Известно устройство для определения координат центра тяжести изделия, содержащее основание, раму, узел связи рамы и основания, блок крепления изделия, шар- нирно связанный с рамой и чувствительные элементы, расположенные между основанием и рамой, причем узел связи выполнен в виде шарнирно связанных с основанием и углами рамы стержней, расположенных под углом к плоскости рамы, блок крепления в виде стола, привода для его поворота в вертикальной плоскости и фиксатора поворота, а чувствительные элементы расположены попарно в двух взаимно перпендикулярных направлениях, Устройство обеспечивает определение трех координат центра масс благодаря возможности поворота стола (вместе с изделием) относительно двух взаимно- перпендикулярных осей и измерения горизонтальных составляющих реакций в наклонных стержнях (тягах подвеса),
Известен стенд, принятый за прототип, для определения момента инерции и координат центра тяжести моделей судов, содержащий опорную ферму и закрепленную на ней с возможностью качания вокруг горизонтальной оси раму с механизмом перемещения, позволяющим перемещать ее е вертикальной плоскости, стол для крепления модели с грузом, перемещающимся вдоль стола перпендикулярно плоскости рамы, и противовесы, закрепленные на раме с возможностью перемещения в вертикальной плоскости, причем механизм перемещения выполнен в виде двух ходовых винтов с резьбой различного шага и направления, обеспечивающих перемещение противовесов и рамы относительно фермы в противоположных направлениях, а противовесы перемещаются по резьбе большего шага. Стенд обеспечивает центровку изделия (модели) относительно заданной оси, т.е. определение центра масс путем перемещения изделия по платформе в горизонтальном направлении и перемещения вместе с платформой в вертикальном направлении. При этом платформа постоянно уравновешена относительно оси качания посредством подвижных противовесов. Разбалансировка платформы регистрируется силоизмерительным устройством, распо- ложенным между опорной фермой и связанной с платформой рамой стенда.
Недостатками прототипа являются ма- лай точность и ограниченные эксплуатационные возможности вследствие того, что крепление изделия осуществляется посредством установки на платформу. В результате положение изделия (и, как следствие, - положение его центра масс) определяется с
точностью до величин относительной линейной погрешности установки изделия на платформе и относительно наружных выступающих частей изделия (а не относительно
штатных или нештатных центров креплений, положение которых определено с заданной точностью). Изделие должно иметь по крайней мере две установочные поверхности (платформа имеет плоскую площадку), положение которых также влияет на точность измерений. Указанные недостатки не позволяют повысить точность измерений и ограничивают применение стенда в части определения координат центра масс изделий произвольной формы.
Целью предлагаемого изобретения является повышение точности измерений и расширение эксплуатационных возможностей в части определения координат центра
масс изделий сложной формы.
С этой целью в известном устройстве, содержащем основзниес шарнирными опорами, установленную на них платформу с направляющими для закрепления изделия,
каретку и уравновешивающий ее противовес, установленные на направляющих с возможностью перемещения вдоль них и весоизмерительный инструмент, размещенный под одной из опор, платформа еыполнена в виде горизонтальной балки с двумя вертикальными штангами, одна из которых фиксирована относительно основания неподвижно, а вторая закреплена шарнирно на каретке, штанги на свободных
концах снабжены шарнирно закрепленными с возможностью поворота относительно трех взаимно-перпендикулярных осей захватами, предназначенными для крепления изделия, причем центр поворота каждого
захвата совмещен с центром его масс осью штанги. Устройство может иметь усовершенствования для дополнительного повышения точности измерений. Центр масс второй штанги может быть выведен в точку
пересечения оси этой штанги с осью ее поворота на шарнире каретки. Одна или обе штанги устройства могут быть выполнены регулируемыми по длине. Вторая штанга, центрированная относительно оси поворота на шарнире каретки и регулируемая по длине может быть снабжена противовесом, установленным на ней подвижно е осевом направлении.
