Изобретение относится к измерительной технике и может быть использовано, например, для автоматического контроля и регулирования перемещений, деформаций, измерения неэлектрических величин, изменяющих емкость датчика.
Известно устройство для измерения линейных перемещений, в котором для повышения точности измерения использован дифференциальный индуктивный датчик, первый и второй измерительные автогенераторы, в задающие контуры которых вклю- чен дифференциальный измерительный датчик, первый, второй и третий счетчики импульсов, третий автогенератор, два элемента 2-2И-ИЛИ-НЕ, элемент 2И-НЕ, блок управления, выход первого измерительного автогенератора соединен с первым и третьим входами первого элемента 2-2И-ИЛИ- НЕ, второй вход которого соединен с
первым выходом блока управления, четвертый вход- с вторым входом блока управления и с четвертым входом второго элемента 2-2И-ИЛИ-НЕ, выход первого элемента 2- 2И-ИЛИ-НЕ соединен с вычитающим входом первого счетчика импульсов, установочный вход которого соединен с третьим выходом блока управления, выход обратного переноса - с первым входом блока управления, входы параллельной записи первого счетчика импульсов соединены с выходами второго счетчика импульсов и с входами параллельной записи третьего счетчика импульсов, выход третьего автогенератора соединен с первым входом элемента 2И-НЕ, второй вход которого соединен с четвертым выходом блока управления, выход - с суммирующим входом второго счетчика импульсов, вход установки в О которого соединен с пятым выходом блоVJ
Ю СЛ О О Ю
ка управления, установочный вход - с шестым выходом блока управления, выход измерительного автогенератора соединен с первым и третьим входами второго элемента 2-2И-ИЛИ-НЕ, второй вход которого соединен с восьмым выходом блока управления, выход с вычитающим входом третьего счетчика импульсов, установочный вход которого связан с седьмым выходом блока управления, а выход обратного переноса - с вторым входом блока управления. Недостатком устройства для измерения перемещений является отсутствие синхронизации генераторов и цифровых преобразователей, что обусловливает погрешность равную одному периоду генераторов в каждом цикле квантования сформированных временных интервалов. Эта составляющая погрешности доминирует при малых перемещениях и ее можно уменьшить путем увеличения разрядности всех счетчиков, что, однако, приведет к увеличению времени измерения. При больших перемещениях возрастает составляющая погрешности, связанная с зависимостью фазовой характеристики автогенераторов от добротности колебательных систем, которая изменяется в зависимости от величины перемещения и обусловливает нелинейность функции преобразования.
Наиболее близким к предлагаемому является автогенераторный датчик линейных величин, содержащий образцовый и рабочий чувствительные элементы, два ключа, автогенератор, пороговый элемент, делитель частоты, распределитель импульсов, два элемента И, реверсивный счетчик и тактовый генератор, выходы образцового чувствительного элемента и рабочего чувствительного элемента подключены к ин- формационным входам соответственно первого и второго ключей, выходы которых подключены к входу автогенератора, выход которого через пороговый элемент подключен к информационному входу делителя частоты, соединенного с входом распределителя импульсов, первый, второй и третий выходы которого подключены к управляющим входам соответственно первого ключа, второго ключа и делителя частоты. .Первый и второй выходы распределителя импульсов подключены к первым входам соответственно первого и второго элементов, выходы которых подключены соответственно к вычитающему и суммирующему входам реверсивного счетчика, четвертый выход распределителя импульсов подключен к входу сброса реверсивного счетчика, выход тактового генератора подключен к вторым входам элементов И.
Недостатком автогенераторного датчика линейных величин является низкая точность и незначительный диапазон изменения измеряемой величины, обусловленный нелинейной зависимостью частоты автоколебаний от параметров колебательной системы, а также сложной и нестабиль0 ной зависимостью фазовой характеристики автогенератора от добротности контура, зависящей в свою очередь от величины измеряемого перемещения.
