gn---1Н--Угй
гй
СО
о
01
vl
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подвода питания к подвижному потребителю | 1984 |
|
SU1251222A1 |
| Игральное устройство | 1981 |
|
SU1012930A1 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА С ГОЛОНОМНЫМ ВАРИАТОРОМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2011555C1 |
| ШВАРТОВОЧНО-ТАКЕЛАЖНОЕ УСТРОЙСТВО ВЕРТОЛЁТА | 2023 |
|
RU2819338C1 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
| Устройство для поворота машинно-тракторного агрегата | 1987 |
|
SU1505455A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2013 |
|
RU2547667C1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Канатоукладчик | 1980 |
|
SU943190A1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС АВИАНЕСУЩЕГО КОРАБЛЯ | 2012 |
|
RU2494005C1 |
Изобретение относится к производству игрушек и позволяет повысить занимательность путем изменения радиуса полета модели 5 без изменения баланса между ней и балансным грузом 4. Игрушка содержит основание 1 со стойкой 2, штангу 3, шарнирно установленную в верхней части стойки 2, балансный груз 4 и модель вертолета 5, установленные на противоположных плечах штанги 3, при этом модель вертолета 5 шарнирно подвешена посредством токопроводя- ших штанг 30, установленных на штанге 3 с возможностью продольного перемешения. Штанга 3 снабжена средством одновременного радиального перемешения модели вертолета 5 и балансного груза 4, имеюшим кинематически соединенные с балансным грузом 4 через передаточный механизм токо- проводяшие штанги 30. Передаточный механизм состоит из электродвигателя 33, редуктора 43 и барабана 44. 3 з.п.ф-лы, 8 ил.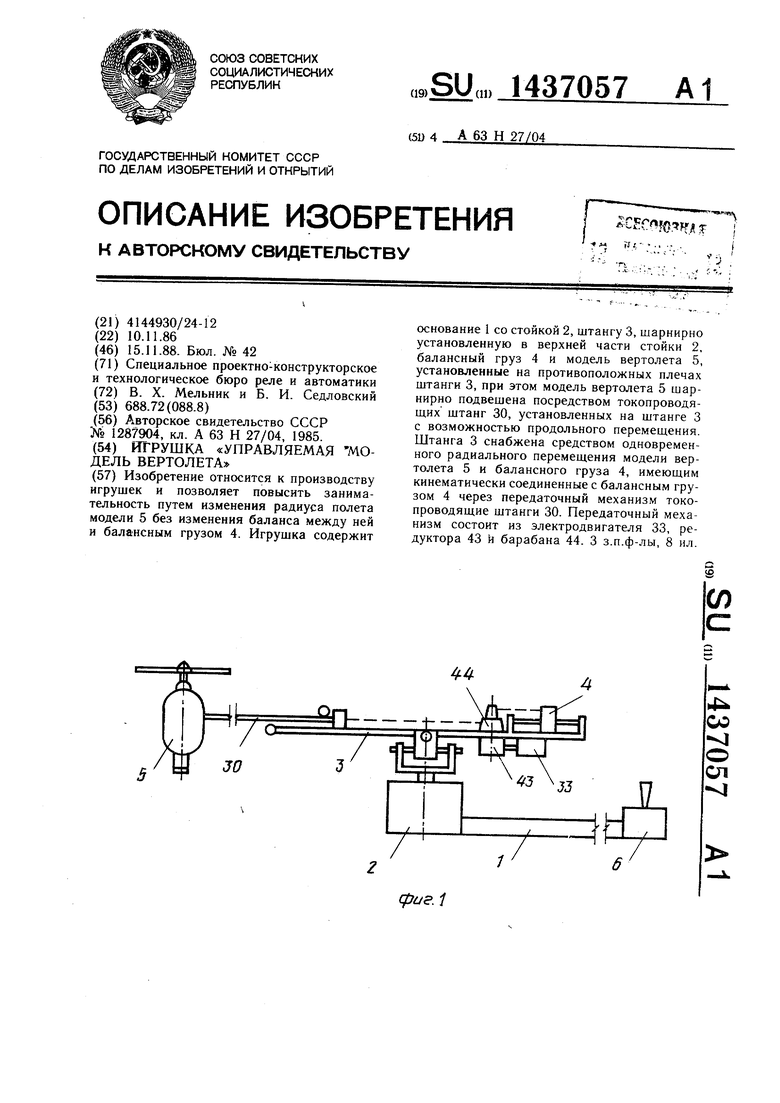
(риг. 1
1
1437057 производству
Изобретение относится к игрушек.
Цель изобретени$г - повышение занимательности, путем изменения радиуса полета модели летательного аппарата без изменения баланса между ней и грузом.
