20
18 20
15
11
Ы Ю

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный шаговый электродвигатель | 1991 |
|
SU1831752A3 |
| Универсальный шаговый электродвигатель | 1990 |
|
SU1815754A1 |
| Шаговый электродвигатель | 1987 |
|
SU1711301A1 |
| Поляризованный электромеханический преобразователь для электрочасов | 1984 |
|
SU1277061A1 |
| Однофазный синхронный электродвигатель | 1982 |
|
SU1137555A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| Шаговый электродвигатель | 1984 |
|
SU1669060A1 |
| Однофазный синхронный электродвигатель | 1982 |
|
SU1130968A1 |
| Шаговый электродвигатель | 1980 |
|
SU934567A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ "ОУРИРПС-2" | 1989 |
|
RU2027289C1 |





































Изобретение относится к технологии изготовления электрических машин и может быть использовано в электротехнической промышленности. Цель изобретения - расширение конструктивно-технологических возможностей выполнения двигателя различного типогабарита, включая выполнение с числом зубцов ротора менее трех, повышение использования активного объема. Перед укладкой обмотки 1 пластины 2 и 3 магнитопровода устанавливают на разноименных торцах магнита 4 таким образом, что при отсутствии ротора полюса на концах пластин образуют радиальный паз для захода проводника. На пластины устанавливают полукаркасы 11 и 12 и осуществляют намотку обмотки 1. Затем ротор устанавливают на вал 13 и через этот же радиальный паз заводят между пластинами 2 и 3, Затем пластины 2 и 3 смещают до образования перекрытия. Между пластинами устанавливают немагнитную деталь 14 и фиксируют положение детали с помощью колонок. Вал ротора фиксируют в опорах немагнитных мостов 18 и 19, закрепленных винтами 20 в резьбовых отверстиях колонок. При сборке электродвигателя в реверсивном исполнении на пластины 2 и 3 предчарительно укла- дывают дополнительные обмотки на полукаркасзх. 2 с. и 3 з.п, ф-лы, 172 ил. (Л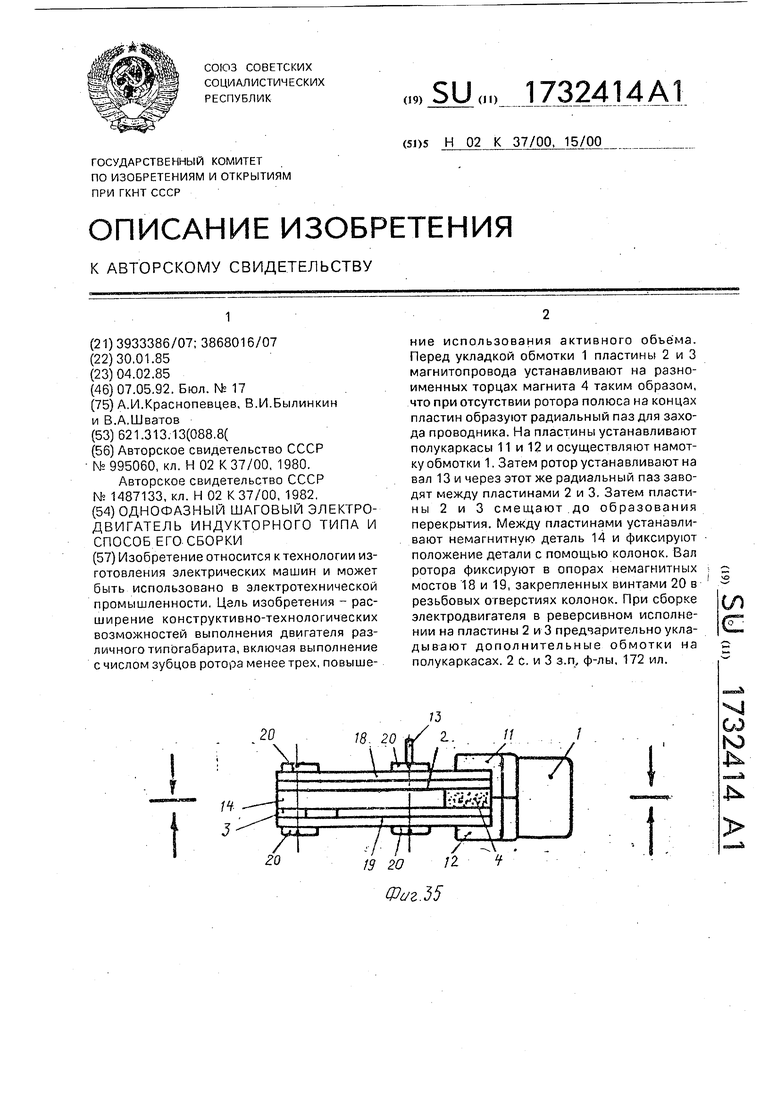
20
N
19 20 /2
Фиг 55
Изобретение относится к электротехни; ке, к области электрических машин и техно- логии их изготовления, в частности индукторных шаговых электродвигателей торцового исполнения и различного типога- барита,
Цель изобретения - расширение конструктивно-технологических возможностей выполнения двигателя различного типога- барита, включая выполнение с числом зубцов ротора менее трех, повышение использования активного объема.
