Изобретение относится к нефтедобыче, в частности к устройствам, предназначенным для автоматического диагностирования состояния скважинной штанговой насосной установки в процессе ее работы.
Цель изобретения - повышение качества диагностики работы глубинных насосов за счет исключения влияния привода глубинного насоса на формирование динамог- раммы при одновременном повышении эксплуатационной надежности системы.
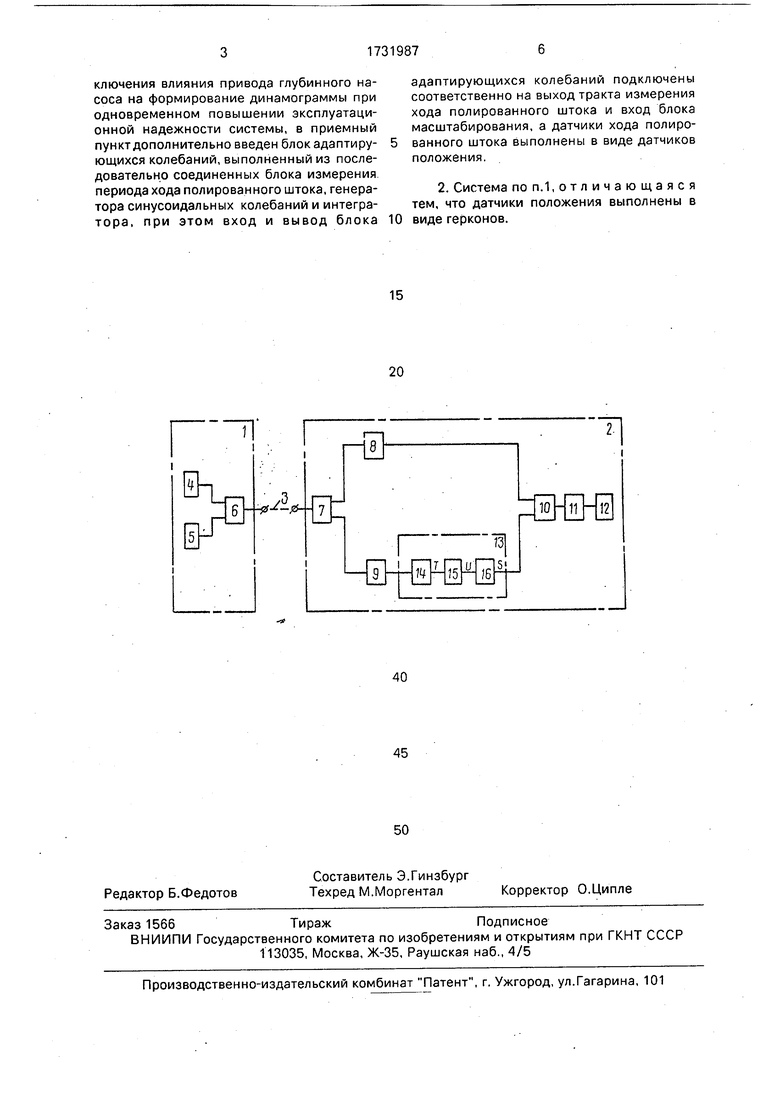
На чертеже представлена функциональная блок-схема системы телединамометри- рования глубинных насосов.
