зирования антенн используют глазомерный способ, что резко снижает точность измерений.
Наиболее близким к предлагаемому по технической сущности является устройство ДЭМП-3 для поиска тектонических нарушений, других геологических неоднородно- отей, которое включает передатчик и приемник, передающую и приемную антенны, штативы с антенными столиками.
Недостатком известного устройства является низкая точность определения границ тектонических нарушений угольного пласта, большая трудоемкость процесса измерений, обусловленная необходимостью в каждой точке поискового профиля вручную производить ориентирование в пространстве приемной и передающей антенн, на что уходит большая часть времени измерений, Кроме того, поскольку взаимное визирование антенн производится глазомерным способом, который обеспечивает точность визирования 3-4°. погрешность измерений может достигать 25-40%. так как используется вариант, наведения минимума диаграммы направленности передающей антенны, имеющей вид восьмерки, на приемную. При такой погрешности гарантированы случаи пропуска полезной аномалии. Глазомерное визирование передающей и приемной антенны резко ухудшают точность измерений.
Целью изобретения является повышение точности определения границ тектонических нарушений угольного пласта, снижение трудоемкости процесса измерений.
Поставленная цель достигается тем, что в устройстве, включающем передающую рамочную антенну, соединенную с первой визирной трубой, и передатчик радиоволн, установленные на первом штативе, приемную антенну, соединенную с второй визирной трубой и приемником радиоволн, установленными на втором штативе, гибкую связь, прикрепленную к передающей антенне и штативам, штативы снабжены токо- непроводящими .штангами, которые прикреплены к штативам с возможностью вращения в верхней их части, а передающая и приемная антенны закреплены в нижних частях соответствующих токонепроводя- щих штанг, образуя свободно подвешенные шарнирные маятники, при этом штанги снабжены рычагами, которые соединены между собой гибкой связью с возможностью регулирования положения указанных антенн усилием, определяемым из соотношения
ор
Рнат Р
опр,
где Pop - усилие необходимое для ориентирования передающей антенны;
Рнат - усилие натяжения гибкой связи; Ропр - усилие опрокидывания штатива
передающей антенны.
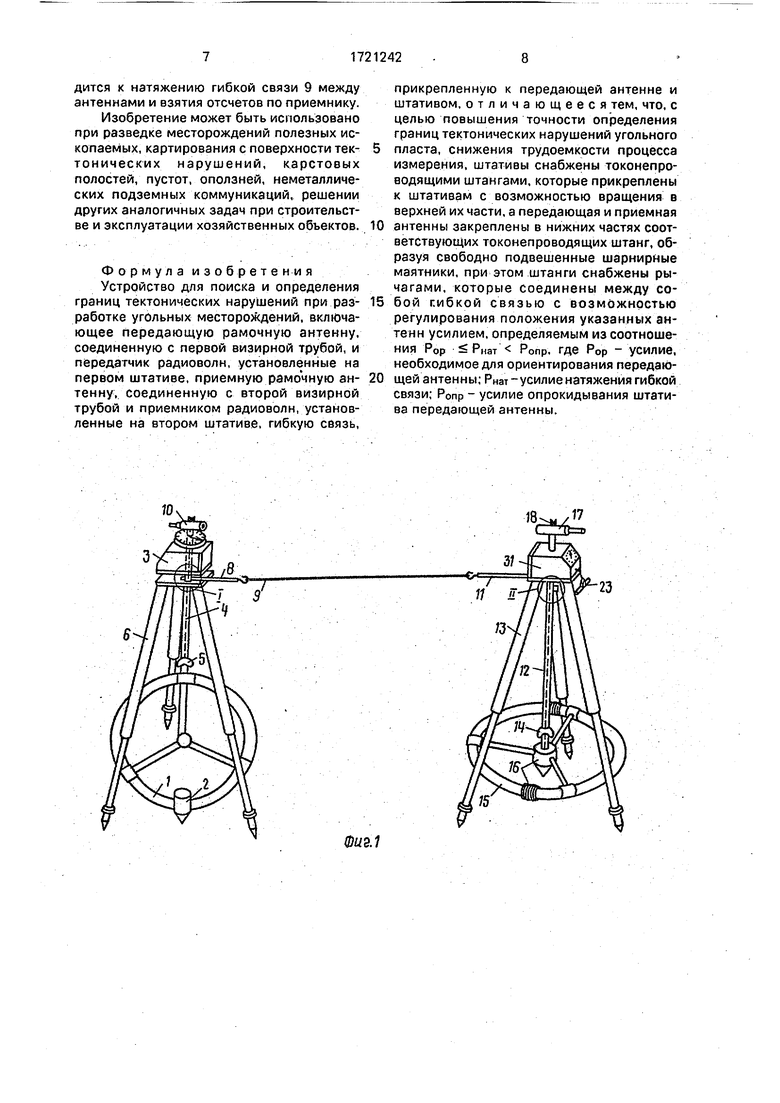
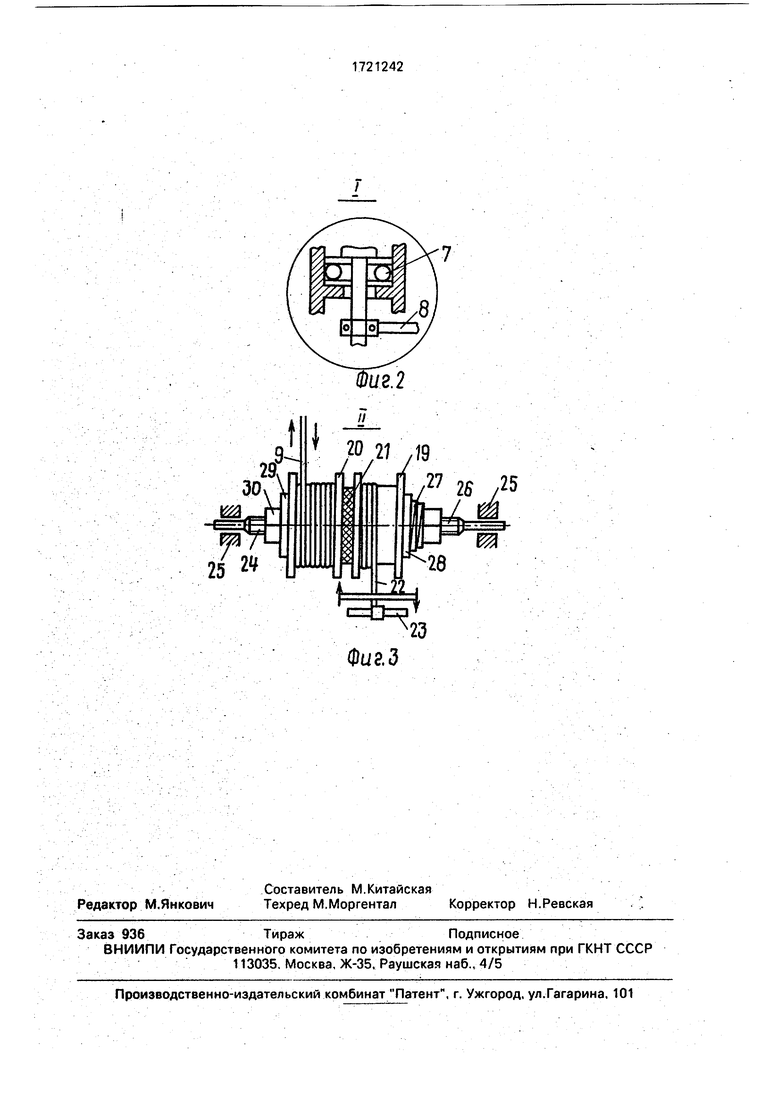
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - узел I на фиг. 1 (подшипник с рычагом); на фиг. 3 - узел II на фиг. 1 (фрикционный блок).
