Изобретение относится к области магнитной съемки и может быть использовано для определения пространственного положения трубопровода на участке его подводного перехода, проложенного по дну, под слоем грунта дна, методом наклонно/горизонтально-направленного бурения.
Известен способ определения положения подводного трубопровода, при котором с помощью приемопередающей антенны гидролокатора бокового обзора, установленного на подводном носителе, в объем воды излучают акустические импульсы с заданным периодом зондирования и последовательно принимают эхо-сигналы обратного рассеяния от элементарных участков дна и оголенного участка трубопровода, измеряют времена распространения эхо-сигналов и вычисляют наклонные дальности до каждого озвученного участка, определяют границы зоны акустической тени от оголенного участка трубопровода, по данным промерного эхолота с учетом предварительно измеренного линейного смещения начал «приборной» и «судовой» систем координат определяют от стояние антенны гидролокатора бокового обзора от дна, отличающийся тем, что предварительно на специально оборудованном полигоне производят калибровку гидролокатора бокового обзора, определяя постоянные систематические ошибки по углу дифферента α, углу рыскания γ, углу крена θ и ошибки задержки между выдачей навигационных данных и приемом отраженных от дна эхо-сигналов, выйдя в рабочий район акватории, производят замер распределения скорости звука в воде, по которому корректируют наклонные дальности до каждого озвученного участка и границы зоны акустической тени от оголенного участка трубопровода, а во время съемки осуществляют запись координат положения и углов ориентации подводного носителя (угла дифферента β, угла курса ϕ, угла крена η) в мировой геодезической системе координат WGS-84, а координаты оси озвученного участка оголенного и провисшего трубопровода в «приборной» системе координат и его высотное положение относительно линии дна рассчитывают по формулам, а координаты озвученного участка подводного трубопровода в «судовой» системе координат с учетом линейного смещения начал «приборной» и «судовой» систем координат и с учетом постоянных систематических ошибок по углу дифферента α, углу рыскания γ, углу крена θ и ошибок задержки между выдачей навигационных данных и приемом отраженных от дна эхо-сигналов определяют на основе пространственных преобразований составляющих векторов, а затем с учетом координат положения и углов ориентации подводного носителя (угла дифферента β, угла курса ϕ, угла крена η) в системе координат WGS-84, а также положения оси озвученного участка подводного трубопровода в «судовой» системе координат на основе пространственных преобразований составляющих векторов определяют положение оси подводного трубопровода в мировой геодезической системе координат WGS-84 [1].
Недостатками способа являются:
высокая трудоемкость и стоимость, вызванная необходимостью использования дорогостоящего подводного автономного аппарата, а также предварительной калибровкой на полигоне гидролокаторов бокового обзора;
подверженность негативному влиянию «человеческого» фактора, вызванного необходимостью предварительной настройки и калибровки гидролокаторов бокового обзора;
определение пространственного положения трубопровода зависит от множества факторов, связанных с измерениями и расчетами параметров, связанных с определением «приборной» и «судовой» систем координат, что приводит к накоплению суммарной погрешности в измерениях;
ограничение, связанное с недоступностью применения при заложении трубопровода под грунтом дна;
косвенный подход при определении геодезических координат трубопровода в системе WGS-84, основанный на расчетном методе.
Известен способ морской магнитной съемки, включающий синхронное измерение модуля вектора индукции магнитного поля Земли (ВИМПЗ) при помощи двух скалярных магнитометров, размещенных в отдельных гондолах, определение градиента модуля ВИМПЗ и его интегрирование по пройденному пути, а также низкочастотную фильтрацию результатов интегрирования, отличающийся тем, что дополнительно измеряют модуль ВИМПЗ при помощи двух дополнительных скалярных магнитометров, размещенных в отдельных гондолах и буксируемых за судном таким образом, чтобы система из четырех магнитометров не находилась в одной плоскости, синхронно с измерениями модуля ВИМПЗ упомянутыми магнитометрами измеряют координаты этих магнитометров и в процессе совместной обработки магнитометрических данных и координат магнитометров определяют три ортогональные компоненты градиента модуля ВИМПЗ, а также приращение модуля ВИМПЗ относительно начальной точки измерения [2].
