Изобретение относится к сельскохозяйственному машиностроению, а именно к зерноуборочным комбайнам.
Известен способ автоматического управления технологическим процессом зерноуборочного комбайна, включающий измерение, определение и сравнение средних значений количества подаваемой в комбайн хлебной массы, потерь зерна и изменение поступательной скорости комбайна по полученным результатам с целью оптимизации процесса его работы при допустимом уровне потерь в условиях изменяющихся характеристик убираемой культуры.
К недостаткам известного способа относится то, что автоматическая оптимизация техпроцесса комбайна производится без учета полной загрузки двигателя комбайна от сельхозкультуры и от поля.
Кроме того, алгоритмы управления техпроцессом не изменяются в процессе работы комбайна. Отсутствует стратегия управления процессом работы комбайна на основе комплексного параметра качества.
Цель изобретения - повышение качества обмолота и надежности технологического процесса зерноуборочного комбайна с максимально возможной пропускной способностью и оптимальной загрузкой двигателя при допустимом уровне потерь в условиях изменяющихся характеристик убираемой культуры и поля.
Указанная цель достигается тем, что измеряют на определенном отрезке времени средние значения подачи сельхозкультуры qi, интенсивности потерь зерна yi, угловой скорости вала двигателя комбайна при обмолоте сельхозкультуры ад и на холостом ходу с включенными рабочими органами (Оо, вычисляют относительные величины
У|
(00 Ч 9i
