Изобретение относится к измерительной технике и может использоваться в технологии судостроения и машиностроения для определения координат центра тяжести и центра величины (центра давления жидко- сти на погруженное в нее тело) тел вращения.
Известен стенд для определения центра тяжести, включающий поворотный стол на платформе, опертой в центре на шаро- вую опору и снабженной двумя кронштейнами, расположенными в двух взаимноперпендикулярных направлениях. Кронштейны оперты на силоизмерительные датчики. Ось одного из кронштейнов гори- зонтальна, а второго наклонена на угол 2- 30°, Изделие устанавливается на стол вертикально и в процессе измерения поворачивается на 90° вокруг оси вращения стола. По показаниям силоизмерительных датчиков, известной длине кронштейнов и наклону одного из них в двух положениях изделия рассчитывают координаты центра тяжести изделия.
Недостатками стенда являются необхо- димость установки изделия в вертикальное положение, сложность базирования изделия на столе и невозможность определения центра величины изделия.
Известен стенд, включающий основание, подвес, опорный узел, платформу для крепления изделия и датчики наклона платформы. О координатах центра тяжести изделия судят по результатам таррировки и показаниям датчиков наклона платформы. Недостатками стенда являются сложность базирования изделия и необходимость подвеса изделия близко от центра тяжести, для чего требуется заранее определить район расположения центра тяжести с необходимой степенью точности, а также невозможность определения центра величины и массы изделия.
Известен стенд для определения коор- динат центра тяжести тела, содержащий основание в виде емкости с жидкостью, раму с опорой, размещенную на последней платформу и систему измерения, включающую датчик угла поворота платформы.
Недостатками стенда является невозможность определения всех трех координат центра тяжести и центра плавучести тела.
Целью изобретения является расширение функциональных возможностей.
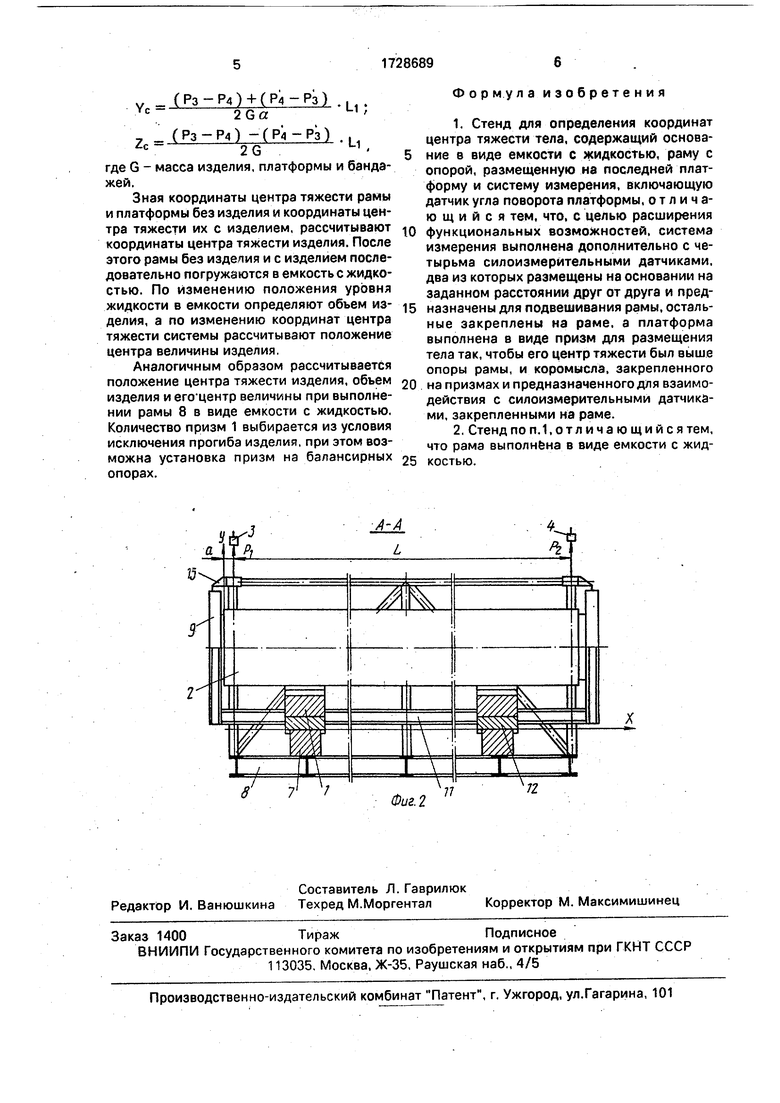
На фиг.1 представлена схема стенда для определения центра тяжести тела; на фиг.2 - разрез А-А на фиг. 1.