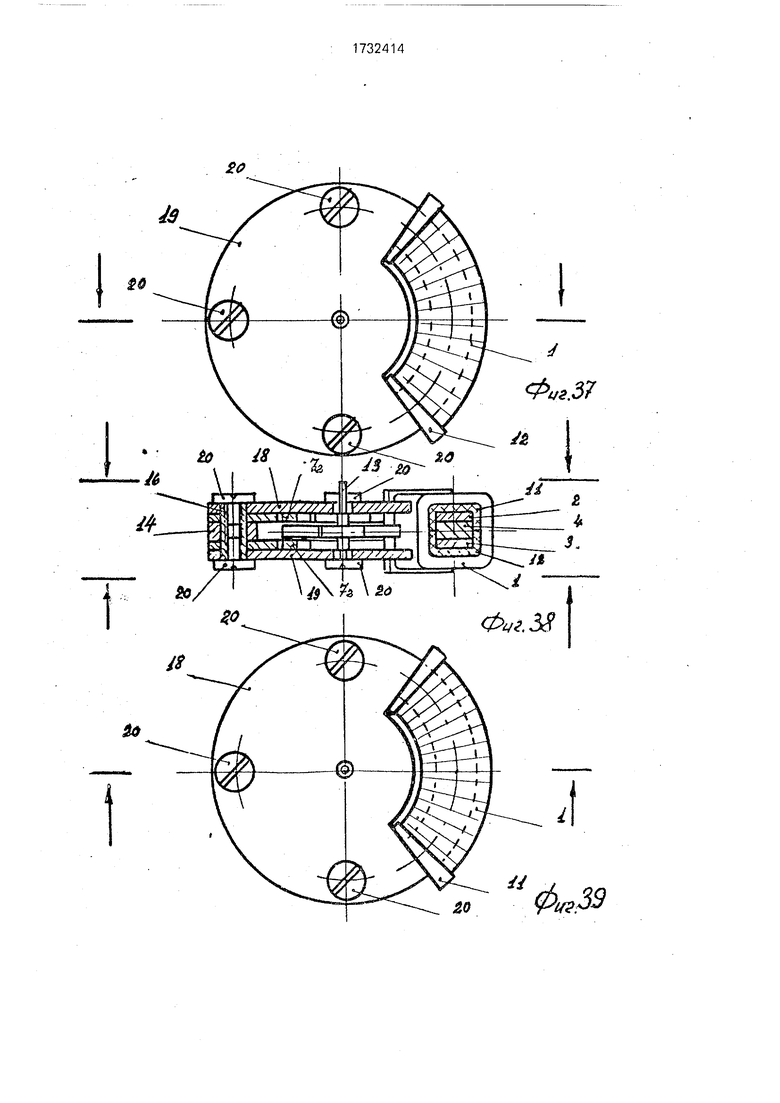
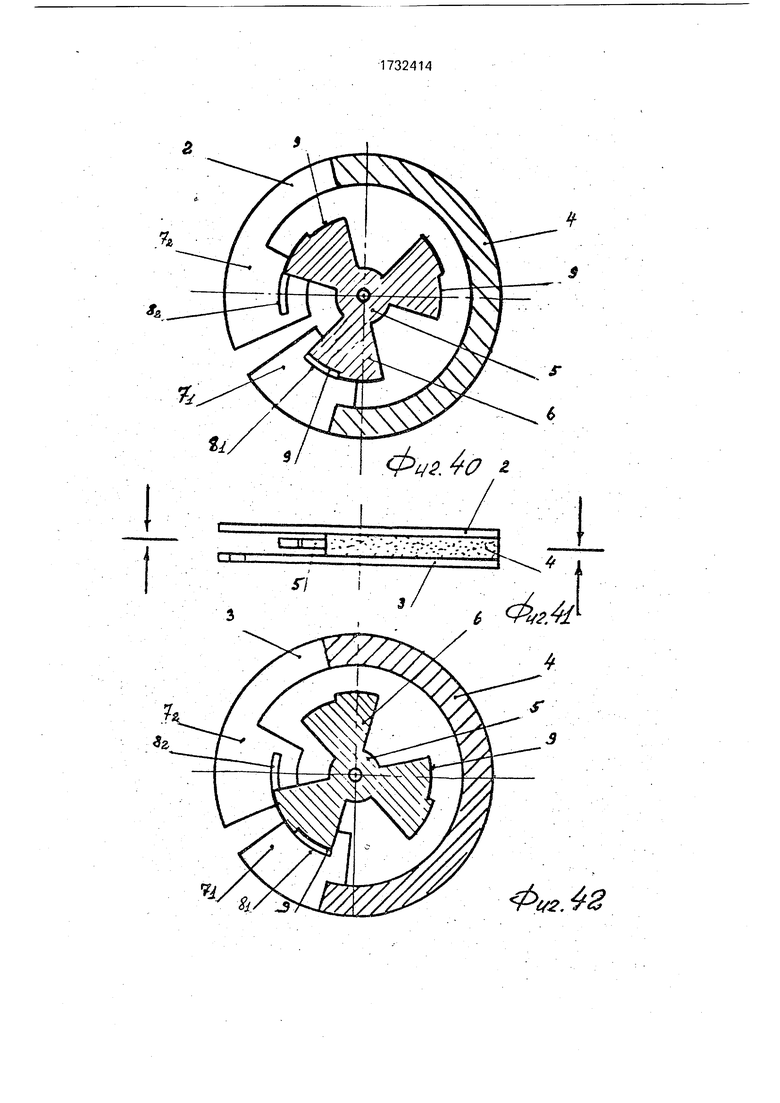
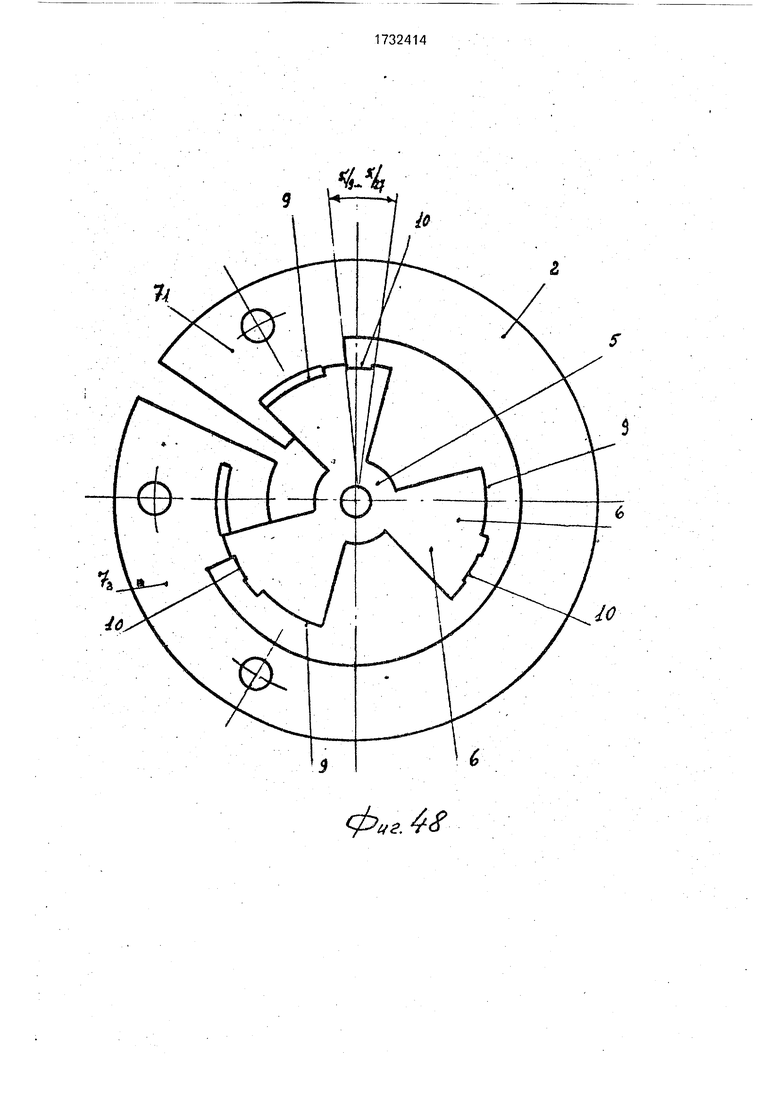
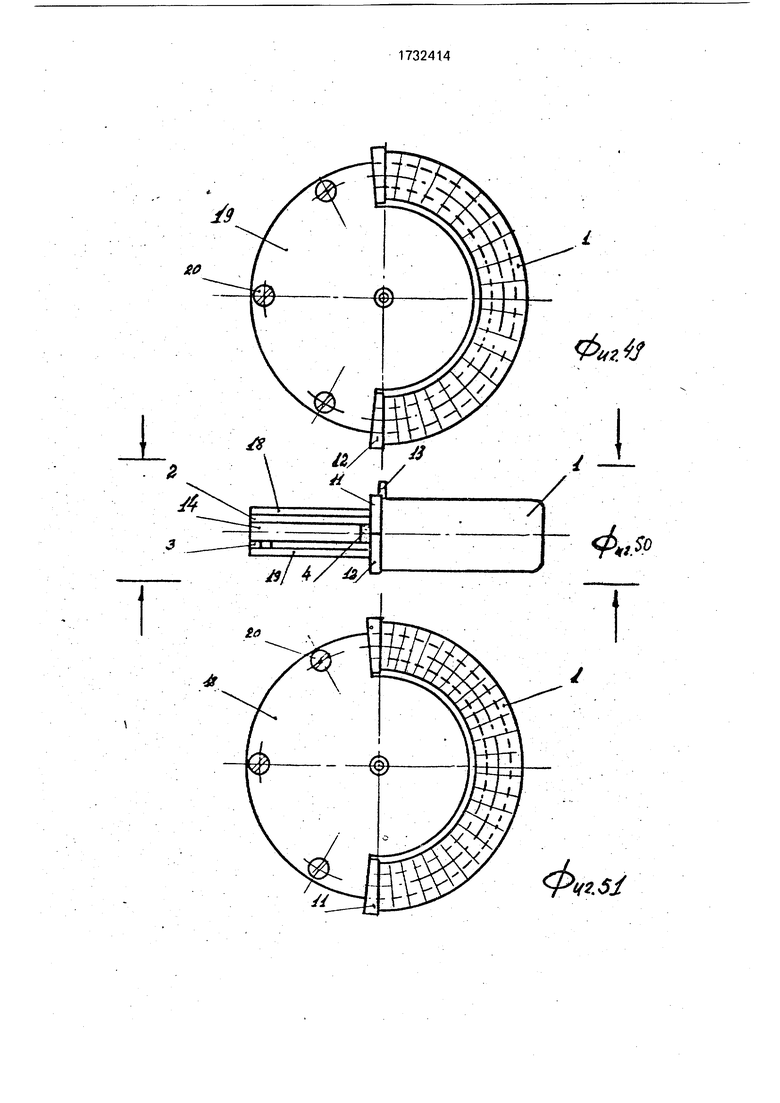
На фиг. 1-3 представлена конструкция магнитной системы, первый вариант исполнения нереверсивного двигателя, который выполнен с двухзубцовым ротором; на фиг. 4-6 - принцип возникновения активного момента с магнитной системой согласно фиг. 1-3; на фиг, 7-9 -схематичное положение, к которому стремится ротор