Изобретение относится к области измерительной техники и может быть использовано для автоматизированного определения величины момента, создаваемого плоской спиральной пружиной или торсионом с неограниченным углом закрутки, плоской пружиной, работающей на изгиб или кручение, селективного подбора близких по характеристикам пружин с заданной точностью, контроля качества этапов технологического процесса их изготовления.
Известно устройство контроля крутящих моментов спиральных пружин согласно а.с. СССР SU №1081446, G01L 3/10, опубл. 23.03.1984 г., бюллетень №11, содержащее основание, гнездо, закручивающий шпиндель с жестко закрепленным на нем контрольным рычагом, датчик и электромеханический привод, связанный с закручивающим шпинделем.
Устройство для измерения момента спиральных пружин согласно а.с. СССР №777504, G01L 3/10, опубл. 07.11.1980 г., бюллетень №41 содержит подвижную часть, установленную в корпусе с помощью растяжек, датчик углового положения подвижной части, усилитель, моментный датчик в виде постоянного магнита, закрепленного на подвижной части, и неподвижных катушек и компенсатор жесткости растяжек.
Полуавтомат для проверки крутящих моментов спиральных пружин согласно а.с. СССР №433367, G01L 3/10, опубл. 25.06.1974 г., бюллетень №23 содержит гильзу, свободно посаженную на закручивающий шпиндель, несущий на себе поводок с собачкой, сцепляющейся с храповым колесом шпинделя, и двумя упорными кулачками, определяющими поочередно величину углового спуска проверяемой пружины, механически взаимодействующими с жесткими откидными упорами, два электромагнитных датчика, два грузовых рычага.
Стенд контроля выходных характеристик спиральных пружин согласно а.с. СССР №1732196, G01L 3/10, опубл. 07.05.1992 г., бюллетень №17 содержит датчик угла, счетчик импульсов, блок управления, привод, компаратор, интегратор, аналого-запоминающий блок, блок управления током, аналого-цифровой преобразователь, дешифратор, мультиплексор, блок запуска, блок задержки, привод, источник света, фотоприемник, диск с отверстием датчик угла, опоры, электромагнитную рамку, входной вал, выходной вал, регистратор.
К недостаткам этих устройств следует отнести наличие погрешностей механизмов задания и отсчета моментов закручивания пружин за счет трения между подвижными элементами конструкции, сложность измерения параметров пружин и торсионов с малым моментом и углом закручивания более одного оборота, отсутствие автоматизированного сбора по точкам информации в заданном диапазоне рабочего угла пружин, обработки информации о качестве пружин и отбора пружин регистратором с близкими характеристиками, что важно для измерительных приборов.
Наиболее близким по технической сущности к заявленному техническому решению, взятым за прототип, является автоматизированный стенд контроля выходных характеристик спиральных пружин согласно патенту на изобретение №2526553, опубл. 27.08.2014 г., бюл. №24, который содержит выходной вал стенда, соединенный с зажимом внутреннего конца испытуемой пружины, зажим наружного конца испытуемой пружины, связанный с входным валом стенда, соединенным через редуктор с электродвигателем, который подключен к выходу блока управления приводом, блок реверсирования, дешифратор конца измерения, аналого-цифровой преобразователь, регистратор, аналого-запоминающий блок, блок управления током, счетчик импульсов, вход которого связан с выходом датчика угла, а информационный выход с дешифратором конца измерения, компаратор, вход которого подключен к фотоприемнику, связанному с источником света через зеркало оптической системы, интегратор, выход которого связан со входом аналого-запоминающего блока, выход которого соединен с входом блока управления током, информационный выход которого подключен к входу аналого-цифрового преобразователя, информационный выход которого соединен с входом регистратора, а запускающий выход с запускающим входом регистратора, регулировочное устройство, коромысло, подвижный балансировочный груз, тяговая обмотка электромагнита, подключенная к управляющим выходам блока управления током, сердечник электромагнита, установленный на первом плече коромысла, которое жестко закреплено на выходном валу стенда, а на втором плече коромысла установлено зеркало оптической системы и подвижный балансировочный груз, механически соединенный с регулировочным устройством, ключ, выход которого подключен ко входу интегратора, блок запуска измерения, узел сцепления, который связывает входной вал датчика угла с входным валом стенда, а его