Изобретение относится к технике систем для предотвращения столкновений летательного аппарата (ЛА) с элементами линии электропередачи (ЛЭП) и может быть применено для повышения безопасности полетов ЛА.
Задача обнаружения ЛЭП с борта ЛА является весьма актуальной в связи с участившимися авариями ЛА, связанными со столкновением с ЛЭП.
Известен способ обнаружения ЛЭП, основанный на приеме УКВ электромагнитных колебаний, генерируемых ЛЭП, при помощи нескольких антенн, расположенных на борту ЛА (RU 2156985 С2, МПК 7 G01S 13/93, G08G 5/04, 27.09.2000). Применение данного способа сдерживается сложностью практической реализации на борту ЛА, требующей установки нескольких разнесенных устройств.
Наиболее близким по технической сущности и достигаемому результату к настоящему изобретению является способ определения кратчайшего расстояния до высоковольтной ЛЭП с борта ЛА (RU 2260198 С2, МПК 7 G01S 13/93, G08G 5/04, 20.12.2005), заключающийся в измерении ортогональных компонент модуля напряженности электрического поля промышленной частоты на борту ЛА, пересчете измеренных компонент в земную систему координат, расчете направления и кратчайшего расстояния до ЛЭП по предлагаемым формулам, использующим вертикальную компоненту напряженности электрического поля, измеряемую на борту ЛА.
Недостатками способа прототипа является низкая точность определения дальности и направления на ЛЭП в связи с зависимостью пространственного распределения электрического поля, создаваемого ЛЭП, от ландшафта подстилающей поверхности, а так же в связи с отсутствием учета высоты подвески проводов ЛЭП над поверхностью земли.
Искажение пространственного распределения силовых линий электрического поля вокруг ЛЭП по сравнению с распределением в свободном пространстве обусловлено существенным отличием диэлектрической проницаемости воздуха и почвы. Так, диэлектрическая проницаемость воздуха составляет величину εв≈1,0006, а для почвы достигает εп=30 и зависит от содержания влаги (см. Кухлинг X. Справочник по физике: Пер. с нем. - М.: Мир, 1983. - С.476, табл.41).
Задача, на решение которой направлено данное изобретение, заключается в обнаружении ЛЭП с борта ЛА с характеристиками, обеспечивающими снижение вероятности столкновения ЛА с ЛЭП.
Технический результат, достигаемый при использовании настоящего изобретения, заключается в повышении точности определения кратчайшего расстояния и направления на ЛЭП.
Поставленная задача с достижением упомянутого выше технического результата решается тем, что предложен способ определения кратчайшего расстояния и направления на ЛЭП с борта ЛА, заключающийся в том, что на борту летательного аппарата (ЛА) измеряют в связанной системе координат взаимно ортогональные компоненты B1, B2, В3 вектора индукции магнитного поля промышленной частоты, пересчитывают их в компоненты Вх, By, Bz вектора индукции магнитного поля в земной математической декартовой системе координат, совмещенной с направлением горизонтального движения ЛА, и по ним определяют азимут Z, угол места Е и кратчайшее расстояние D до ЛЭП по формулам:
Z=arctg(By/Bx)-(n-1)×(π/2);
Е=arcos(Bz/Bm)-(n-1)×(π/2);
D=(H-h)(Bm/Bh);
где
n=(Вm-Bmp)/abs(Bm-Вmp) - множитель для устранения неоднозначности отсчета направления на ЛЭП;
Вm=sqrt(Вх 2+By2+Bz2) - текущее значение модуля вектора индукции магнитного поля;
Bmp - значение модуля вектора индукции магнитного поля предыдущего измерения;
Вh=sqrt(Вх 2+By 2) - горизонтальная компонента вектора индукции магнитного поля в земной системе координат;
h=Нр-ctg(Ep)×(H-Нр+dD×ctg(E))/(ctg(E)-ctg(Ep)) - эффективная высота подвески проводов ЛЭП над поверхностью земли;
Н - текущее значение высоты полета ЛА над поверхностью земли;
Нр - значение высоты полета ЛА в момент предыдущего измерения;
Ер - значение угла места ЛЭП в момент предыдущего измерения;
dD=vh×Δt×cos(Z) - горизонтальное приближение вертолета в направлении ЛЭП;
vh - горизонтальная составляющая вектора скорости вертолета;
Δt - интервал времени между текущим и предыдущим измерениями.