Стенд включает в себя платформу в виде призм 1 для установки изделия 2, сило- измерительные датчики 3-6, ножевые
опоры 7, раму 8, коромысло 9, основание 10 в виде емкости с жидкостью. Призмы 1 Платформы связаны между собой тягами 11 в единую систему, коромысло 9 закреплено к системе призм 1, последние снабжены подушками 12, в которые упираются ножевые опоры 7. Изделие 2 крепится к призмам 1 бандажными лентами 13 и фиксируется по длине и развороту упорами 14, Ножевые опоры 7 закреплены к раме 8, подвешенной к силоизмерительным датчикам 3 и 4. Сило- измерительные датчики 5 и 6 закреплены на съемных балках 15 рамы 8 и упираются в коромысло 9 с возможностью поворота призм 1 вокруг линии ножевых опор 7. Коромысло 9, ножевые опоры 7 и подвес рамы 8 расположены в плоскости симметрии призм 1 платформы.
Рама в одном из вариантов может быть снабжена стенками (не показаны) и выполнена в виде емкости с жидкостью. В другом варианте рама 8 может погружаться в емкость с жидкостью в основании 10. Силоизмерительные датчики 3 и 4 могут быть установлены снизу рамы 8, при этом линии действия их упора или их подвеса должны находиться в плоскости симметрии призм 1. Отклонение от горизонтальности призм платформы контролируется квадрантом 16 типа КО-10, установленным на контрольные площадки призм 1.
При измерениях положения центра тяжести изделие 2 укладывают на призмы платформы 1, базируют его по длине и развороту упорами 14, связывают с призмами бандажными лентами 13 и подвешивают (или опирают) раму 8 к силоизмерительным датчикам 3 и 4. Горизонтальность изделия на призмах контролируют квадрантами 16. Измеряют усилия PI и Ра. Координату центра тяжести системы по оси X определяют из выражения
Y - P2 L - + 3
Хс- р1+Р2 +а .
Массу изделия определяют путем вычитания из суммы показаний датчиков 3 и 4 величины массы рамы 8 с платформой и бандажами. Затем к коромыслу 9 прикладывают усилие, и изделие 2 с призмами 1 наклоняется вокруг линии ножевых опор 7 на малый угол а. Измеряют усилия Рз и Р/ силоизмерительными датчиками 5 и 6, затем изделие 2 с призмами 1 наклоняется на тот же угол а. в противоположную сторону, и измеряются усилия Рз и РА, Наклоны измеряют квадантами 16. Координаты центра тяжести системы по осям Y и Z определяют из выражений
( РЗ Р4 ) + ( Р4 РЗ )
2Ga (Рз-PQ -(Pj-Рз)
2G
где G - масса изделия, платформы и бандажей.
Зная координаты центра тяжести рамы и платформы без изделия и координаты центра тяжести их с изделием, рассчитывают координаты центра тяжести изделия. После этого рамы без изделия и с изделием последовательно погружаются в ем кость с жидкостью. По изменению положения уровня жидкости в емкости определяют объем из- делия, а по изменению координат центра тяжести системы рассчитывают положение центра величины изделия.
Аналогичным образом рассчитывается положение центра тяжести изделия, объем изделия и его центр величины при выполнении рамы 8 в виде емкости с жидкостью. Количество призм 1 выбирается из условия исключения прогиба изделия, при этом возможна установка призм на балансирных опорах.
JQ15
QQ 25
Формула изобретения
1.Стенд для определения координат центра тяжести тела, содержащий основание в виде емкости с жидкостью, раму с опорой, размещенную на последней платформу и систему измерения, включающую датчик угла поворота платформы, отличающийся тем, что, с целью расширения функциональных возможностей, система измерения выполнена дополнительно с че- тырьма силоизмерительными датчиками, два из которых размещены на основании на заданном расстоянии друг от друга и предназначены для подвешивания рамы, остальные закреплены на раме, а платформа выполнена в виде призм для размещения тела так, чтобы его центр тяжести был выше опоры рамы, и коромысла, закрепленного на призмах и предназначенного для взаимодействия с силоизмерительными датчиками, закрепленными на раме.
