Изобретение относится к силоизмери- тельной технике и может быть использовано для измерения знакопеременных сил малого номинала с высокой точностью.
Известен тензодатчик силы, в котором упругий элемент выполнен в форме кольца с двумя диаметральными, ортогонально расположенными перемычками, на которых размещены тензорезисторы. При приложении к кольцу силы вследствие его деформа- ции одна из перемычек сжимается, а другая растягивается, что позволяет реализовать схему полного электрического моста. При измерении малых сил требуется высокая податливость всех частей упругого элемента, что неизбежно приводит к потере устойчивости сжимаемой перемычки, а также к большим прогибам кольца и, как следствие, к ухудшению качества датчика по критерию нелинейности. Конструкция не позволяет осуществить центральное приложение силы.
Известен тензорезисторный датчик силы (ТДС) в котором упругий элемент в форме
крестовины с жестким центром зажат по С/) концам балок между двумя кольцами, а тен- f зорезисторы размещаются на верхней и л нижней полках. Для реализации полного электрического моста необходимо, чтобы активные тензорезисторы попарно испытывали деформацию противоположных знаков. Поэтому в указанной, конструкции vl должны использоваться только деформа- Ю ции, обусловленные изгибом балочек. При СО измерении малых сил балочки должны быть 1ч. тонкими , и их прогибы большими. В этом Q случае защемление концов балочек обусло- Q вит мембранный эффект, т.е. приращение деформаций одного знака на каждом тензо- резисторе, что противоречит вышеуказанным требованиям. Незащемление концов балок приведет к их перемещению, что обусловит повышение гистерезиса и изменение плеча изгибающих сил, что приведет к повышению нелинейности.
Целью изобретения является уменьшение нелинейности.
Поставленная цель достигается тем, что в датчик силы введены дополнительный упругий элемент, идентичный первому, и втулка, посредством которой связаны между собой внутренние кольца упругих элементов, при этом радиальные перемычки обоих упругих элементов выполнены со встречным углом наклона к центральной оси датчика.
Новым в предлагаемой конструкции датчика силы является предварительное растяжение упругих элементов, закрепленных на кольцевой раме, путем их осевого поджатия к торцам дистанционной втулки, длина которой меньше начального расстояния между упругими элементами, а также последовательное соединение в плечах электрического моста двух тензорезисторов, располагаемых на одинаково ориентированных радиальных перемычках упругого элемента.