Система телединамометрирования глубинных насосов содержит контролируемый 1 и приемный 2 пункты, соединенные каналом 3 связи, На контролируемом пункте 1 на
каждой глубиннонасосной установке установлены датчик 4 усилий и датчик 5 положе- ния, выходы которых посредством коммутатора 6 подключены на вход канала 3 связи. Приемный пункт 2 включает блок регистратора динамограмм в виде селектора 7 для разделения каналов измерения усилия и хода, приемных трактов измерения усилия 8 и хода 9, блока 10 масштабирования, блока 11 селектирования и специализированного вычислительного устройства 12 и блок 13 адаптирующихся колебаний, состоящий из последовательно соединенных блока 14 измерения периода хода полированного штока, генератора 15 синусоидальных колебаний и интегратора 16. Выход канала 3 связи через селектор 7 подключен к соответствующим входам трактов
vj СО
Ю СО
измерения усилия 8 и хода 9 блока регистратора динамограмм. Выход тракта 8 измерения усилия подключен к одному из входов блока 10 масштабирования, а выход тракта 9 измерения хода - к входу блока 14 измерения периода хода полированного штока, а выход которого подключен к входу генератора 15 синусоидальных колебаний, выход которого подключен к входу интегратора 16, выход которого подключен к другому входу блока 10 масштабирования. Выход блока 10 масштабирования подключен к входу блока 11 селектирования, выход которого связан со специализированным вычислительным устройством 12. Датчики 5 положения выполнены, например, в виде герконов.
Система телединамометрирования глубинных насосов работает следующим образом.
Приложенное к полированному штоку станка-качалки усилие преобразуется дат- чиком 4 усилия в модулированные сигналы, которые с помощью коммутатора 6 передаются в канал 3 связи. На приемном пункте 2 эти сигналы с помощью селектора 7 передаются в приемный тракт 8 измерения уси- лия, откуда передаются на блок 10 масштабирования. При прохождении точки подвеса штанг через крайнее положение датчик 5 положения передает модулированные сигналы о начале хода и периоде хода полированного штока с помощью коммутатора 6 в канал 3 связи, откуда эти сигналы с помощью селектора 7 поступают в приемный тракт 9 измерения хода и далее - на вход блока 14 измерения периода хода пол- ированного штока блока 13 адаптирующихся колебаний. В блоке 14 фиксируется значение времени Т между двумя пришедшими сигналами о конечных положениях. Это время пропорционально времени двои- ного хода полированного штока при установке одного датчика 5 положения или пропорционально времени одинарного хода при установке двух датчиков 5 положения (один - в крайнем нижнем, а другой - в крайнем верхнем положении). Сигнал с блока 14 поступает на вход генератора 15 сину- соидальных колебаний, который вырабатывает синусоидальные колебания с периодом И, равным периоду, заданному блоком 14 измерения периода хода полированного штока станка-качалки. На выходе генератора 15 появляется сигнал, пропорциональный скорости V перемещения полированного штока. После интегрирования этого сигнала интегратором 16 на его выходе появляется сигнал, пропорциональный пути S, пройденному полированным штоком стакана-качалки при возвратно-поступательном движении. Таким образом, блок 13 адаптирующихся колебаний вырабатывает сигналы, пропорциональные времени Т, скорости V и пути перемещения S полированного штока насосной установки по двум параметрам, приходящим с датчика 5 положения: по началу хода и периоду хода полированного штока, а закон движения в виде чистой синусоиды формирует блок 13 адаптирующихся колебаний. При этом блок 13 адаптируется к параметрам Т, V и S при подключении каждой глубиннонасосной установки. Для этого на каждый глубиннонасосной установке необходимо установить наряду с датчиком 4 усилий датчик 5 положения (геркон) в наиболее удобном для эксплуатации насосной установки месте, например, магнит - на кривошипе станка- качалки, а геркон - на раме станка-качалки. Сигналы с блока 13 адаптирующихся колебаний подаются на блок 10 масштабирования, на другой вход которого поступают сигналы из тракта 8 измерения усилия, В блоке 10 масштабирования сигналы обоих трактов измерения усилия 8 и хода 9 приводятся к единому времени действия и единой максимальной амплитуде участка неизменной нагрузки, чтобы исключить влияние индивидуальных различий в технологическом оборудовании скважин. Сигнал с блока 10 масштабирования поступает в блок 11 селектирования признаков и затем на специализированное вычислительное устройство 12, где регистрируются зависимости усилие-время, усилие -скорость, усилие- путь и другие, по которым определяются технологические и технические параметры глубиннонасосных установок и их оборудования.