2.Стенд поп. 1, от ли ч а ю щийся тем, что рама выполнена в виде емкости с жидкостью.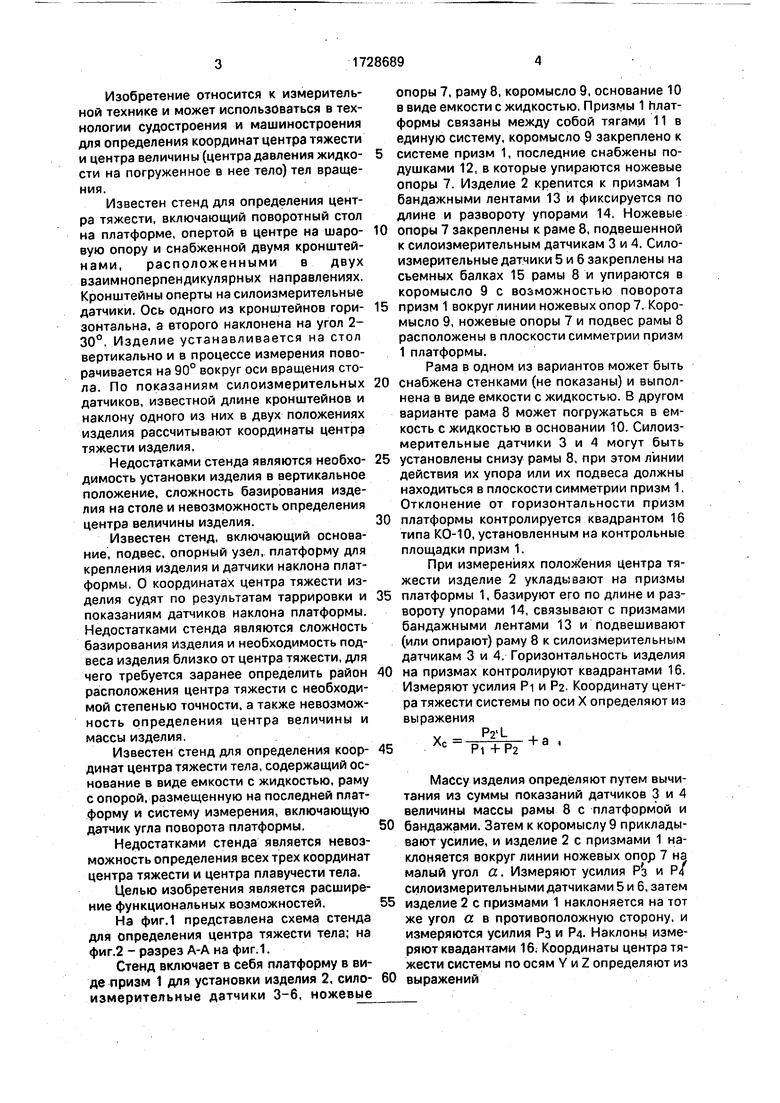
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| Устройство для определения моментного веса лопаток турбин | 1983 |
|
SU1143985A1 |
| Устройство для определения координат центра тяжести изделий | 1976 |
|
SU658417A1 |
| Стенд для определения массоцентровочных характеристик изделий больших масс | 2016 |
|
RU2655726C2 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
| Способ создания сочетаний крен-дифферентных положений тяжелого изделия, имеющего гусеничный или колесный движитель, и стенд для его осуществления | 2023 |
|
RU2809962C1 |
| Весы для определения массы контрольного улья | 1991 |
|
SU1811591A3 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
| Устройство для определения веса и координаты центра тяжести длинномерных изделий | 1983 |
|
SU1157376A1 |
Изобретение относится к измерительной технике и может использоваться для определения координат центра тяжести тел вращения. Цель изобретения - расширение функциональных возможностей путем определения положения центра давления тела. Стенд содержит основание 10 в виде емкости с жидкостью, раму 8 с опорой, размещенную на ней платформу в виде призм 1 для установки изделия 2 и систему измерения в виде четырех силоизмерительных датчиков и квадранта 16 для контроля углового положения платформы. 1 з.п.ф-лы, 2 ил.
| Способ определения координат центра тяжести изделия | 1977 |
|
SU868378A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Устройство для балансировки роторов | 1984 |
|
SU1224633A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Устройство для определения координат центра тяжести однородного тела | 1972 |
|
SU427635A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