При этом упругие элементы могут иметь форму полос, кольцевой сплошной мембраны или кольцевой перфорированной мембраны с четырьмя ортогонально ориентированными радиальными перемычками, на которых размещено по одному тен- зорезистору и два тензорезистора на одинаково ориентированных перемычках каждого упругого элемента включены последовательно в плечо моста электрической измерительной схемы.
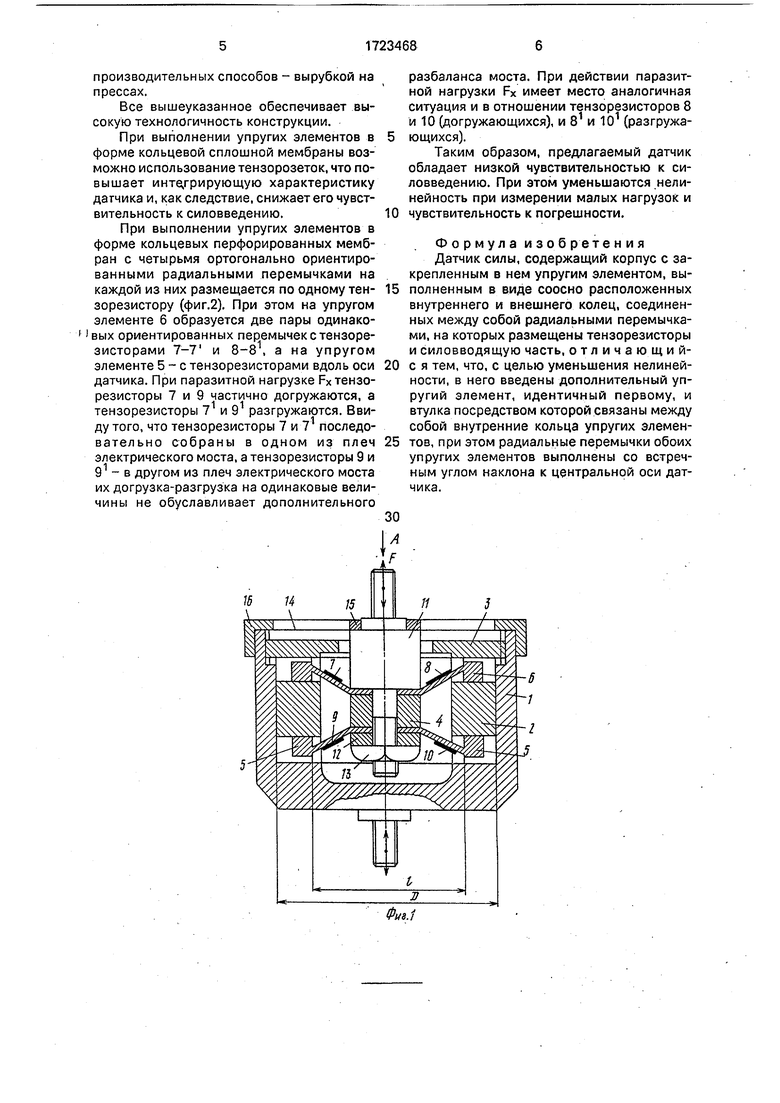
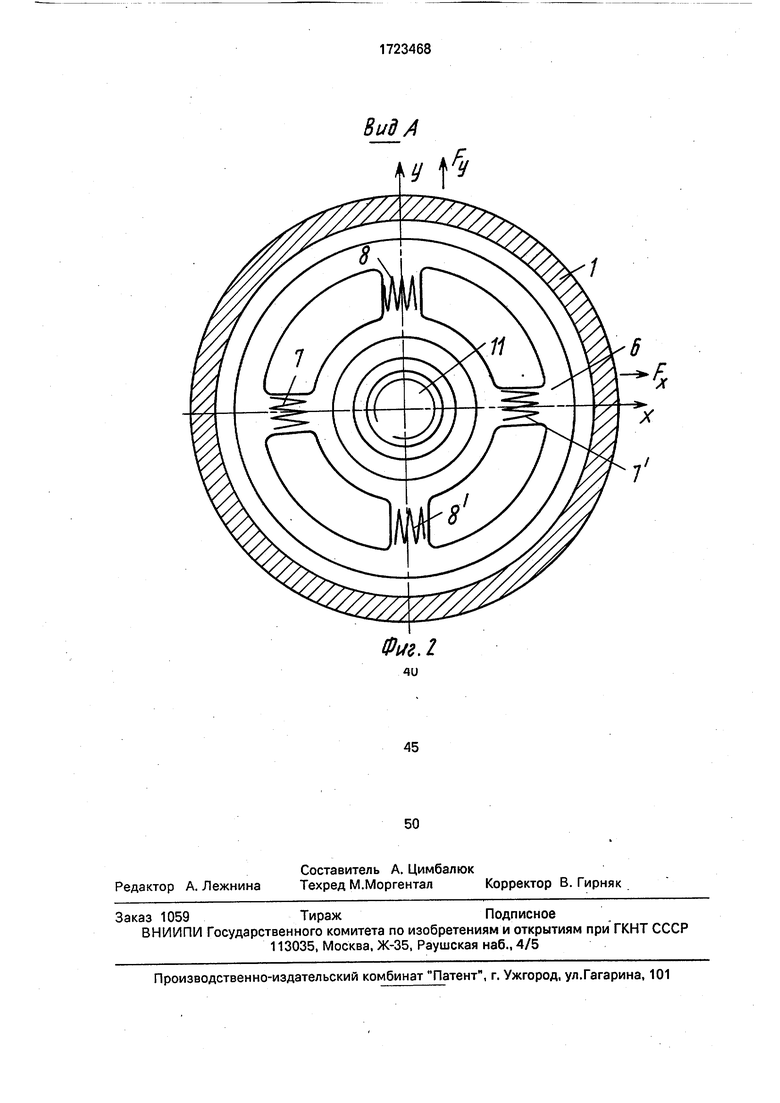
На фиг.1 изображена конструкция предлагаемого датчика; на фиг.2 - вид А на фиг.1.
В предлагаемом датчике упругие элементы выполнены в форме кольцевых перфорированных мембран с четырьмя ортогонально ориентированными радиальными перемычками, на каждой из которых размещается по одному тензорезистору (фиг.2).
Датчик (фиг.1) включает корпус 1, кольцевую рамку 2, гайку 3, дистанционную втулку 4, упругие элементы 5 и 6, тензорези- сторы 7 и 8, 9 и 10, силовводящую часть 11, шайбу 12, гайку 13, мембрану 14 и уплотни- тельные кольца 15 и 16.
Датчик собирается и работает следующим образом.
Упругие элементы 5 и 6 своими массивными частями сопрягаются с лысками на кольцевой рамке по размеру I с проставкой между ними дистанционной втулки 4. В ненапряженном состоянии между податливыми частями упругих элементов расстояние по оси датчика больше, чем длина дистанционной втулки 4 (в).
Силовводящая часть 11 центрирует по диаметру d втулку 4 и упругие элементы 5 и
6. С помощью гайки 13 через шайбу 12 производят полную выборку осевых зазоров между центральными частями упругих элементов 5 и 6 и втулкой 4 с предварительной
затяжкой соединения усилием Р3ам FH, где FH - номинальное значение измеряемой знакопеременной силы. В результате этой операции горизонтальные вначале податливые участки упругих элементов 5 и 6 становятся наклонными и ввиду ограничений радиальных перемещений к центру на размере I испытывают деформацию натяжения. Если тензорезисторы 7,8,9 и 10 размещены на упругих элементах до их затяжки, то они
также находятся в статически растянутом состоянии в ненагруженном датчике. Если же они размещаются на упругих элементах после их затяжки, то тензорезисторы находятся в недеформированном состоянии в
ненагруженном датчике. Кольцевая рамка 2 сопрягается с корпусом 1 по диаметру D и фиксируется от осевых перемещений в нем с помощью гайки 3. От внешней среды рабочая полость датчика герметизируется мембраной 14, закрепляемой на силовводящей части кольцом 15 и на корпусе кольцом 16. При приложении к датчику сжимающего усилия F податливая часть упругого элемента 6 догружается, испытывая дополнительное растяжение, а упругого элемента 5 разгружается, что обуславливает ее сжатие.
