Изобретение относится к магнитным измерениям, в частности измерениям геомагнитного поля преимущественно с борта самолета или вертолета.
Цель изобретения - повышение точности измерений.
На фиг. 1 показана блок-схема для осуществления способа; на фиг. 2 а, б представлен вариант выполнения одного из блоков схемы - формирователя временного интервала и временная диаграмма его работы; на фиг. 3 - вариант выполнения другого блока схемы - периодомера; на фиг. 4 - вариант выполнения датчика положения лопасти.
Для осуществления способа выполняют следующие операции: преобразуют угловое положение несущего винта в электрический сигнал, период которого кратен периоду полного оборота несущего винта; синхронизируют этим сигналом цикл измерения; измеряют значения индукции при номинальных оборотах двигателя вертолета; запоминают серию результатов измерений; определяют разброс результатов в заполненной серии; изменяют длительность времени измерения магнитометра, проводя операции 3-5 при каждом новом значении времени измерения, выбирают такое значение длительности, которому соответствует минимальный разброс результатов измерений; измеряют индукцию при выбранной длительности времени измерения.
Способ заключается в следующем.
Магнитометр с датчиком, жестко прикpепленным к фюзеляжу вертолета, поднимают в воздух и при номинальных оборотах двигателя в зависшем состоянии измеряют индукцию, причем запуск цикла измерения осуществляют с помощью датчика положения лопасти, например управляемого контакта, который вырабатывает запускающий импульс в момент прохождения над ним одной из пяти лопастей несущего винта вертолета. Импульс, создаваемый при кратковременном замыкании контакта, запускает измерительную схему, которая в течение заданного интервала времени измеряет период сигнала процессии Тпр магнитометра и вычисляет значение индукции по формуле Вi = = γ /Tпр, где γ - коэффициент пропорциональности, связывающий значения измеряемой индукции и частоты прецессии (для протонного магнитометра, например, γ = 23,4874 нТл/Гц).
В результате синхронизации начало и конец интервала измерения совпадают с определенными и всегда одинаковыми фазами периода полного оборота несущего винта. В этом случае практически исключается влияние первой гармоники спектра периодических помех, создаваемых намагниченными деталями винтомоторного узла вертолета. Однако спектр периодических помех содержит ряд составляющих, периоды которых меньше периода полного оборота несущего винта и не кратны ему. Наличие этих составляющих связано с вращением системы зубчатых передач, приводящих в движение оба винта вертолета, и вращением лопастей хвостового винта.
Для устранения влияния наиболее сильной из этих помех контролируют разброс результатов производимых магнитометром измерений индукции в точке зависания вертолета. Для этого вместе с вычислением индукции определяют, например, текущее значение среднего квадратического отклонения серии из К измерений σв согласно выражению
σв=  вычисляют значение четвертой разности текущих пяти измерений согласно выражению Δ4 = Вi - 4Bi-1 + 6Bi-2 + 4Bi-3 + Bi-n, где Bi - значение индукции, полученное в текущем цикле измерения, Bср=
вычисляют значение четвертой разности текущих пяти измерений согласно выражению Δ4 = Вi - 4Bi-1 + 6Bi-2 + 4Bi-3 + Bi-n, где Bi - значение индукции, полученное в текущем цикле измерения, Bср=  Контролируя значение σв или Δ4, изменяют длительность времени измерения периода прецессии магнитометра и выбирают такое ее значение, при котором σв или Δ4 минимальны. При этом выбирается такая продолжительность интервала измерения, которая совпадает с длительностью наиболее сильно мешающей гармоники помехи. Тем самым устраняется влияние двух наиболее активных составляющих спектра периодических помех, первой гармоники и наиболее сильной некратной по длительности периода высшей гармоники. Этого оказывается достаточно для практически полного устранения влияния периодических помех, так как воздействие более высокочастотных гармоник помех обратно пропорционально их частоте и поэтому не оказывает влияния на погрешность измерения.
Контролируя значение σв или Δ4, изменяют длительность времени измерения периода прецессии магнитометра и выбирают такое ее значение, при котором σв или Δ4 минимальны. При этом выбирается такая продолжительность интервала измерения, которая совпадает с длительностью наиболее сильно мешающей гармоники помехи. Тем самым устраняется влияние двух наиболее активных составляющих спектра периодических помех, первой гармоники и наиболее сильной некратной по длительности периода высшей гармоники. Этого оказывается достаточно для практически полного устранения влияния периодических помех, так как воздействие более высокочастотных гармоник помех обратно пропорционально их частоте и поэтому не оказывает влияния на погрешность измерения.