управляющий вход подсоединен к управляющему входу ключа, первому входу первого элемента И, выход которого через блок реверсирования подключен к выходу блока управления приводом и электродвигателю, и выходу блока управления сцеплением, первый вход которого соединен с первым выходом блока запуска измерения, а второй вход связан с установочными входами счетчика импульсов, аналого-запоминающего блока, интегратора и выходом первого элемента ИЛИ, первый вход которого подсоединен ко второму выходу блока запуска измерения, третий выход которого связан с первым входом блока управления приводом, а второй вход первого элемента ИЛИ подключен к выходу второго элемента И, первый вход которого соединен с выходом элемента НЕ, второй вход связан с выходом регистратора и первым входом третьего элемента И, выход которого соединен со вторым входом блока управления приводом, а второй вход подключен к выходу дешифратора конца измерения, входу элемента НЕ и первому входу второго элемента ИЛИ, второй вход которого подсоединен к тактовому выходу счетчика импульсов, а выход соединен с третьим входом блока управлении приводом и первым входом четвертого элемента И, выход которого подключен к запускающему входу аналого-цифрового преобразователя, а второй вход подключен к выходу компаратора, ко второму входу первого элемента И, входу ключа и запускающему входу аналого-запоминающего блока, причем входные валы датчика угла и узла сцепления, входной вал стенда и выходной вал стенда расположены на опорах и соосно.
К недостаткам прототипа следует отнести недостаточную точность измерения за счет увеличенного трения в опорах выходного вала, невысокую производительность сервопривода имеющего муфты, недостаточный диапазон измерения и сложность схемы задания пошагового угла закручивания пружины в процессе контроля, недостаточные динамические характеристики процесса контроля.
Технический результат, на достижение которого направлено изобретение, заключается в повышении эффективности работы стенда: увеличении точности измерения уменьшении трения в опорах, расширении диапазона измерения за счет ввода второго электромагнита с сердечником, увеличении производительности путем улучшения динамических характеристик процесса контроля за счет ввода шагового двигателя и ограничительных упоров движения плеч коромысла при его уравновешивании.
Технический результат достигается тем, что в автоматизированном измерителе выходных характеристик спиральных пружин, содержащем аналого-цифровой преобразователь, информационный выход которого соединен с входом регистратора, а запускающий выход с запускающим входом регистратора, компаратор, вход которого подключен к фотоприемнику, а выход подключен к управляющему входу аналого-запоминающего блока и входу ключа, выход которого соединен со входом интегратора, выход которого связан со входом аналого-запоминающего блока, выход которого соединен с входом блока управления током, информационный выход которого подключен к входу аналого-цифрового преобразователя, а выходы управления током соединены с входами измерительного блока, который включает в себя зажим внутреннего конца испытуемой пружины, зажим наружного конца испытуемой пружины, входной вал, выходной вал, связанный с коромыслом, на конце плеча которого установлен сердечник электромагнита, тяговую обмотку электромагнита, подвижный балансировочный груз, фотоприемник, связанный с источником света через зеркало оптической системы, новым является то, что в него введены шаговый двигатель, выходной вал которого соединен с входным валом измерительного блока, который установлен на опоре, модуль управления шаговым двигателем, второй электромагнит с сердечником, расположенным симметрично и перевернуто первому на втором конце коромысла, причем тяговые обмотки электромагнитов соединены последовательно, в центре симметрии которого установлено зеркало оптической системы, модуль управления процессом контроля, входная шина которого соединена с выходной шиной регистратора, выход которого подключен к первому входу модуля управления процессом контроля, второй вход связан с выходом компаратора, а первый выход подключен к управляющему входу ключа, второй выход подключен к установочному входу интегратора, третий выход соединен с установочным входом аналого-запоминающего блока, четвертый выход подключен к запускающему входу аналого-цифрового преобразователя, а выходная шина связана с входной шиной модуля управления шаговым двигателем, выходная шина которого соединена с входной шиной шагового двигателя.