0 Устройство включает передающую антенну 1 с центровочным грузом 2. Антенна 1 подвешена к передатчику 3 посредством токонепроводящей штанги 4 через расположенный на ней карданный шарнир 5. Штан5 га 4 укреплена с возможностью вращения в верхней части штатива 6 посредством упорного подшипника 7, под которым к штанге 4 жестко прикреплен рычаг 8, который прикреплен к одному концу гибкой связи 9.
0 К верхней части штанги 4 жестко прикреплена первая визирная труба 10с алидадой и визирной маркой таким образом, что ее коллимационная плоскость совпадает с продольной осью рычага 8 и плоскостью
5 витков передающей антенны 1.
Второй конец гибкой связи 9 прикреплен через рычаг-трубу 1.1 к барабану 21 фрикционного блока, который, в свою очередь, жестко связан с верхней частью токо0 непроводящей штанги 12 с возможностью вращения в верхней части штатива 13 посредством упорного подшипника 7, под торым к штанге 12 жестко прикреплен рычаг-трубка 11. К нижней части штанги 12
5 через карданный шарнир 14 прикреплена приемная антенна 15. образующая совместно с центрировочными грузами 16 свободно подвешенный маятник. При этом верхняя часть токонепроводящей штанги 21 снабже0 на второй визирной трубкой 17 с визирной маркой 18. К второму барабану 19 фрикционного блока, фрикционно связанному с барабаном 20 через прокладку 21, прикреплена нить 22 натяжения с ручкой 23.
5 Барабан 20 жестко, а барабан 19 свободно закреплены на оси 24, вращающейся в подшипниках 25, и соединены с фрикционной прокладкой 21. При этом свободная сторона барабана 20 закреплена на оси 24 гайкой 26
0 и шайбой 27, а свободная сторона барабана 19 - пружиной 28, шайбой 29 и гайкой 30.
Предлагаемое устройство работает следующим образом.
Штатив 6 передающей части устройства
5 располагают в заданной точке профиля. При этом антенна 1, благодаря грузу 2 колеблясь в шарнире 5, занимает вертикальное положение, причем благодаря карданному шарниру 5 колебания антенны 1 могут происходить только в направлении, перпендикулярном плоскости чертежа, т.е. плоскости витков антенны.
Одновременно, в другой заданной точке поискового профиля располагают штатив 13 приемной части устройства. При этом антенна 15 вместе с центровочными грузами 16, колеблясь под действием силы тяжести в шарнире 14, занимает горизонтальное положение, причем благодаря карданному шарниру 14 колебания антенны 15 могут происходить только вокруг лежащей в плоскости чертежа горизонтальной оси. которая перпендикулярна вертикальной оси вращения штанги 12.
После установки штативов 6 и 13 в заданных точках поискового профиля и успокоения антенн 1 и 15 ручкой 23 натягивают нить 22 со стороны приемной части устройства.
При этом, вращаясь, барабан 19 с помощью силы трения, которая регулируется пружиной 27, увлекает за собой барабан 20, т.е. натягивает гибкую связь. Одновременно с этим поворачиваются в горизонтальной плоскости рычаг 8 и рычаг-труба 11.
Гибкую связь 9 натягивают до тех пор, пока продольная ось рычага 8 не совпадает с продольной осью рычага-трубки 11 и осью гибкой связи 9, что будет соответствовать предварительному наведению плоскости витков передающей антенны на центр приемной антенны 15. При этом антенны 1 и 15 регулируют усилием натяжения, определяемым из соотношения
Pop 2s Рнат. Ропр,
где Pop - усилие, необходимое для ориентирования передающей антенны;
Рнат - усилие натяжения гибкой связи 9;
Ропр-усилие опрокидывания штатива 6 передающей антенны 1.