Цель изобретения - повышение точно5 сти и расширение диапазона измерения путемлинеаризациифункциипреобразования устройства для измерения угловых перемещений с помощью емкостного датчика,
0 Поставленная цель достигается тем, что в автогенераторном датчике линейных величин, содержащем рабочий и образцовый чувствительный элементы, опорный генератор, делитель частоты, блок управления
5 (распределитель импульсов), два элемента И и реверсивный счетчик, в котором чувствительный элемент является элементом колебательной системы измерительного автогенератора, компаратор, подключен0 ный к информационному входу делителя частоты, соединенного с блоком управления, третий выход которого соединен с установочными входами счетчика и делителя частоты, а второй и первый его выходы соединены
5 с первыми -входами элементов И, выходы которых подключены соответственно к суммирующему и вычитающему входам реверсивного счетчика, а выход опорного генератора соединен с вторыми входами
0 элементов И, дополнительно включены ждущий и автоколебательный мультивибраторы, входящие в состав импульсного автогенератора, а также два элемента И, второй делитель частоты и второй реверсив5 ный счетчик, а чувствительным элементом является емкостный датчик. Импульсный автогенератор состоит из последовательно включенных ждущего мультивибратора, колебательной системы с емкостным датчи0 ком перемещений, компаратора, первого делителя частоты, соединенного с одним из входов ждущего мультивибратора, второй вход которого соединен с автоколебательным мультивибратором, вход которого сое5 динен с выходом