В автоматизированном измерителе выходных характеристик спиральных пружин в измерительном блоке зажим наружного конца пружины содержит опорный диск закрепленный по оси симметрии к внутреннему торцу входного вала измерительного блока и соединенный с опорной пластиной, а через фрикционную прокладку стянут зажимным винтом фрикциона с подвижным диском, который снабжен подвижной пластиной с корректирующим винтом, связанным с опорной пластиной, и на котором установлены эксцентрично перпендикулярно два зажимных элемента наружного конца пружины вдоль радиуса и перпендикулярно им две стойки оси кулачка зажимных элементов наружного конца пружины симметрично относительно кулачка зажимных элементов наружного конца пружины на расстоянии от оси вращения подвижного диска, равном радиусу наружного конца пружины, через которые ортогонально проходит ось кулачка зажимных элементов наружного конца пружины, на которой расположен кулачок с возможностью касания зажимных элементов наружного конца пружины для их симметричного разжима - зажима за счет поворота рукоятки оси кулачка зажимных элементов наружного конца пружины, а зажим внутреннего конца пружины содержит зажимные элементы внутреннего конца пружины, закрепленные к коромыслу симметрично и соосно выходному валу, на котором закреплена фиксируемая втулка, соединенная ортогонально с осью балансировочного груза, на которой установлен подвижный балансировочный груз, при этом подвижный стол установлен на колонках и связан с первыми концами пружин возврата, а вторые их концы подсоединены вместе с упорами и колонками подвижного стола на неподвижной опоре, а малый и большой кулачки закреплены на оси малого и большого кулачков и ориентированы друг относительно друга с возможностью касания для их симметричного разжима - зажима зажимных элементов внутреннего конца пружины малым кулачком и для подъема - опускания подвижного стола со стороны упоров большим кулачком за счет поворота рукоятки оси малого и большого кулачков.
В автоматизированном измерителе выходных характеристик спиральных пружин в качестве источника света используется точечный лазер.
В автоматизированном измерителе выходных характеристик спиральных пружин в качестве фотоприемника используется фоторезистор.
В автоматизированном измерителе выходных характеристик спиральных пружин зажимные элементы выполнены из упругого материала.
В автоматизированном измерителе выходных характеристик спиральных пружин опоры выходного вала в зависимости от точности измерения изготовлены на основе камневых или ножевых опор.
В автоматизированном измерителе выходных характеристик спиральных пружин подвижный стол имеет установочное углубление для установки пружины по наружному и центровки по внутреннему диаметрам.
Автоматизированный измеритель выходных характеристик спиральных пружин содержит опоры плеч коромысла, которое имеет возможность их касания.
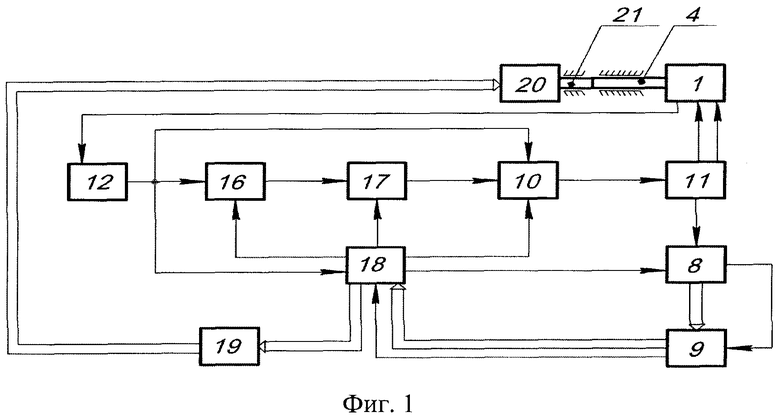
Сущность изобретения поясняется на фиг. 1 и фиг. 2, где:
фиг. 1 - структурно-функциональная схема автоматизированного измерителя выходных характеристики спиральной пружины
фиг.2 - конструкция измерительного блока
Здесь:
1 - измерительный блок;
2 - зажимной элемент внутреннего конца пружины;
3 - зажимной элемент наружного конца пружины;
4 - входной вал измерительного блока;
5 - сердечник первого электромагнита;
6 - коромысло;
7 - балансировочный груз;
8 - аналого-цифровой преобразователь;
9 - регистратор;
10 - аналого-запоминающий блок;
11 - блок управления током;
12 - компаратор;
13 - фотоприемник;
14 - источник света;
15 - зеркало;
16 - ключ;
17 - интегратор;
18 - модуль управления процессом контроля;
19 - модуль управления шаговым двигателем;
20 - шаговый двигатель;
21 - выходной вал шагового двигателя;
22 - опорная пластина;
23 - подвижный стол;
24 - колонка;
25 - пружина возврата;
26 - упор;
27 - неподвижная опора;
28 - малый кулачок;
