Изобретение относится к способам электроизмерений и может быть использовано при электромагнитных обследованиях коррозионного состояния подземных трубопроводов.
Целью изобретения является повышение точности измерения за счет снижения погрешностей от неточной взаимной ориентации датчиков.
Поставленная цель достигается тем, что при определении постоянного тока в цилиндрических металлопроводах способом, включающим возбуждение в металлопроводе переменного и постоянного тока, определение расположения металлопровода по по- лю, созданному переменным током, измерение напряженности постоянного магнитного поля в точках, симметричных относительно плоскости, проходящей через ось металлопровода параллельно магнитному полю Земли, которые определяются по минимуму распределения компонент переменного поля, и вычисление постоянного тока в металлопроводе, согласно изобретению, измеряют модули векторов магнитного поля в двух точках, расположенных на взаро
имном удалении, равном удвоенному расстоянию между осью трубопровода и базой точек наблюдения, а значение постоянного тока определяют по формуле ,яа()
(1)
V
Z2 +H2sin2
Гт
.«м(1--)
где Hi, Н2 - модули векторов напряженности магнитного поля в точках измерения,
а - положение базы (расстояние между точками измерения),
гт - радиус трубопровода,
Z,H - вертикальная и горизонтальная составляющие магнитного поля Земли,
ее м - магнитный азимут трубопровода в месте измерения.
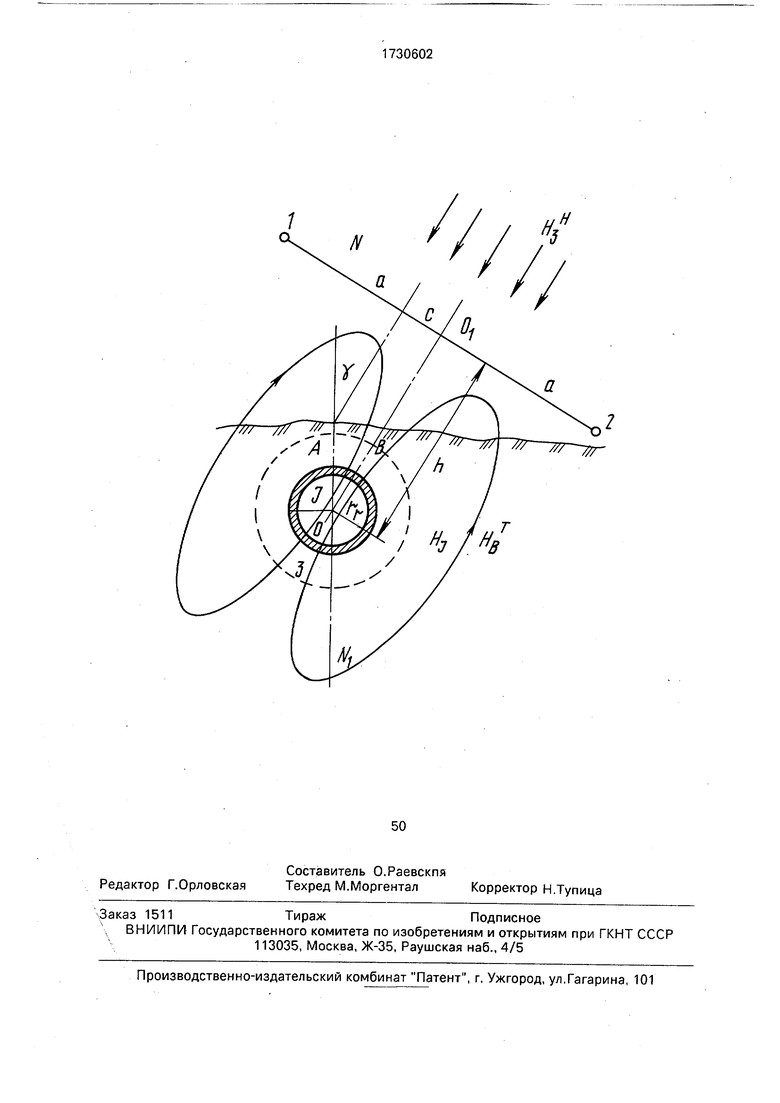
Предлагаемый способ поясняется схемой, представленной на чертеже,
Датчики 1 и 2, установленные на раздвижной базе (2а), размещаются над трубопроводом 3 с током I, Стрелками показаны намагничивающая трубопровод составляющая магнитного поля Земли Нз , ортогональная оси трубопровода, вторичное поле трубопровода Н в и поле тока Hi. Датчики 1 и 2 размещаются на линии, ортогональной плоскости, проходящей через ось трубопровода и радиальную прямую 00т, совпадающую с направлением намагничивающей составляющей поля Земли Н нз. Расстояния а от датчиков до этой плоскости выбраны равными h - расстоянию по радиальной прямой от оси трубопровода до линии, на которой размещены датчики 1 и 2.