Получение технического результата обусловлено тем, что для определения кратчайшего расстояния и направления на ЛЭП используется магнитное поле, создаваемое ЛЭП. Использование магнитного поля для измерений возможно за счет того, что в реальных условиях, определяемых действующими значениями разбалансов токов в проводах и разбалансов фазовых сдвигов между токами, силовые линии магнитного поля вокруг ЛЭП в дальней зоне приближаются к виду концентрических окружностей.
При этом за счет малого отличия магнитной проницаемости воздуха и земли магнитное поле практически не чувствительно к наличию и свойствам подстилающей поверхности. Магнитная проницаемость воздуха составляет всего лишь μв≈1.0000004, а для основных земных пород не превышает величины μп≈1.01 (см. Кухлинг X. Справочник по физике: Пер. с нем. - М.: Мир, 1983. С.476, табл.42; Магниторазведка: Справочник геофизика. / Под редакцией В.Е.Никитского, Ю.С.Глебовского. - М.: Недра, 1990. - С.378).
Таким образом, магнитные проницаемости воздуха и земли мало отличаются другу от друга в отличие от соответствующих электрических проницаемостей, поэтому подстилающая поверхность и погода гораздо слабее влияют на величину и распределение магнитного поля в пространстве, окружающем ЛЭП, по сравнению с электрическим полем.
Изобретение иллюстрируется чертежами, на которых изображено:
на фиг.1 - расположение силовых линий магнитного поля вокруг проводов ЛЭП, вызванных протеканием транспортного тока по проводам;
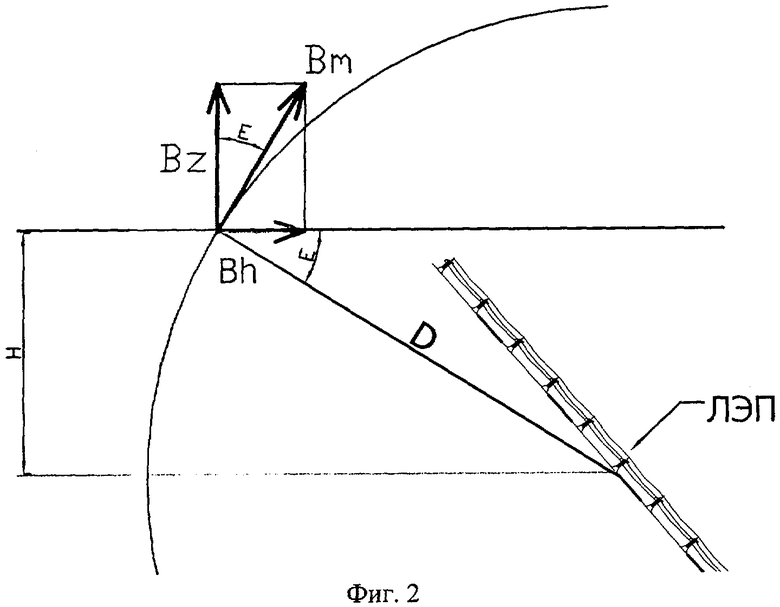
на фиг.2 - рисунок, иллюстрирующий геометрические соотношения для определения угла места ЛЭП;
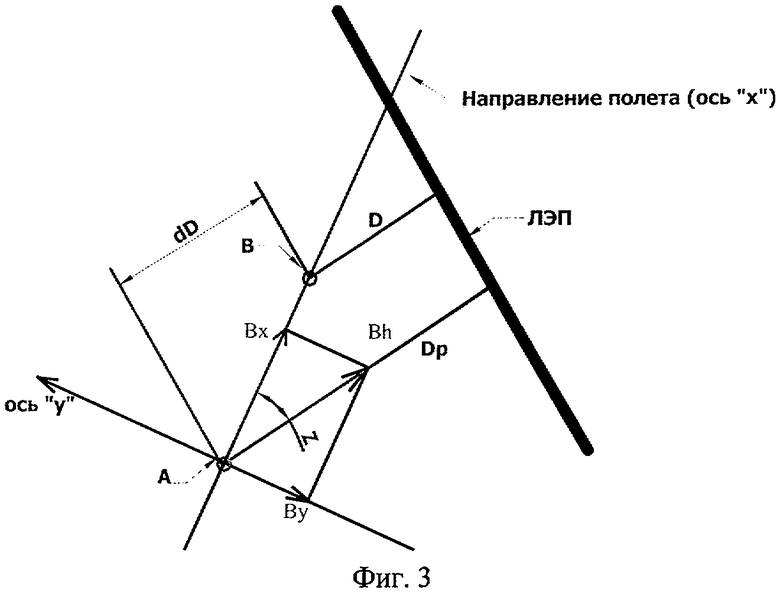