29 - большой кулачок;
30 - выходной вал;
31 - вторая тяговая обмотка электромагнита;
32 - сердечник второго электромагнита;
33 - фиксируемая втулка;
34 - ось балансировочного груза;
35 - испытуемая пружина;
36 - первая тяговая обмотка электромагнита;
37 - опорный диск;
38 - фрикционная прокладка;
39 - подвижный диск;
40 - кулачок зажимных элементов наружного конца пружины;
41 - ось кулачка зажимных элементов наружного конца пружины;
42 - рукоятка оси кулачка зажимных элементов наружного конца пружины;
43 - корректирующий винт;
44 - подвижная пластина корректирующего винта;
45 - зажимной винт фрикциона;
46 - стойка оси кулачка зажимных элементов наружного конца пружины;
47 - ось малого и большого кулачков;
48 - рукоятка оси малого и большого кулачков;
49 - опора;
50 - ограничительный упор движения плеча коромысла.
Автоматизированный измеритель выходных характеристик спиральных пружин содержит аналого-цифровой преобразователь 8, информационный выход которого соединен с входом регистратора 9, а запускающий выход с запускающим входом регистратора 9, компаратор 12, вход которого подключен к фотоприемнику 13, а выход подключен к управляющему входу аналого-запоминающего блока 10 и входу ключа 16, выход которого соединен со входом интегратора 17, выход которого связан со входом аналого-запоминающего блока 10, выход которого соединен с входом блока 11 управления током, информационный выход которого подключен к входу аналого-цифрового преобразователя 8, а выходы управления током соединены с входами измерительного блока 1, который включает в себя зажим внутреннего конца испытуемой пружины, зажим наружного конца испытуемой пружины, входной вал 4, выходной вал 30, связанный с коромыслом 6, на конце плеча которого установлен сердечник электромагнита 5, тяговую обмотку электромагнита 36, подвижный балансировочный груз 7, фотоприемник, связанный с источником света 14 через зеркало 15 оптической системы, шаговый двигатель 20, выходной вал 21 которого соединен с входным валом 4 измерительного блока, который установлен на опоре 49, модуль управления 19 шаговым двигателем, второй электромагнит 31 с сердечником 32, расположенным симметрично и перевернуто первому на втором конце коромысла 6, причем тяговые обмотки второго 31 и первого 36 электромагнитов соединены последовательно, в центре симметрии которого установлено зеркало 15 оптической системы, модуль управления процессом контроля 18, входная шина которого соединена с выходной шиной регистратора 9, выход которого подключен к первому входу модуля 18 управления процессом контроля, второй вход связан с выходом компаратора 12, а первый выход подключен к управляющему входу ключа 16, второй выход подключен к установочному входу интегратора 17, третий выход соединен с установочным входом аналого-запоминающего блока 10, четвертый выход подключен к запускающему входу аналого-цифрового преобразователя 8, а выходная шина связана с входной шиной модуля управления шаговым двигателем 19, выходная шина которого соединена с входной шиной шагового двигателя 20, в измерительном блоке 1 зажим наружного конца испытуемой пружины содержит опорный диск 37 закрепленный по оси симметрии к внутреннему торцу входного вала 4 измерительного блока 1 и соединенный с опорной пластиной 22, а через фрикционную прокладку 38 стянут зажимным винтом 45 фрикциона с подвижным диском 39, который снабжен подвижной пластиной 44 корректирующего винта с корректирующим винтом 43, связанным с опорной пластиной 22, и на котором установлены эксцентрично перпендикулярно два зажимных элемента 3 наружного конца пружины вдоль радиуса и перпендикулярно им две стойки 46 оси кулачка зажимных элементов наружного конца пружины симметрично относительно кулачка 40 зажимных элементов наружного конца пружины на расстоянии от оси вращения подвижного диска 39, равном радиусу наружного конца исследуемой пружины 35, через