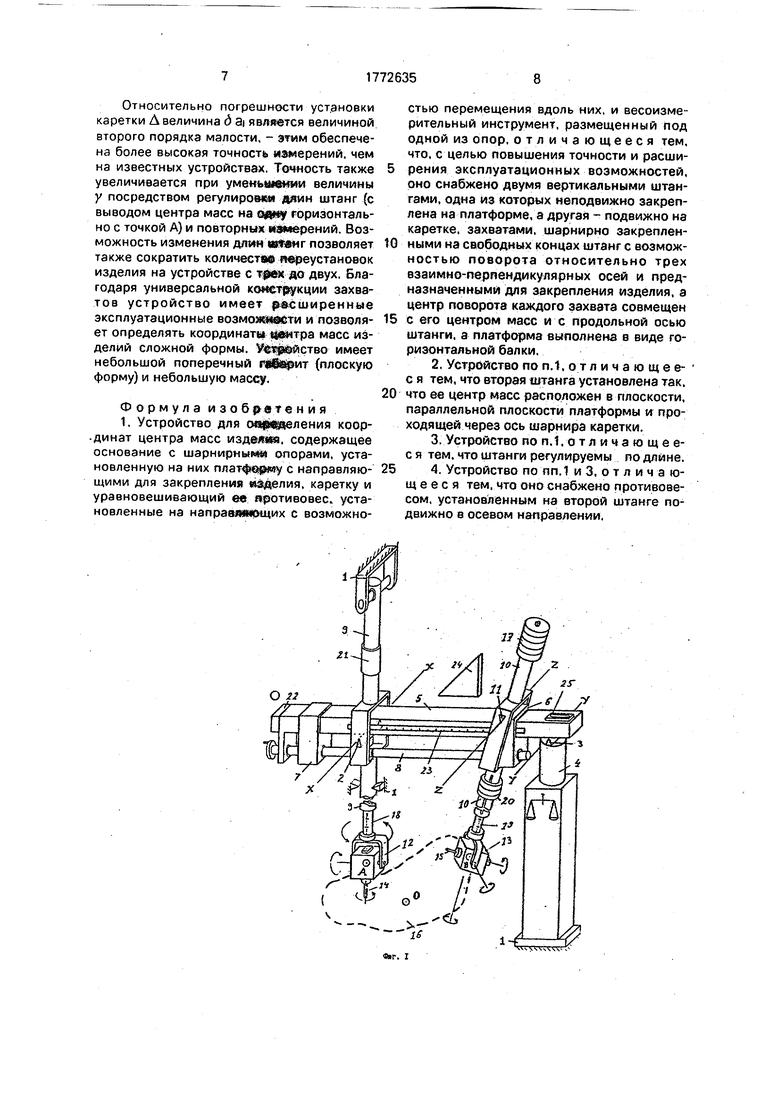
На фиг Л изображена одна из возможных конструкций устройства; на фиг.2 - его плоское схематичное изображение с обозначениями параметров и геометрической схемой.
Устройство (фиг. 1,2} имеет основание t,
на котором закреплены шарнирные опоры 2
и 3 с осями поворота X и Y соответственно, причем между основанием 1 и опорой 3 установлен весоизмерительный инструмент 4. На опорах установлена платформа (балка) 5 устройства, выполненная в виде призматической балки.- На внешней поверхности балки 5 как на направляющей расположены каретка 6 и противовес 7 с возможностью перемещения в1 разные стороны посредством, например, двойного ходового винта 8. Штанга 9 устройства закреплена вертикально и неподвижно относительно опоры 2. Вторая штанга 10 закреплена на каретке б посредством шарнирной опоры 11 : осью поворота z. На свободных концах штанги снабжены захватами 12 и 13. например, резьбовыми, с винтами 14 и 15, установленными с возможностью поворота относительно трех взаимно-перпендикулярных осей вокруг своих центров А и В, лежащих на осях штанг. Посредством захватов 12 и 13 на устройстве закрепляется изделие 16 с центром масс О, положение которого надо определить. Центр масс штанги 10 выведен на ось ее поворота z посредством противовеса 17. Штанги 9 и 10 могут регулироваться по длине с помощью ходовых винтов 18 и 19. Штанга 10 может быть снабжена подвижным противовесом 20. Для контроля и регулировки устройство может быть снабжено регулировочным винтом 21. противовесом 22, линейной мерой 23, угломером 24 иуров- нем 25.