на фиг.3 - рисунок, иллюстрирующий геометрические соотношения для определения азимута и кратчайшего расстояния до ЛЭП;
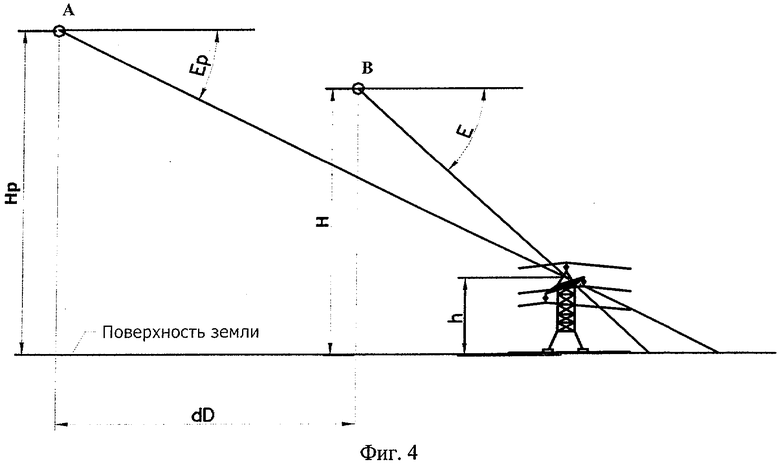
на фиг.4 - рисунок, иллюстрирующий геометрические соотношения для определения эффективной высоты подвески проводов ЛЭП над поверхностью земли.
В идеальном случае пространственного разнесения проводов с одинаковыми токами, напряжениями и фазами магнитное поле вокруг трехфазной ЛЭП имеет дипольное распределение. На практике такая ситуация практически никогда не выполняется, а имеет место разбаланс. Расчеты показывают, что при типичном разбалансе токов в 10% и фазовых сдвигов до 5° силовые линии магнитного поля вокруг ЛЭП в дальней зоне достаточно хорошо приближаются к виду концентрических окружностей (см. фиг.1). При этом величина индукции магнитного поля на дальности 1000 метров от ЛЭП достигает вполне измеряемой величины в единицы миллигаусс при среднем токе в фазе - 1000 ампер. Закон изменения индукции при удалении от ЛЭП мягче, чем D-2, и зависит от разбаланса ЛЭП.
Кратчайшее расстояние D до ЛЭП определяется по направлению перпендикуляра, проведенного от ЛА к проводам длинной ЛЭП (см. фиг.3). Направление на ЛЭП задается азимутом Z и углом места Е направления кратчайшего расстояния до ЛЭП (см. фиг.3 и фиг.4).
Способ осуществляют следующим образом.
На борту летательного аппарата (ЛА) измеряют в связанной системе координат взаимно ортогональные компоненты B1, В2, В3 вектора индукции магнитного поля промышленной частоты и пересчитывают их в компоненты Вх, By, Bz вектора индукции магнитного поля в земной математической декартовой системе координат, совмещенной с направлением горизонтального движения ЛА.
