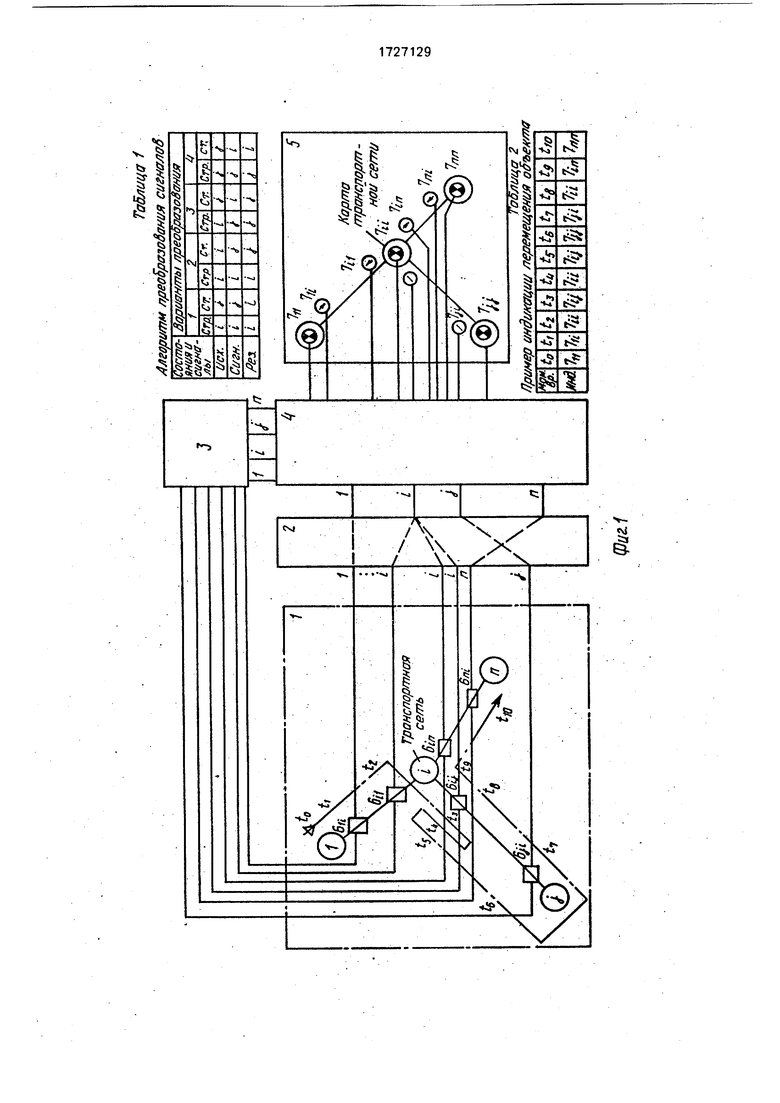
Блок датчиков 1 предназначен для формирования сигналов о перемещении подвижного объекта. Датчики 6ij предназначены для селекции контролируемого подвижного объекта из множества объектов и формирования сигналов о его прохождении через выходы ij узлов транспортной сети, на которых размещены датчики. Селекция подвижного объекта большой грузоподъемности из множества циркулирующего подвижного состава и железнодорожной транспортной сети может осуществляться, например, с помощью настроенных на удельное давление колесных пар объекта тензодатчиков, закрепляемых на рельсах у входных стрелок станционных узлов.
Шифраторы строк 2 и столбцов 3 на входов (где m - число ребер графа транспортной сети) и п выходов каждый предназначены для формирования сигналов на выходах 1.,, при поступлении сигналов на входах 1...N от датчиков 6IJ с одноименными первыми (), и вторыми (.п) индексами строк и столбцов матрицы транспортной сети соответственно.
Блок 4 предназначен для преобразования сигналов датчиков по алгоритму, приведенному на фиг. 1 в табл. 1. В первой строке табл. 1, задающей алгоритм, приведены обозначения исходных положений или направлений движения объекта, во второй строке - обозначения датчиков, от которых поступают сигналы, в третьей строке - результаты преобразования сигналов датчиков, представляющие собой обозначения результирующих положений (II, jj) или направлений движения (ij, ji)объекта для четырех вариантов преобразования по строкам и столбцам матрицы транспортной сети.