компаратора. Второй делитель частоты включен последовательно с первым и соединен с первым входом блока управления, второй вход которого соединен с выходом первого делителя частоты. Элементы И объединены по два выходными шинами генераторов, которые подключены к их вторым входам, и управляющими шинами блока управления, подключенными к первым входам элементов И таким образом, что первая выходная шина подключена к эле- ментам И, один из которых соединен с измерительным генератором, а второй с опорным, выход элемента И, вход которого подключен к опорному генератору, соединен с суммирующим входом первого ре- версивного счетчика, а второй элемент И подключен к вычитающему входу второго реверсивного счетчика. Вторая управляющая шина блока управления также соединена с двумя элементами И, выход элемента И, соединенного с измерительным генератором, подключен к вычитающему входу первого счетчика, а выход второго элемента, соединенного с опорным генератором, подключается к суммирующему входу второго реверсивного счетчика. Выход первого счетчика соединен с четвертым входом блока управления, а к выходу второго подключено устройство индикации.
Сопоставление с известным показыва- ет, что предлагаемое устройство отличается наличием новых блоков: автоколебательного и ждущего мультивибраторов, второго де- лителя частоты, второго реверсивного счетчика и двух дополнительных элемен- тов И.
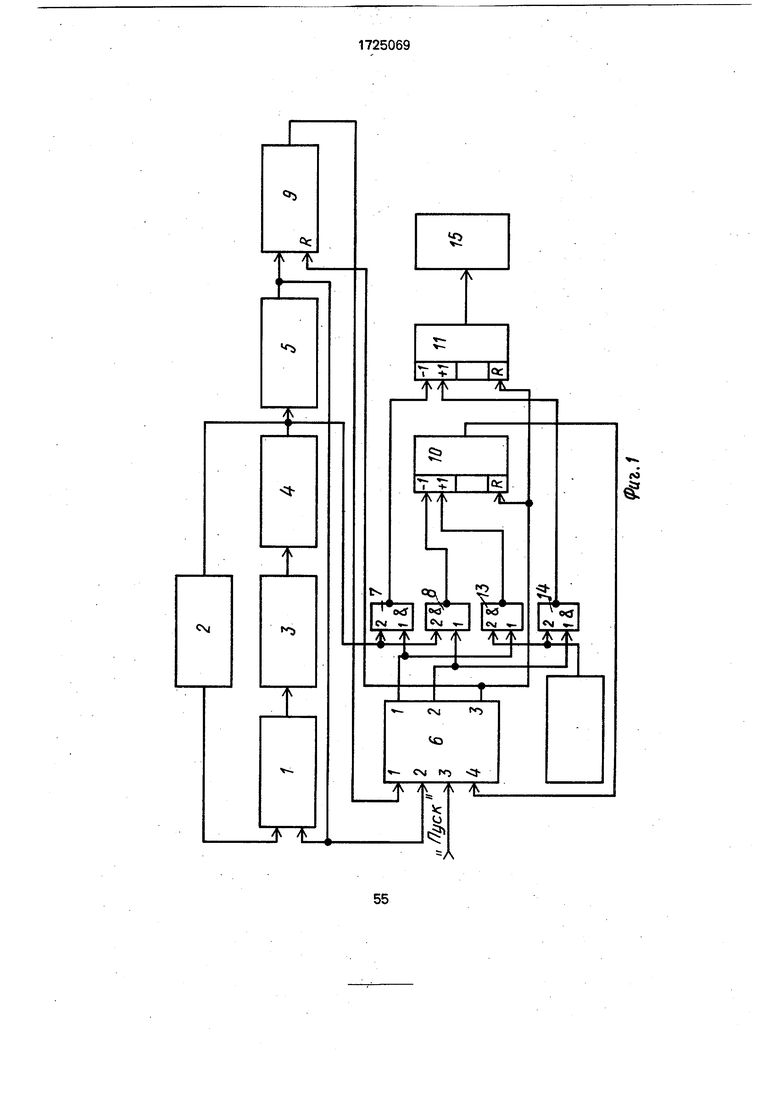
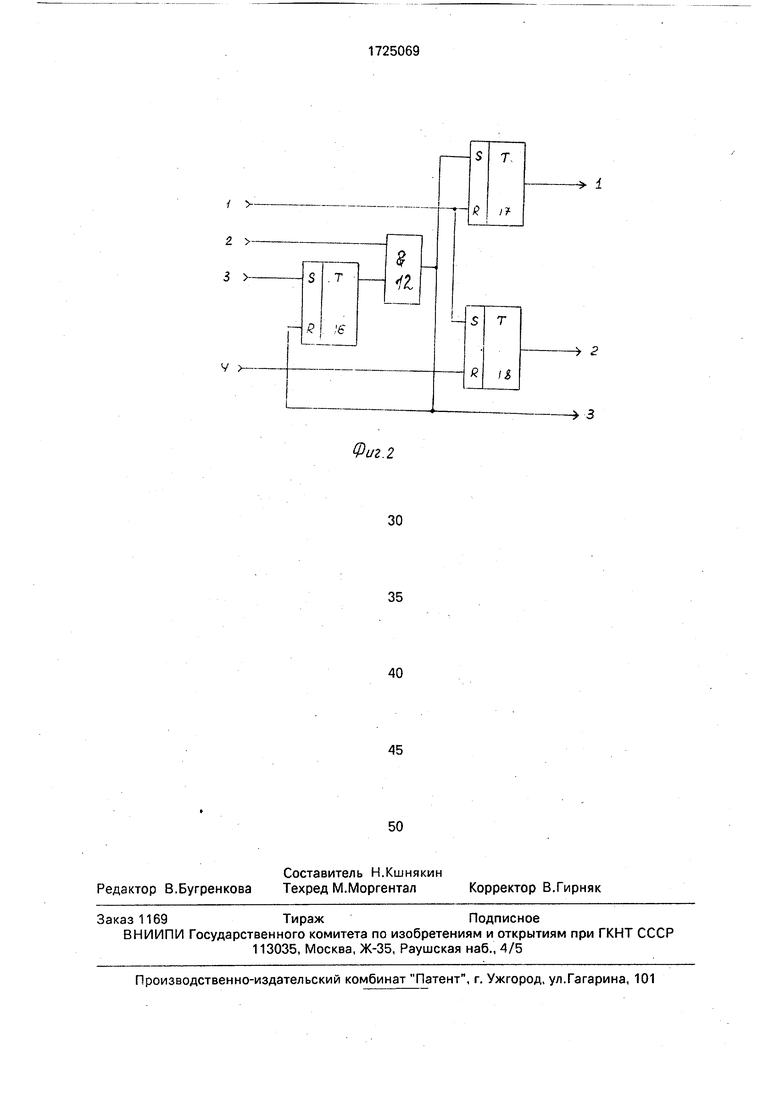
На фиг. 1 изображена структурная схема датчика угловых перемещений; на фиг. 2 - структурная схема блока управления.