Пример реализации способа.
Известным образом, используя переменную составляющую тока, по вертикальной компоненте поля определяют трассу газопровода, По компасу вдали от газопровода (на расстоянии 15-20 м) находят угол отклонения оси газопровода от магнитного меридиана - магнитный азимут сем .Угол у между вертикалью NNi и составляющей магнитного поля Н з находят, используя известные значения вертикальной Z и горизонтальной Н составляющих поля Земли для данного региона. Вычисляют его по формуле
LJ
y arctg -j sin ам (2)
Измерительную штангу, ортогональную базе датчиков 1 и 2, устанавливают в точке А на трассе газопровода и поворачивают ее на угол у в плоскости, ортогональной трассе. Перемещают штангу в этой плоскости параллельно самой себе до точки В, в которой она совпадает с радиальной прямой
10
15
20
25
30
35
40
45
OO-i (это положение штанги соответствует минимуму показаний датчика оси, ориентированного так, что ось чувствительности его направлена вдоль штанги). При таком положении штанги по известной методике с помощью двух индуктивных датчиков, укрепленных на этой штанге и ориентированных на прием тангенциальных составляющих переменного поля, определяют расстояние h от точки С до оси газопровода. Раздвигают обе половины базы, перпендикулярной штанге, на расстояние а h и с помощью двух идентичных датчиков, попадающих после выполнения указанных операций в точки 1 и 2, измеряют модули векторов напряженности магнитных полей Hi и Н2. По формуле (1) определяют значение тока I в газопроводе.
Предложенная математическая формула выводится из следующих соображений.
Для модулей векторов напряженности магнитного поля в точках наблюдения 1 и 2, с учетом направлений, параллельных (X) и ортогональных (У) базе составляющих, для поля измеряемого тока НХ1, НХ2, Hyi, НУ2 и поля намагничивания трубы Xi, Х2, Ут, У2 соответственно имеют место выражения
(Hxi +xi)2 +(H vi -у 1 f (2.1)
/Н2/ V(Hx2-x2)2+(HY2-Y2)2 (2.2)
отсюда, используя симметрию поля Hxi
Нха Нх..., Y1 V2 Y получают
Н21-Н22 4Нх x-4HyY(2.3)
Поле тока Н 1/2 л г в точках ( ± а,п) при
а h имеет составляющие
НХ (24)
Для магнитного поля трубопровода, намагничиваемого однородным полем Ннз, перпендикулярным оси трубы, авторами были получены соотношения
X -2 Н ,
Y нЈ 51 ,
(2.5)
50
где г Vx 2 + у ; х, у - координаты относительно центра трубы,
5
Л- (1-5я2Нл2-Пя Г2.
(2.6)
( + 1))2 S rTi/rr - отношение внутреннего и внешнего радиусов трубы;
/г - относительная магнитная проницаемость материала трубы. При х у а, согласно (2.5), имеем
х Нз А/2а2, у -ННз(2.7)
Подставляя (2.4) и (2.7) в (2.3), получаем
А
( ) (2.8)
2 а
(2.9)
Отсюда , яа(Н -Н22)
ну(,-)
Составляющая геомагнитного поля, ортогональная оси1Вубьь
Ннз Vz2 + H2sinaM(2.10)
где Z и Н - вертикальная и горизонтальная составляющие геомагнитного поля, а м - магнитный азимут трубопровода.