Блок 5 предназначен для наглядного отображения перемещения объекта на карте транспортной сети. Индикаторы 7 II размещаются с привязкой к обозначениям узлов транспортной сети и предназначены для индикации местопребывания объекта в этих узлах, индикаторыTij(Mj) размещаются на карте с привязкой к выходам узловтранс- портной сети и предназначены для индикации направления движения объекта (обозначается стрелкой).
На фиг. 1 приведен пример индикации перемещения объекта по заданному маршруту, обозначенному на фоне блока датчиков 1. В исходном состоянии (обозначено треугольником) в момент времени to объект находится в пункте (узле) 1 транспортной сети.. Дальнейшее движение объекта обозначено штрих-пунктирной линией. Состояние индикации перемещения объекта в
моменты после выдачи сигналов дат чика приведено в табл. 2.
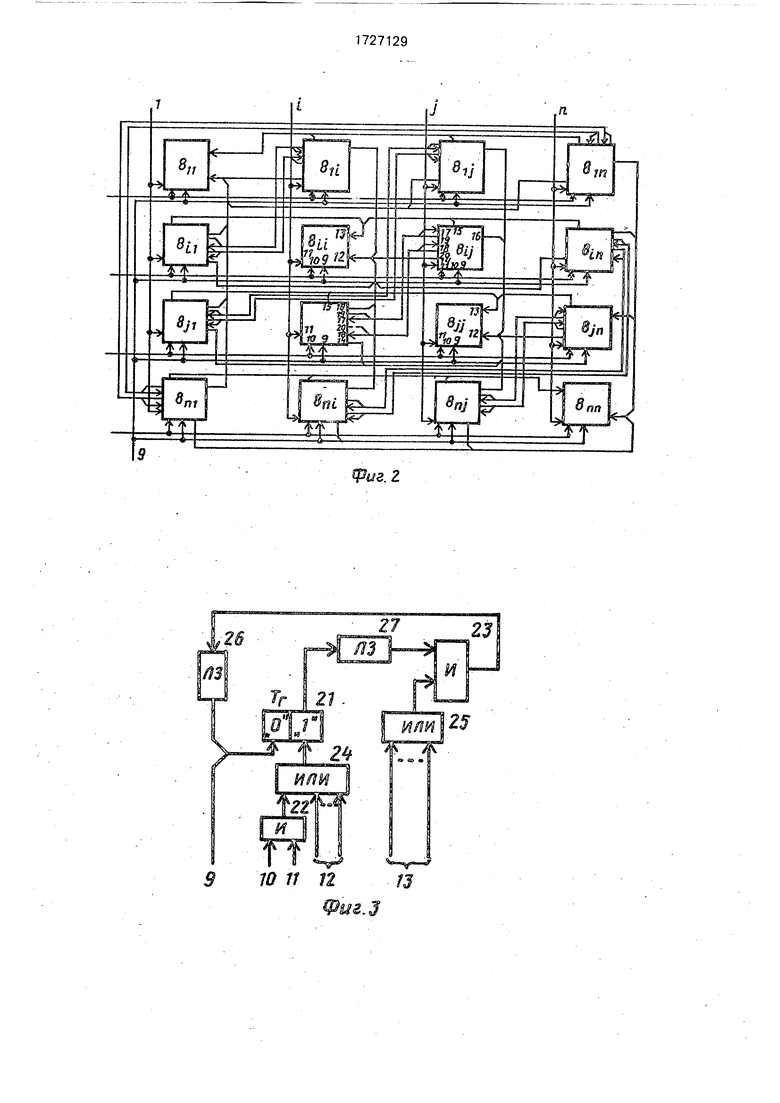
Матрица 4 содержит п2 узлов обработки сигналов 8ij (i,1,п),размещаемых в узлах
матрицы размерности пхп узлы 8 ij имеют общие входы 9 установки исходного состояния устройства. Узлы 8 Икаждой 1-й () строки и каждого j-ro ) столбца матрицы имеют общие входы 10, 11 соответствен0 но. Кроме того, узлы 8II ( имеют группы входов 12, 13, узлы 8 Ij (i,, n, t/j) имеют выходы 14, 15, подключенные к одному из входов 12,13 группы соответственно узла 811 общей с узлом eij-строки матрицы, и выход
5 16, подключенный к одному из входов 12 группы узла 8jJ общего с узлом 8IJ столбца, матрицы. Узлы 8lj(8ji) имеют также входы 17, 18 и выходы 19, 20, при этом входы 17 блоков 8lj, 8jl (, , n, (соединены с
0 выходами 19, а входы 18. - выходами 20 узлов 8JI, 8ij соответственно.