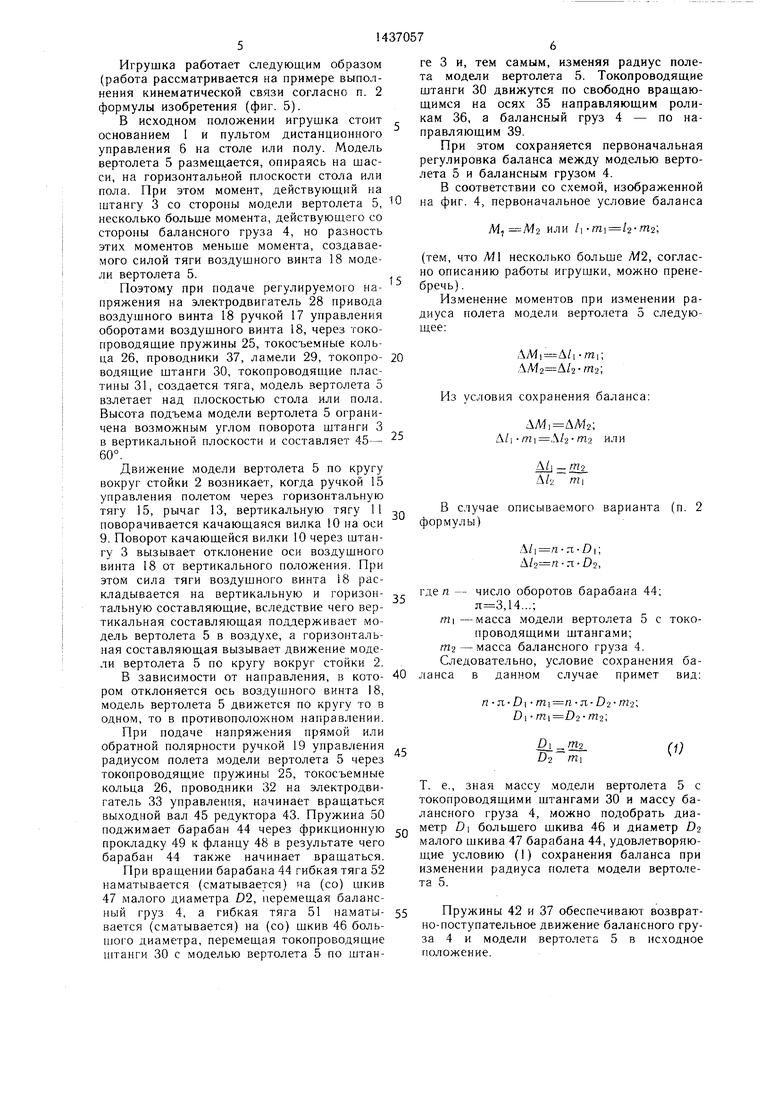
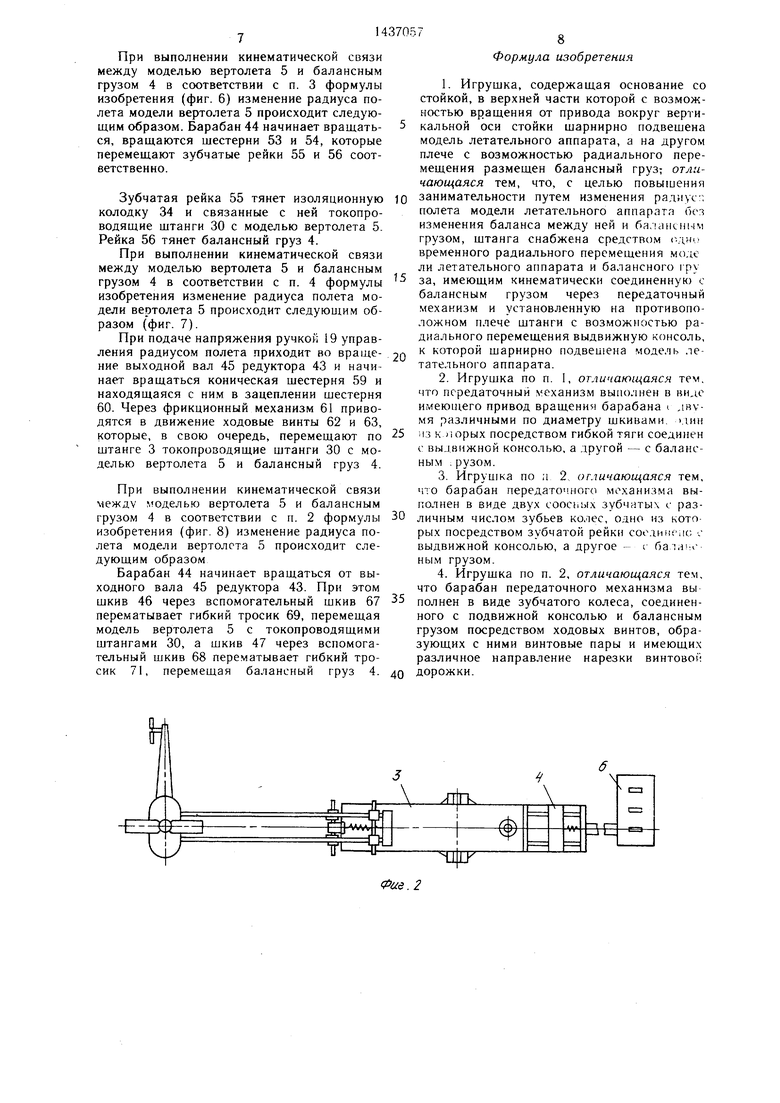
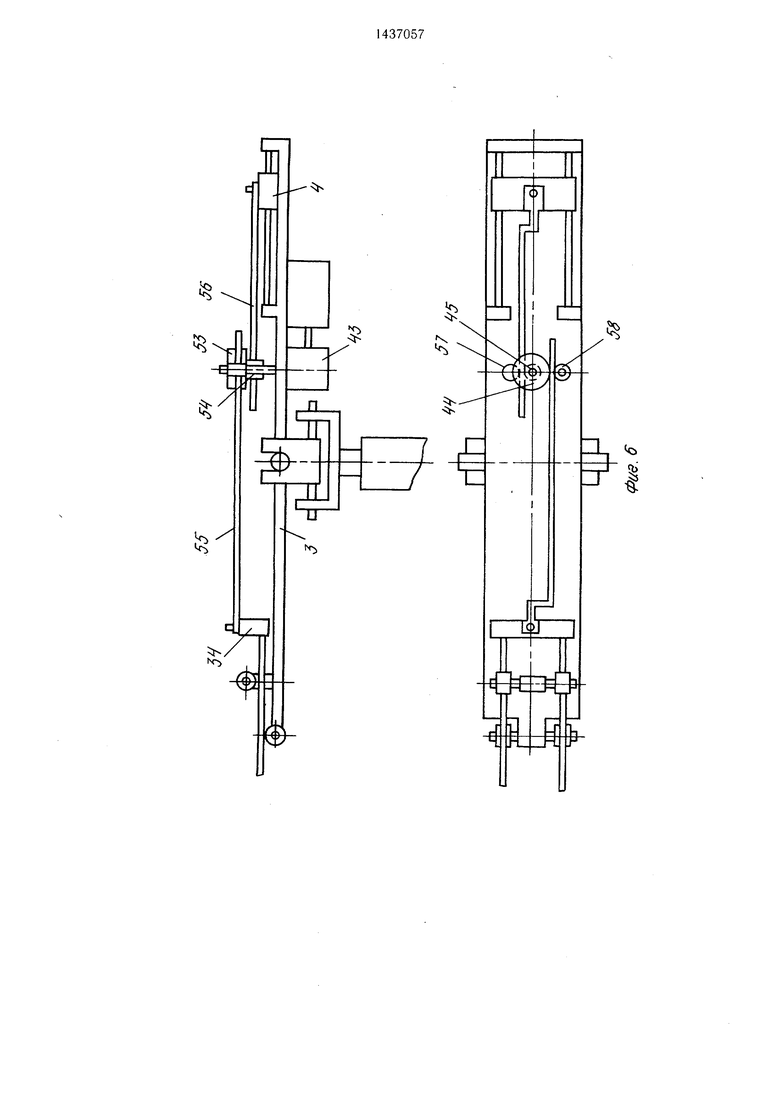
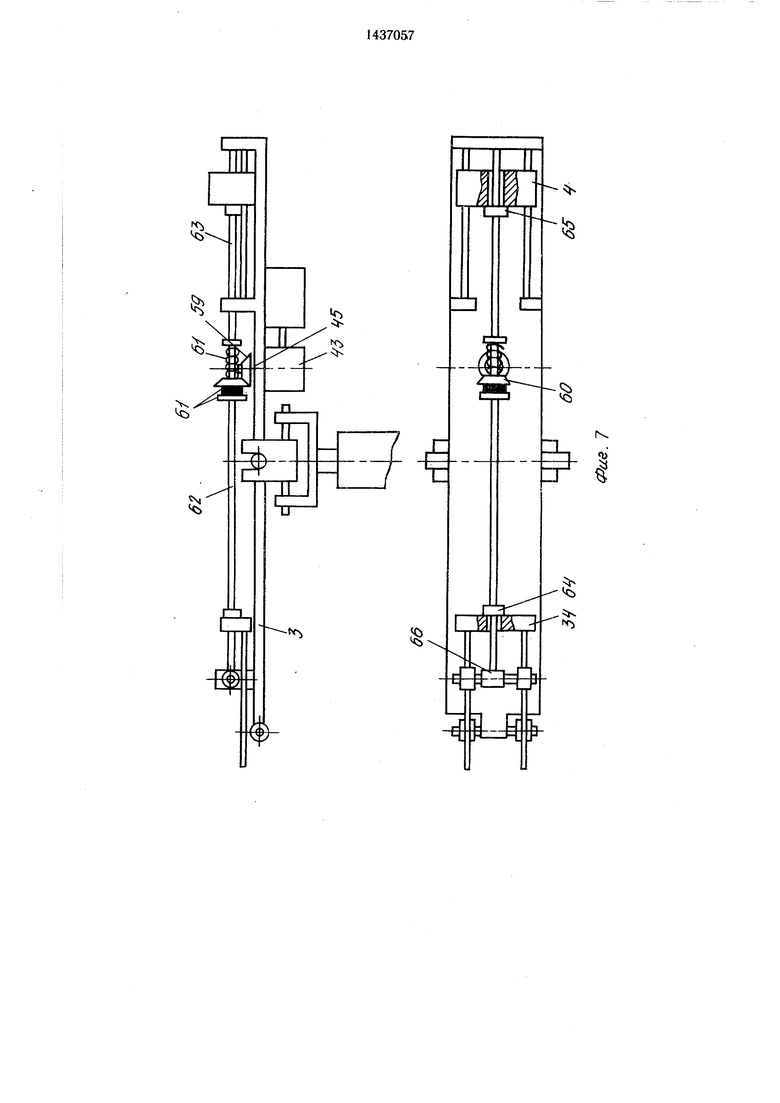
На фиг. 1 схематически изображена иг- рушка, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку; на фиг. 4 - схема сохранения баланса между моделью летательного аппарата и балансным грузом; на фиг. 5 - с выполнением барабана передаточного механизма с двумя шкивами, в изометрии; на фиг. 6 - то же, с барабаном передаточного механизма, выполненным в виде двух соосных зубчатых колес; на фиг. 7 - то же, выполненным в виде конического зубчатого колеса; на -фиг. 8 - то же, с двумя шкивами.