согласно фиг. 4-6 под действием активного момента Ма, на фиг. 10-12 - принцип возникновения реактивного момента фиксации согласно фиг. 7-9; на фиг. 13-15,- положение, к которому стремится ротор согласно фиг. 10-12 под действием реактивного момента фиксации; на фиг. 16-18 - принцип возникновения активного момента двигателя при движении его ротора из положения по фиг. 13-15; на фиг. 19-21 - положение, к которому стремится ротор из положения по фиг. 16-18 под действием активного момента; на фиг. 22-24 - принцип возникновения реактивного момента при движении ротора из положения согласно фиг. 19-21; на фиг. 25 и 26 - геометрические соотношения и соотношения угловых размеров для двигателя по фиг. 1-24; на фиг. 27 - модификация магнитной системы двигателя по фиг, 1-26; на фиг. 28-30 - взаимное положение пластин сердечника обмотки двигателя по фиг. 1-27 перед выполнением намотки; на фиг. 31-33 - то положение, в которое должны быть переведены пластины сердечника после выполнения обмотки; на фиг, 34-36 - конструкция двигателя с электромагнитной системой согласно фиг. 1-33, общий вид; на фиг. 37-39 - особенности конструкции двигателя по фиг. 1-36; на фг. 40-42 - конструкция магнитной системы, второй вариант исполнения нереверсивного двигателя, который выполнен с трехзубцовым ротором; на фиг. 43-45 - принцип возникновения активного момента у двигателя с магнитной системой согласно фиг. 40-42; на фиг, 46 