J
Изобретение относится к геофизи-ке, в частности к устройствам для измерения индукции геомагнитного по ля.
Цель изобретения - повьшение точности измерения величины магнитного поля.
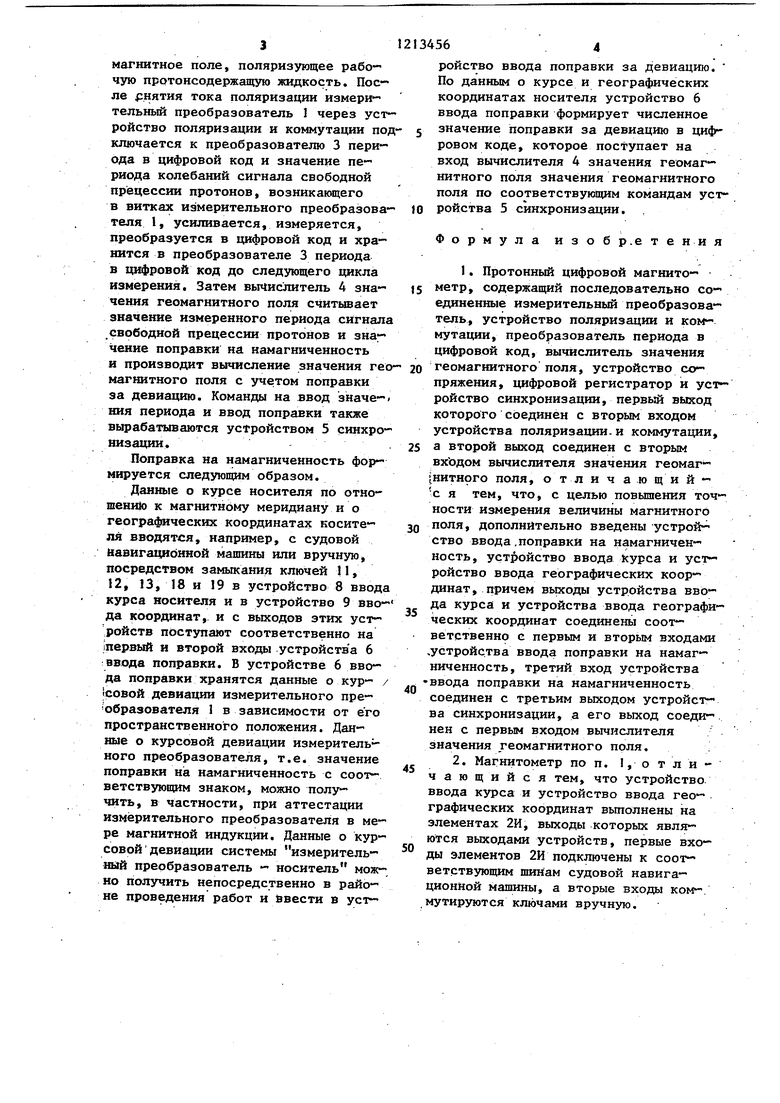
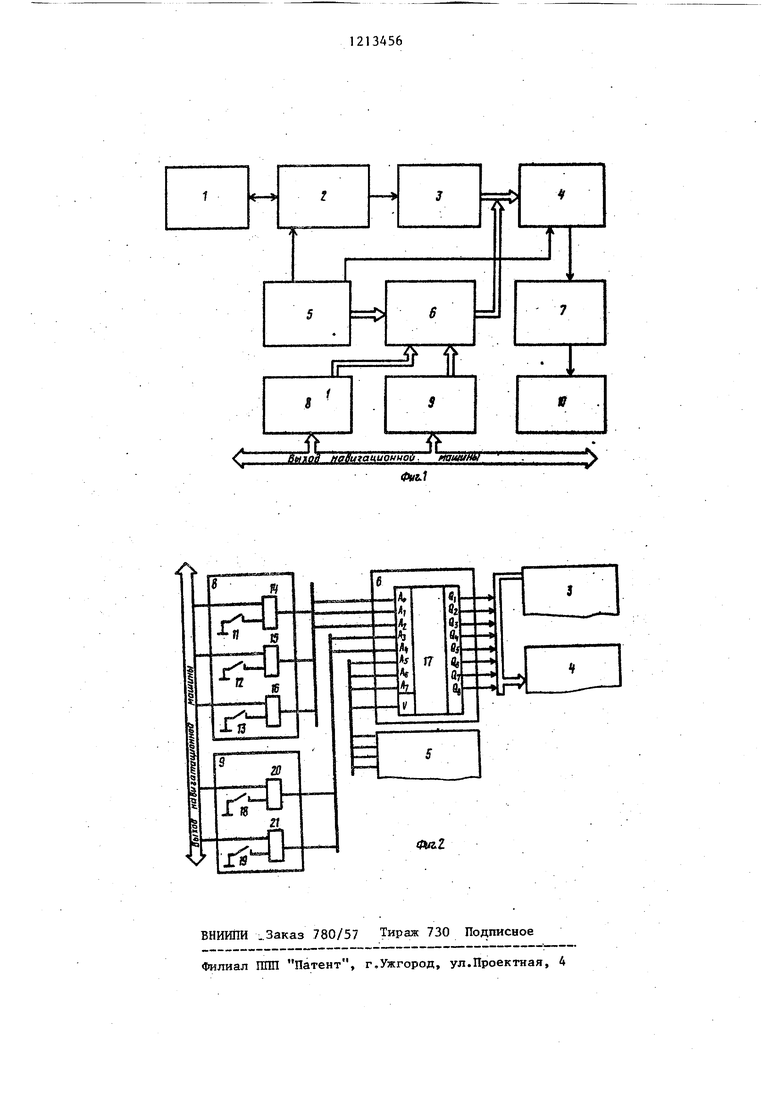
На фиг. 1 дана структурная схема магнитометра; на фиг. 2 - структур ная схема устройств вводов курса и координат.