Датчик перемещений состоит (фиг. 1) из ждущего 1 и автоколебательного 2 мультивибраторов, колебательной системы 3 с емкостным датчиком угловых перемещений и компаратора 4, соединенных последовательно. К выходу компаратора 4 подключе- ны первый делитель 5 частоты, вторые входы элементов И 7 и 8 и автоколебательный мультивибратор 2, а выход первого делителя 5 частоты соединен с вторым входом блока 6 управления, первый вход которого соединен с выходом второго делителя 9 частоты. Четвертый вход блока 6 управления соединен с выходом первого реверсивного счетчика 10. Вычитающие входы реверсивных счетчиков 10 и 11 соединены с выхода- ми элементов И 7 и 8, а суммирующие входы соединены с выходами элементов И 13 и 14.
Первый и второй управляющие выходы блока управления подключены к первым входам соответствующих элементов И, а третий выход соединен с установочными входами второго делителя 9 частоты, и реверсивных счетчиков 10 и 11. Устройство 15 визуальной индикации включено на выход второго реверсивного счетчика 11.
Блок 6 управления состоит (фиг. 2) из трех триггеров 16-18 и одного элемента И. По запросу ЭВМ или с устройства ручного пуска импульс напряжения поступает на третий вход блока 6 управления, т.е. на вход S-триггера 16, второй вход которого R соединен с выходом элемента И 12, входом S триггера 17 и третьим выходом блока управления. Выход триггера 16 соединен с одним из входов элемента И 12, а установочные R-входы триггера 17 и S триггера 18 соединены с первым входом блока 6 управления, выходы этих триггеров являются соответственно первой и второй выходной шиной блока 6 управления.
Датчик работает следующим образом.
В момент включения датчика напряжение на его элементах близко к нулю. Автоко- лебательный мультивибратор 2 вырабатывает импульс напряжения, поступающий на вход ждущего мультивибратора 1, который формирует короткий импульс напряжения, поступающий на элемент колебательной системы 3, содержащей емкостный датчик перемещений, в котором возникают экспоненциально затухающие колебания, поступающие на вход компаратора 4. Сформированные компаратором 4 прямоугольные импульсы напряжения выключают автоколебательный мультивибратор 2 и поступают на входы первого делителя 5 частоты и элементы И 7 и 8. Частота импульсов f первого делителя частоты
f Wk,.(1)
где fvi - резонансная частота измерительной колебательной системы; k, n - коэффициенты деления блоков 5, 9. Сформированные мультивибратором короткие импульсы напряжения, частота которых равна f, поддерживают колебания в контуре 3. Блок 6 управления перед каждым циклом измерений устанавливает второй делитель 9 частоты и счетчики 10 и 11 в нулевое состояние, затем управляющим импульсом, поступающим на вторые входы элементов И 7 и 13, включаются счетчики, причем первый счетчик 10 заполняется частотой опорного генератора, а к вычитающему входу счетчика 11 подключается измерительный генератор. Время работы счетчиков At равно
At knTn.TM 1/fH(2)
и в результате первый счетчик зафиксирует NI импульсов
Ni Atfo, а второй
.fn, .(3)
откуда видно, что At формируется из частоты генератора, т.е. не имеет составляющей погрешности квантования. По окончании
этой стадии преобразования сигнала управляющим импульсом, поступающим на входы элементов И 8 и 14, происходит переключение режима работы счетчиков. Содержимое первого счетчика 10 уменьшается импульсами измерительного генератора, а на суммирующий вход второго счетчика 11 подается сигнал опорного генератора до момента обнуления первого счетчика 10. В результате во второй счетчик 14 поступит NS импульсов, а числовой код NA устройства индикации может быть определен по формуле
д У
N4 N3 - N2 kn(TM2fo2 - 1) kn , (4)
где Ти 2 JTv/иСи; То 2 U. Ц - индуктивности колебательных систем измерительного и опорного генераторов, соответственно (предполагается, в частности, что LM LO); Си Со + А С. АС - приращение емкости датчика, обусловленное перемещением объекта измерения.