умножают величину fjr на коэффициент R настройки комбайна на оптимальный режим, равный при первом цикле работы 153,3, определяют параметр работы ком- байнд по формуле
KM-lfurRfjl,,
а если параметр K(v) равен нулю или больше нуля и средние значения ад и yi превышают допустимые значения ш и у, то скорость перемещения комбайна v уменьшают, а если параметр K(v) равен нулю и средние значения ад и у) равны допустимым значениям о и у, то скорость перемещения комбайна не меняют, а если параметр K(v) равен или больше нуля и средние значения ад и yi не равны и не превышают допустимые значения са и |у, то скорость перемещения комбайна увеличивают, при этом проводят повторный замер параметров ад, qi, yi и по ним вычисляют новое значение параметра
работы комбайна K(v) и в момент, когда параметр K(v) имеет минимальное значение, определяют новый коэффициент настройки комбайна на оптимальный режим по формулам
R - при K(v) 0, ад У ,у i
15 R - грприК(у)0,,У1
. 91
yi
Шо
, при K(v) 0, ад со,
5
0
5
5
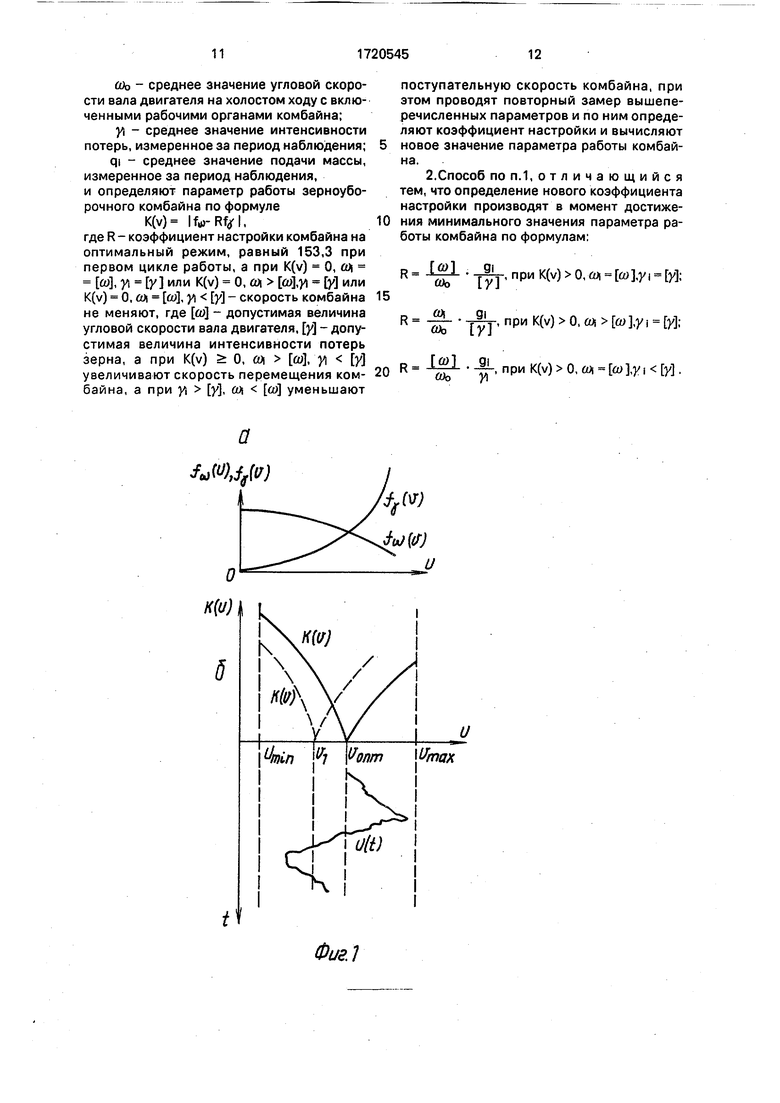
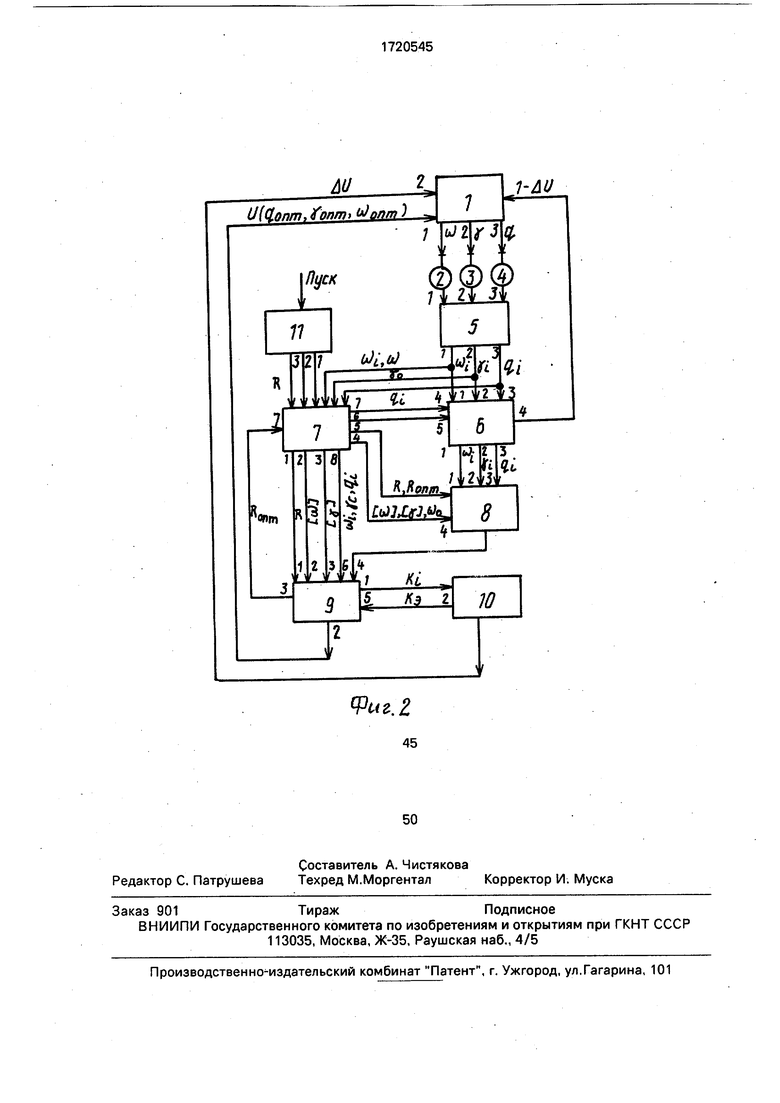
0 На фиг.1 представлены графики, поясняющие предлагаемый способ управления; на фиг.2 - блок-схема системы автоматического управления техпроцессом зерноуборочного комбайна на основе предлагаемого
5 способа.
При работе с увеличением скорости v перемещения комбайна по полю увеличивается нагрузка на рабочие органы и двигаотель
Нагрузка на двигатель складывается из двух составляющих: сил сопротивления на выполнение техпроцесса и на самопередвижение комбайна, так как угловая скорость зависит от нагрузки, то она меняется с изменением указанных двух составляющих сил сопротивления комбайна.