Магнитометр содержит измерительный преобразователь 1, представляющий собой сосуд, заполненный про- тонсодержащей жидкостью, в которую помещен индукционный магниточувстви- тельный элемент, например, соленоид шш тороидальная катушка, устройство 2 поляризации и коммутации, выполненное на транзисторных ключах, либо электромагнитных реле, преобразователь 3 периода в цифровой код, содержащий усилитель-формирователь, счетчик импульсов, собственно измеритель длительности периода и выходной регистр, вычислитель 4 значения геомагнитного поля на микропроцессоре, устройство 5 синхронизации, устройство 6 ввода поправки на намагниченность, устройство 7 сопряжения с цифровым регистратором, устройство 8 ввода курса, устройство 9 ввода географических координат и цифровой регистратор 10,, измерительный преобразователь соединен с первым входом устройства 2 поляризации и коммутации, выход которого соединен с входом преобразователя J периода в цифровой код, выход преобразователя 3 периода в цифровой код, представляющий собой внутреннюю общз шину данных, соединен с.информационным входом вычислителя 4 значения геомагнитного поля, выход которого соединен с входом устройства 7 сопряжения, выход же устройства 7 сопряжения соединен с входом цифрового регистратора 10,
Первый выход устройства 5 синхронизации соединен с вторым входом устройства 2 поляризации и коммутации, второй выход устройства 5 синхрониза ,1;ии соединен с вторым служебным входом вычислителя 4 значения- геомагнитного поля. Третий выход устройства синхронизации подключен к третьему входу устройства 6 ввода поправки на намагниченность, выход устройства 8 ввода курса соединен с первым входом
34561
устройства 6 поправки, к второму вхо- ду которого подключен выход устройства 9 ввода географических коорди-- ват, а выход устройства 6 ввода по-
, правки соединен с первым (икформашг онным) входом вычислителя 4 значения геомагнитного поля. Входы устройства ввода курса и устройства ввода координат присоединены к выходу на-
0 вигациоиной мапганы.
Устройство 8 ввода курса (фиг.2) содержит ключи 11 - I3 и логические элементы.2И 14-16. Первые входы элементов 2И 14 - 16 подключены к соот-
. ветствующим выходам навигационной машины, вторые входы элементов 2И 14 - 16 посредством ключей 11-13 соответственно могут быть подключены к общему (земляному проводу
0 Выхрды элементов 14-16 служат выходом устройства 8 ввода курса и подключены к первым трем ад ресным входам устройства 6 ввода поправки, вьтолненного на базе пере-
5 программируемого запоминающего устройства (ПЗУ) 17с произвольной выборкой первых входов устройства 6 ввода поправки. Устройство 9 ввода координат состоит из ключей 18 и 19 и логических элементов 2И 20 и 21. Первые входы элементов 2И 20 и 21 подключены к соответствзтощим выходам навигационной машины, вторые входы элементов 20 и 21 посредством ключей 18 и 19 могут быть подключе-
5 ны к общему (земляному) проводу вручную. Выходы элемеитоы 2И 20 и 21 служат выходом устройства 9 ввода координат и подключены к последующим адресным входам устрой-
ства 6 ввода поправки (второй вход устройства 6 ввода поправки). Другие входы ПЗУ (третий вход устройства 6 ввода поправки) подключены к третье- ему выходу устройства 5 синхронизации. Выходы ПЗУ служат выходом устройства ввода поправки и подключены к первому /( информационному)) входу вычислителя 4 значения геомагнитного поля.
