Изобретение относится к измерительной технике и может быть использовано для автоматизированного контроля характеристик линейности моментов вращения спиральных пружин и тор- сионов с неограниченным углом закрутки с заданной точностью,,
Известен рычажной механизм динамометра, для испытаний часовых волосков, содержащий установленные на основании вместе с червячной передачей поворотный диск со шкалой и зажимом для конца волоска, коромысло с клиновой опорой и зажимом для внутреннего витка волоска и грузиком для приведения его (коромысла) в горизонтальное положение, замечая при этом по шкале диска угол поворота
Однако данное устройство не обеспе- (чивает требуемой точности измерения Известно также устройство для измерения момента спиральных пружин, содержащее корпус, подвижную электромагнитную рамку, установленную в корпус и соединенную с зажимом внутреннего конца испытуемой пружины, и зажим наружного конца испытуемой пружины. .
Недостатком этого устройства является низкая точность измерения, обусловленная конструкцией зажимов внутреннего и внешнего концов испытуемой пружины, которые не обеспечивают стабильности положения внутреннего витка и деформируют наружный конец пружины, что приводит к искажению действительной характеристики испытуемой пружины
Наиболее близким к предлагаемому является устройство для измерения мо- ;мента спиральных пружин, содержащее корпус, подвижную рамку, подвешенную
0
5
0
5
5
0
5
0
на растяжках, закрепленных в корпусе посредством пластинчатых пружин, при этом зажим внутреннего конца пружины выполнен в виде двух половинок конуса, одна из которых шарнирно связана с другой, жестко соединенной с электромагнитной рамкой, и подпружинена, а зажим наружного конца пружины выполнен в виде подпружиненного прихва- |та, шарнирно связанного с введенным в устройство кольцом, установленным в корпусе и имеющим установочные пло- доадкио
Однако в известном устройстве на точность измерения влияет субъективный фактор и невысокая производительность
Цель изобретения - повышение точ- ности и производительности за счет автоматизации процесса контроля,.
Эта цель достигается тем, что в стенд, содержащий размещенные на основании подвижную электромагнитную рамку, соединенную с зажимом внутреннего конца испытуемой пружины, и зажим наружного конца испытуемой пружины, введены последовательно.соединенные компаратор, интегратор, ана- лого-запоминающий блок и блок управления током,, аналого-цифровой преобразователь, счетчик импульса, дешифратор конца рабочего угла пружины, мультиплексор, регистратор, блок запуска, элемент И, привод, состоящий из двигателя и редуктора, блок управления приводом, датчик угла, блок задержки,- диск с отверстием и источник света с фотоприемником1, при этом вал датчика угла связан с входным валом стенда, на котором закреплены выходной вал редуктора, входной вал которого соединен с двигателем, и зажим