Вариант устройства, осуществляющего способ, представлен на фиг. 1. Оно содержит датчик 1 положения лопасти, магниточувствительный блок 2, формирователь 3 временного интервала, периодомер 4, вычислитель 5, опорный генератор 6, устройство 7 ввода информации, индикаторное устройство 8.
По запускающему сигналу от датчика 1 формирователь 3 вырабатывает сигнал, синхронизированный с сигналом прецессии, поступающим от магниточувствительного блока 2, и с сигналом опорного генератора 6, разрешающий работу периодомера 4, подсчитывающего число ni импульсов прецессии, число Ni импульсов опорного генератора за определенный интервал времени измерения, длительность которого определяется формирователем 3 и регулируется с помощью устройства 7 ввода информации. Необходимое значение длительности времени измерения набирается на переключателях устройства 7 ввода, с которых информация по шине обмена попадает в вычислитель 5. Вычислитель программирует формирователь 3, изменяя коэффициент пересчета его счетчика.
По окончании времени измерения сигнал от формирователя, синхронизированный с сигналом прецессии и сигналом эталонной частоты, запрещает работу периодомера. При этом на выходах периодомера содержится код числа импульсов, подсчитанного периодомером. Этот код считывается по шине обмена вычислителем 5, который подсчитывает значение индукции Вi и заносит его в ОЗУ. Вычислитель 5 также подсчитывает значение СКО σв или четвертой разности Δ4, извлекая из ОЗУ результаты предыдущих k-1 измерений. Таким образом, с каждым новым измерением серия хранящихся в памяти резльтатов обновляется на один результат. Вычисленное значение σв (Δ4) по шине обмена информацией поступает в индикаторное устройство 8 для визуального контроля.
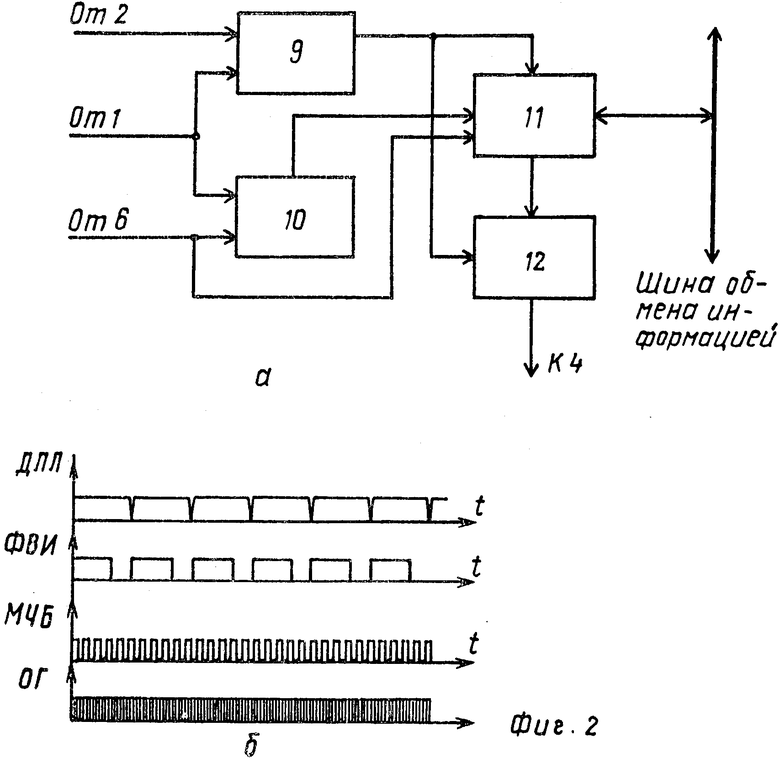
На фиг. 2, а представлен вариант исполнения формирователя временного интервала, содержащего две схемы синхронизации 9 и 10, программируемый счетчик 11 и RS-триггер 12. При поступлении импульса запуска от датчика схемы синхронизации приводятся в состояние готовности, при котором каждой из них формируется разрешающий потенциал в момент прихода ближайшего рабочего фронта соответствующего сигнала. Эти разрешающие потенциалы поступают на входы разрешения программируемого счетчика, а на его тактовый вход - сигнал от опорного генератора. Сигнал с выхода первой схемы синхронизации 9 взводит RS-триггер 12. По окончании счета на выходе счетчика 11 появляется сигнал переполнения, сбрасывающий RS-триггер. Таким образом на выходе RS-триггера формируется импульс, длительность которого определяется коэффициентом пересчета счетчика 11, который устанавливается в результате программирования счетчика по шине обмена информацией.