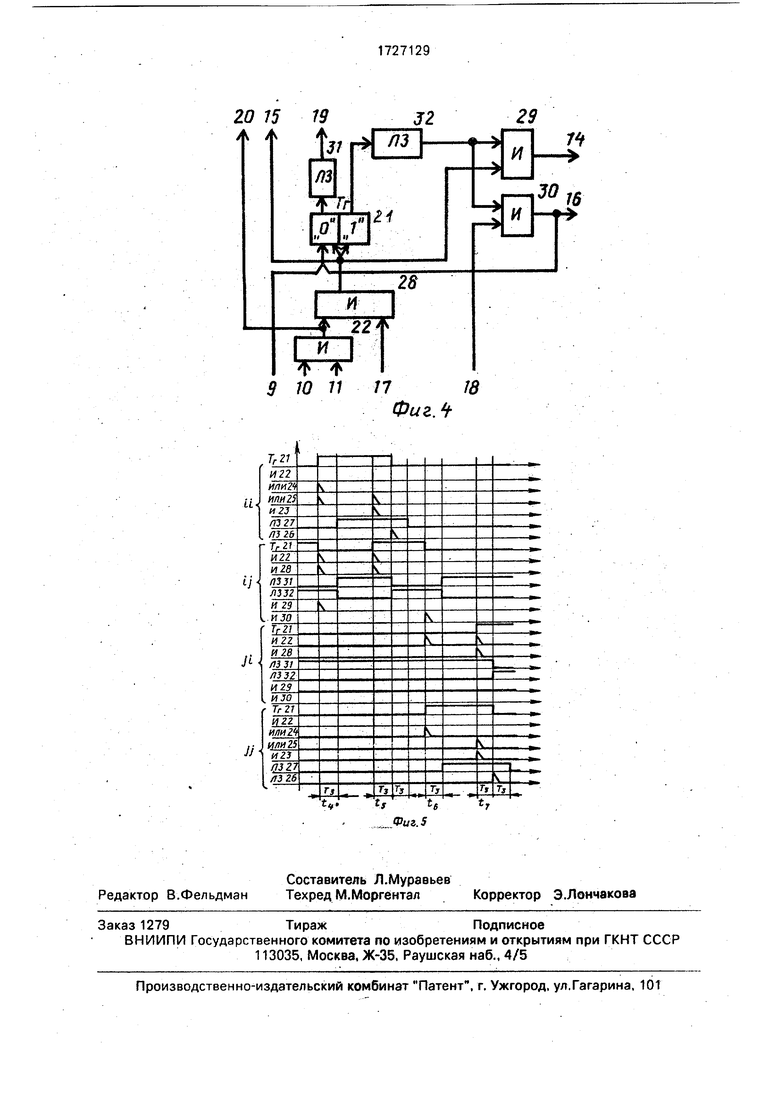
Узлы .811, 8ij содержат триггеры Т 21 и элементы И 22 с входами 10, 11, элемент И 23, элементы ИЛИ 24, 25 и элементы задер5 жки 26. 27. Элементы задержки служат для задержки сигналов на время переходных процессов переключения триггеров и срабатывания схем. VseaSij содержит, кроме элемента И 22 и триггера 21, элементы И 28. 29,
0 30, элементы задержки 31,32, служащие для задержки сигналов на время переходных процессов в схемах.