наружного конца пружины, на выходном валу стенда, соосном входному, зйкреп- лены диск с отверстием, с одной стороны которого расположен источник света, ас другой - фотоприемник, подключенный к входу компаратора, зажим внутреннего конца пружины и ось электромагнитной рамки, катушка которой подключена к управляющему входу блока управления током, информационный выход которого соединен с информационным входом аналого-цифрового преобразователя, информационный выход которого соединен с первым информационным входом мультиплексора, а второй его выход - с запускающим входом мультиплексора, второй информационный вход которого связан с входом дешифратора конца рабочего угла пружины и выходом счетчика импульсов, тактовый выход которого соединен с входом блока задержки, выход которого соединен с запускающим входом аналого-цифрового преобразователя и с первым входом бло- ка управления приводом, выход которо- |Го связан с двигателем привода, вто- |рой вход - с выходом элемента И, пер- вый вход которого соединен с выходом дешифратора, а второй вход - с пер10
15
Зажим 7 внутреннего конца пружины и диск 8 с отверстием установлены на входном валу 9 стенда, с которым связана ось электромагнитной рамки 103 По разные стороны диска 8 установлены источник 11 света и Лотоприемник 12 о Фотоприемник подключен на вход компаратора 13, входной сигнал которого поступает через интегратор 14 на вход аналого-запоминающего блока 15, выходной сигнал которого поступает на блок 16 управления током, управляющий выход которого подключен к обмотке рамки 10. а информационный выход связан с информационным входом аналого-цифрового преобразователя 170
Выход датчика 4 угла подключен к счетному входу счетчика 18 импуль- 2Q сов, информационный сигнал которого поступает на дешифратор 19 конца рабочего угла пружины и второй информационный вход мультиплексора 20, первый информационный вход которого подключен к выходу аналого-цифрового преобразователя 17, запускающий вход муль типлексора связан с выходом импульса конца измерения аналого-цифрового преобразователя 170 Выход мультиплексора 20 связан с регистратором 21, вы25
выя выходом блока запуска, вход кото- ™ ходной импулъс конца регистрации кото0
5
Зажим 7 внутреннего конца пружины и диск 8 с отверстием установлены на входном валу 9 стенда, с которым связана ось электромагнитной рамки 103 По разные стороны диска 8 установлены источник 11 света и Лотоприемник 12 о Фотоприемник подключен на вход компаратора 13, входной сигнал которого поступает через интегратор 14 на вход аналого-запоминающего блока 15, выходной сигнал которого поступает на блок 16 управления током, управляющий выход которого подключен к обмотке рамки 10. а информационный выход связан с информационным входом аналого-цифрового преобразователя 170
Выход датчика 4 угла подключен к счетному входу счетчика 18 импуль- сов, информационный сигнал которого поступает на дешифратор 19 конца рабочего угла пружины и второй информационный вход мультиплексора 20, первый информационный вход которого подключен к выходу аналого-цифрового преобразователя 17, запускающий вход мультиплексора связан с выходом импульса конца измерения аналого-цифрового преобразователя 170 Выход мультиплексора 20 связан с регистратором 21, вы5
ходной импулъс конца регистрации кото
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2012 |
|