На временной диаграмме фиг. 2б приведены сигналы запуска от датчика 1 выходного сигнала RS-триггера (ФВИ), импульсов сигналов прецессии (МЧБ) и опорного генератора (ОГ).
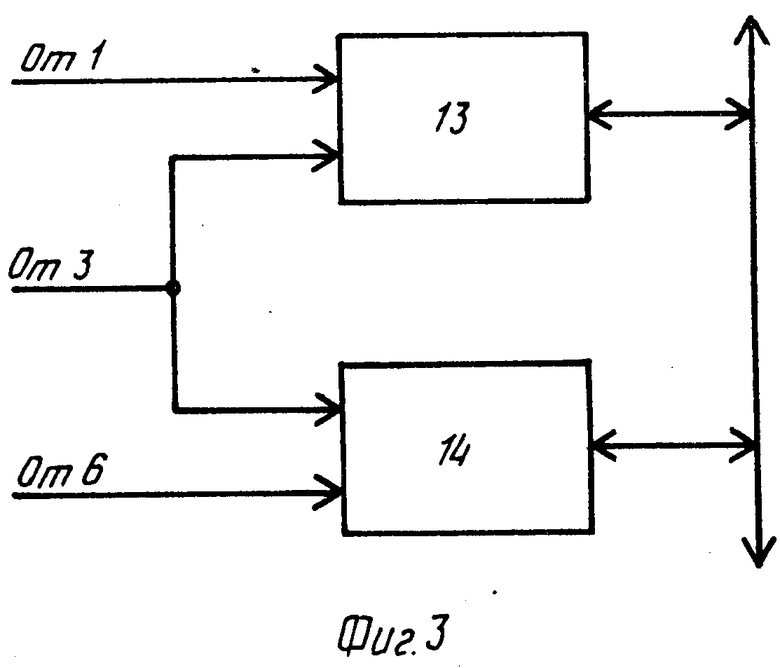
На фиг. 3 показан вариант выполнения пеиодомера. Он состоит из двух программируемых таймеров, работающих в режиме счетчиков импульсов. Первый таймер 13 подсчитывает число импульсов прецессии, а второй таймер 14 - число импульсов опорного генератора, прошедших на вход таймеров за время измерения, определяемое сигналом разрешения, который вырабатывается формирователем временного интервала. Состояния счетчиков таймеров считываются после их остановки вычислителем по шине обмена информацией.
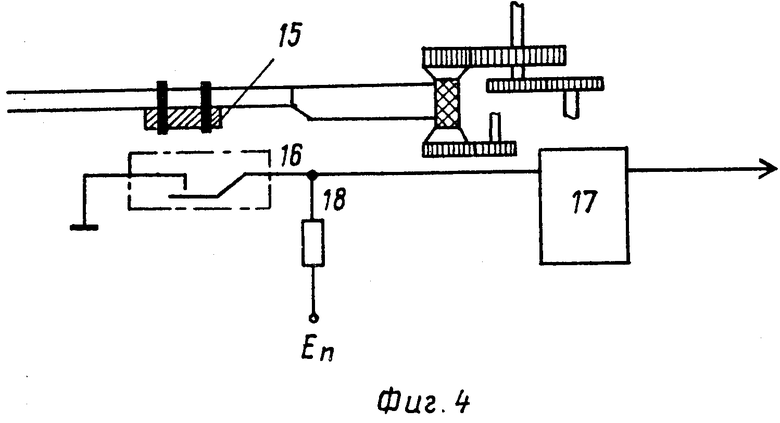
На фиг. 4 приведен вариант схемы формирования запускающего импульса с помощью датчика 1. Датчик положения лопастей состоит из подвижого магнита 15 (ферромагнитный диск), прикрепленного к вращающейся лопасти, и неподвижного магнитоуправляемого контакта геркона 16. В положении винта, когда магнит 15 удален от геркона 16, контакт геркона разомкнут. При этом на вход формирователя 17 поступает положительный потенциал от источника Еп через резистор 18. В момент прохождения лопасти с магнитом над герконом его контакт замыкается, и на выходе формирователя 17 появляется отрицательный перепад напряжения, вызывающий срабатывание формирователя, который вырабатывает запускающий импульс необходимой формы и длительности. (56) Авторское свидетельство СССР N 1109700, кл. G 01 V 3/165, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ исключения девиации показаний магнитометра при вертолетной геомагнитной съемке | 1983 |
|
SU1109699A1 |
| Магнитометр | 1989 |
|
SU1622866A1 |
| Магнитометр | 1984 |
|
SU1245108A1 |
| Прямоотсчетный протонный магнитометр | 1983 |
|
SU1124239A1 |
| Протонный магнитометр | 1982 |
|
SU1097066A1 |
