Изобретение относится к приборостроению, в частности к способам неразрушающего контроля пьезокерамических преобразователей, и может быть использовано при определении дефектов в активных элементах и блоках пьезокерамических преобразователей.
Известен способ дефектоскопии пьезокерамических преобразователей, заключающийся в том, что в контролируемом пьезокерамическом преобразователе возбуждают механические колебания переменным электрическим полем двух частот в области резонанса частотной характеристики пьезокерамического преобразователя, измеряют амплитуду механических колебаний на резонансной частоте, а о качестве пьезопреобразователя судят, сравнивая амплитуду этой резонансной гармоники с эталонным значением (значением, измерен- ным на эталонном образце).
Основным недостатком этого способа контроля пьезопреобразователей является низкая точность и достоверность, так как в способе предлагается контролировать мно- горезонансную колебательную систему (какой и является пьезопреобразователь) с помощью только одной резонансной гармоники, уровень которой мало чувствителен к наличию в контролируемом пьезопреобра- зователе дефектов различного характера. К недостаткам следует также отнести неопределенность и неоднозначность в выборе оп- тимальных частот возбуждающего электрического поля, поскольку контроли- руемые преобразователи имеют разброс резонансных частот, и отсутствие однозначной физической интерпретации уровня разностной гармоники и его связь с параметрами контролируемого преобразо- вателя.
Известен также способ контроля пьезокерамических преобразователей, заключающийся в том, что в контролируемом преобразователе возбуждают свободные колебания импульсным электрическим полем, регистрируют эти свободные затухающие колебания и по форме их огибающей по сравнению с эталонной судят о целостности активного пьезоэлемента.
Основными недостатками данного способа являются низкая точность и достоверность контроля, связанная с тем, что при таком контроле преобразователей анализируются лишь амплитуда затухающих про- цессов и общее время затухания и принципиально невозможно проанализировать тонкую структуру свободных колебаний, содержащую наибольшую информацию о качестве и параметрах контролируемых
пьезокерамических преобразователей, определяющих их качество. Это ведет к потере полезной информации и снижает точность и достоверность контроля, Кроме того, к недостаткам также следует отнести большую длительность контрольно-измерительных операций.
Наиболее близким к изобретению является способ контроля пьезокерамических преобразователей, в одновременном возбуждении контролируемого и эталонного пьезокерамических преобразователей белым электрическим шумом с частотным диапазоном от 0,1 fp до 10 fp, где fp - основная резонансная частота контролируемого преобразователя, причем определение степени идентичности эталонного и контролируемого преобразователей осуществляют по максимуму коэффициента взаимной корреляции шумовых откликов этих преобразователей.
Недостатком известного способа является его недостаточно высокая достоверность контроля вследствие того, что решение об идентичности контролируемого преобразователя по одному информативному признаку, который интегрально учитывает наличие в нем различных дефектов, приводящих к изменению (по сравнению с эталонным) в основном его модуля упругости. Кроме того, техническая реализация известного способа затруднительна в связи с тем, что предполагает необходимость создания двухканального устройства, сигналы в котором должны быть статистически зависимы и иметь гальваническую развязку.
Целью изобретения является повышение достоверности контроля.
Поставленная цель достигается тем, что согласно способу контроля пьезокерамического преобразователя возбуждают эталонный и контролируемый преобразователи электрическим белым шумом с частотным диапазоном от 0,1 трдо 10fp. где fp-частота основного резонанса эталонного преобразователя, измеряют параметры сигналов отклика преобразователей и с их помощью определяют качество контролируемого преобразователя, в качестве измеряемых параметров используют коэффициенты авторегрессии двух первых отсчетов нормированных автокорреляционных функций сигналов отклика преобразователей, а качество контролируемого преобразователя определяют по величине
R -J(ai-ai)2 + (a2-a2)2,
где ai, 32 - коэффициенты авторегрессии двух первых отсчетов нормированной автокорреляционной функции сигнала отклика контролируемого преобразователя;
ai, 32 - коэффициенты авторегрессии двух первых отсчетов нормированной автокорреляционной функции сигнала отклика эталонного преобразователя.
Шумовые отклики на выходе эталонного и контролируемого преобразователей характеризуются своими статистическими характеристиками, которые, в свою очередь, определяются упругопьезодиэлектрически- ми параметрами и техническим состоянием преобразователей.