которые ортогонально проходит ось 41 кулачка зажимных элементов наружного конца пружины, на которой расположен кулачок 40 зажимных элементов наружного конца пружины с возможностью касания зажимных элементов 3 наружного конца пружины для их симметричного разжима - зажима за счет поворота рукоятки 42 оси кулачка зажимных элементов наружного конца пружины, а зажим внутреннего конца испытуемой пружины содержит зажимные элементы 2 внутреннего конца пружины, закрепленные к коромыслу 6 симметрично и соосно выходному валу 30, на котором закреплена фиксируемая втулка 33, соединенная ортогонально с осью 34 балансировочного груза, на которой установлен подвижный балансировочный груз 7, при этом подвижный стол 23 установлен на колонках 24 и связан с первыми концами пружин 25 возврата, а вторые их концы подсоединены вместе с упорами 26 и колонками 24 подвижного стола 23 на неподвижной опоре 27, а малый 28 и большой 29 кулачки закреплены на оси 47 малого и большого кулачков и ориентированы друг относительно друга с возможностью касания для их симметричного разжима - зажима зажимных элементов 2 внутреннего конца пружины малым кулачком 28 и для подъема - опускания подвижного стола 23 со стороны упоров 26 большим кулачком 29 за счет поворота рукоятки 48 оси малого и большого кулачков.
В автоматизированном измерителе выходных характеристик спиральных пружин в качестве источника 14 света используется точечный лазер.
В автоматизированном измерителе выходных характеристик спиральных пружин в качестве фотоприемника 13 используется фоторезистор.
В автоматизированном измерителе выходных характеристик спиральных пружин зажимные элементы внутреннего 2 и наружного 3 концов пружины выполнены из упругого материала.
В автоматизированном измерителе выходных характеристик спиральных пружин опоры выходного вала 30 в зависимости от точности измерения изготовлены на основе камневых или ножевых опор.
В автоматизированном измерителе выходных характеристик спиральных пружин подвижный стол 23 имеет установочное углубление для установки исследуемой пружины 35 по наружному и центровки по внутреннему диаметрам.
Автоматизированный измеритель выходных характеристик спиральных пружин содержит опоры 50 плеч коромысла, которое имеет возможность их касания.
Автоматизированный измеритель выходных характеристик спиральных пружин работает следующим образом. Сначала регулируем зажимной винт 45 фрикциона для обеспечения передачи необходимого крутящего момента испытуемой пружины 35 через регулируемую фрикционную муфту (37, 38, 39) от выходного вала 21 шагового двигателя 20 и входной вал 4 к подвижному диску 39. Перед включением процесса измерения производится две балансировки коромысла 6, одна грубая, путем поворота оси 34 балансировочного груза вокруг выходного вала 30, вторая точная, путем перемещения балансировочного груза 7 по оси 34 балансировочного груза, ориентируясь на срабатывание компаратора 12 по его индикации и уравновешивания коромысла 6 при засветке оптического приемника 13. Далее устанавливаем испытуемую пружину 35 внутренним концом, вставляя внутренний отогнутый конец между разжатыми зажимными элементами 2 внутреннего конца пружины и поднятым подвижным столом 23 в установочное углубление подвижного стола 23. Затем поворачиваем рукоятку 48 оси малого и большого кулачков, удаляя касание малого кулачка 28 с зажимными элементами 2 внутреннего конца пружины, и в результате осуществляется зажим внутреннего конца испытуемой пружины 35. Дальнейшее угловое движение рукоятки 48 оси малого и большого кулачков устраняет касание подвижного стола 23 большим кулачком 29 и опускается подвижный стол 23 до упоров 26 за счет пружин 25 возврата. Это обеспечивает перпендикулярность и соосность положения испытуемой пружины 35 относительно оси выходного вала 30, а также ее жесткое, свободное и симметричное закрепление относительно коромысла 6.