Таким образом, использование в датчике угловых перемещений последовательно включенных ждущего мультивибратора, колебательной системы с емкостным датчиком перемещений, компаратора и делителя частоты позволило реализовать импульсный автогенератор, амплитуда и длительность импульсов в котором практически не зависят от изменяющейся в процессе измерений добротности колебательной системы, а дополнительно включенные второй делитель частоты, два элемента И, второй ревер- сивный счетчик и блок управления, формирующий управляющие импульсы, синхронизированные с частотой измерительного генератора, снижают погрешность квантования и реализуют в соответствии с (1) -(4) алгоритм преобразования сигнала с линейной зависимостью выходного цифрового кода от угловых перемещений в широком диапазоне изменения емкости датчика без снижения точности.
Формула изобретения Датчик угловых перемещений, содержащий измерительный чувствительный элемент, опорный генератор, компаратор, первый делитель частоты, блок управления,
два элемента И и первый реверсивный Счётчик, компаратор, подключенный к входу первого делителя частоты, выход которого соединен с вторым входом блока управления, первый и второй его выходы соединены соответственно с первыми входами первого и второго элементов И, выходы которых подключены соответственно к вычитающему и суммирующему входам первого ревёрсивного счетчика, а выход опорного генератора соединен с вторым входом второго элемента И, о т л и ч а ю щ и и с я тем, что, с целью повышения точности и расширения диапазона измерения перемещений, в него дополнительно введены третий и четвертый элементы И, второй делитель частоты, второй реверсивный счетчик, ждущий и автоко- лебательный мультивибраторы и блок индикации, в качестве измерительного чувствительного элемента использован емкостный датчик перемещений, подключенный к выходу ждущего мультивибратора и соединенный с входом компаратора, выход первого делителя частоты соединен с входом
второго делителя частоты и первым входом ждущего мультивибратора, второй вход которого подключен к выходу автоколебательного мультивибратора, его вход объединен с выходом компаратора и вторыми входами
первого и второго элементов И, соединенных соответственно с вычитающими входами реверсивных счетчиков, а первые входы первого и третьего, второго и четвертого элементов И соединены с первым и вторым
выходами блока управления, третий выход которого соединен с установочными входами реверсивных счетчиков и второго делителя частоты, выход второго делителя частоты соединен с первым входом.блока
управления, четвертый вход блока управления соединен с выходом первого реверсивного счетчика, суммирующие входы счетчиков соединены с выходами третьего и четвертого элементов И, вторые входы
третьего и четвертого элементов И подключены к выходу опорного генератора, третий вход блока управления является управляющим входом датчика, выход второго реверсивного счетчика соединен с выходом блока
индикации.
го
€
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный измерительный дефектоскоп | 1990 |
|
SU1777068A1 |
| Устройство для измерения влажности | 1984 |
|
SU1205004A1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
| Измеритель электропроводности | 1989 |
|
SU1670623A1 |
| Многоканальный измерительный стрелочный прибор | 1987 |
|
SU1504619A1 |
| Многоканальное устройство фазирования | 1989 |
|
SU1646051A1 |
| Цифровая система управления | 1986 |
|
SU1361500A1 |
| Система управления вертикальными перемещениями рабочего органа льдоскалывающего агрегата | 1985 |
|
SU1298710A1 |
| Устройство для измерения ускорений | 2022 |
|
RU2793846C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля перемещений. Цель изобретения - повышение точности и расширение диапазона измерений. Цель достигается тем, что в датчик, содержащий чувствительный элемент, генератор, компаратор, делитель, блок управления, два элемента И и счетчик, дополнительно введены два элемента И, вторые делитель и счетчик, два мультивибратора и блок индикации. Использование соединения мультивибратора, чувствительного элемента, компаратора и делителя позволяет реализовать импульсный автогенератор, параметры импульсов которого не зависят от добротности колебательной системы, а соединение вторых делителя и счетчика, дополнительных элементов И с блоком управления снижает погрешность дискретности и линеаризует выходную характеристику. 2 ил. (Л С
| Устройство для измерения линейных перемещений | 1986 |
|
SU1374036A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автогенераторный датчик линейных величин | 1987 |
|
SU1441174A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