и 47 - соотношения угловых размеров для двигателя по фиг, 40-45; на фиг. 48 - модификация исполнения по фиг. 40-47;на фиг. 49-51 ™ внешний вид двигателя в исполнении по фиг. 40-48; на фиг. 52-54 поясняется
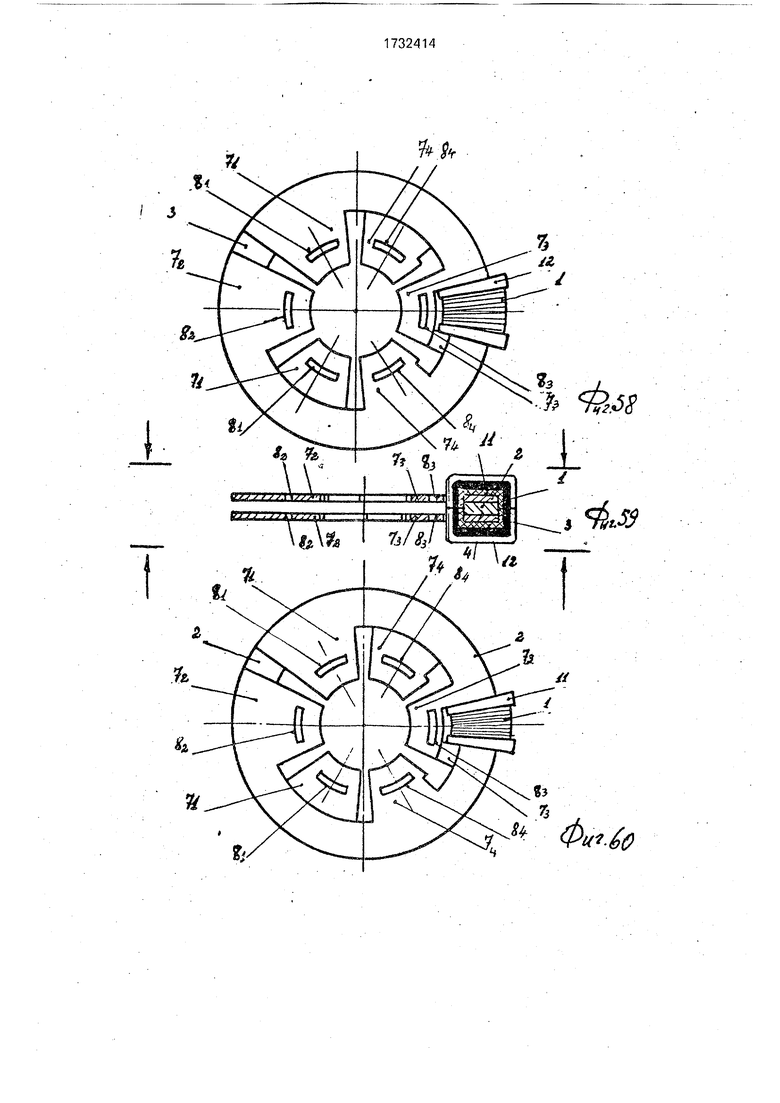
конструкция двигателя по фиг. 49-51, разрез; на фиг, 55-57 - положение пластин сердечника перед выполнением обмотки для модификации нереверсивного двигателя с трехзубцовым ротором, третий вариант; на фиг, 58-60 - положение, в