Для стального трубопровода ,и 1 (практически ,д А.ЗОО), что позволяет вместо (2,6) с достаточной точностью принять
А г2т(2.11)
Тогда из (2.9) получаем следующую формулу для определения тока
ЧtaK-hll
Го-5П Р (2.12)
Использование предлагаемого способа позволяет бесконтактным методом определить величину и распределение постоянного тока электрохимзащиты вдоль подземных нефте- и газопроводов большого диаметра. Это дает возможность обнаруживать места повреждений изоляции этих трубопроводов и находить анодные зоны, которые однозначно определяют места коррозии, Реализация способа дает возможность улучшить качество коррозионных обследований подземных трубопроводов, что позволит повысить надежность их работы.
Преимущество предложенного способа по сравнению с прототипом состоит в том, что он исключает трудоемкие операции по строгой ориентации измерительных датчиков, так как измеряется модуль полного вектора магнитного поля. Это обеспечивает более высокую разрешающую способность
за счет снижения погрешностей от неточной ориентации магниточувствительных преобразователей. Снижению погрешностей способствует также симметричное, в отличие от
5 прототипа, расположение двух точек измерения отнсоительно вторичного поля трубопровода, являющегося источником магнитных помех.
Формула изобретения
10 Способ определения постоянного тока в цилиндрических металлопроводах, включающий возбуждение в металлопроводе переменного и постоянного тока, определение месторасположения металлопрово15 да по полю, созданному переменным током, измерение напряженности постоянного магнитного поля в точках, симметричных относительно плоскости, проходящей через ось металлопровода па20 раллельно магнитному полю Земли, которые определяются по минимуму распределения компонент переменного поля, и вычисление постоянного тока в металлопроводе, отличающийся тем,
25 что, с целью повышения точности измерения за счет снижения погрешности взаимной ориентации датчиков, измеряют модули векторов магнитного поля в двух точках, расположенных на взаимном удалении, рав30 ном удвоенному расстоянию между осью металлопровода и базой точек измерения, а значение постоянного тока определяют по
О 2
. +Н 5ЫИМ
(
,L-
г
где Hi, На - модули векторов напряженности магнитного поля в точках измерения;
a - половина базы (расстояния между точками измерения);
гт - радиус металлопровода;
Z,H - вертикальная и горизонтальная составляющие магнитного поля Земли;
ам - магнитный азимут трубопровода в месте измерения.
Н
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля протяженных цилиндрических металлопроводов | 1986 |
|
SU1363080A1 |
| Способ определения тока в подземном токопроводе бесконтактным методом | 1987 |
|
SU1503020A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ИНКЛИНОМЕТРИИ В ПРОЦЕССЕ БУРЕНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2758931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
| СПОСОБ ИНДУКТИВНОЙ АЭРОЭЛЕКТРОРАЗВЕДКИ | 1967 |
|
SU197031A1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2177630C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ И НАПРАВЛЕНИЯ НА ЛИНИЮ ЭЛЕКТРОПЕРЕДАЧИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2316790C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2014 |
|
RU2568986C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
Изобретение относится к способам электроизмерений и может быть использовано при электромагнитных обследованиях коррозионного состояния подземных трубопроводов. Цель изобретения - повышение точности измерений за счет снижения погрешностей от неточной взаимной ориентации датчиков при измерении модулей векторов магнитного поля, Способ определения постоянного тока в цилиндрических металлопроводах включает возбуждение в металлопроводе переменного и постоянного тока, определение расположения металло- провода по полю, созданному переменным током, измерение напряженности постоянного магнитного поля в точках, симметричных относительно плоскости, проходящей через ось металлопровода параллельно магнитному полю Земли, которые определяются по минимуму распределения компонент переменного поля, и вычисление постоянного гока в металлопроводе, измерение модулей векторов магнитного поля в двух точках, расположенных на взаимном удалении, равном удвоенному расстоянию между осью трубопровода и базой точек наблюдения, а значение постоянного тока определяют по математической формуле, приведенной в описании изобретения. 1 ил.
| Способ контроля протяженных цилиндрических металлопроводов | 1986 |
|
SU1363080A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для бесконтактного измерения токов в подземных магистральных трубопроводах | 1985 |
|
SU1308905A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка № 4463426/21 1/9, 27.06.89 прототип. | |||