После установки штативов б и 13 в заданных точках поискового профиля и успокоения антенн 1 и 15 оператор приступает к взаимному ориентированию антенн 1 и 15. Усилие, требуемое для выполнения этой операции обозначим через Р0р. Оператор тянет ручку 23, при. этом начинает вращаться барабан 19. Одновременно с барабаном 19 за счет силы трения между барабанами 19 и 20 и фрикционной прокладкой 21, зависящей от усилия сжатия пружины 27 гайкой 26, вращается и барабан 20, наматывая гибкую связь и натягивая ее. Это и будет усилие
Рнат.
Происходит свободное вращение всего фрикционного узла в подшипниках 25, во время которого нить 22 натяжения вместе с ручкой сматывается с барабана 20. За счет натяжения гибкой связи 9 поворачивается рычаг 8 и рычаг-трубка 11 и происходит автоматическое взаимное ориентирование антенн 1 и 15.
Натяжение связи 9 оператор проводит до тех пор, пока усилие натяжения Рнат, дей- 5 ствующее на барабан 20. не станет равным или большим усилия ориентирования Pop,
Поскольку натягивание гибкой связи 9 обусловлено лишь субъективными ощущениями оператора, тянущего ручку 23, то не
0 исключено было падение штатива 6 за счет сильного натяжения гибкой связи 9 при повышении усилия натяжания Рнат усилия, требуемого для опрокидывания штатива 6, Поэтому в предлагаемом устройстве пре5 дусмотрена возможность регулирования усилия натяжения Рнат., натяжение связи 9 осуществляется до тех пор, пока усилие сжатия фрикционного диска 21, установится меньшим усилия опрокидывания штатива б,
0 после чего барабан 20 остановится, а барабан 19 будет вращаться.
Момент проскальзывания отмечается оператором, который, удерживая ручку 23 и нить 22 в натянутом состоянии, производит
5 отсчет по приемнику и дает команду рабочему, который находится возле штатива 6 на дальнейшую переноску всего устройства вдоль поискового профиля, отпускает ручку 21 и первым начинает движение.
0 Штатив б некоторое время остается неподвижным. При этом гибкая связь сматывается с барабана 20, вращая его в сторону, обратную намотке. Одновременно с барабаном 20 за счет силы трения будет вращаться
5 барабан 19, который автоматически намотает нить 22 с ручкой 23, устанавливая ее в исходное положение. Далее, вращая в небольших пределах первую визирную трубу 10 вокруг вертикальной оси и наблюдая че0 рез нее визирную марку 18. добиваются точного совпадения центральной риски трубы 10 с маркой 18, чем обеспечивают точное взаимное визирование антенн 1 и 15.
Затем включают передатчик 3, берут от5 счет по приемнику 31, после чего переносят штативы 6 и 13 в новые заданные точки поискового профиля.
Преимущество предлагаемого изобре- 0 тения заключается в исключении глазомерного визирования антенн, автоматизации процесса ориентирования в каждой точке поискового профиля приемной и передающей антенн, что позволяет существенно по- 5 высить точность измерений, снизить трудоемкость процесса измерений, значительно повысить производительность поисково-съемочных работ, сократить количество операций при измерениях, так как весь процесс сьемки практически сводится к натяжению гибкой связи 9 между антеннами и взятия отсчетов по приемнику. Изобретение может быть использовано при разведке месторождений полезных ископаемых, картирования с поверхности тектонических нарушений, карстовых полостей, пустот, оползней, неметаллических подземных коммуникаций, решении других аналогичных задач при строительстве и эксплуатации хозяйственных объектов.