которое должны быть переведены пластины сердечника у модификации по фиг. 55-57 после выполнения обмотки; на фиг. 61 и 62 - принцип
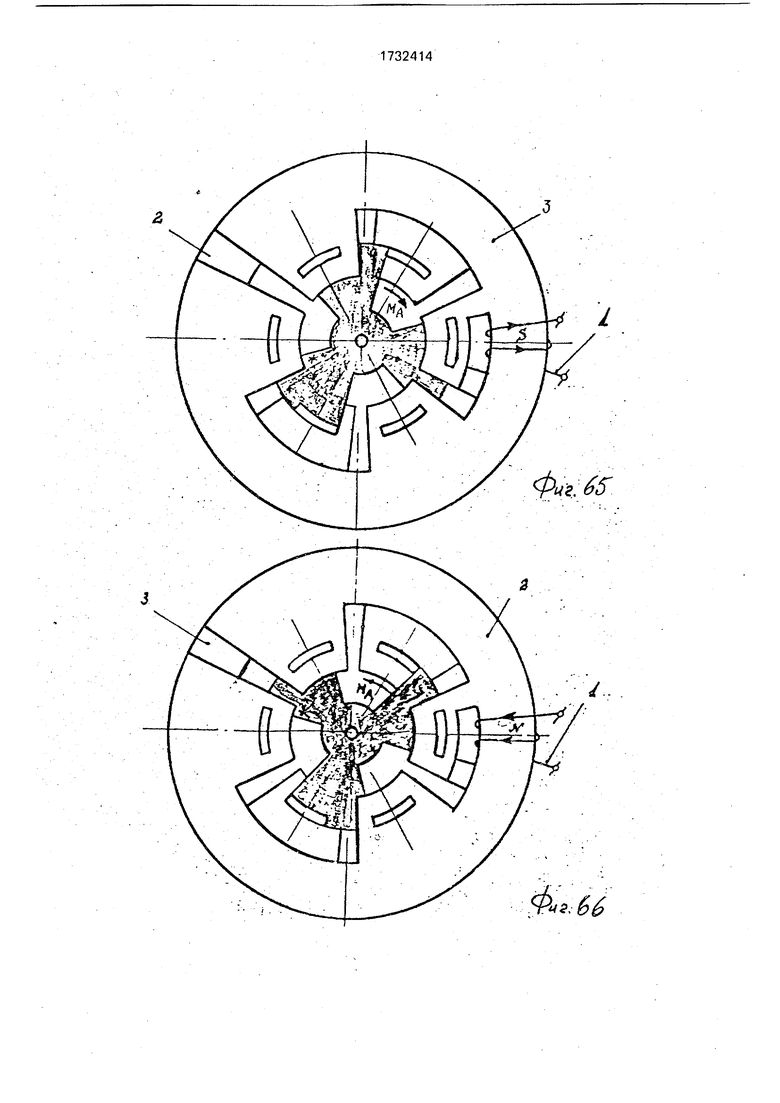
возникновения активного момента в исполнении с учетом фиг. 55-60; на фиг. 63 и 64 - принцип возникновения реактивного момента фиксации у исполнения двигателя по фиг. 55-62; на фиг, 65 и 66 - принцип возникновения активного момента для модификации по фиг, 55-64 при изменении полярности тока в обмотке; на фиг. 67 и 68