RU2526553C2 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 1993 |
|
RU2075895C1 |
| Автоматизированный измеритель выходных характеристик спиральных пружин | 2014 |
|
RU2608330C2 |
| АВТОМАТИЗИРОВАННЫЙ ИЗМЕРИТЕЛЬ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2014 |
|
RU2586411C1 |
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| Автоматизированный измеритель момента спиральных пружин | 2017 |
|
RU2676220C1 |
| Автоматизированный стенд контроля круговых потенциометров | 2019 |
|
RU2725887C1 |
| Стенд для измерения частотных характеристик свойств веществ | 1982 |
|
SU1114981A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА АНАЛОГОВЫХ СИГНАЛОВ | 1991 |
|
RU2012036C1 |
| Устройство для измерения угловых перемещений | 1986 |
|
SU1392350A1 |
Изобретение относится к измерительной технике и служит доя автоматизированного контроля характеристик моментов вращения спиральных пружин и торсионов с неограниченным углом закрутки. Цель изобретения - повышение точности и производительности за счет автоматизирования процесса контроля. Контроль выходных характеристик пружин осуществляется согласованной работой датчика 4 угла, счетчика 18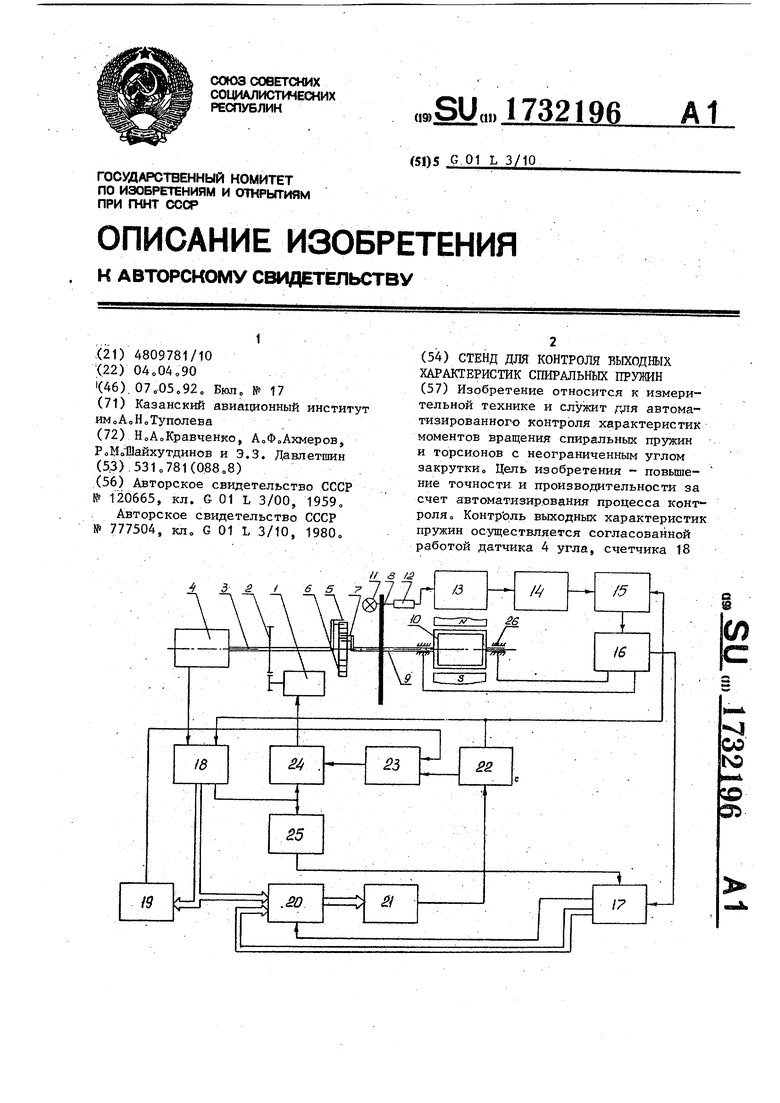
рого соединен с выходом регистратора, а второй выход - с установочными входами счетчика импульсов и аналого- запоминающего блока
На чертеже дана схема предлагаемого стенда
На схеме обозначены двигатель 1; редуктор 2; входной вал 3 стенда; датчик 4 угла, зажим 5 наружного конрого поступает на вход блока 22 запус ка, второй выход которого соединен с установочными входами аналого-запоминающего блока 15 и счетчика 18 35 импульсов о Первый выход блока 22 запуска соединен с вторым входом элемен та И 23, первый вход которого соедине с выходом дешифратора 19 конца рабочего угла пружины, а выход - с вторым
ца пружины, испытуемая пружина 6, за- 40 входом блока 24 управления приводом, . внутреннего конца пружины, диск 8 с отверстием, выходной вал 9 стенда, электромагнитная рамка 10, источник 11 света, фотоприемник 12, компаратор 13, интегратор 14, анало- го-запоминающий блок 15, блок 16 управления током, аналого-цифровой пре- чэбразователзь 17, счетчик 18 импульсов, дешифратор 19, мультиплексор 20, регистратор 21, блок 22 запуска, элемент И 23, блок 24 управления приводом, блок 25 задержки, токоподводя- щие опоры 26,
„ В стенде двигатель 1у установленный на основании, состыкован с редуктором 2, закрепленным на входном валу 3 стенда, на котором также закреплены датчик 4 угла и зажим 5 наружного конца спиральной пружины 6.
выход которого подключен к двигателю 1 привода, а первый вход связан с тактовым выходом счетчика 18 импульсов и входом блока 25 задержки, выход
45 ной сигнал которого поступает на запускающий вход аналого-цифрового преобразователя 17 Электромагнитная рам ка 10 установлена на токопроводяших опорах 26„
50 Стенд для контроля выходных характеристик спиральных пружин работает следующим образом
Контролируемую пружину 6 наружным концом закрепляют в зажиме 5, а внут55 ренний конец - в зажиме 7, а диск 8 поворачивают вокруг вала 9 до совмещения отверстия с осью светового .потока источника 11 света и фотоприемни ка 12.