Игрушка состоит из основания 1 со стойкой 2, шарнирно установленной в верхней части стойки 2, штанги 3, на одном плече которой размеш.ен балансный груз 4, а на другом плече шарнирно подвешена модель летательного аппарата, выполненная в виде модели вертолета 5, пульта дистанционного управления 6, жестко соединенного с основапроводящих штанг 30, токопроводящие пластины 31. Токосъемные кольца 26 посредством проводников 32 электрически соединены с электродвигателем 33 управления радиусом полета модели вертолета 5.
Модель вертолета 5 соединена с токо- проводящнми штангами 30 шарнирно. Шарнирное соединение выполнено в виде токо- проводящих пластин 31, закрепленных в корпусе модели вертолета 5, в которых вы1 о полнены отверстия, куда установлены отогнутые концы токопроводящих штанг 30. С другой стороны токопроводящие штанги 30 закреплены жестко в изоляциоиной колодке 34. Со стороны модели вертолета 5 на штанге 3 установлены каждая на своей оси 35
две пары направляющих роликов 36, имеющих возможность свободно вращаться относительно оси 35, и взаимодействующие с токопроводящими штангами 30.
К изоляционной колодке 34 подсоедине20 на одним концом пружина 37, второй конец которой подсоединен к выступу 38 штанги 3. Балансный груз 4 установлен на направляющих 39, жестко закрепленных своими концами в выступах 40 и 41 штанги 3 и подсоединен пружиной возврата 42 к выстунием 1. Модель вертолета 5 и балансный 25 пу 41. При этом штанга 3 снабжена средст30
груз 4 установлены на штанге 3 с возможностью возвратно-поступ ательного перемещения параллельно ее продольной оси. Стойка 2 имеет кронштейн 7 с полой полуосью, установленный на опорном подшипнике 8 с возможностью вращения относительно стойки 2. На кронштейне 7 закреплена ось 9, на которой с возможностью качания установлена вилка 10. На вилке 10 шарнирно установлена штанга 3. Вилка 10 через вертикальную тягу 11, шаровую опору 12, рычаг 13, ось 14 и горизонтальную тягу 15, проходяшую внутри основания 1, связана с ручкой управления 16 полетом модели вертолета 5, размешенной в пульте управления 6.
В пульте управления 6 размещены также 40 ручки 17 управления оборотами воздушного винта 18 модели вертолета 5, связанная с переменным резистором (не изображен) и ручка 19 управления радиусом полета модели вертолета 5, связанная с переключатевом одновременного радиального перемещения модели вертолета 5 и балансного груза 4, имеющим кинематически соединенные через передаточный механизм токопроводящие штанги 30 и балансный груз 4. Передаточный механизм состоит из смонтированных на штанге 3 электродвигателя 33 и соединенного с ним редуктора 43, на выходном валу которого установлен барабан 44. Кинематическая связь осуществляется из
35
условия 1, где Д/,
путь, который
проходит центр массы подвижной системы - модель вертолета и токопроводящие штанги; Д/2 - путь, который проходит центр массы балансного груза; mi - масса подвижной системы модели вертолета и токопроводящих штанг; /Л2 - масса балансного груза.
Одним из вариантов выполнения кинематической связи является следующий (см. лем полярности напряжения (не изображен). фиг. 5).
Ручка 16 установлена на оси 20 и снаб-Установленный на выходном валу 45 режена устройством фиксации положения, вы-дуктора 43 барабан 44 имеет два шкива 46
полненным в виде фрикционной прокладки 21, шайбы 22, вращение которой предотвращает стопор 23, а также пружины 24. В корпусе стойки 2 размещены токопроводящие пружины 25, взаимодействующие с токосъемными кольцами 26, установленными на полой полуоси вращаюидегося кронштейна 7. Токосъемные кольца 26 посредством проводников 27 электрически сое- 55 диаметра Д2 шкива 47 и связан с динены с приводом 28 воздушного винта 18моделью вертолета 5 посредством гибкой
через токопроводящие ламели 29, выдвиж-тяги 51, концы которой жестко закрепленую консоль, выполненную в виде токе-ны соответственно на изоляционной колод50
и 47, выполненных различными по диаметру, (Д1 и Д2 соответственно). Барабан 44 установлен на валу 45 посредством жестко- скрепленного с валом 45 фланца 48, сцепленного с барабаном 44 через фрикционную прокладку 49. При этом барабан 44 поджат к ней посредством пружины 50. Шкив 46 выполнен диаметром Д1, боль
проводящих штанг 30, токопроводящие пластины 31. Токосъемные кольца 26 посредством проводников 32 электрически соединены с электродвигателем 33 управления радиусом полета модели вертолета 5.