Формула изобретения Устройство для поиска и определения границ тектонических нарушений при разработке угольных месторождений, включающее передающую рамочную антенну, соединенную с первой визирной трубой, и передатчик радиоволн, установленные на первом штативе, приемную рамочную антенну, соединенную с второй визирной трубой и приемником радиоволн, установленные на втором штативе, гибкую связь,
прикрепленную к передающей антенне и штативом, отличающееся тем, что, с целью повышения точности определения границ тектонических нарушений угольного
пласта, снижения трудоемкости процесса измерения, штативы снабжены токонепро- водящими штангами, которые прикреплены к штативам с возможностью вращения в верхней их части, а передающая и приемная
антенны закреплены в нижних частях соответствующих токонепроводящих штанг, образуя свободно подвешенные шарнирные маятники, при этом штанги снабжены рычагами, которые соединены между собой гибкой связью с возможностью регулирования положения указанных антенн усилием, определяемым из соотношения Pop Рнат Ролр. где Pop - усилие, необходимое для ориентирования передающей антенны; Рнат -усилиенатяжения гибкой связи; Ропр - усилие опрокидывания штатива передающей антенны.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ РАДИОВОЛНОВЫМ МЕТОДОМ | 2006 |
|
RU2328021C2 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ЛОКАЛЬНЫХ НЕОДНОРОДНОСТЕЙ И ГЕОДИНАМИЧЕСКИХ ЗОН ВЕРХНЕЙ ЧАСТИ ГЕОЛОГИЧЕСКОГО РАЗРЕЗА ВЧР | 2008 |
|
RU2363964C1 |
| Комбинированный металло-газоиндикатор | 2023 |
|
RU2815363C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ТРАНШЕИ | 1990 |
|
RU2025647C1 |
| Игрушка "Управляемая модель вертолета | 1986 |
|
SU1437057A1 |
| Двухканальный индукционно-радиоволновый металлоискатель с двухуровневым поисковым элементом | 2024 |
|
RU2835380C1 |
| Устройство для выборочной печати | 1974 |
|
SU571205A3 |
| Локатор для определения местоположения зонда при горизонтально направленном бурении | 2024 |
|
RU2831103C1 |
| Устройство для перемещения шкалы | 1972 |
|
SU444056A1 |
| Устройство для демонстрации особенностей распространения радиоволн | 1982 |
|
SU1167641A1 |
Изобретение относится к горному делу и м.б. использовано для определения границ тектонических нарушений при подземной разработке пластовых месторождений, в частности угля на шахтах, не опасных по газу. Цель - повышение точности определения границ тектонических нарушений угольного пласта, снижение трудоемкости процесса измерений. Устр-во содержит передающую рамочную антенну, соединенИзобретен ие относится к горному делу и может быть использовано для определения границ тектонических нарушений при подземной разработке пластовых месторождений, в частности угля на шахтах не опасных по газу. Известны устройства для поиска и определения границ тектонических нарушений при разработке угольных месторождений, содержащие передатчик и приемник, пере,ную с первой визирной трубой, и передатчик радиоволн, установленные на первом штативе, приемную рамочную антенну, соединенную с второй визирной трубой и приемником радиоволн, установленные на втором штативе, гибкую связь, прикрепленную к передающей и приемной антеннам и штативам, Причем штативы снабжены непроводящими штангами, которые прикреплены с возможностью вращения верхними частями и указанным штативом в их верхней части, Передающая и приемная антенны закреплены в нижних частях соответствующих непроводящих штанг, представляя собой свободно подвешенные шарнирные маятники. При этом штанга передающей антенны снабжена рычагом, который прикреплен к ней и к гибкой связи с возможностью регулирования положения указанных антенн усилием, определяемым из соотношения Pop Рнат. Ропр где Р0р, - усилие, необходимое для ориентирования передающей антенны; Рнат. - усилие натяжения гибкой связи; Ропр. - усилие опрокидывания штатива передающей антенны. 3 ил. дающую и приемную антенны, закрепленные на штативах. Однако эти устройства не содержат приспособлений, которые позволяют автоматически ориентировать в пространстве передающую и приемную антенны в заданных плоскостях. Это вынуждает использовать ручную ориентацию с помощью отвесов, круглых и цилиндрических уровней, на что уходит много времени. Кроме того, в этих устройствах для взаимного висл с vj Ю го 4 Ю
Фиэ.1
23
ДЖ/га
ФиаЗ
25
| Велиев А.В, и др | |||
| Электромагнитное профилирование | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Кузнечный горн | 1921 |
|
SU215A1 |