Недостатками способа являются:
невысокая точность измерения модуля ВИМПЗ и определения местоположения объекта съемки, причиной которой является сложность системы измерения координат гондол, основанной: в горизонтальной плоскости - на данных гидролокатора, два приемника которого размещены за кормой судна и разнесены по фронту перпендикулярно курсу судна; в вертикальной плоскости - на данных, полученных с датчиков глубины, которые размещаются в каждой гондоле;
ограничения в применении, связанные с волнением водной поверхности и наличием сильного поперечного ходу обследования течения воды.
Наиболее близким к предлагаемому техническому решению является способ диагностики технических параметров подземного трубопровода, включающий возбуждение переменного магнитного поля в зоне трубопровода, измерение над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, и одновременно с индукцией переменного магнитного поля измеряют три компоненты вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение расположения аномалий постоянного и переменного магнитного поля, магнитные моменты и параметры нарушения изоляционного покрытия трубопровода, отличающийся тем, используют два генератора переменного тока, - основной и вспомогательный, - подключенных на концах обследуемого участка трубопровода и включенных навстречу друг другу, содержащих GPS, причем основной генератор работает непрерывно, а вспомогательный генератор - в импульсном, асинхронном режиме, составляющий не более 20% от времени работы основного генератора, в режиме работы обоих генераторов обеспечивается выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости от него, и позиционирование оператора над обследуемым трубопроводом, в режиме отключения вспомогательного генератора осуществляется диагностический контроль технических параметров подземного трубопровода [3].
Недостатками способа являются:
сроки выполнения диагностического контроля зависит от скорости перемещения оператора над трубопроводом на береговой части водного перехода, на которую влияют: рельеф местности, наличие кустарников и высокого травяного покрова, локальные непроходимые участки и другие препятствия;
необходимость использования вспомогательных устройств - плавсредства для организации перемещения оператора с диагностическим устройством над трубопроводом по водной поверхности перехода;
влияние течения и волнения водной массы на участке водного перехода, которое ведет к увеличению трудоемкости и сроков диагностического контроля;
увеличение затрат, связанных с обеспечением безопасных условий работы операторов и сохранности диагностического оборудования на случай аварийной ситуации при обследовании участка водного перехода.
Задачей изобретения является повышение точности диагностического контроля при определении пространственного положения трубопровода, снижения затрат и сроков выполнения полевых работ, повышения уровня безопасности труда операторов при использовании плавсредства.
Это достигается за счет того, что в способе определения пространственного положения трубопровода на участке подводного перехода, включающем возбуждение переменного магнитного поля в зоне трубопровода с использованием двух генераторов переменного тока, содержащих GPS, подключенных на береговых концах обследуемого трубопровода и включенных навстречу друг другу, и работающих в асинхронном режиме, обеспечивая возбуждения максимального значения тока и выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости от него, измерение над трубопроводом индукции переменного магнитного поля с помощью трехкомпонентных индукционных датчиков, расположенных совместно с мобильным модулем GPS и блоком сбора и данных и управления устройства на шасси магнитной антенны, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений, отличающийся тем, что магнитометрическую съемку пространственного положения трубопровода осуществляют путем криволинейного перемещения магнитной антенны с использованием беспилотного летательного аппарата (БПЛА) над трубопроводом с шагом от 100 метров, определяют X, Y, Z координаты по максимальному значению индукции магнитного поля, получаемому в точке пересечения магнитной антенны с трубопроводом, вводят полученный массив точек X и Y, принадлежащих оси трубопровода, в программу управления траекторией полета БПЛА, определяют высотную отметку уреза воды Zвп путем установки магнитной антенны на землю, вводят значение высоты Zп=Zвп+h полета БПЛА над водной поверхностью, а затем перемещают магнитную антенну над трубопроводом по заданной траектории полета с помощью БПЛА, получают массив точек X, Y, Z, принадлежащих оси трубопровода и определяют пространственное положение трубопровода.