При возбуждении преобразователей белым электрическим шумом их шумовые отклики представляют собой стационарный случайный процесс. Возможен различный подход к оценке статистических характеристик этих откликов. В известном способе оценивалось значение функции взаимной корреляции шумовых откликов эталонного и контролируемого преобразователей при нулевом временном сдвиге, которое выражается через неидентичность их модулей упругости. При этом имелась возможность оценивать неидентичность преобразователей по модулям упругости и наличию в них таких дефектов, которые могут привести к изменению в основном их упругих свойств. .
При оценке статистических характеристик шумовых откликов преобразователей с помощью модели авторегрессии достаточно использовать только два первых отсчета ,/52 нормированной автокорреляционной функции (НАКФ) для определения коэффициентов авторегрессии преобразователя
Р1 (1 Pi}-Р2-/3
Я , aiп
1 -р
Коэффициенты авторегрессии определяются, в свою очередь, всеми параметрами, характеризующими колебательную систему преобразователя р./ус
ut 2-е-С05
ai
0)
V
p-ut
асГ-е где m - масса пьезопреобразователя;
С - гибкость пьезопреобразователя;
г-сопротивление внутреннего вязкого трения;
At - временной сдвиг между отсчетами нормированной автокорреляционной функции откликов преобразователей.
Таким образом, используя только два первых отсчета НАКФ, имеется возможность определения коэффициентов авторегрессии ai, аа, содержащих информацию о
всей совокупности упругопьезоэлектриче- ских параметров контролируемого и эталонного преобразователей.
Для оценки идентичности контролируемого и эталонного преобразователей одновременно по двум признакам, какими являются коэффициенты авторегрессии ai и 32, значения этих коэффициентов рассматриваются как координаты двухмерных векторов, расстояние R между которыми, являясь мерой близости этих векторов, позволяет контролировать идентичность пье- зопреобразователей и вычисляется по формуле
.
R
2 (a(-ai)2
-J(ai-ai)2 + (a2-a2)2. .(3)
20 Далее принятие решения о наличии дефектов в контролируемом преобразователе осуществляется путем сравнения величины заранее экспериментально установленного порогового значения RO и значения R, еоот25 ветствующего конкретному контролируемому преобразователю. Пороговое значение RO является статистическим значением и определяется на основании экспериментальных данных для данной партии преобразоЗо вателей. Значение RO может изменяться в зависимости от статистических свойств результатов измерений и уровня требуемой достоверности безошибочного контроля. Авторегрессионный анализ в совокуп35 ности с другими операциями, например, ис- пользуетсядляопределения
допплеровского смещения в радиолокационных сигналах. В данной задаче авторегрессионный анализ в совокупности с
2JQ другими операциями применяется для получения оценок спектральных плотностей ра- диолокационных сигналов с целью определения скорости и направления движения цели.
45 В известных технических решениях авторегрессионный анализ используется для определения статистических связей между случайными величинами, а в заявляемом способе с его помощью проводят оценку
50 идентичности пьезопреобразователей .одновременно по всему комплексу упругопье- зодиэлектрических . параметров, обусловливающих характеристики колебательной системы преобразователя, что в со55 четании с методикой вынесения решения о наличии дефектов в преобразователе одновременно по двум интегральным коэффициентам ai, 32 позволяет повысить . достоверность контроля.
На чертеже представлена структурная схема, реализующая заявляемый способ.
Способ контроля пьезокерамических преобразователей осуществляется следующим образом.
С помощью генератора 1 белого элект- .рического шума с диапазоном частот от 0,1 fp до 10 fp, где fp - частота основного резонанса эталонного преобразователя, возбуждают последовательно в эталонном 2 и контролируемом 3 преобразователях за счет обратного пьезоэффекта упругое шумовое поле. Прохождение и отражение каждой из гармоник упругого шумового поля в материале преобразователя зависит от конструкции преобразователя, наличия в нем различных дефектов, изменения упругих и электрофизических параметров преобразователя. Далее результат суммарного взаимодействия этих гармоник из-за прямого пьезоэффекта преобразуется на выходе преобразователей в шумовой сигнал отклика. Этот шумовой отклик является информативно насыщенным, поскольку имеет большой набор гармонических составляющих (часть из них будет подавлена из-за узкополосности частотной характеристики пьезопреобразователя), и в нем в виде значений статистических характеристик содержится информация о наличии дефектов в контролируемом пьезокерамическом преобразователе.