| Протонный цифровой магнитометр | 1984 |
|
SU1213456A1 |
| Способ измерения магнитной индукции протонным магнитометром | 1988 |
|
SU1688213A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| Способ синхронизации момента включения поляризующего поля протонного магнитометра | 1985 |
|
SU1393104A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
Изобретение относится к магнитным измерениям и может быть использовано для измерений геомагнитного поля преимущественно с борта самолета или вертолета. Цель изобретения - повышение точности измерений. Эта цель достигается осуществлением серии измерений при номинальных оборотах вращения датчика, изменением длительности времени измерения и по минимальному разбросу показаний магнитометра в серии при различном времени измерений и выбранной длительности времени измерения измеряют в этом интервале индукцию геомагнитного поля в условиях воздействия периодических магнитных помех. Кроме того, в начале способа осуществляют преобразование углового положения вращающегося датчика в сигнал, период которого кратен периоду полного оборота датчика и синхронизируют цикл измерения магнитометра этим сигналом. 4 ил.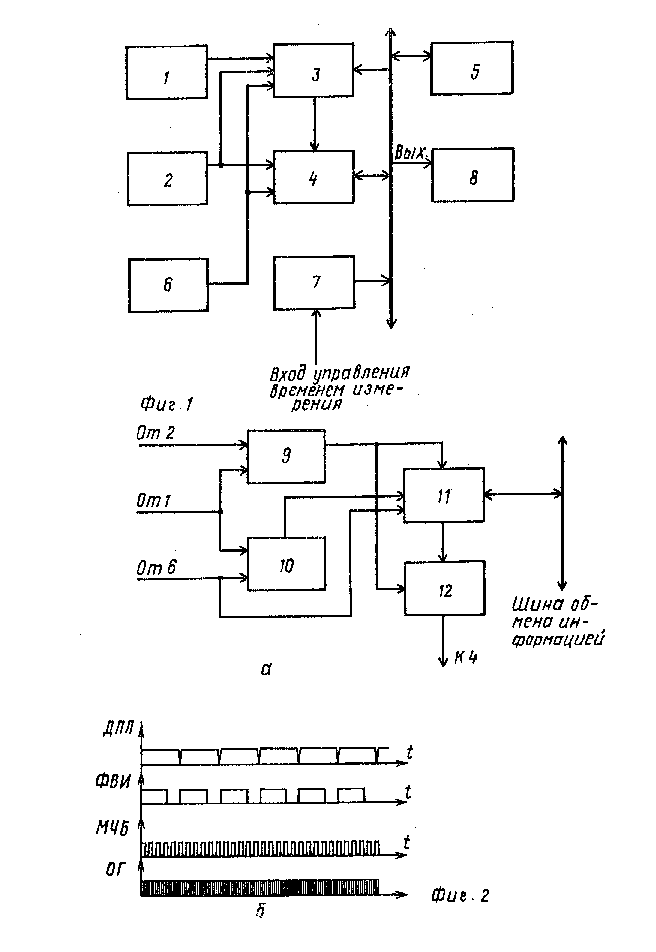
СПОСОБ ИЗМЕРЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ в условиях воздействия периодических магнитных помех, включающий преобразование углового положения вращающего датчика в сигнал, период которого кратен периоду полного оборота датчика, и синхронизацию цикла измерения магнитометра этим сигналом, отличающийся тем, что, с целью повышения точности измерения, дополнительно производят серию измерений при номинальных оборотах вращения датчика, изменяют длительность времени измерения до получения минимального разброса показаний магнитометра в серии, устанавливают длительность времени измерений, соответствующую минимальному разбросу, производят измерения при установленной длительности.