Устройство работает следующим образом.
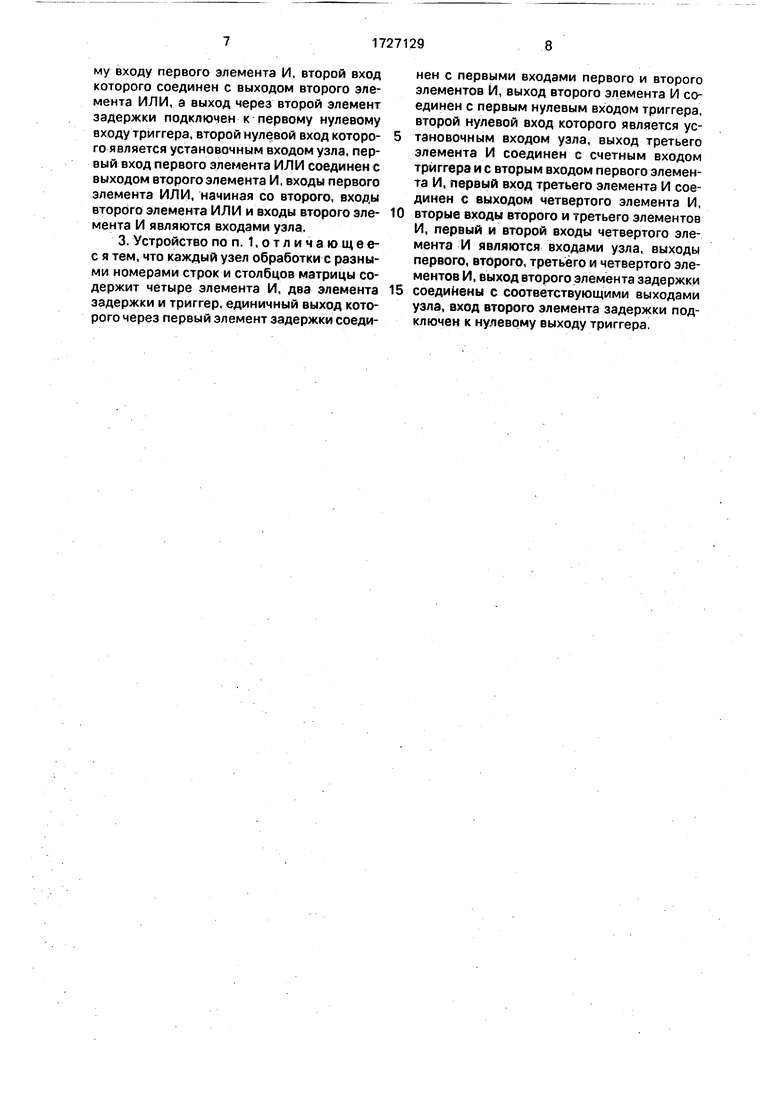
5 После общего сброса устройства, осуществляемого подачей сигнала достаточной продолжительности на вход 9, производится установка в состояние 1 подачей сигнала на единичный вход триггера 21 узла Qii
0 или 8IJ, соответствующего исходному местоположению объекта в узле Н или направлению перемещения ij объекта в транспортной сети. Временная диаграмма работы устройства для исходного состояния 1 триггера 21
5 узла 81}, при котором горит индикатор 7ij блока 5, приведена на фиг. 5. В момент времени t4 движения объекта по маршруту, приведенному на фиг. 1, срабатывает датчик 6IJ и выдает сигналы на входы шифратора
0 строк 2 и шифратора столбцов 3. По поступившим на входы шифраторов сигналам от датчика 6IJ формируются сигналы на i-м выходе шифратора 2 и j-м выходе шифратора 3, поступающие на шины 1-й строки и jrro
5 столбца матрицы 4. При поступлении сигна: ла на входы 10, 11 узла 8ij срабатывает элемент И 22. При срабатывании элемента И 22 срабатывают также элемент И 28, на входе 17 которого присутствует подпор с инверсного выхода триггера 21 узла 8 ij, и элемент
И 29. Сигнал с выхода элемента И 28 поступает на счетный вход триггера 21 узла 8IJ и переводит его в состояние О, при этом гаснет индикатор 7ij. Одновременно сигнал с выхода элемента И 29 через выход 14 узла 8iJ поступает на один из входов 12 группы узла 8il и через элемент ИЛИ 24 этого узла переводит триггер 21 узла 8М в состояние 1, при этом загорается индикатор7И блока 5. Через время задержки Тз, как показано на фиг. 5, изменяется сигнал на выходах элементов задержки 31, 32 узла 8IJ и 27 узла 8И в соответствии с изменением состояния триггеров этих узлов. При этом цикл работы устройства завершен, В момент времени 15 вновь срабатывает датчик 6IJ, сигналы от которого через шифратор 2, 3 поступают на входы матрицы 4. Аналогичным образом (как в предыдущем цикле) срабатывают элементы И 28, 29 узла 8ij. Сигнал с выхода элемента И 28 переводит триггер 21 узла 8IJ в состояние 1, при этом загорается индикатор 7ij блока 5. Одновременно сигнал с выхода элемента И 28 через выход 15 узла 8ij поступает на вход 13 узла 8IJ и через элемент ИЛИ 25, элемент И 23, на первом входе которого имеется подпор с прямого выхода триггера 21 узла 8ii, поступает на вход элемента задержки 