Шумовые отклики эталонного и контролируемого преобразователей последовательно подаются в блоки измерения первых двух отсчетов их НАКФ,.где производится измерение двух отсчетов НАКФрт и pi шумовых откликов эталонного и контролируемого преобразователей. В качестве блока измерения отсчетов НАКФ может быть использован, например, коррелометр типа Х6- 8. Причем частота выборки fe отсчетов определяется частотой основного резонанса fp контролируемого преобразователя и должна быть не менее 20 fp. Такая степень дискретизации определяется теоремой Ко- тельникова исходя из верхней частоты возбуждающего шумового сигнала, равной 10 fp. Временной сдвиг между отдельными отсчетами определяется частотой выборки и должен быть не менее 1 /fp. При этом значение нулевого отсчета РО (соответствующее нулевому временному сдвигу при оценке НАКФ) всегда будет равно единице.
Значения двух отсчетов НАКФ pi л р% последовательно для шумовых откликов эталонного и контролируемого преобразователей далее поступают в блок 5 определения коэффициента авторегрессии, где
производится определение коэффициентов авторегрессии шумовых откликов последовательно для эталонного ai, 32 и контролируемого at, 32 преобразователей. Определение коэффициентов авторегрессии осуществляется в блоке 5 в соответствии с выражением (1).
При этом для определения коэффициентов авторегрессии ai, aa используется от0 счеты НАКФ шумового отклика эталонного преобразователя, а при определении коэффициентов авторегрессии ai, 32 - отсчеты НАКФ шумового отклика контролируемого преобразователя. Учитывая последователь5 ную схему контроля, определение значений ai, 32 для эталонного преобразователя производится однократно и далее используется в процессе контроля преобразователей для всей партии. Таким образом, на выходе
0 блока 5 формируются два вектора коэффициентов авторегрессии: {ai, - вектор значений, соответствующий эталонному преобразователю и {аь 32} - вектор значений, соответствующий контролируемому
5 преобразователю. В блоке 6 определения расстояния между векторами определяется величина R в соответствии с вырэжением(3). Вырэжение(3) геометрически предстэвляет собой расстояние между двумя векторами
0 на плоскости.Таким образом, значение расстояния R определяет меру близости двух векторов.
Далее в блоке 7 вынесения решения о наличии дефектов устанэвливается наличие
5 дефектов в контролируемом преобразователе по превышению измеренного значения величины R заданного порогового значения RO, формируемого пороговым устройством 8. Причем для каждой партии преобразова0 телей в зависимости от составз эктивного материалз, типа колебательной системы и ее назначения априорно устэнавливают максимэльно допустимое.пороговое значение RO, при котором контролируемый преоб5 разователь может соответствовать эталонному и характеризоваться отсутствием в нем дефектов. Если в процессе контроля измеренное значение R RO, то контролируемый преобразователь соответ0 ствует эталон ному, в нем нет дефектов, если R RO, то контролируемый преобразователь признается дефектным.
Формула изобретения Способ контроля пьезокерамич еских