С ростом нагрузки уменьшается угловая скорость ад вала двигателя. Отношение fц/величины угловой скорости вала двигателя под нагрузкой ад к величине угловой скорости вала двигателя при холостом ходе молотилки Шо также уменьшается с увеличением нагрузки и является функцией скорости комбайна v (кривая fy (v), фиг.1а). С увеличением нагрузки на рабочие органы потери зерна возрастают. Интенсивность потерь зерна у есть изменение массы зерна в сходах за комбайном в единицу времени. Отношение 1V величины интенсивности потерь зерна yi к величине подачи сельхозкультуры qi с ростом нагрузки возрастает и также является функцией скорости комбайна v (кривая fv(v), фиг.1 а). Качество
техпроцесса оценивают величиной параметра работы комбайна K(v), равной абсолютной величине разности отношения величины функции ) и отношения величины функции f д- (v), умноженной на
коэффициент настройки R комбайна на оптимальный режим
K(v) yv)-Rfj(v).(1)
Параметр K(v) также является функцией скорости комбайна v. Эта функция имеет островершинный глобальный минимум при определенном значении скорости v перемещения комбайна по полю. Если в момент достижения минимума функции K(v) угловая скорость вала двигателя со равна допустимому значению со или интенсивность потерь зерна у равна допустимому значению, или одновременно оба этих параметра равны соответственно допустимым значениям, то минимум функции K(v) означает, что достигнуто оптимальное состояние технологического процесса, обеспечивающее оптимальную в данных условиях уборки загрузку двигателя комбайна при максимально возможной подаче и соблюдении аг- родопуска на потери зерна. Значение скорости v перемещения комбайна для такого состояния техпроцесса принимают за оптимальную скорость. Чтобы глобальный минимум функции K(v) однозначно соответствовал оптимуму техпроцесса, коэффициент R настройки комбайна на оптимальный режим определяют следующим образом. Полагают, что при глобальном минимуме функция K(v) имеет значение равное нулю. Затем в момент, когда выполняется любое из трёх указанных условий для параметров ад и у, приравнивают нулю выражение (1) и из полученного уравнения определяют значение коэффициента R по одной из следующих формул
R -5L при од col У
R
.приед-М.и-М
(Oj W0
gi
у
-, при од со, у
где qi - значение подачи сельхозкультуры в момент оптимума техпроцесса.
Изменяя скорость движения комбайна v по полю, всегда можно определить минимум функции K(v). Если при изменении скорости v функция K(v) имеет минимум при условии, что измеренные параметры ад иу| отдельно или вместе не равны допустимым значениям (кривая 1, скорость vi, фиг. 1.6), то такое состояние техпроцесса не является оптимальным. Этот минимум игнорируют, определение нового значения коэффициента R при этом состоянии техпроцесса не
производят и продолжают изменять скорость перемещения комбайна v в прежнем направлении до тех пор, пока измеренные вновь параметры (о и yi вместе или отдельно не примут допустимые значения. Если измеренные параметры од и yi превышают допустимые значения со и у вместе или отдельно, то скорость комбайна v уменьшают до тех пор пока допустимые значения
со и у не будут соблюдены.
Поскольку условия уборки (урожайность и физико-механические свойства убираемой культуры, микро- и макрорельеф и физико- механические свойства почвы и т.п.) меняются, значение коэффициента R настройки комбайна на оптимальный режим и оптимальное значение скорости перемещения комбайна v0rvr (фиг.1.6) переменны и являются случайными функциями времени.
Допустимые величины угловой скорости вала двигателя со и интенсивности потерь зерна у определяют на основе энергетических и агротехнических требований к зерноуборочным комбайнам, регламентированных государственными стандартами. Допустимая величина угловой скорости вала двигателя со составляет 0,92 от угловой скорости холостого хода.. Допустимую величину интенсивности потерь зерна у определяют на основе агродопуска Л на потери зерна по формуле
35
П(1-А1)А-дн
у-Јгде А 0,6 - стандартная величина коэффициента соломистости;
AI - истинная величина коэффициента соломистости для убираемой культуры; ® qH- номинальная подача сельхозкультуры (паспортная характеристика комбайна). Первоначальную величину коэффициента R настройки комбайна на оптимальный режим определяют так, чтобы она была 5 близка к центру группирования случайных величин, определяемых во время уборки. Для этого полагают, что n 0,015;qi qH; Ai А 0,6; ад со 0,92 Шо и определяют коэффициент R из уравнения
If,v-Rfyl 0.