Модель вертолета 5 соединена с токо- проводящнми штангами 30 шарнирно. Шарнирное соединение выполнено в виде токо- проводящих пластин 31, закрепленных в корпусе модели вертолета 5, в которых выполнены отверстия, куда установлены отогнутые концы токопроводящих штанг 30. С другой стороны токопроводящие штанги 30 закреплены жестко в изоляциоиной колодке 34. Со стороны модели вертолета 5 на штанге 3 установлены каждая на своей оси 35
две пары направляющих роликов 36, имеющих возможность свободно вращаться относительно оси 35, и взаимодействующие с токопроводящими штангами 30.
К изоляционной колодке 34 подсоединена одним концом пружина 37, второй конец которой подсоединен к выступу 38 штанги 3. Балансный груз 4 установлен на направляющих 39, жестко закрепленных своими концами в выступах 40 и 41 штанги 3 и подсоединен пружиной возврата 42 к выступу 41. При этом штанга 3 снабжена средст0
вом одновременного радиального перемещения модели вертолета 5 и балансного груза 4, имеющим кинематически соединенные через передаточный механизм токопроводящие штанги 30 и балансный груз 4. Передаточный механизм состоит из смонтированных на штанге 3 электродвигателя 33 и соединенного с ним редуктора 43, на выходном валу которого установлен барабан 44. Кинематическая связь осуществляется из
35
условия 1, где Д/,
путь, который
дуктора 43 барабан 44 имеет два шкива 46
диаметра Д2 шкива 47 и связан с моделью вертолета 5 посредством гибкой
и 47, выполненных различными по диаметру, (Д1 и Д2 соответственно). Барабан 44 установлен на валу 45 посредством жестко- скрепленного с валом 45 фланца 48, сцепленного с барабаном 44 через фрикционную прокладку 49. При этом барабан 44 поджат к ней посредством пружины 50. Шкив 46 выполнен диаметром Д1, больке 34 и шкиве 46, а шкив 47 диаметром Д2 связан гибкой тягой 52 с балансным грузом 4, концы которой жестко закреплены соответственно на шкиве 47 и балансном грузе 4. Условие кинематической связи модели вертолета 5 и балансного груза 4 определяется условием
DI ,
D2 mi
где/
мо-диаметр шкива, связанного с делью вертолета;
D2 - диаметр шкива, связанного с противовесом;гп - масса модели вертолета и токопроводящих штанг; т2 - масса балансного груза. Один из вариантов выполнения кинематической связи изображен на фиг. 6.
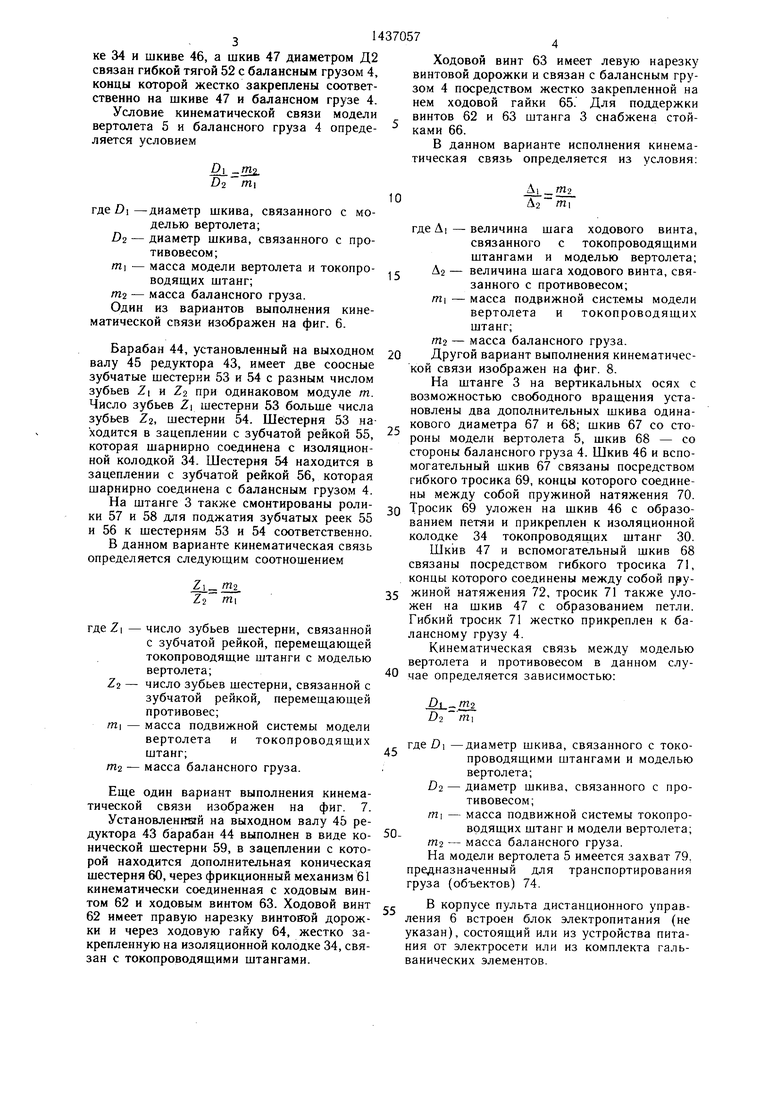
Барабан 44, установленный на выходном 20 валу 45 редуктора 43, имеет две соосные зубчатые шестерни 53 и 54 с разным числом зубьев Zi и Z2 при одинаковом модуле т. Число зубьев Zi шестерни 53 больше числа зубьев Z2, шестерни 54. Шестерня 53 на ходится в зацеплении с зубчатой рейкой 55, 25 которая шарнирно соединена с нзоляцион- ной колодкой 34. Шестерня 54 находится в зацеплении с зубчатой рейкой 56, которая шарнирно соединена с балансным грузом 4.