При этом ось "х" совпадает с направлением движения ЛА, ось "y" направлена влево по поверхности земли, ось "z" - вертикально вверх от поверхности земли (см. фиг.3). Для пересчета применяют значения курса, тангажа и скольжения ЛА, получаемые от бортовой навигационной системы. Стандартная процедура пересчета, основанная на использовании матрицы поворота на углы Эйлера, широко известна и описана (Справочник по математике (для научных работников и инженеров). Г.Корн, Т.Корн. - М.: Наука, 1973. - С.449-455).
По текущим значениям компонент Вх, By, Bz, измеренным в точке В, и их значениям, полученным в предыдущем измерении в точке А, вычисляют азимут Z, угол места Е и кратчайшее расстояние D до ЛЭП.
Азимут Z определяют из геометрических соотношений, приведенных на фиг.3, по формуле:
Z=arctg(By/Bx)-(n-1)×(π/2);
где n=(Вm-Bmp)/abs(Bm-Вmp) - множитель для устранения неоднозначности отсчета направления на ЛЭП, представляющий собой индекс нарастания модуля вектора индукции магнитного поля при перемещении из точки А в точку В и принимающий значение (+1) или (-1) при приближении или удалении от ЛЭП соответственно;
Вm=sqrt(Вх 2+By2+Bz2) - текущее значение модуля вектора индукции магнитного поля, измеренное в точке В;
Bmp - значение модуля вектора индукции магнитного поля предыдущего измерения, измеренное в точке А.
На фиг.2 приведено положение горизонтальной Вh=sqrt(Вх 2+By 2) и вертикальной Bz компонент вектора индукции магнитного поля в земной системе координат в точке нахождения ЛА над видимой внизу ЛЭП. Видно, что ЛА находится на концентрической силовой линии магнитного поля ЛЭП.
Угол места Е определяют из геометрических соотношений, приведенных на фиг.2, по формуле:
Е=arcos(Bz/Bm)-(n-1)×(π/2).
Кратчайшую дальность D до ЛЭП определяют из геометрических соотношений, приведенных на фиг.4, по формуле:
D=(H-h)(Bm/Bh).
Высота Н полета ЛА, измеряемая бортовым высотомером ЛА, определяется до поверхности земли и не учитывает высоту h подвески проводов ЛЭП, которая может достигать значительных величин. Учет эффективной высоты подвески проводов над поверхностью земли производится по формуле:
h=Нр-ctg(Ep)×(H-Нр+dD×ctg(E))/(ctg(E)-ctg(Ep)),
где
H - текущее значение высоты полета ЛА над поверхностью земли;
Нp - значение высоты полета ЛА в момент предыдущего измерения;
Ер - значение угла места ЛЭП в момент предыдущего измерения;
dD=vh×Δt×cos(Z) - горизонтальное приближение вертолета в направлении ЛЭП;
vh - горизонтальная составляющая вектора скорости вертолета;
Δt - интервал времени между текущим и предыдущим измерениями.
Чертежи, приведенные на фиг.3 и фиг.4, иллюстрируют получение указанных формул. На фиг.3 показаны два положения ЛА, соответствующих соседним измерениям магнитного поля, выполняемым на борту с частотой в единицы-десятки герц. Предполагается, что между соседними измерениями ЛА совершает прямолинейное движение. Боковыми ускорениями за столь малые времена пренебрегаем. Видно, что азимут Z направления кратчайшего расстояния на ЛЭП остается неизменным в ходе прямолинейного движения ЛА. Тогда из фиг.3 ясно, что горизонтальное перемещение ЛА в направлении кратчайшего расстояния до ЛЭП dD может быть определено из данной выше формулы.