Сущность предлагаемого технического решения поясняется следующими фигурами:
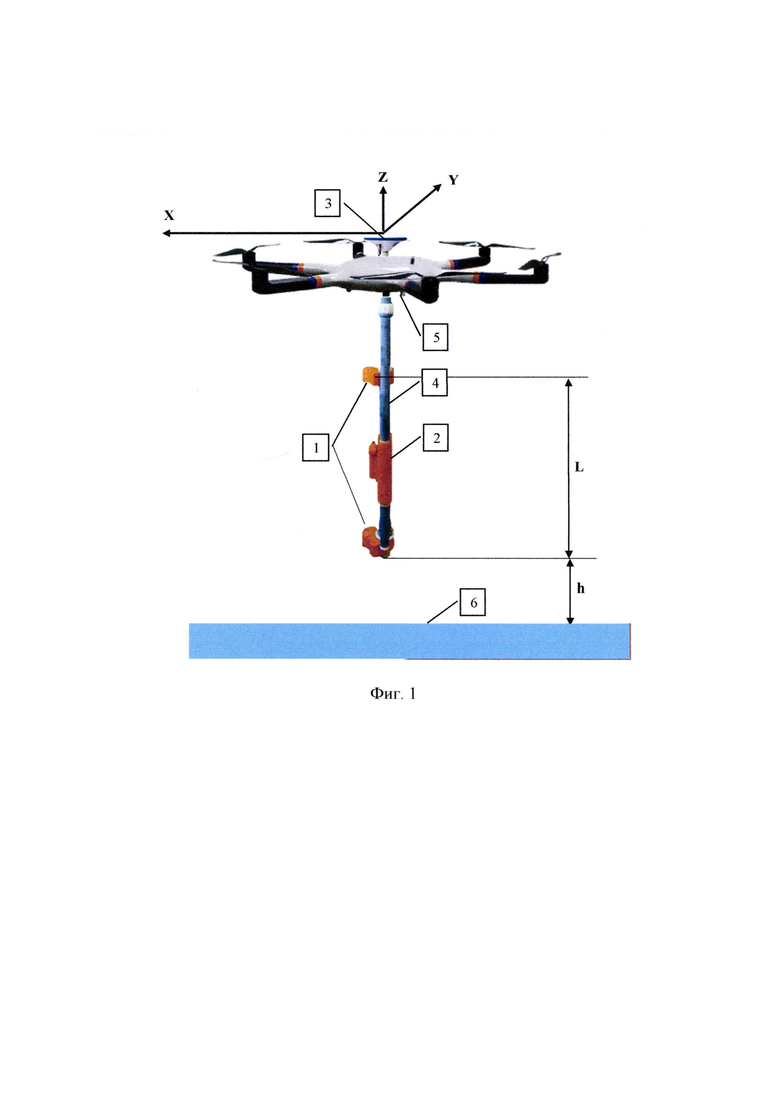
На фиг. 1 представлено устройство для определения пространственного положения трубопровода и его локальная система координат, где:
1 - трехкомпонентные индукционные датчики магнитного поля;
2 - блок сбора данных и управления устройством;
3 - мобильный модуль GPS дифференциальной навигационной спутниковой системы сантиметрового диапазона;
4 - шасси магнитной антенны;
5 - беспилотный летательный аппарат вертолетного типа;
6 - зеркало поверхности водного перехода;
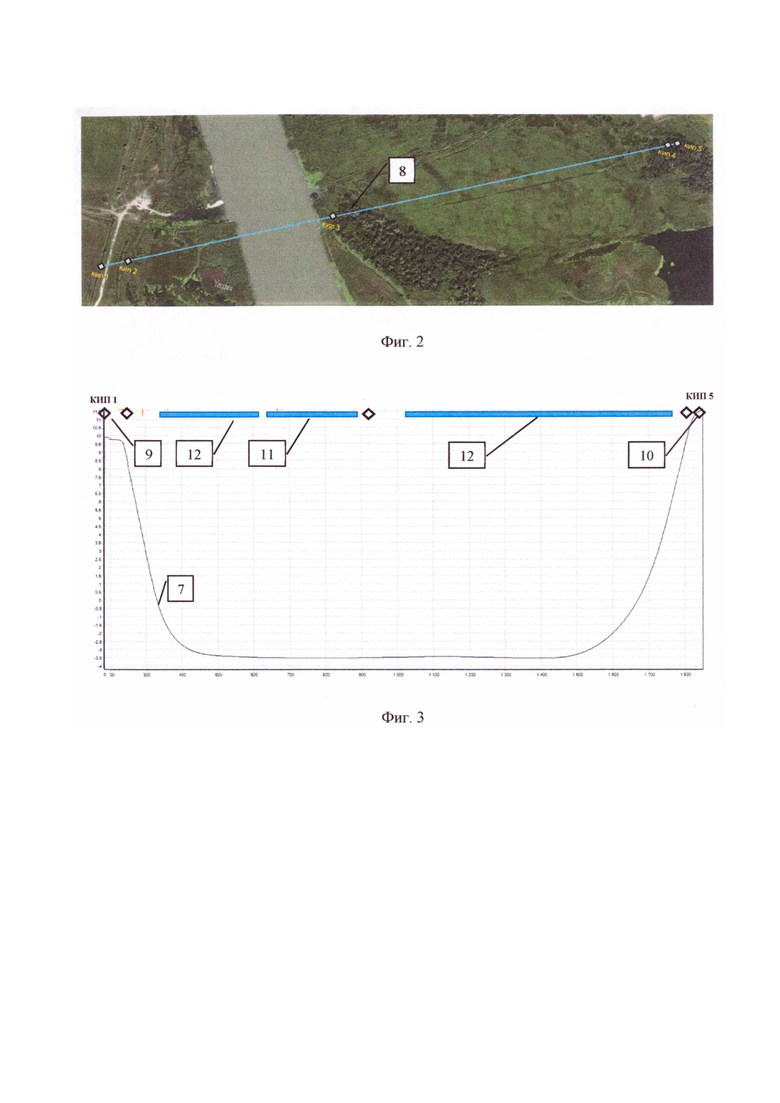
На фиг. 2 представлена спутниковая карта, на которую нанесены: проекция оси трубопровода на местности и его внешние объекты.
На фиг. 3 представлен график высотного положения оси трубопровода и ситуационная информация по коридору расположения трубопровода, где:
7 - трубопровод, высотное положение;
8 - трубопровод, плановое положение;
9 - начальный объект трубопровода на участке водного перехода.
10 - конечный объект трубопровода на участке водного перехода;
11 - река;
12 - пойма реки на правом и левом берегах.
Способ реализуется следующим образом. Измерение индукции магнитного поля над трубопроводом, которое создается токами генераторов, установленных на береговых участках водного перехода, осуществляется с помощью двух трехкомпонентных магнитных датчиков (1), смонтированных на шасси магнитной антенны (4), имеющих чувствительность 5×10-11Тл (Фиг. 1). Расстояние между датчиками L, фиг. 1, может изменяться в зависимости от глубины заложения трубопровода на участке водного перехода. Формирование массива данных, принадлежащих оси трубопровода, осуществляют в реальном режиме времени с использованием аналогово-цифровых преобразователей (АЦП), имеющих частоту оцифровки 50 кГц. Данные с датчиков поступают в блок сбора данных и управления (БСДУ) (2), где накапливаются, обрабатываются и хранятся. В БСДУ также поступают данные с мобильного модуля GPS (3), который смонтирован на корпусе БПЛА (5) - локальная система координат устройства. От базовой станции навигационной спутниковой системы (НСС), установленной на берегу водного перехода, передаются дифференциальные поправки в БСДУ с помощью радиомодема. Перед началом обследования определяют высотную отметку поверхности воды перехода Zвп путем установки магнитной антенны (4) на землю у уреза воды на берегу водного перехода.