Расположенные на податливых частях упругих элементов тензорезисторы 7 и 8
также растягиваются, а 9 и 10 сжимаются, что дает возможность реализовать схему полного электрического моста. При этом все упругие элементы работают в устойчиво- равновесном состоянии, так как их податливые части всегда растянуты. Поскольку упругие элементы работают так, что догрузка одного обуславливает такую же разгрузку другого, все приращения систематических погрешностей взаимокомпенсиругатся ввиду их разных знаков. Все это обуславливает повышение точности измерений.
Все основные детали датчика выполнены в форме тел вращения, что дает возможность изготовить их на любом виде
обрабатывающего оборудования с минимальными трудозатратами при высокой точности. Тензорезисторы размещены на плоских податливых частях упругих элементов, что обеспечивает высокое качество соединения и позволяет механизировать или автоматизировать процесс наклейки тензорезисторов.
Изготовление упругих элементов возможно из стандартных заготовок (например, пружинной ленты) одним из наиболее
производительных способов - вырубкой на прессах.
Все вышеуказанное обеспечивает высокую технологичность конструкции.
При выполнении упругих элементов в форме кольцевой сплошной мембраны возможно использование тензорозеток, что повышает интегрирующую характеристику датчика и, как следствие, снижает его чувствительность к силовведению.
При выполнении упругих элементов в форме кольцевых перфорированных мембран с четырьмя ортогонально ориентированными радиальными перемычками на каждой из них размещается по одному тен- зорезистору (фиг.2). При этом на упругом элементе 6 образуется две пары одинако- вых ориентированных перемычек с тензоре- зисторами 7-7 и 8-81, а на упругом элементе 5 - с тензорезисторами вдоль оси датчика. При паразитной нагрузке Рхтензо- резисторы 7 и 9 частично догружаются, а тензорезисторы 71 и 91 разгружаются. Ввиду того, что тензорезисторы 7 и 7 последо- вательно собраны в одном из плеч электрического моста, а тензорезисторы 9 и 91 - в другом из плеч электрического моста их догрузка-разгрузка на одинаковые величины не обуславливает дополнительного
0
разбаланса моста. При действии паразитной нагрузки FX имеет место аналогичная ситуация и в отношении тензорезисторов 8 и 10 (догружающихся), и 81 и 101 (разгружающихся).
Таким образом, предлагаемый датчик обладает низкой чувствительностью к силовведению. При этом уменьшаются нелинейность при измерении малых нагрузок и чувствительность к погрешности.
Формула изобретения Датчик силы, содержащий корпус с закрепленным в нем упругим элементом, выполненным в виде соосно расположенных внутреннего и внешнего колец, соединенных между собой радиальными перемычками, на которых размещены тензорезисторы и силовводящую часть, отличающийс я тем, что, с целью уменьшения нелинейности, в него введены дополнительный упругий элемент, идентичный первому, и втулка посредством которой связаны между собой внутренние кольца упругих элементов, при этом радиальные перемычки обоих упругих элементов выполнены со встречным углом наклона к центральной оси датчика.
Вид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензорезисторный датчик силы | 1990 |
|
SU1742650A1 |
| Тензорезисторный датчик силы | 1990 |
|
SU1742649A1 |
| Силоизмерительный тензодатчик | 1990 |
|
SU1760393A1 |
| Силоизмерительное устройство | 1990 |
|
SU1747960A1 |
| Тензорезисторный датчик силы | 1990 |
|
SU1760392A1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1352256A1 |
| Тензорезисторный датчик силы | 1989 |
|
SU1684605A1 |
| Тензорезисторный датчик силы | 1989 |
|
SU1631319A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК РАСТЯЖЕНИЯ | 1991 |
|
RU2017095C1 |
| Датчик силы | 1989 |
|
SU1742647A1 |
Изобретение относится к силоизмери- тельной технике и может быть использовано для измерения знакопеременных сил малого номинала с высокой точностью. Целью изобретения является уменьшение нелинейности датчика. Для достижения цели в универсальном датчике силы, содержащем корпус, силовводящую часть и два упругих элемента, на радиальных перемычках которых размещены тензорезисторы, радиальные перемычки упругих элементов выполнены со встречным наклоном к центральной оси.2 ил.
| СПОСОБ ФОРМИРОВАНИЯ ПАРАМЕТРИЧЕСКОЙ АНТЕННЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2550588C1 |
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Патент США iSh 3303452, кл | |||
| Чемодан с сигнальным замком | 1922 |
|
SU338A1 |