Устройство на фиг. 1,2 работает следующим образом. Изделие 16 закрепляется на устройстве посредством винтов 14 и 15 на концах штанг 9 и 10. При этом каждый из захватов 12, 13 поворачивается вокруг своего центра на требуемый угол для обеспечения соосности резьбового гнезда изделия и винта захвата, Балка 5 устанавливается в горизонтальное положение регулировочным винтом 21 с контролем уровнем 25. Посредством двойного ходового винта 8 каретка 6 перемещается до установки штанги 10 в вертикальное положение с контролем по линейной мере 23 и угломером 24. Противовес 7 движется в направлении, обратном перемещению каретки 6, поэтому разбалансирования балки устройства относительно оси поворота X опоры 2 не происходит. Относительная длина штанг 9 и 10 изменяется посредством винтов 18 и 19, при этом противовес 20 перемещается винтом 19 в направлении, обратном перемещению выдвижной части штанги 10 и обеспечивает сохранение ее центровки относительно оси ее поворота z. Весоизмерительным инструментом 4 измеряют весовую реакцию FI изделия на известном плече S .
(расстояние между опорами 2 и 3), по которой определяется проекция ai центра масс О на ось балки с отсчетом от оси X поворота опоры 2:
ai FiS
mg
где mg - вес изделия с массой т;
i - номер измерений.
Координаты центра масс как составляющие радиус-вектора г0 относительно системы координат изделия с началом в полюсе С определяются из системы линейных
уравнений вида
е r0 ai + ei ГА ,
где ei - орт горизонтальной оси балки в системе координат изделия (например, когда центры захватов лежат на одной горизонтали):
25
- гв - гд
ei ,
I гв - ГА I
ГА, гв - радиус-векторы центров захватов 12 и 13 (точек А и В) относительно полюса С (С - произвольная точка, связанная с изделием, относительно которой заданы радиус-векторы центров захватов). Для определения трех координат необходимы как минимум три измерения с различными расположениями изделия относительно горизонтальной оси балки устройства.
Погрешность 6 3 определения величины ai вследствие неточности установки изделия на устройстве определяется по формуле
5а, х
L+6L
v Гд, L+OL / Д 2
х 61(ттгг) ,
где Л - погрешность установки каретки (ошибка в определении расстояния R - проекции расстояния между опорами 2 и 11 на горизонтальную ось балки устройства; отно- шение Ак c,L,R является величиной первого порядка малости);
L - длина штанги 10 (от центра захвата до оси балки);
д L - погрешность определения L, у - угол между горизонтальной осью
балки и линией, соединяющей центр захвата 12 (точка А) с центром масс изделия;
с - расстояние между центром захвата 12 (точка А) и центром масс изделия.
Относительно погрешности установки каретки А величина д В является величиной второго порядка малости, - этим обеспечена более высокая точность измерений, чем на известных устройствах. Точность также увеличивается при уменьшении величины у посредством регулировки дяин штанг {с выводом центра масс на одоу горизонтально с точкой А) и повторных измерений. Возможность изменения длин метен г позволяет также сократить количество переустановок изделия на устройстве с трех до двух. Благодаря универсальной конструкции захватов устройство имеет расширенные эксплуатационные возможности и позволяет определять координаты центра масс изделий сложной формы. Устройство имеет небольшой поперечный гвбарит (плоскую форму) и небольшую массу.