Откуда получаем R 153,3. На блок-схеме системы автоматического управления (фиг.2) показано, что на комбайне 1 установлены датчики 2-4 угловой скорости вала двигателя, интенсивности потерь зерна, подачи сельхозкультуры соответственно, и их выходы подключены к входам измерительного блока 5. Выходы
блока 5 соединены с первыми тремя входами блока 6 сравнения и блока 7 памяти. Три первых выхода блока 6 соединены с входами вычислительного блока 8, а четвертый выход - с первым входом исполнительного механизма регулирования поступательной скорости комбайна (на схеме не выделен). Пятый и шестой входы блока 6 сравнения подключены к шестому и седьмому выходам блока 7 памяти. Четвертый и пятый входы вычислительного блока 8 соединены с одноименными выходами блока 7. Выход вычислительного блока 8 соединен с четвертым входом блока 9 анализа состояния техпроцесса комбайна, представляющего собой блок логики, первые три входа которого соединены с первыми тремя выходами блока 7 памяти. Восьмой выход блока 7 памяти подключен к шестому входу блока 9. Пятый вход блока 9 подключен к второму выходу блока 10 поиска экстремума, представляющему собой экстремальный регулятор. Первый и третий выходы блока 9 анализа подключены соответственно к входу блока 10 и к седьмому входу блока 7 памяти. Вто- рой выход блока 9 подключен к узлам настройки системы стабилизации отдельных параметров техпроцесса по значениям , УОПТ, qom, достигнутым в момент оптимума техпроцесса. Первый выход блока 10 поиска экстремума подключен к второму входу исполнительного механизма регулирования поступательной скорости комбайна. Панель управления 11 соединена тремя выходами с четвертым, пятым и шее- тым входом блока 7 памяти.
Система работает следующим образом (фиг.2).
С помощью датчиков 2-4, установленных на зерноуборочном комбайне 1, и измерительного блока 5 определяют на определенном отрезке времени измерения (например, 20с) средние значения подачи сельхозкультуры qi, интенсивности потерь зерна у и угловой скорости вала двигателя а) . Блок 6 сравнения сравнивает измеренные средние значения угловой скорости вала двигателя и интенсивности потерь зерна с допустимыми значениями а) и у, поступающими с шестого и седьмого выхода бло- ка 7 памяти. Если измеренное среднее значение угловой скорости со меньше допустимого значения со или измеренное среднее значение интенсивности потерь зерна yi больше допустимой величины у, или од- новременно две величины од и yi имеют такие значения, то на четвертом выходе блока 6 сравнения появляется отрицательный сигнал - Д v, подаваемый на первый вход исKi
полнительного механизма регулирования скорости комбайна для уменьшения скорости движения по полю.
Если измеренное среднее значение угловой скорости вала двигателя од больше или равно допустимому значению со или измеренное среднее значение интенсивности потерь зерна yi меньше или равно допустимому значению у, или одновременно две величины ад и yi имеют такие значения, то с блока 6 сравнения значения сигналов од, yi, qi подаются на первые три входа вычислительного блока 8. Вычислительный блок 8 получает от блока 7 памяти значения сигналов R, од, yi и Шо, производит вычисление конкретного значения параметра работы комбайна по формуле
Ж-RJLl
Ш)Qi I
и подает значения сигналов Ki на четвертый
вход блока 9 анализа состояния техпроцесса. Блок 9 анализа получает дополнительную информацию о значениях сигналов R, со, у, од, у, qi с первого, второго, третьего и восьмого выходов блока памяти 7 и производит анализ состояния технологического процесса комбайна следующим образом.Если значение Ki не равно нулю и при этом измеренные значения од и yi не превосходят допустимые со и у, то с первого выхода блока 9 на входа блока 10 поиска экстремума подается значение К. При этом блок 10 поиска экстремума включается в работу и производит шаговый поиск глобального минимума Кэ функции K(v) путем выработки сигналов управления Д v с первого выхода блока 10 на второй вход исполнительного механизма регулирования скорости комбайна. Значение Кэ подается с блока 10 на пятый вход блока 9 анализа состояния техпроцесса и производится новый анализ. Если при этом допуски со и у соблюдены, то блок 9 анализа прекращает подачу сигнала К) с первого выхода на вход блока 10 итем самым отключает блок 10, так как достигается оптимальное состояние техпроцесса комбайна. Если допуски со,у не соблюдены и измеренные средние значения оЛ, yi не превышают допусков, то с первого выхода блока 9 продолжает поступать сигнал на вход блока 10 и поиск нового экстремума функции K(v) продолжается до тех пор, пока допуски не будут соблюдены. Если в момент оптимума техпроцесса, когда измеренные средние значения со и yi равны допускам со и у , значения параметра работы комбайна KI или Кэ не равны нулю, то блок 9 анализа состояния техпроцесса производит вычисление нового значения коэффициента R настройки комбайна на оптимальный режим по формулам
R -|р при ад со, yi
R TyTnpMU
R
.приад М,
Новое значение R с третьего выхода блока 9 подается на седьмой вход блока 7 памяти взамен предыдущего значения.