0. Магнитометр работает следующим образом.
По командам узла синхронизации 5 устройство 2 поляризации и коммутации подключает.измерительный преоб5 разователь 1 к источнику тока поляризации (не показан). Ток поляризации , проходя по,обмотке измерительного преобразователя I, создает
5
магнитное поле, поляризующее рабо- чую протонсодаржащую жидкость. После рнятия тока поляризации измери тельный преобразователь 1 через уст ройство поляризации и коммутации под ключается к преобразователю 3 периода в цифровой код и значение периода колебаний сигнала свободной прецессии протонов, возникающего в витках измерительного преобразователя 1, усиливается, измеряется, преобразуется в цифровой код и хранится в преобразователе 3 периода в цифровой код до следующего цикла измерения. Затем вычислитель 4 значения геомагнитного поля считывает значение измеренного периода сигнала ,свободной прецессии протонов и значение поправки на намагниченность и производит вычисление значения геомагнитного поля с учетом поправки за девиацию. Команды на ввод значе- ния периода и ввод поправки также вырабатываются устройством 5 синхронизации.
Поправка на намагниченность формируется следующим образом.
Данные о курсе носителя по отношений к магнитному меридиану и о географических координатах носителя вводятся, например, с судовой Иавигациоиной машины или вручную, посредством замыкания ключей 11, 12, 13, 18 и 19 в устройство 8 ввода курса носителя и в устройство 9 ввода координат, и с выходов этих устройств поступают соответственно на первый и второй входы устройств а 6 :ввода поправки. В устройстве 6 ввода поправки хранятся данные о кур- 1СОВОЙ девиации измерительного пре- образователя 1 в зависимости от его пространственного положения. Данные о курсовой девиации измерительного преобразователя, т.е. значение поправки на намагниченность с соответствующим знаком, можно полу- шть, в частности, при аттестации измерительного преобразователя в мере магнитной индукции. Данные о курсовой девиации системы измерительный преобразователь - носитель можно получить непосредственно в районе проведения работ и Ввести в уст-
-
12134564
ройство ввода поправки за девиацию. По данным о курсе и географических координатах носителя устройство 6 ввода поправки формирует численное значение поправки за девиацию в циф ровом коде, которое поступает на вход вычислителя 4 значения геомагнитного поля значения геомагнитного поля по соответствукацим командам устройства 5 синхронизации.
(О
5
0
5
0
5
0
5
Формула изоб р.е т е ни я
1. Протонный цифровой магнитометр , содержащий последовательно соединенные измерительный преобразователь, устройство поляризации и коммутации, преобразователь периода в цифровой код, вычислитель значения геомагнитного поля, устройство сопряжения, цифровой регистратор и устройство синхронизации, первьй выход которого соединен с вторым входом устройства поляризации.и коммутации, а второй выход соединен с вторым вхЪдом вычислителя значения геомаг- (нитиого поля, о т л и ч а ю щ и и - С я тем, что, с целью повышения точности измерения величины магнитного поля, дополнительно введены устройство ввода.поправки на намагниченность, устройство ввода kypca и устройство ввода географических координат, причем вьрсоды устройства ввода курса и устройства ввода географических координат соединены соответственно с первым и вторым входами .устройства ввода поправки на намагниченность, третий вход устройства ввода поправки на намагниченность соединен с третьим выходом устройства синхронизации, а его выход соединен с первым входом вычислителя значения геомагнитного поля.
2. Магнитометр по п. 1, о т л и - чающийся тем, что устройство ввода курса и устройство ввода географических координат вьтолнены на элементах 2И, выходы которых являются выходами устройств, первые входы элементов 2И подключены к соот- ветствзтощим шинам судовой навигационной машины, а вторые входы коммутируются ключами вручную.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1998 |
|
RU2156440C2 |
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ЗАТОПЛЕННЫХ И ЗАИЛЕННЫХ ОБЪЕКТОВ НА МОРСКОМ ДНЕ | 2006 |
|
RU2319178C2 |
| Способ измерения магнитной индукции протонным магнитометром | 1988 |
|
SU1688213A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| Устройство для определения геомагнитного поля на подвижном носителе | 1989 |
|
SU1666991A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
Изобретение может быть исполь- зовано в устройствах для измерения индукции геомагнитного поля. Для повышения точности измерения величины магнитного поля вводят дополнительные устройства ввода курса, географических координат и поправки на намагниченность, выполненные на ци4 ровых интегральных элементах. 1 з.п. ф-лы, 2 нл. В ю со 4 СП О)
| Протонный магнитометр | 1979 |
|
SU834633A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Инструкция по магниторазведке | |||
| - Л.: Недра, 1981, с | |||
| Насос | 1917 |
|
SU13A1 |