Высота полета БПЛА Zп над водной поверхностью перехода выбирается как минимальное и безопасное расстояние между нижним датчиком (1) магнитной антенны (4) и урезом зеркала воды (6) с учетом высоты волнения:
Zп=Zвп+h [м],
где h - расстояние между нижним датчиком и урезом водного зеркала, м.
Программируют и запускают в полет БПЛА по криволинейному маршруту над водной поверхностью (6) с шагом пересечения трубопровода (8) от 100 метров и определяют X, Y, и Z координаты, принадлежащих оси трубопровода по максимальному значению амплитуды магнитного поля, получаемой при пересечении магнитной антенны оси трубопровода (8). Задают траекторию полета БПЛА путем программирования по координатам GPS (X, Y), полученным в ходе криволинейного полета, высоту полета над водным зеркалом (6) перехода Zп, запускают в полет БПЛА, перемещают магнитную антенну (4) между начальным (9) и конечным (10) объектами водного перехода (11, 12), и определяют X, Y, и Z координаты, принадлежащие оси трубопровода (8), с дифференциальными поправками.
Высокая степень определения пространственного положения трубопровода на участке водного перехода достигаются за счет перемещения магнитной антенны (4) точно над осью трубопровода (8), частотой измерения его параметров 50 кГц, что позволяет сформировать большой массив данных, принадлежащих оси трубопровода, и обеспечить измерение линейных координат и связанных с ними высотных отметок трубопровода (7) с шагом от 0,5 м по всей длине участка водного перехода.
Снижение затрат на выполнение работ, повышение уровня безопасности достигаются за счет исключения прямого участия оператора в работе на водной акватории при выполнении измерений, что замещается применением БПЛА, и его высокой скоростью полета, превышающей 5 км/час.
Полученные результаты обследования используют для определения пространственного положения трубопровода (7,8) на участке его водного перехода (фиг. 2 и 3) с применением алгоритмов, заложенных в БСДУ, обеспечивая точность измерений с погрешностью работы НСС сантиметрового диапазона на глубинах заложения трубопровода до 30 метров.
Источники информации
1. Патент РФ №2472178.
2. Патент РФ №2390803.
3. Патент РФ №2634755 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| Способ определения координат планово-высотного положения оси подземного трубопровода | 2020 |
|
RU2743605C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2837559C1 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| Способ обнаружения несанкционированных врезок в подземный трубопровод | 2020 |
|
RU2741177C1 |
| Способ диагностики технических параметров подземного трубопровода | 2020 |
|
RU2735349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
| Способ получения результатов измерений в ходе сканирования скрытых или открытых объектов | 2018 |
|
RU2706456C1 |