26. Через время задержки Тз импульс с выхода элемента 26 устанавливает триггер 21 узла 8ii в состояние О, при этом гаснет индикатор 7ii. В этот же момент изменяется сигнал на выходах элементов 31, 32 узла 8ij. Через время Тз после перехода триггера 21 блока 8II в состояние О изменяется сигнал на выходе элемента задержки 27 этого узла, после чего устройство готово к следующему циклу работы. После срабатывания датчика 6 JI в момент времени te срабатывает элемент. И 22 узла 8 ji, с выхода которого сигнал поступает через выход 20 узла 8ji на вход 18 узла 8ij. При поступлении сигнала на вход 18 срабатывает элемент И 30, на первом входе которого присутствует подпор с прямого выхода триггера 21 узла 8ij. Сигнал с выхода элемента И 30 осуществляется перевод в состояние О триггера 21 узла 8ij, при этом гаснет индикатор 7ij, и через выход 16 этого узла поступает на вход 12 узла 8jj. Сигнал, поступивший на вход 12 узла 8jj, через элемент ИЛИ 24 осуществляет установку триггера 21 этого узла в состояние 1, при этом загорается индикатор 7jj. Через время задержки Тз изменяется сигнал на выходах элементов 31, 32 узла 8ij и элемента 27 узла 8jj. Переходные процессы в устройстве в данном цикле завершены. Последний, из циклов работы устройства заключается в следующем. В момент времени t срабатывает датчик 6 и выдает сигналы на шифрато ры 2, 3. По выходным сигналам шифратороп срабатывает элемент И 22 узла 8ji По сиг налу с выхода этого элемента срабатывает о элемент И 28, на входе 17 которого имеется подпор с выхода 19 узла 8IJ. Сигнал с выхода элемента И 28, поступающий на счетный вход триггера 21 узла 8JI, переводит триггер в состояние 1 (при этом загорается индк10 катор7 1) и через выход 15 поступает на вход 13 узла 8jJ. Сигнал, поступивший на вход 13 группы узла 8jj, через элемент ИЛИ 25 происходит на; вход элемента И 23, на первом входе которого имеется подпор с прямого
5 выхода триггера 21 этого узла. Элемент И 23 срабатывает и выдает сигнал на элемент задержки 26. Через время Тз сигнал с выхода элемента 26 устанавливает в О триггер 21 узла 8jj, при этом гаснет индикатор 7jj. В
0 этот же момент времени изменяются сигналы на выходах элементов задержки 31, 32 блока 8jj. Через время Тз после перевода в состояние О триггера 21 изменяется сигнал на выходе элемента 27 - цикл работы
5 устройства завершен.