Далее подводим разжатые зажимных элементов 3 наружного конца пружины кулачком 40 зажимных элементов наружного конца пружины. Поворачиваем рукоятку 42 оси кулачка зажимных элементов наружного конца пружины, устраняя касание кулачком 40 зажимных элементов наружного конца пружины зажимных элементов 3 наружного конца пружины и осуществляем зажим наружного конца испытуемой пружины 35. При этом возможно нарушение механического баланса коромысла 6 из-за наличия геометрической неточности изготовления испытуемой пружины 35, погрешности установки и закрепления внутреннего и наружного концов испытуемой пружины 35, которые устраняются путем поворота корректирующим винтом 43, подвижного диска 39.
После этого в регистратор 9 вводим номер, диапазон измерения, количество контролируемых точек характеристики испытуемой пружины 35. Далее включаем процесс контроля по команде оператора и на выходе регистратора 9, через первый вход модуля 18 управления процессом контроля, появляется сигнал, который последовательно во времени формирует сигналы: через второй и третий выходы сброс выходного сигнала интегратора 17 и аналого-запоминающего блока 10 в нулевое значение, а через первый выход модуль 18 управления процессом контроля открывает ключ 16 для прохождения сигнала от компаратора 12 к интегратору 17, затем поворачивает шаговый двигатель 20 до первой точки контроля характеристики серией импульсов, соответствующей повороту на заданный угол и задается соответствующий измеряемый момент, который передается через испытуемую пружину 35 к коромыслу 6, которое отклоняется от равновесия и упирается в ограничительный упор 50 движения коромысла, а через ключ 16, интегратор 17 и аналого-запоминающий блок 10 создает плавно нарастающий ток в первой 36 и второй 31 тяговых обмотках электромагнитов для компенсации созданного момента. В момент уравновешивания коромысла 6 срабатывает компаратор 12, фиксируя механический баланс коромысла 6 в результате засветки источником света 14 через зеркало 15 фотоприемника 13, включает аналого-запоминающий блок 10 и через второй вход модуля 18 управления процессом контроля запускает с четвертого выхода аналого-цифровой преобразователь 8 для фиксации цифровой информации о значении созданного момента по току компенсации в первой 36 и второй 31 тяговых обмотках электромагнитов, которое через информационный выход аналого-цифрового преобразователя 8 по импульсу конца измерения заносится в регистратор 9, в котором после запоминания через первый вход модуля 18 управления процессом контроля запускает по заложенной программе в регистраторе 9 процесс контроля следующей точки измерения характеристики испытуемой пружины 35. Этот периодический процесс продолжается до окончания заданного диапазона измерения, т.е. количества точек измерения. В процессе контроля можно, например, индицировать программно на экране регистратора 9 заданные параметры контроля выходных характеристик испытуемой пружины 35 в виде графика и т.д.
Далее по программе регистратора 9 через блок 18 управления процессом контроля последовательно закрывается ключ 16, обнулятся информация интегратора 17 и аналого-запоминающего блока 10, включается непрерывное реверсирование шагового двигателя 20 в нулевую исходную точку начала процесса контроля, которая фиксируется срабатыванием компаратора 12 при засветке источником 14 света через зеркало 15 фотоприемника 13.
После этого производим подъем подвижного стола 23 и разжим внутреннего конца испытуемой пружины 35 путем поворота рукоятки 48 оси малого и большого кулачков до касания зажимных элементов 2 внутреннего конца пружины и подвижного стола 23, а далее разжим наружного конца испытуемой пружины 35 поворотом рукоятки 42 оси кулачка зажимных элементов 3 наружного конца пружины, а затем вынимаем испытуемую пружину 35 из измерительного блока 1.