Если на комбайне имеются системы автоматической стабилизации по параметрам ад( qi, yu то с второго выхода блока 9 анализа состояния техпроцесса подаются сигналы и к узлам настройки этих систем, которые заменяют прежние заданные значения параметров стабилизации на новые О)от, ропт, УОПТ, измеренные в момент достижения оптимума техпроцесса.
После достижения оптимума техпроцесса блок 9 анализа не включает в работу блок 10 поиска экстремума до тех пор, пока сохраняются условия оптимума техпроцесса
Ki 0, при ад ш и у у. При этом скорость v перемещения комбайна по полю не изменяется, а определение средних значений параметров ад, yi, qi на новых отрезках времени измерения продолжается и блок 9 анализа контролирует выполнение условий оптимума техпроцесса.
Если не выполняется условие Ki 0 на i-м шаге измерения параметров ад, qi, yi, то блок 9 анализа определяет новое значение коэффициента R настройки комбайна на оптимальный режим по формуле
R - - -|ур при ад И, у у.
Если не выполняются второе или третье условия оптимума вместе или отдельно и измеренные средние значения ад и yi не выходят за границы допусков со и у, то на первом выходе блока анализа состояния техпроцесса вырабатывается сигнал Ki и блок 10 поиска экстремума включается в работу.
Если измеренные средние значения параметров ад и К; выходят за границы допусков со и у, то на четвертом выходе блока 6 сравнения вырабатывается отрицательный сигнал управления исполнительным механизмом регулирования скорости для уменьшения поступательной скорости движения комбайна по полю. Затем цикл работы системы повторяется вновь.
Пуск системы осуществляется с панели 11 управления. При этом в блок 7 памяти заносятся начальное значение коэффициента настройки комбайна на оптимальный режим и допустимые значения со и у.
Среднее значение угловой скорости холостого хода вала двигателя комбайна при включенных рабочих органах измеряется после пуска системы управления перед
началом движения по полю, когда измеренная подача сельхозкультуры равна нулю. Это значение угловой скорости вала двигателя заносится в блок 7 памяти с первого выхода измерительного блока 5.,
Применение предлагаемого способа позволяет осуществлять адаптивное автоматическое управление технологическим процессом, строить системы управления с параметрической и структурной адаптацией, способные более гибко реагировать на разнообразные переменные условия уборки и тем самым обеспечивать более высокое качество зерна и более высокую производительность, чем системы без
адаптации.
Способ, позволяет значительно сократить время поиска оптимума техпроцесса, исключить зацикливание системы и неустойчивые автоколебательные режимы работы и тем самым обеспечивает более надежную работу комбайна на поле, что повышает производительность и уменьшает расход горючего. Улучшаются условия труда комбайнера,
Формула изобретения
1.Способ автоматического управления технологическим процессом зерноуборочного комбайна, включающий измерение, определение и сравнение средних значений
количества подаваемой хлебной массы и потерь зерна, и изменение скорости комбайна по полученным результатам, отличающийся тем, что, с целью повышения качества обмолота и надежности технологического процесса зерноуборочного комбайна с максимально возможной пропускной способностью и оптимальной загрузкой двигателя при допустимом уровне потерь в условиях изменяющихся характеристик убираемой культуры и поля, измеряют среднее значение угловой скорости вала двигателя, вычисляют относительные величины
f,u
ад
СОо
V--5ад - среднее значение угловой скорости вала двигателя, измеренной за период наблюдения;
coo - среднее значение угловой скорости вала двигателя на холостом ходу с включенными рабочими органами комбайна;
у, - среднее значение интенсивности потерь, измеренное за период наблюдения;
qi - среднее значение подачи массы, измеренное за период наблюдения, и определяют параметр работы зерноуборочного комбайна по формуле
K(v) Iftfj-R I,
где R - коэффициент настройки комбайна на оптимальный режим, равный 153,3 при первом цикле работы, а при K(v) 0, од со, у у или K(v) О, со ы,у| у или K(v) 0, од со, У у - скорость комбайна не меняют, где со - допустимая величина угловой скорости вала двигателя, у - допустимая величина интенсивности потерь зерна, а при K(v) 0, uj со, yi у увеличивают скорость перемещения комбайна, а при yi у, од со уменьшают
поступательную скорость комбайна, при этом проводят повторный замер вышеперечисленных параметров и по ним определяют коэффициент настройки и вычисляют новое значение параметра работы комбайна.