Формула изобретения 1. Устройство для контроля перемещения объекта в транспортной сети, содержащее матрицы узлов обработки, отличаю0 щ е е с я тем, что, с целью расширения функциональных возможностей за счет обеспечения динамического определения местонахождения путем фиксирования информации о положение объекта, в него введе5 ны шифратор строк ребер графа транспортной сети, шифратор столбцов ребер графа транспортной сети, N датчиков, размещенных на выходах п узлов транспортной сети, информационные входы ,N шифратора строк
0 ребер графа транспортной сети соединены с первыми выходами датчиков соответственно, информационные входы ,N шифратора столбцов ребер графа соединены с вторыми выходами датчиков соответствен5 но, выходы шифратора строк ребер графа транспортной сети и выходы шифратора столбцов ребер графа транспортной сети соединены с соответствующими входами строк и столбцов матрицы узлов
0 обработки, выходы которой являются выходами устройства, а установочный вход является установочным входом устройства.
2. Устройство по п, 1, о т л и ч а ю щ е е- с я тем, что каждый узел обработки с одина5 ковыми номерами строк и столбцов содержит два элемента И, два элемента ИЛИ, два элемента задержки и триггер, единичный вход которого соединен с выходом первого элемента ИЛИ, единичный выход через первый элемент задержки подключен к первому входу первого элемента И, второй вход которого соединен с выходом второго элемента ИЛИ, а выход через второй элемент задержки подключен к первому нулевому входу триггера, второй нуле.вой вход которого является установочным входом узла, первый вход первого элемента ИЛИ соединен с выходом второго элемента И, входы первого элемента ИЛИ, начиная со второго, входы второго элемента ИЛИ и входы второго элемента И являются входами узла.
3. Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что каждый узел обработки с разными номерами строк и столбцов матрицы содержит четыре элемента И, два элемента задержки и триггер, единичный выход которого через первый элемент задержки соединен с первыми входами первого и второго элементов И, выход второго элемента И соединен с первым нулевым входом триггера, второй нулевой вход которого является установочным входом узла, выход третьего элемента И соединен с счетным входом триггера и с вторым входом первого элемента И, первый вход третьего элемента И соединен с выходом четвертого элемента И,
вторые входы второго и третьего элементов И, первый и второй входы четвертого элемента И являются входами узла, выходы первого, второго, третьего и четвертого элементов И. выход второго элемента задержки
соединены с соответствующими выходами узла, вход второго элемента задержки подключен к нулевому выходу триггера.
Таблица 1 Алгоритм лреоБразоВания сигналов
9 10 11 1718
ФигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ ЗАЩИТЫ ВЫЧИСЛИТЕЛЬНОЙ СЕТИ | 2005 |
|
RU2292081C1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ О НАЗНАЧЕНИЯХ | 2010 |
|
RU2439687C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ ЗАЩИТЫ ВЫЧИСЛИТЕЛЬНОЙ СЕТИ | 2007 |
|
RU2335016C1 |
| Устройство для решения задачи о назначениях | 2016 |
|
RU2613523C1 |
| Устройство для перебора перестановок | 2018 |
|
RU2693996C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПРИНЯТИЯ РЕШЕНИЯ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ | 2013 |
|
RU2534924C2 |
| Устройство для решения задачи о назначениях исполнителей по работам | 2017 |
|
RU2665305C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГРАФИКА РАБОТЫ СОТРУДНИКОВ УЧРЕЖДЕНИЯ | 2010 |
|
RU2434273C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГРАФИКА РАБОТЫ СОТРУДНИКОВ УЧРЕЖДЕНИЯ | 2011 |
|
RU2480827C1 |
| Устройство для технико-экономической оценки выполнения научно-исследовательских и опытно-конструкторских работ | 2015 |
|
RU2613022C1 |