Формула изобретения 1. Устройство для определения коор- динат центра масс изделия, содержащее основание с шарнирными опорами, установленную на них платформу с направляющими для закрепления изделия, каретку и уравновешивающий ее противовес, установленные на направляющих с возможностью перемещения вдоль них, и весоизмерительный инструмент, размещенный под одной из опор, отличающееся тем, что, с целью повышения точности и расширения эксплуатационных возможностей, оно снабжено двумя вертикальными штангами, одна из которых неподвижно закреплена на платформе, а другая - подвижно на каретке, захватами, шарнирно закрепленными на свободных концах штанг с возмож- ностью поворота относительно трех взаимно-перпендикулярных осей и предназначенными для закрепления изделия, а центр поворота каждого захвата совмещен
с его центром масс и с продольной осью штанги, а платформа выполнена в виде горизонтальной балки,
2.Устройство по п.1, отличающее- с я тем, что вторая штанга установлена так,
что ее центр масс расположен в плоскости, параллельной плоскости платформы и проходящей через ось шарнира каретки.
3.Устройство поп.1,отяичающее- с я тем. что штанги регулируемы по длине.
4. Устройство по пп,1 и 3, отличающее с я тем, что оно снабжено противовесом, установленным на второй штанге подвижно в осевом направлении.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат центра масс изделия | 1990 |
|
SU1772636A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСУДОВ ДАВЛЕНИЯ НА АЭС | 1991 |
|
RU2012074C1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2000 |
|
RU2170325C1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| НАВЕСНАЯ ЛЮЛЬКА | 1992 |
|
RU2047713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| Автоматическая траверса | 2020 |
|
RU2749677C1 |
| Устройство для определения центра тяжести изделий | 1980 |
|
SU875227A1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2022 |
|
RU2791485C1 |

Использование: средство измерительной техники для машиностроительного производства и исследований в области точной механики, преимущественно для изделий сложной формы. Цель - повышение точности и эксплуатационных свойств. Сущность изобретения: в устройстве, содержащем основание с шарнирными опорами, установленную на них платформу с направляющими для закрепления изделия, каретку и уравновешивающий ее противовес установленные на направляющих с возможностью перемещения вдоль них и Изобретение относится к машиностроению, точной механике, измерительной технике и преимущественно может быть использовано для определения координат центра масс изделий сложной формы. Известно устройство для определения центра тяжести тел сложной конфигурации, содержащее раму, укрепленную на горизонтально расположенном валу, вращающемся в опорах, ось которого лежит в-плоскости весоизмерительный инструмент, размещенный под одной из опор, платформа выполнена в виде горизонтальной балки с двумя вертикальными штангами, одна из которых фиксирована относительно основания неподвижно, а вторая закреплена шарнирно на каретке, штанги на свободных концах снабжены шарнирно закрепленными с возможностью поворота относительно трех взаимно перпендикулярных осей захватами, предназначенными для закрепления изделия, причем центр поворота каждого захваУа совмещен с центром его масс и с продольной осью штанги. С целью дополнительного увеличения точности центр масс второй штанги выведен в точку пересечения ее продольной оси с осью ее на шарнире каретки, вводится возможность регулировки длины штанг, установка подвижного противовеса на второй штанге. Положительный эффект: снижение влияния неточности установки изделия и параметров устройства «а результаты измерений до величины второго порядка малости, возможность измерения координат центра масс изделий сложной формы, небольшой поперечный габарит и относительно небольшая масса устройства. 3 з.п.ф-лы, 2 ил. рамы, причем на противоположных поверхностях рамы параллельно одна другой укреплены плиты одинакового веса, связанные со средством, обеспечивающим их синхронное перемещение в противоположные стороны в направлении, перпендикулярном оси вала. Устройство постоянно центрировано относительно опор благодаря применению подвижных противовесов (плит) и позволяет перемещать тело (изделие) относительно опор. VI VI Ю о со ел
.
(О
| Устройство для определения центра тяжести тел | 1972 |
|
SU657292A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Устройство для определения координат центра тяжести изделий | 1976 |
|
SU658417A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ И КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ МОДЕЛЕЙ СУДОВ | 1967 |
|
SU214176A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