Изобретение относится к области магнитной съемки и может быть использовано для определения пространственного положения трубопровода на участке его подводного перехода. Сущность изобретения сводится к выполнению магнитометрической съемки пространственного положения трубопровода с использованием беспилотного летательного аппарата (БПЛА), который перемещает магнитную антенну измерительного устройства над осью трубопровода по заданной траектории полета. Траектория полета задается GPS координатами X, Y, которые предварительно определяются путем криволинейного перемещения магнитной антенны с использованием БПЛА над трубопроводом с шагом от 100 метров по максимальному значению индукции магнитного поля, получаемому в точке пересечения магнитной антенны с трубопроводом. Высота полета Zп БПЛА задается из расчета безопасного перемещения магнитной антенны устройства над водной поверхностью. Высокая точность пространственного положения трубопровода на участке водного перехода достигается: перемещением БПЛА со скоростью свыше 5 км/час с погрешностью работы дифференциальной навигационной спутниковой системы (НСС) сантиметрового диапазона магнитной антенны над осью трубопровода, а также измерением линейных координат и связанных с ними высотных отметок с шагом от 0,5 м по всей длине участка водного перехода трубопровода. Полученные результаты обследования используют для определения пространственного положения трубопровода на участке его водного перехода, обеспечивая точность измерений с погрешностью работы НСС на глубинах заложения трубопровода до 30 метров. 3 ил.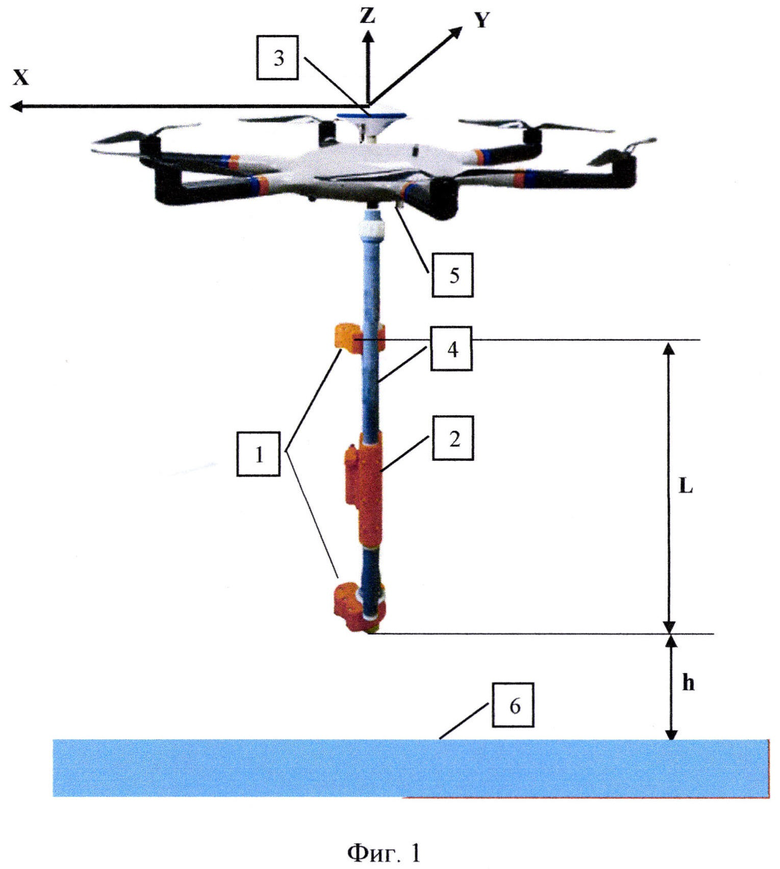
Способ определения пространственного положения трубопровода на участке подводного перехода, включающий возбуждение переменного магнитного поля в зоне трубопровода с использованием двух генераторов переменного тока, содержащих GPS, подключенных на береговых концах обследуемого трубопровода и включенных навстречу друг другу, и работающих в асинхронном режиме, обеспечивая возбуждение максимального значения тока и выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости от него, измерение над трубопроводом индукции переменного магнитного поля с помощью трехкомпонентных индукционных датчиков, расположенных совместно с мобильным модулем GPS и блоком сбора данных и управления устройства на шасси магнитной антенны, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений, отличающийся тем, что магнитометрическую съемку пространственного положения трубопровода осуществляют путем криволинейного перемещения магнитной антенны с использованием беспилотного летательного аппарата (БПЛА) над трубопроводом с шагом от 100 метров, определяют X, Y, Z координаты по максимальному значению индукции магнитного поля, получаемому в точке пересечения магнитной антенны с трубопроводом, вводят полученный массив точек X и Y, принадлежащих оси трубопровода, в программу управления траекторией полета БПЛА, определяют высотную отметку уреза воды Zвп путем установки магнитной антенны на землю, вводят значение высоты Zп=Zвп+h полета БПЛА над водной поверхностью, а затем перемещают магнитную антенну над трубопроводом по заданной траектории полета с помощью БПЛА, получают массив точек X, Y, Z, принадлежащих оси трубопровода, и определяют пространственное положение трубопровода.
| Способ определения координат планово-высотного положения оси подземного трубопровода | 2020 |
|
RU2743605C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| СПОСОБ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2008 |
|
RU2390803C2 |
| Установка для непрерывной отмывки тканей из стеклянного волокна от замасливателей | 1955 |
|
SU105032A1 |