А1 . тг А2 т
где А: - величина шага ходового винта, связанного с токопроводяшими штангами и моделью вертолета; А2 - величина шага ходового винта, связанного с противовесом; /П: - масса подрижной системы модели вертолета и токопроводящих штанг;
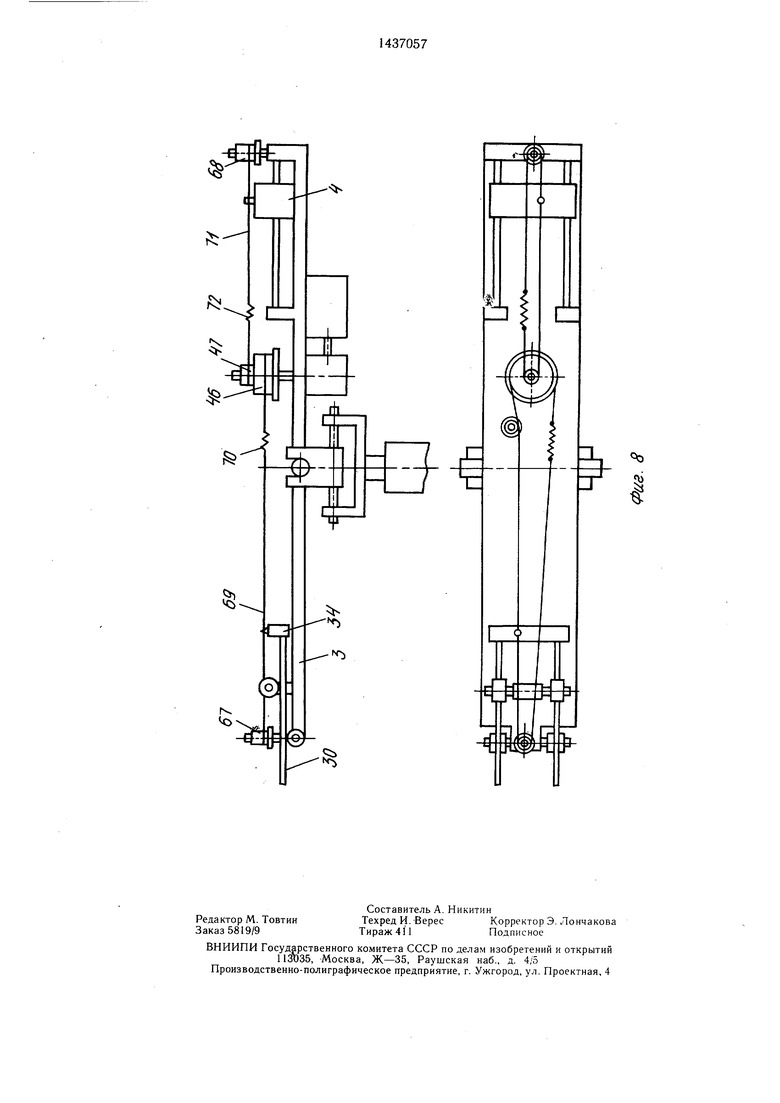
/П2 - масса балансного груза. Другой вариант выполнения кинематической связи изображен на фиг. 8.
На штанге 3 на вертикальных осях с возможностью свободного врашения установлены два дополнительных шкива одинакового диаметра 67 и 68; шкив 67 со стороны модели вертолета 5, шкив 68 - со стороны балансного груза 4. Шкив 46 и вспомогательный шкив 67 связаны посредством гибкого тросика 69, концы которого соединены между собой пружиной натяжения 70.
На штанге 3 также смонтированы роли- Тросик 69 уложен на шкив 46 с образоки 57 и 58 для поджатия зубчатых реек 55 и 56 к шестерням 53 и 54 соответственно. В данном варианте кинематическая связь определяется следующим соотношением
гдeZ| -число зубьев шестерни, связанной
с зубчатой рейкой, перемешающей
токопроводящие штанги с моделью
вертолета; Z2 - число зубьев шестерни, связанной с
зубчатой рейкой, перемещающей
противовес; т - масса подвижной системы модели
вертолета и токопроводящих
штанг; /П2 - масса балансного груза.
35
40
45
ванием петяи и прикреплен к изоляционной колодке 34 токопроводящих штанг 30.
Шкив 47 и вспомогательный шкив 68 связаны посредством гибкого тросика 71, концы которого соединены между собой пружиной натяжения 72, тросик 71 также уложен на шкив 47 с образованием петли. Гибкий тросик 71 жестко прикреплен к балансному грузу 4.
Кинематическая связь между моделью вертолета и противовесом в данном случае определяется зависимостью:
.Dj..,m2 DI т
где/ -диаметр шкива, связанного с токопроводящими штангами и моделью вертолета;
Еще один вариант выполнения кинематической связи изображен на фиг. 7.