Из фиг.4 видно, что две соседние точки наблюдения А и В (А - точка предыдущего измерения, В - точка текущего измерения) соединяются с поверхностью земли прямыми - линиями визирования, пересекающимися на вершине опоры ЛЭП, высоту которой и требуется определить. Очевидно, что решение системы из двух уравнений, описывающих обе линии визирования, даст координаты точки пересечения, одна из которых и является высотой подвески h проводов ЛЭП над поверхностью земли. Провисанием проводов в данном рассмотрении пренебрегаем.
Для точки А уравнение линии визирования на вершину опоры ЛЭП выглядит:
у′=-ctg(Ep)×х′+Нр.
Для второй точки соответственно:
у′=-ctg(E)×х′+Н+dD×ctg(E),
причем (см. фиг.4) ось "y′"направлена вверх, ось "х′" - вправо.
Решая систему уравнений, находим данное выше выражение для эффективной высоты h подвески проводов ЛЭП, учет которой позволяет существенно увеличить точность определения текущего кратчайшего расстояния до ЛЭП.
Заявляемый способ может быть осуществлен с помощью устройства, содержащего бортовой вычислитель, связанный с измерителем магнитного поля, адаптером бортовой вычислительной системы и индикатором. Измеритель магнитного поля (см., например, Ю.В.Афанасьев, Н.В.Студенцов, А.П.Щелкин. Магнитометрические преобразователи, приборы, установки. Энергия. Ленинградское отделение. 1972. - С.160-228) измеряет взаимно ортогональные компоненты B1, B2, В3 вектора индукции магнитного поля, необходимые для функционирования устройства. Адаптер бортовой навигационной системы формирует сигналы для ввода в бортовой вычислитель, которые отражают текущую ориентацию ЛА, высоту над уровнем земли и его горизонтальную скорость. Бортовой вычислитель принимает сигналы от измерителя магнитного поля и адаптера и рассчитывает кратчайшее расстояние и направление на ЛЭП по формулам, заявленным в настоящем изобретении. Индикатор предназначен для информирования экипажа ЛА о дальности и направлении на ЛЭП.
Оценка точности заявленного способа показывает, что при указанных выше величине транспортного тока и типичных разбалансах позиционирование ЛЭП на дальности 1000 метров может осуществляться со следующими погрешностями: по дальности - на уровне 10% от дальности, по азимуту - не более 5°, по углу места - не более 10°.
Приведенные величины являются достаточными для существенного снижения вероятности столкновения ЛА с элементами ЛЭП.
Предложенный способ определения кратчайшего расстояния и направления на ЛЭП с борта ЛА по магнитному полю, создаваемому ЛЭП, функционирует при полете ЛА над пересеченной местностью, где функционирование прототипа неэффективно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ ДО ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2260198C9 |
| Способ магнитной навигации подводного аппарата | 2024 |
|
RU2826188C1 |
| СПОСОБ И СИСТЕМА СОЗДАНИЯ СТВОЛА СКВАЖИНЫ В ПОЧВЕННОЙ ФОРМАЦИИ | 1995 |
|
RU2131975C1 |
| СПОСОБ ВЕКТОРНЫХ МАГНИТНЫХ ИЗМЕРЕНИЙ | 1991 |
|
RU2069374C1 |
| Способ создания космических конструкций на базе динамической гибкой связи | 1991 |
|
SU1819829A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2690526C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ МАГНИТНОГО ПОЛЯ В ПЕРЕХОДНОМ СЛОЕ В ОКРЕСТНОСТИ МЕРКУРИЯ | 2019 |
|
RU2723701C1 |
| Способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата | 2016 |
|
RU2610150C1 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2005 |
|
RU2302018C2 |
Изобретение направлено на повышение точности определения кратчайшего расстояния и направления на линию электропередачи (ЛЭП). Указанный технический результат достигается за счет того, что на борту летательного аппарата (ЛА) измеряют в связанной системе координат взаимно ортогональные компоненты B1, B2, В3 вектора индукции магнитного поля промышленной частоты, пересчитывают их в компоненты Вх, By, Bz вектора индукции магнитного поля в земной математической декартовой системе координат, совмещенной с направлением горизонтального движения ЛА, и по ним определяют азимут Z, угол места Е и кратчайшее расстояние D до ЛЭП по предложенным формулам, в которых учитывается текущее и предыдущее значения модуля вектора индукции магнитного поля, эффективная высота подвески проводов ЛЭП над поверхностью земли, а также ориентация ЛА, высота над уровнем земли и его горизонтальная скорость. 4 ил.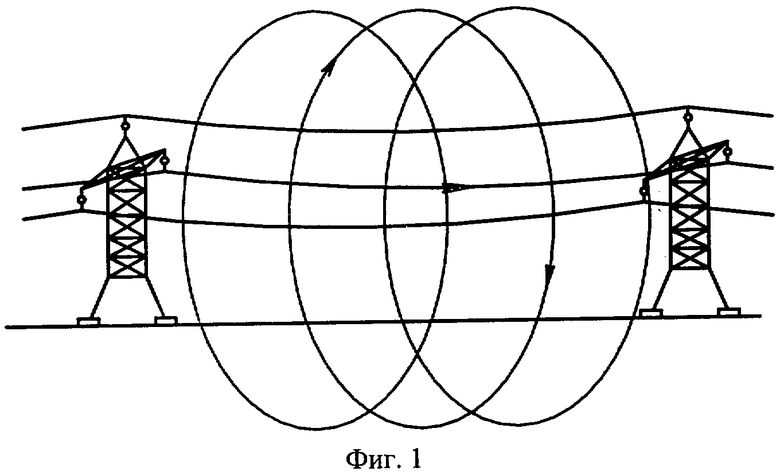
Способ определения кратчайшего расстояния и направления на линию электропередачи (ЛЭП) с борта летательного аппарата, заключающийся в том, что на борту летательного аппарата (ЛА) измеряют в связанной системе координат взаимно ортогональные компоненты B1, B2, В3 вектора индукции магнитного поля промышленной частоты, пересчитывают их в компоненты Вх, By, Bz вектора индукции магнитного поля в земной системе координат, совмещенной с направлением горизонтального движения ЛА, и по ним определяют азимут Z, угол места Е и кратчайшее расстояние D до ЛЭП по формулам
Z=arctg(By/Bx)-(n-1)·(π/2);
E=arcos(Bz/Bm)-(n-1)·(π/2);
D=(H-h)(Bm/Bh);
где n=(Bm-Bmp)/abs(Bm-Bmp) - множитель для устранения неоднозначности отсчета направления на ЛЭП;
Bm=sqrt(Bx 2+By2+Bz2) - текущее значение модуля вектора индукции магнитного поля;
Вmp - значение модуля вектора индукции магнитного поля предыдущего измерения;
Bh=sqrt(Bx 2+By 2) - горизонтальная компонента вектора индукции магнитного поля в земной системе координат;
h=Hp-ctg(Ep)·(H-Hp+dD·ctg(E))/(ctg(E)-ctg(Ep)) - эффективная высота подвески проводов ЛЭП над поверхностью земли;
Н - текущее значение высоты полета ЛА над поверхностью земли;
Нр - значение высоты полета ЛА в момент предыдущего измерения;
Ер - значение угла места ЛЭП в момент предыдущего измерения;
dD=vh·Δt·cos(Z) - горизонтальное приближение ЛА в направлении ЛЭП;
vh - горизонтальная составляющая вектора скорости ЛА;
Δt - интервал времени между текущим и предыдущим измерениями.
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ ДО ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2260198C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НА БОРТУ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО НОСИТЕЛЯ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ЗЕМЛИ И СОСТАВЛЯЮЩИХ ЕГО СОБСТВЕННОГО МАГНИТНОГО ПОЛЯ | 1994 |
|
RU2073891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА ИНДУКЦИИ МАГНИТНОГО ПОЛЯ В ИОНОСФЕРЕ ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169933C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1999 |
|
RU2176400C2 |
| US 4737788 A, 12.04.1988 | |||
| US 5677842 A, 14.10.1997 | |||
| Объемный лестничный блок | 1978 |
|
SU802469A1 |