2.Способ по п. 1,отличающийся тем, что определение нового коэффициента настройки производят в момент достижения минимального значения параметра работы комбайна по формулам:
R- - fSfp при K(v)0,a, u.yi
R - --jypnPnK(V)0,,
yl: ,У
R
со
(Оо
JL П
при K(v) 0, (0( со,у j у.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ СОЛОМОСЕПАРАТОР | 1993 |
|
RU2061363C1 |
| Зерноуборочный комбайн | 1987 |
|
SU1528373A1 |
| ОТБОЙНЫЙ БИТЕР МОЛОТИЛЬНО-СЕПАРИРУЮЩЕГО УСТРОЙСТВА | 1994 |
|
RU2093006C1 |
| Следящий привод для системы охлаждения двигателя зерноуборочного комбайна | 1974 |
|
SU552041A1 |
| Сепарирующее устройство зерноуборочного комбайна | 1987 |
|
SU1501970A1 |
| Зерноуборочный комбайн | 1986 |
|
SU1346069A1 |
| Клавишный соломотряс | 1987 |
|
SU1553031A1 |
| Половонабиватель зерноуборочного комбайна | 1981 |
|
SU986336A1 |
| Жатка зерноуборочного комбайна | 1981 |
|
SU1066486A1 |
| БУНКЕР ЗЕРНОУБОРОЧНОГО КОМБАЙНА ДЛЯ СБОРА ПРОДУКТОВ ОБМОЛОТА | 1998 |
|
RU2143797C1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к зерноуборочным комбайнам. Цель изобретения - повышение качества обмолота и надежности технологического процесса зерноуборочного комбайна с максимально возможной пропускной способностью и оптимальной загрузкой двигателя при допустимом уровне потерь в условиях изменяющихся характеристик убираемой культуры и поля. Способ автоматического управления технологическим процессом зерноуборочного комбайна заключается в том, что измеряют на определенном (например, 20с) отрезке времени средние значения подачи сельхозкультуры qi, интенсивности потерь зерна yi, угловой скорости вала двигателя комбайна при обмолоте сельхозкультуры од и на холостом ходу с включенными рабочими органами (Do, вычисляют относительные величины fw Од/Одэ и f yi./qi умножают величину f на коэффициент R настройки комбайна на оптимальный режим, равный при первом цикле работы 153,3, определяют параметр работы комбайна по формуле K(v) |fy- Rf у|, если параметр K(v) равен нулю или больше нуля и средние значения од и yi превышают допустимые значения а и у, то скорость перемещения комбайна v уменьшают, если параметр K(v) равен нулю и средние значения ОД и yi равны допустимым значениям и у, то скорость перемещения комбайна не меняют, если параметр K(v) равен или больше нуля и средние значения од и yi не равны и не превышают допустимые значения и у, то скорость перемещения комбайна увеличивают, при этом проводят повторный замер параметров од , gi, yi и по ним вычисляют новое значение параметра работы комбайна K(v) и в момент, когда параметр K(v) имеет минимальное значение, определяют новый коэффициент настройки комбайна на оптимальный режим по формулам R w / y0-qi y, при K(v) О,ОД ш, yi R од/одэ-qity, при K(v) О, ОД со, yi R co /Wo-qi/yi при K(v) 0, од со, yi у. 1 з.п.ф-лы, 2 ил. сл С х| ГО О СЛ J сл
fc fl ronm
Фиг.1
W
Umax
Фиг. 2
| Система автоматического регулирования и контроля технологического процесса зерноуборочного комбайна | 1981 |
|
SU959682A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