рого поступает на вход блока 22 запуска, второй выход которого соединен с установочными входами аналого-запоминающего блока 15 и счетчика 18 35 импульсов о Первый выход блока 22 запуска соединен с вторым входом элемента И 23, первый вход которого соединен с выходом дешифратора 19 конца рабочего угла пружины, а выход - с вторым
40 входом блока 24 управления приводом,
входом блока 24 управления приводом,
выход которого подключен к двигателю 1 привода, а первый вход связан с тактовым выходом счетчика 18 импульсов и входом блока 25 задержки, выходной сигнал которого поступает на запускающий вход аналого-цифрового преобразователя 17 Электромагнитная рамка 10 установлена на токопроводяших опорах 26„
Стенд для контроля выходных характеристик спиральных пружин работает следующим образом
Контролируемую пружину 6 наружным концом закрепляют в зажиме 5, а внутренний конец - в зажиме 7, а диск 8 поворачивают вокруг вала 9 до совмещения отверстия с осью светового .потока источника 11 света и фотоприемни1- ка 12.
Процесс контроля выходной характеристики спиральной пружины начинается включением блока 22 запуска, при котором вырабатывается импульс с вто рого выхода, устанавливающий счетчик 18 импульсов с iivjiesoe состояние и обнуляющий выход аналоге-запомина оцего блока 15р При этом ток через катушку электромагнитной рамки 10, установленной на токоподводящих опорах 26, равен нулю,
В это же время вырабатывается импульс с первого выхода блока 22 запуска, который через элемент И 23 включает блок 24 управления приводом, выходной сигнал которого включает двигатель 1, который через редуктор 2 вращает вал 3 стенда, поворачивая зажим 5 наружного конца спиральной пружины, создавая через зажим 7 внутреннего конца пружины момент закручивания на валу 9 и поворачивая одновременно диск 8, который перекрывает доступ светового -потока от источника света к фотоприемнику 12„ Это вызывает срабатывание компаратора 13, выходной сигнал которого вызывает линейное нарастание напряжения на выходе интегратора 14 и соответственно на выходе аналого-запомпнающего блока 15 выходной сигнал которого через блок 16 управления током вызывает нарастание тока в катушке электромагнитной рамки 10 таким образом, что возникает противодействующий момент за- кручивающему от редуктора 2С
Описанный процесс продолжается до тех пор, пока идет заполнение импульсов от датчика 4 угла в счетчик 18 импульсов до появления импульса от тактового выхода счетчика 18 импульсов Количество импульсов определяет первую точку контроля характеристики пружины для заданного угла отсчета Тактовый импульс выключает блок 24 управления приводом и двигатель с редуктором останавливается о После этого ток в электромагнитной рамке 10 продолжает нарастать до величины, необходимой для компенсации закручиваю- щего момента с Сигналом об этом служит возникновение доступа светового потока от источника 11 света к фотоприем нику 12 через отверстие в диске 8,
В этот момент отключается компара- тор 13 и выходной сигнал на выходе аналого-эапоминающего блока 15 фиксируется на достигнутом уровне и соответственно стабилизируется ток в ка
5
5 5
0 5 0
5
0
тушке электромагнитной рамки 10, величина которого пропорциональна значе нию контролируемого момента и снимается с информационного выхода блока 16 управления током и подается на информационный выход аналого-цифрового преобразователя 17„
Одновременно импульс тактового выхода счетчика 18 импульсов через блок 25 задержки через время, достаточное для стабилизации тока в электромагнитной рамке 10, поступает на запускающий вход аналого-цифрового преобразователя 170 После преобразования информации от блока 16 управления током в цифровой код на выходе аналого-цифрового преобразователя 17 появляется импульс конца измерения, который через запускающий вход включает мультиплексор 20, пропускающий через себя с первого информационного входа значение момента, а с второго информационного входа от счетчика 18 импульсов - соответствующее значение угла закручивания пружины 6 на регистратор 21, который вырабатывает импульс конца регистрации и запускает блок 22 запуска, который через первый выход включает процесс контроля до следующей точки характеристики пружины с,
Процесс контроля характеристики пружины продолжается до тех пор, пока на выходе счетчика 18 импульсов - установится код, который после дешифратора 19 конца рабочего угла пружины выключит элемент И 23 по первому входу для прохождения выходных импульсов с первого выхода блока 22 запуска через второй вход элемента И 23 на блок 24 управления приводом