5 преобразователей, заключающийся в том, что возбуждают эталонный и контролируемый преобразователи электрическим белым шумом с частотным диапазоном от 0,1 fp до 10 fp, где fp - частота основного резонанса эталонного преобразователя, измеряют параметры сигналов отклика преобразователей и с их помощью определяют качество контролируемого преобразователя, отл и- чающийся тем, что, с целью повышения достоверности контроля, в качестве измеряемых параметров используют коэффициенты авторегрессии двух первых отсчетов нормированных автокорреляционных функций сигналов отклика преобразователей, а качество контролируемого преобразователя определяют по величине R
R (ai-ai)2 + (a2-a2)2, где ai, 32 - коэффициенты авторегрессии двух первых отсчетов нормированной автокорреляционной функции сигнала отклика контролируемого преобразователя;
- коэффициенты авторегрессии двух первых отсчетов нормированной автокорреляционной функции сигнала отклика эталонного преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля пьезокерамических преобразователей | 1985 |
|
SU1280528A1 |
| Способ неразрушающего контроля пьезокерамического преобразователя | 1989 |
|
SU1753626A1 |
| Способ неразрушающего контроля пьезокерамического преобразователя | 1986 |
|
SU1525950A1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ИЗДЕЛИЙ ИЗ КРУПНОЗЕРНИСТЫХ МАТЕРИАЛОВ И УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ ИЗ КРУПНОЗЕРНИСТЫХ МАТЕРИАЛОВ | 1992 |
|
RU2039979C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА МАТЕРИАЛА | 2003 |
|
RU2246724C1 |
| Способ определения сигнала от стенки трубы по данным ВИП CD статистики энергетических линий | 2018 |
|
RU2690975C1 |
| Ультразвуковой дефектоскоп для контроля качества крупнозернистых материалов | 1986 |
|
SU1392498A1 |
| СИСТЕМА АНАЛИЗА СЕТЕВОГО ТРАФИКА | 2007 |
|
RU2364933C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| Способ определения относительной частоты колебаний лопаток турбомашин | 1981 |
|
SU1013766A1 |
Изобретение относится к приборостроению, в частности к способам неразрушающего контроля пьезокерамичёских преобразователей. Целью изобретения является повышение достоверности контроля за счет учета информации о всей совокупности упругопьезодиэлектрических параметров контролируемого и эталонного преобразователей. С помощью генератора 1 возбуждают эталонный и контролируемый преобразователи 2 и 3 электрическим белым шумом. Шумовые сигналы отклика преобразователей 2 и 3 подаются в блок 4 измерения первых двух отсчетов их нормированных функций автокорреляции. С выхода блока 4 сигнал поступает в блок 5, где производится определение коэффициентов авторегрессии двух первых отсчетов нормированной автокорреляционной функции. Затем в блоке 6 проводятся определенные математические операции над полученными коэффициентами. В блоке 7 принимается окончательное решение о качестве контролируемого преобразователя 3 путем сравнения полученной величины с критическим значением, заданным в пороговом устройстве 8. 1 ил. (Л С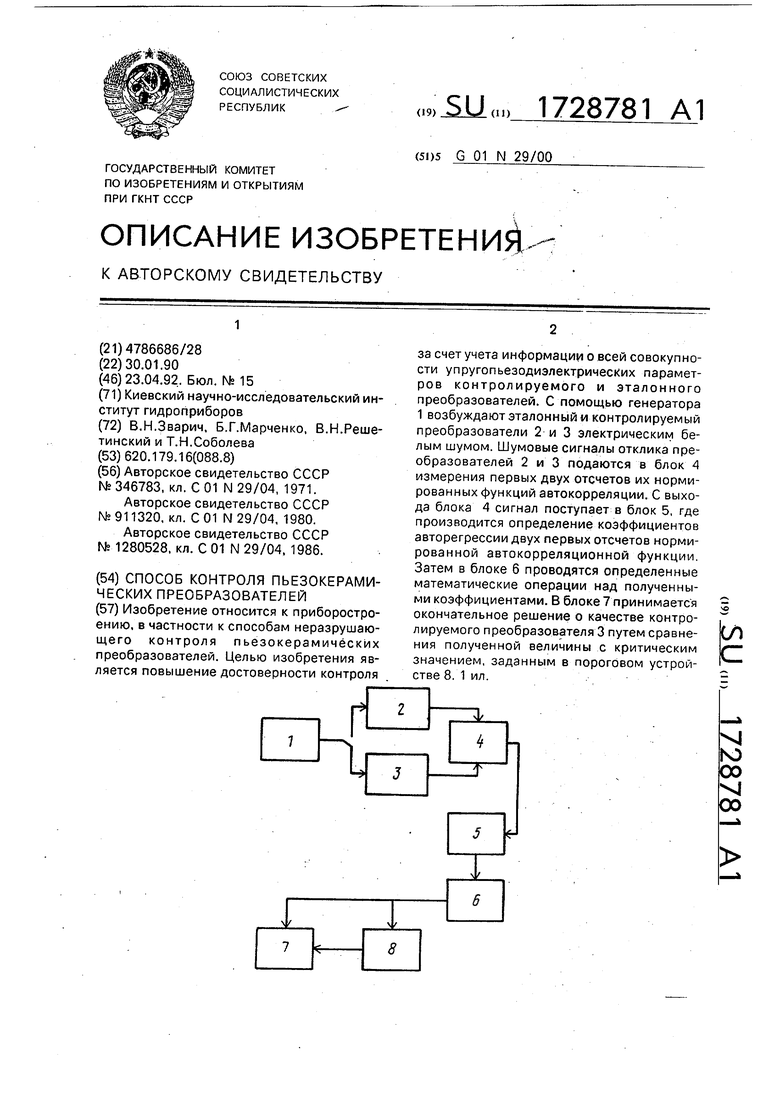
| СПОСОБ КОНТРОЛЯ МЕХАНИЧЕСКОЙ ЦЕЛОСТНОСТИ | 0 |
|
SU346783A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ дефектоскопии пьезокерамических преобразователей | 1980 |
|
SU911320A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ контроля пьезокерамических преобразователей | 1985 |
|
SU1280528A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