Формула изобретения 1. Система телединамометрирования глубинных насосов, содержащая контролируемый пункт, включающий установленные на каждой глубиннонасосной установке датчики усилия и хода полированного штока и коммутатор, и приемный пункт, включающий блок регистратора динамограмм в виде селектора для разделения каналов, прием- ныхтрактов измерения усилия и хода, блока масштабирования, блока селектирования и вычислительного устройства, при этом контролируемый и приемный пункты соединены каналом связи, вход которого подключен посредством коммутатора к выходам датчиков усилия и хода, а его выход - через селектор на соответствующие входы трактов измерения усилия и хода блока регистратора динамограмм, отличающаяся тем, что, с целью повышения качества диагностики работы глубинных насосов за счет исключения влияния привода глубинного насоса на формирование динамограммы при одновременном повышении эксплуатационной надежности системы, в приемный пункт дополнительно введен блок адаптирующихся колебаний, выполненный из последовательно соединенных блока измерения периода хода полированного штока, генератора синусоидальных колебаний и интегратора, при этом вход и вывод блока
адаптирующихся колебаний подключены соответственно на выход тракта измерения хода полированного штока и вход блока масштабирования, а датчики хода полиро- ванного штока выполнены в виде датчиков положения.
2. Система по п.1,отличающаяся тем, что датчики положения выполнены в виде герконов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТЕЛЕДИНАМОМЕТРИРОВАНИЯ ГЛУБИННЫХ ШТАНГОВЫХ НАСОСОВ | 1999 |
|
RU2160385C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ СКВАЖИННОГО ГЛУБИННОНАСОСНОГО ОБОРУДОВАНИЯ | 1999 |
|
RU2168653C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЕБИТА НЕФТИ ДЛЯ ШТАНГОВЫХ ГЛУБИННО-НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2228459C2 |
| КОМПЛЕКС УПРАВЛЕНИЯ РЕЖИМОМ ОТКАЧКИ И КОНТРОЛЯ ДЕБИТА НЕФТИ ДЛЯ ШТАНГОВЫХ ГЛУБИННО-НАСОСНЫХ УСТАНОВОК | 2002 |
|
RU2213262C1 |
| Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин | 1984 |
|
SU1229426A1 |
| Устройство телединамометрирования глубиннонасосных скважин | 1981 |
|
SU969968A1 |
| КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ НАСОСНОГО ОБОРУДОВАНИЯ НЕФТЯНЫХ СКВАЖИН | 2002 |
|
RU2221168C1 |
| Устройство для обработки телединамограмм глубиннонасосных скважин | 1983 |
|
SU1134702A1 |
| Устройство для трубного телединамометрирования глубиннонасосных скважин | 1979 |
|
SU855198A1 |
| Устройство телединамометрирования глубиннонасосных скважин | 1983 |
|
SU1116216A2 |
Использование: в нефтедобыче, в частности к устройствам, предназначенным для автоматического диагностирования сква- жинной штанговой насосной установки в процессе ее работы. Сущность изобретения : Система темдинамометрирования глубинных насосов содержит контролируемый 1 и приемный 2 пункты, соединенные каналом 3 связи. Контролируемый 1 пункт включает в себя установленные на каждой глубинно- насосной установке датчик 4 усилий и датчик 5 положения. Приемный пункт 2 содержит блок регистратора динамограмм в виде селектора 7 для разделения каналов измерения усилия и хода и дополнительный блок 13 адаптирующихся колебаний, состоящий из последовательно соединенных блока 14 измерения периода хода полированного штока, генератора 15 синусоидальных колебаний и интегратора 16, при этот вход блока 14 измерения периода хода полированного штока соединен по каналу связи 3 с выходами датчиков 5 положения, а выход интегратора 16 подключен к входу блока регистратора динамограмм, к второму входу которого подключены выходы датчиков 4 усилий, причем датчики 5 положения выполнены в виде герконов. 1 з.п.ф-лы, 1 ил. сл с
| Устройство для диагностированияСКВАжиННыХ шТАНгОВыХ HACOCOB | 1979 |
|
SU823636A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
