сигнала (15), выход которого соединен с входом регулируемого источника напряжения (8), выход которого соединен с входом осветителя (5), выход компаратора (18) соединен со вторым входом блока длины полезного профиля зуба (20), со вторым входом блока управления приводом перемещения по ширине зуба (23) и с первым входом блока регистрации параметров зацепления (25), первый выход блока параметров зуба (19) соединен с входом привода (4), второй выход этого блока соединен с первым входом блока определения полюса зацепления (21), а третий выход - с первым входом блока длины полезного профиля зуба (20), первый и второй выходы которого соединены соответственно с третьим входом блока управления приводом по линии зацепления (22) и с пятым входом блока управления приводом перемещения по ширине зуба (23), выход датчика перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (12) соединен со вторым входом блока определения полюса зацепления (21), а выход датчика перемещения по ширине зуба (9) соединен с третьим входом блока определения полюса зацепления (21) и четвертым входом блока управления приводом перемещения по ширине зуба (23), выход датчика перемещения по линии зацепления (14) соединен с четвертым входом блока определения полюса зацепления (21) и первым входом блока управления приводом перемещения по линии зацепления (22), выход ноль метки отметчика одного оборота (3) соединен со вторым входом блока управления приводом по линии зацепления (22), с третьим входом блока управления приводом перемещения по ширине зуба (23) и с третьим входом блока регистрации параметров зацепления (25), выход кольцевого лазера (2) соединен с четвертым входом блока регистрации параметров зацепления (25), при этом первый, второй и третий выходы блока определения полюса зацепления (21) соединены соответственно с входами приводов перемещений по линии зацепления (13), по ширине зуба (10) и перемещения перпендикулярно начальной линии зуба и оси вращения зубчатого колеса (11), первый, второй и третий выходы блока управления приводом по линии зацепления (22) соединены соответственно с входами привода перемещения по линии зацепления (13), с первым входом блока управления приводом перемещения по ширине зуба (23) и первым входом блока синхронизации (24), первый и второй выходы блока управления приводом перемещения по ширине зуба (23) соединены соответственно с входом привода перемещения по ширине зуба (10) и вторым входом блока синхронизации (24), выход которого соединен со вторым входом блока регистрации параметров зацепления (25), а выход этого блока соединен с входом блока вычисления параметров зацепления (26).
2. Устройство по п.1, отличающееся тем, что оптикоэлектронный датчик (7) располагается под углом наклона зуба контролируемого колеса.
| Устройство для контроля окружного шага и накопленной погрешности зубчатых колес | 1989 |
|
SU1719880A1 |
| Автоматическое устройство коррекции окружного шага зубчатых колес | 1972 |
|
SU442024A1 |
| Прибор для измерения накопленной погрешности шага по зубчатому колесу | 1974 |
|
SU551911A1 |
| Устройство для контроля накопленной погрешности окружного шага зубчатых колес | 1973 |
|
SU462977A2 |
| Устройство для контроля окружного шага зубчатых колес | 1989 |
|
SU1742619A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| Способ определения кинематической погрешности зубчатых колес | 1984 |
|
SU1220425A1 |
| Способ бесконтактного измерения окружного шага зубчатых колес | 1972 |
|
SU533817A1 |
| JP 7071942 A, 17.03.1995 | |||
| KR 20090019930 A, 26.02.2009 | |||
| DE 3225985 A1, 12.01.1984. | |||