По результатам набора в регистраторе 9 информации о необходимой выборке испытуемых пружин 35 включается программа регистратора на обработку и отбор парных испытанных пружин 35 с заданной точностью подбора.
Все блоки и модули в измерителе реализуются на известных аналоговых и цифровых интегральных микросхемах и электромеханических элементах.
Таким образом, заявляемый автоматизированный измеритель выходных характеристик спиральных пружин позволяет в повысить эффективность работы стенда путем увеличения точности измерения из-за уменьшения порога чувствительности уменьшением трения в опорах выходного вала за счет ввода второго электромагнита с сердечником, который совместно с первым обеспечивает дифференциальное воздействие на плечи коромысла при уравновешивании и расширяет диапазон измерения максимального момента закручивание испытуемой пружины, увеличить точность измерения за счет однозначности закрепления внутреннего конца испытуемой пружины относительно обеспечения перпендикулярности к выходному валу и подвижного стола с углублением, улучшить производительность из-за увеличения динамических характеристик процесса контроля путем ввода шагового двигателя и ограничительных упоров движения плеч коромысла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| Автоматизированный измеритель выходных характеристик спиральных пружин | 2014 |
|
RU2608330C2 |
| Автоматизированный измеритель момента спиральных пружин | 2017 |
|
RU2676220C1 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2012 |
|
RU2526553C2 |
| Стенд для контроля выходных характеристик спиральных пружин | 1990 |
|
SU1732196A1 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 1993 |
|
RU2075895C1 |
| Автоматизированный стенд контроля круговых потенциометров | 2019 |
|
RU2725887C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Устройство для воспроизведения малых угловых скоростей | 1990 |
|
SU1720023A1 |
Изобретение относится к области измерительной техники. Отличительной особенностью заявленного автоматизированного измерителя выходных характеристик спиральных пружин является то, что в него введены шаговый двигатель, выходной вал которого соединен с входным валом измерительного блока, который установлен на опоре, модуль управления шаговым двигателем, второй электромагнит с сердечником, расположенным симметрично и перевернуто первому на втором конце коромысла, причем тяговые обмотки второго и первого электромагнитов соединены последовательно, в центре симметрии которого установлено зеркало оптической системы, модуль управления процессом контроля, входная шина которого соединена с выходной шиной регистратора, выход которого подключен к первому входу модуля управления процессом контроля, второй вход связан с выходом компаратора, а первый выход подключен к управляющему входу ключа, второй выход подключен к установочному входу интегратора, третий выход соединен с установочным входом аналого-запоминающего блока, четвертый выход подключен к запускающему входу аналого-цифрового преобразователя. Техническим результатом является повышение эффективности работы. 7 з.п. ф-лы, 2 ил.
1. Автоматизированный измеритель выходных характеристик спиральных пружин, содержащий аналого-цифровой преобразователь, информационный выход которого соединен с входом регистратора, а запускающий выход с запускающим входом регистратора, компаратор, вход которого подключен к фотоприемнику, а выход подключен к управляющему входу аналого-запоминающего блока и входу ключа, выход которого соединен с входом интегратора, выход которого связан с входом аналого-запоминающего блока, выход которого соединен с входом блока управления током, информационный выход которого подключен к входу аналого-цифрового преобразователя, а выходы управления током соединены с входами измерительного блока, который включает в себя зажим внутреннего конца испытуемой пружины, зажим наружного конца испытуемой пружины, входной вал, выходной вал, связанный с коромыслом, на конце плеча которого установлен сердечник электромагнита, тяговую обмотку электромагнита, подвижный балансировочный груз, фотоприемник, связанный с источником света через зеркало оптической системы, отличающийся тем, что в него введены шаговый двигатель, выходной вал которого соединен с входным валом измерительного блока, который установлен на опоре, модуль управления шаговым двигателем, второй электромагнит с сердечником, расположенным симметрично и перевернуто первому на втором конце коромысла, причем тяговые обмотки второго и первого электромагнитов соединены последовательно, в центре симметрии которого установлено зеркало оптической системы, модуль управления процессом контроля, входная шина которого соединена с выходной шиной регистратора, выход которого подключен к первому входу модуля управления процессом контроля, второй вход связан с выходом компаратора, а первый выход подключен к управляющему входу ключа, второй выход подключен к установочному входу интегратора, третий выход соединен с установочным входом аналого-запоминающего блока, четвертый выход подключен к запускающему входу аналого-цифрового преобразователя, а выходная шина связана с входной шиной модуля управления шаговым двигателем, выходная шина которого соединена с входной шиной шагового двигателя.
2. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 1, отличающийся тем, что в измерительном блоке зажим наружного конца испытуемой пружины содержит опорный диск, закрепленный по оси симметрии к внутреннему торцу входного вала измерительного блока и соединенный с опорной пластиной, а через фрикционную прокладку стянут зажимным винтом фрикциона с подвижным диском, который снабжен подвижной пластиной корректирующего винта с корректирующим винтом, связанным с опорной пластиной, и на котором установлены эксцентрично перпендикулярно два зажимных элемента наружного конца пружины вдоль радиуса и перпендикулярно им две стойки оси кулачка зажимных элементов наружного конца пружины симметрично относительно кулачка зажимных элементов наружного конца пружины на расстоянии от оси вращения подвижного диска, равном радиусу наружного конца исследуемой пружины, через которые ортогонально проходит ось кулачка зажимных элементов наружного конца пружины, на которой расположен кулачок зажимных элементов наружного конца пружины с возможностью касания зажимных элементов наружного конца пружины для их симметричного разжима - зажима за счет поворота рукоятки оси кулачка зажимных элементов наружного конца пружины, а зажим внутреннего конца испытуемой пружины содержит зажимные элементы внутреннего конца пружины, закрепленные к коромыслу симметрично и соосно выходному валу, на котором закреплена фиксируемая втулка, соединенная ортогонально с осью балансировочного груза, на которой установлен подвижный балансировочный груз, при этом подвижный стол установлен на колонках и связан с первыми концами пружин возврата, а вторые их концы подсоединены вместе с упорами и колонками подвижного стола на неподвижной опоре, а малый и большой кулачки закреплены на оси малого и большого кулачков и ориентированы друг относительно друга с возможностью касания для их симметричного разжима - зажима зажимных элементов внутреннего конца пружины малым кулачком и для подъема - опускания подвижного стола со стороны упоров большим кулачком за счет поворота рукоятки оси малого и большого кулачков.
3. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 1, отличающийся тем, что в качестве источника света используется точечный лазер.
4. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 1, отличающийся тем, что в качестве фотоприемника используется фоторезистор.
5. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 2, отличающийся тем, что зажимные элементы внутреннего и наружного концов пружины выполнены из упругого материала.
6. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 2, отличающийся тем, что опоры выходного вала в зависимости от точности измерения изготовлены на основе камневых или ножевых опор.
7. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 2, отличающийся тем, что подвижный стол имеет установочное углубление для установки исследуемой пружины по наружному и центровки по внутреннему диаметрам.
8. Автоматизированный измеритель выходных характеристик спиральных пружин по п. 2, отличающийся тем, что содержит опоры плеч коромысла, которое имеет возможность их касания.
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2012 |
|
RU2526553C2 |
| Стенд для контроля выходных характеристик спиральных пружин | 1990 |
|
SU1732196A1 |
| Статор электрической машины переменного тока | 1982 |
|
SU1070654A1 |
| ПОЛУАВТОМАТ ДЛЯ ПРОВЕРКИ КРУТЯЩИХ МОМЕНТОВ СПИРАЛЬНЫХ ПРУЖИН | 1971 |
|
SU433367A1 |
| Самосвальный кузов транспортного средства для перевозки легковесных грузов | 1981 |
|
SU965828A2 |