Блок 25 задержки сигнала может быть выполнен на базе ждущего мультивиб-. ратора, элемент И 23, компаратор 13, счетчик 18 импульсов, аналого-цифровой преобразователь 17 могут быть построены по известному принципу„ Блок 22 запуска - ждущий мультивибратор, управляемый кнопкой внешнего запуска и формирующий импульс, который через элемент ИЛИ пропускает импульсы на элемент И 23, а через второй вход элемента.ИЛИ поступает импульс конца регистрации от регистратора 21, блок 24 управления приводом содержит вход- ной триггер с раздельными входами, изменяющий свое состояние импульсами с выходов элемента И 23 и тактово- го выхода со счетчика 18 импульсов„
Датчик 4 угла может быть выполнен по одной из схем, зависящей от точности и разрешающей способности Блок 16 управления током - это обычный стабилизатор тока, опорное напряжение которого податеся от анало- го-запоминающего блока 15„ Информационный сигнал от блока 16 управления током снимается с резистора обратной связи, В качестве регистратора 21 может быть использован, например, стандартный комплекс измерительный цифровой Р386К, В случае использования в качестве регистратора ЭВМ или микропроцессорной системы можно произвести расчет и выдать информацию о нелинейности характеристики пружины, определить максимальную и выполнить допусковую разбраковки перед сборкой изделия о
Выполнение предлагаемого автоматизированного стенда контроля выходных характеристик спиральных пружин позволяет повысить точность и производительность эа счет значительного уменьшения времени регистрации информативного сигнала и, следовательно, возможного увеличения за счет этого скорости закрутки пружины при контроле моментов, а также возможна эксплуатация нескольких стендов одним оператором
Повышение точности контроля достигается за счет ввведения датчика 4 угла, который обладает большей точностью по сравнению со стрелочными отсчетными устройствами, чем устраняется субъективная погрешность отсчета оператором0 Кроме того, в предлагаемом стенде отсутствуют пружины (спиральные, торсионы) для токоподво- дов, которые обладают дополнительной нестабильностью параметров,
Данный стенд обладает более широкими функциональными возможностями, т ,е„ позволяет контролировать характеристики торсионов, заменяя лишь при этом узел закрепления. Диапазон рабочего угла закрутки в предлагаемом стенде практически неограничен, тсе, возможно контролировать заводные пружины, спирали-волоски и т.д.
Формула изобретения
Стенд для контроля выходных характеристик спиральных пружин, содер9bU)
жащий размещенные на опттлмпн nomm - ную электромагнитную рамку, согдпнгн- ную с зажимом внутренне о конца нсип- туемой пружины, и зажим наружного конца испытуемой пружины, о т л и- чающийся тем, то, с цепью повышения точности и производительности за счет автоматизации процесса
контроля, в него введены последовательно соединенные компаратор, интегратор, аналоге-запоминающий блок и блок управления током, а также аналого-цифровой преобразователь, счетчик
импульсов, дешифратор, мультиплексор, регистратор, блок запуска, элемент И, привод, состоящий из двигателя и редуктора, блок управления приводом, датчик угла, блок задержки, диск с
отверстием и источник света с фотоприемником, при этом вал датчика угла связан с выходным валом стенда, на котором закреплены выходной вал редуктора, входной вал которого соединен
с двигателем, и зажим наружного конца пружины, на выходном валу стенда, соосном входному, закреплены диск с отверстием, с одной стороны которого расположен источник света, а с - фотоприемник, подключенный к входу компаратора, зажим внутреннего конца пружины и ось электромагнитной рамки, катутшса которой подключена к управляющему входу блока управления током, информационный выход которого
соединен с информационным входом аналого-цифрового преобразователя, информационный выход которого соединен с первым информационным входом мультиплексора, а второй его выход с запускающим входом мультиплексора, второй информационный вход которого связан с входом дешифратора и выходом счетчика импульсов, тактовый выход которого соединен с входом блока
задержки, выход которого соединен с запускающим входом аналого-цифрового преобразователя и с первым входом блока управления приводом, выход которого связан с двигателем привода,
второй вход с выходом элемента И, первый вход которого соединен с выходом дешифратора, а второй вход - с первым выходом блока запуска, вход которого соединен с выходом регистратора, а второй выход - с установочными входами счетчика импульсов и ана- лого-запоминающего блока,
| Устройство для измерения момента спиральных пружин к измерительным приборам | 1958 |
|
SU120665A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