Установленннй на выходном валу 45 редуктора 43 барабан 44 выполнен в виде ко- нической шестерни 59, в зацеплении с которой находится дополнительная коническая шестерня 60, через фрикционный механизм 61 кииематически соединенная с ходовым винтом 62 и ходовым винтом 63. Ходовой винт 62 имеет правую нарезку винтовой дорожки и через ходовую гайку 64, жестко закрепленную на изоляционной колодке 34,связан с токопроводящими штангами.
10
2025
Ходовой винт 63 имеет левую нарезку винтовой дорожки и связан с балансным грузом 4 посредством жестко закрепленной на нем ходовой гайки 65. Для поддержки винтов 62 и 63 штанга 3 снабжена стойками 66.
В данном варианте исполнения кинематическая связь определяется из условия:
А1 . тг А2 т
где А: - величина шага ходового винта, связанного с токопроводяшими штангами и моделью вертолета; А2 - величина шага ходового винта, связанного с противовесом; /П: - масса подрижной системы модели вертолета и токопроводящих штанг;
/П2 - масса балансного груза. Другой вариант выполнения кинематической связи изображен на фиг. 8.
На штанге 3 на вертикальных осях с возможностью свободного врашения установлены два дополнительных шкива одинакового диаметра 67 и 68; шкив 67 со стороны модели вертолета 5, шкив 68 - со стороны балансного груза 4. Шкив 46 и вспомогательный шкив 67 связаны посредством гибкого тросика 69, концы которого соединены между собой пружиной натяжения 70.
Тросик 69 уложен на шкив 46 с образо5
0
5
0
5
ванием петяи и прикреплен к изоляционной колодке 34 токопроводящих штанг 30.
Шкив 47 и вспомогательный шкив 68 связаны посредством гибкого тросика 71, концы которого соединены между собой пружиной натяжения 72, тросик 71 также уложен на шкив 47 с образованием петли. Гибкий тросик 71 жестко прикреплен к балансному грузу 4.
Кинематическая связь между моделью вертолета и противовесом в данном случае определяется зависимостью:
.Dj..,m2 DI т
где/ -диаметр шкива, связанного с токопроводящими штангами и моделью вертолета;
DZ - диаметр шкива, связанного с противовесом;
т - масса подвижной системы токопроводящих штанг и модели вертолета; т2 - масса балансного груза. На модели вертолета 5 имеется захват 79. предназначенный для транспортирования груза (объектов) 74.
В корпусе пульта дистанционного управления 6 встроен блок электропитания (не указан), состоящий или из устройства питания от электросети или из комплекта гальванических элементов.
15
20
Игрушка работает следующим образом (работа рассматривается на примере выполнения кинематической связи согласно п. 2 формулы изобретения (фиг. 5).
В исходном положении игрушка стоит основанием 1 и пультом дистанционного управления 6 на столе или полу. Модель вертолета 5 размещается, опираясь на шасси, на горизонтальной плоскости стола или пола. При этом момент, действующий на штангу 3 со стороны модели вертолета 5, 0 несколько больше момента, действующего со стороны балансного груза 4, но разность этих моментов меньше момента, создаваемого силой тяги воздушного винта 18 модели вертолета 5.
Поэтому при подаче регулируемого напряжения на электродвигатель 28 привода воздушного винта 18 ручкой 17 управления оборотами воздушного винта 18, через токо- проводящие пружины 25, токосъемные кольца 26, проводники 37, ламели 29, токопро- водящие штанги 30, токопроводящие пластины 31, создается тяга, модель вертолета 5 взлетает над плоскостью стола или пола. Высота подъема модели вертолета 5 ограничена возможным углом поворота штанги 3 в вертикальной плоскости и составляет 45- 60°.
Движение модели вертолета 5 по кругу юкруг стойки 2 возникает, когда ручкой 15 управления полетом через горизонтальную тягу 15, рычаг 13, вертикальную тягу 11 поворачивается качающаяся вилка 10 на оси 9. Поворот качающейся вилки 10 через штангу 3 вызывает отклонение оси воздушного винта 18 от вертикального положения. При этой сила тяги воздушного винта 8 раскладывается на вертикальную и горизонтальную составляющие, вследствие чего вертикальная составляющая поддерживает модель вертолета 5 в воздухе, а горизонтальная составляющая вызывает движение модели вертолета 5 по кругу вокруг стойки 2.
В зависимости от направления, в котором отклоняется ось воздушного винта 18, модель вертолета 5 движется по кругу то в одном, то в противополох ном направлении.
При подаче напряжения прямой или обратной полярности ручкой 19 управления радиусом полета модели вертолета 5 через токопроводящие пружины 25, токосъемные кольца 26, проводники 32 на электродвигатель 33 управления, начинает вращаться выходной вал 45 редуктора 43. Пружина 50
30
35
40
ге 3 и, тем самым, изменяя радиус полета модели вертолета 5. Токопроводящие штанги 30 движутся по свободно вращающимся на осях 35 направляющим роликам 36, а балансный груз 4 - по направляющим 39.
При этом сохраняется первоначальная регулировка баланса между моделью вертолета 5 и балансным грузом 4.
В соответствии со схемой, изображенной на фиг. 4, первоначальное условие баланса
Л1., 2 или /1 mi /2-.2;
(тем, что All несколько больше М2, согласно описанию работы игрушки, можно пренебречь) .
Изменение моментов при изменении радиуса полета модели вертолета 5 следующее:
-mi; ЛЛ 2 Д/2-яг2;
Из условия сохранения баланса:
ДМ,ДМ2; Д/i mi A/2-m2 или
А/1 - trij
А/2 ГГЦ
в случае формулы)
описываемого варианта (п. 2
,T-Oi; -я-02,
где п - число оборотов барабана 44;
,14...; т -масса модели вертолета 5 с токопроводящими штангами; т2-масса балансного груза 4. Следовательно, условие сохранения баланса в данном случае примет вид:
л-D т.п -л- D 2-m-2 D m - Dz-т-2;
и±. D
.tn-i mi
(О
Т. е., зная массу модели вертолета 5 с токопроводящими штангами 30 и массу балансного груза 4, можно подобрать диапрокладку 49 к фланцу 48 в результате чего барабан 44 также начинает вращаться. При вращении барабана 44 гибкая тяга 52 наматывается (сматывается) на (со) шкив 47 малого диаметра D2, перемещая балансный груз 4, а гибкая тяга 51 наматывается (сматывается) на (со) шкив 46 большого диаметра, перемешая токопроводящие штанги 30 с моделью вертолета 5 по штанподжимает барабан 44 через фрикционную п D большего шкива 46 и диаметр D
малого шкива 47 барабана 44, удовлетворяющие условию (1) сохранения баланса при изменении радиуса полета модели вертолета 5.
55 Пружины 42 и 37 обеспечивают возвратно-поступательное движение балансного груза 4 и модели вертолета 5 в исходное положение.
ге 3 и, тем самым, изменяя радиус полета модели вертолета 5. Токопроводящие штанги 30 движутся по свободно вращающимся на осях 35 направляющим роликам 36, а балансный груз 4 - по направляющим 39.
При этом сохраняется первоначальная регулировка баланса между моделью вертолета 5 и балансным грузом 4.
В соответствии со схемой, изображенной на фиг. 4, первоначальное условие баланса
Л1., 2 или /1 mi /2-.2;
(тем, что All несколько больше М2, согласно описанию работы игрушки, можно пренебречь) .
Изменение моментов при изменении радиуса полета модели вертолета 5 следующее:
-mi; ЛЛ 2 Д/2-яг2;
Из условия сохранения баланса:
ДМ,ДМ2; Д/i mi A/2-m2 или
А/1 - trij
А/2 ГГЦ
30
в случае формулы)
описываемого варианта (п. 2
,T-Oi; -я-02,
35
40
где п - число оборотов барабана 44;
,14...; т -масса модели вертолета 5 с токопроводящими штангами; т2-масса балансного груза 4. Следовательно, условие сохранения баланса в данном случае примет вид:
л-D т.п -л- D 2-m-2 D m - Dz-т-2;
(О
Т. е., зная массу модели вертолета 5 с токопроводящими штангами 30 и массу балансного груза 4, можно подобрать диа D большего шкива 46 и диаметр D
55 Пружины 42 и 37 обеспечивают возвратно-поступательное движение балансного груза 4 и модели вертолета 5 в исходное положение.
14
При выполнении кинематической связи между моделью вертолета 5 и балансным грузом 4 в соответствии с п. 3 формулы изобретения (фиг. 6) изменение радиуса полета модели вертолета 5 происходит следующим образом. Барабан 44 начинает вращать- ся, вращаются щестерни 53 и 54, которые перемещают зубчатые рейки 55 и 56 соответственно.
Зубчатая рейка 55 тянет изоляционную колодку 34 и связанные с ней токопро- водящие щтанги 30 с моделью вертолета 5. Рейка 56 тянет балансный груз 4.
При выполнении кинематической связи между моделью вертолета 5 и балансным грузом 4 в соответствии с п. 4 формулы изобретения изменение радиуса полета модели вертолета 5 происходит следующим образом (фиг. 7).
При подаче напряжения ручкой 19 управления радиусом полета приходит во враще- ние выходной вал 45 редуктора 43 и начинает вращаться коническая шестерня 59 и находящаяся с ним в зацеплении щестерня 60. Через фрикционный механизм 61 приводятся в движение ходовые винты 62 и 63, которые, в свою очередь, перемещают по щтанге 3 токопроводящие щтанги 30 с моделью вертолета 5 и балансный груз 4.
При выполнении кинематической связи между моделью вертолета 5 и балансным грузом 4 в соответствии с п. 2 формулы изобретения (фиг. 8) изменение радиуса полета модели вертолета 5 происходит следующим образом
Барабан 44 начинает вращаться от выходного вала 45 редуктора 43. При этом щкив 46 через вспомогательный щкив 67 перематывает гибкий тросик 69, перемещая модель вертолета 5 с токопроводящими щтангами 30, а шкив 47 через вспомогательный шкив 68 перематывает гибкий тросик 71, перемещая балансный груз 4.
Ч
AL
V
Р5
0с
0
0
0
5 о
8 Формула изобретения
СП
-УЛН
м
В-Е
Фие.2
/
J
Л l
Фие.5
,
iS.
fut.S
r
2
1
| Игрушка "управляемая модель самолета на жесткой штанге | 1985 |
|
SU1287904A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