-завершение второго шага под действием реактивного момента фиксации согласно
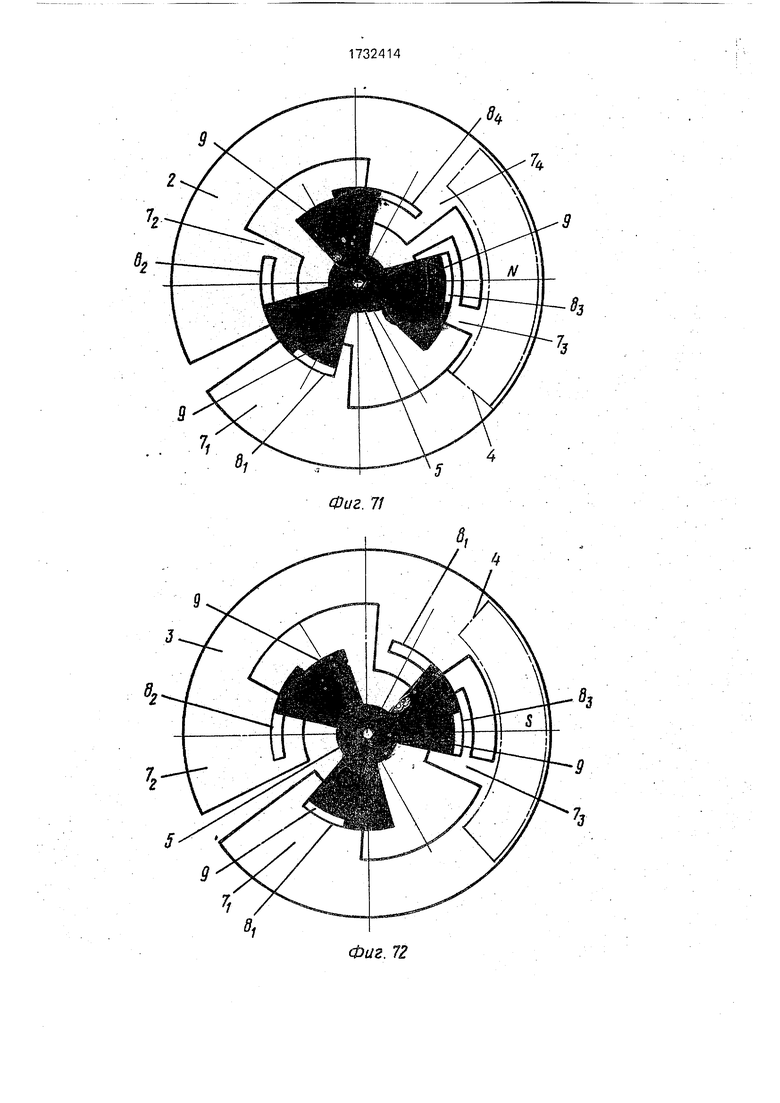
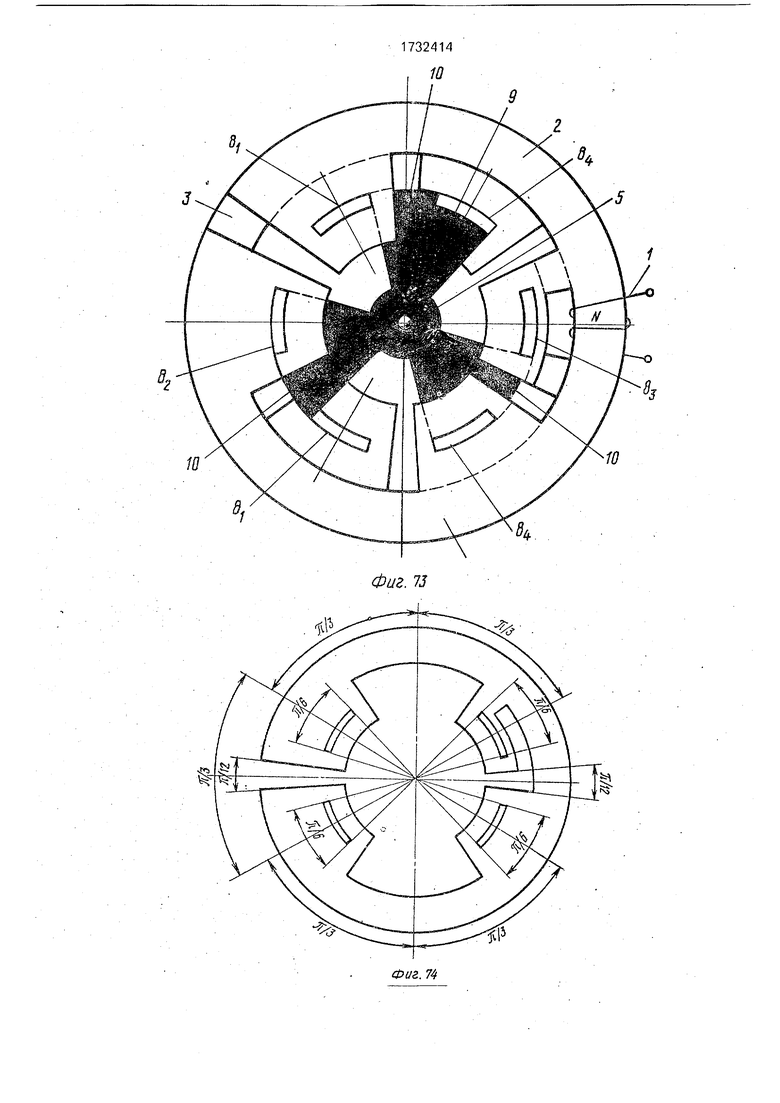
фиг. 55-66; на фиг. 69 и 70 - одно из фиксированных положений ротора по фиг, 55-68; на фиг. 71 и 72 - другое фиксированное положение ротора по фиг. 55-70; на фиг. 73
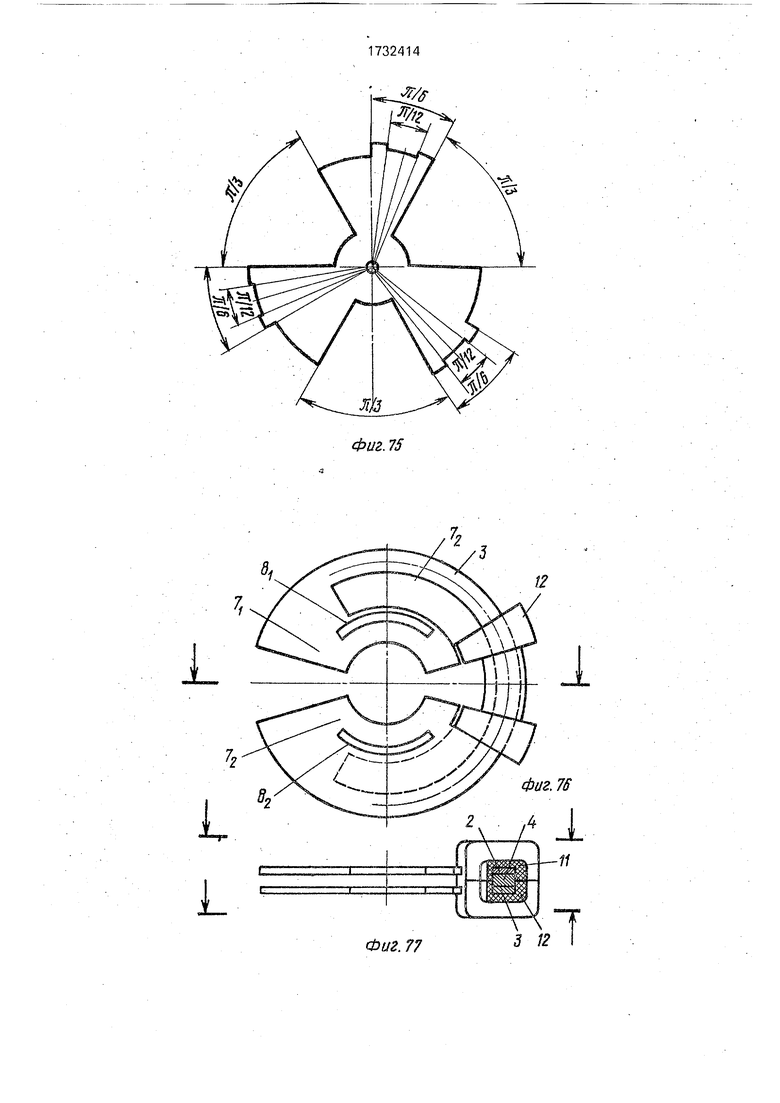
-особенности модификации двигателя по фиг. 55-72; на фиг. 74 и 75 - геометрические
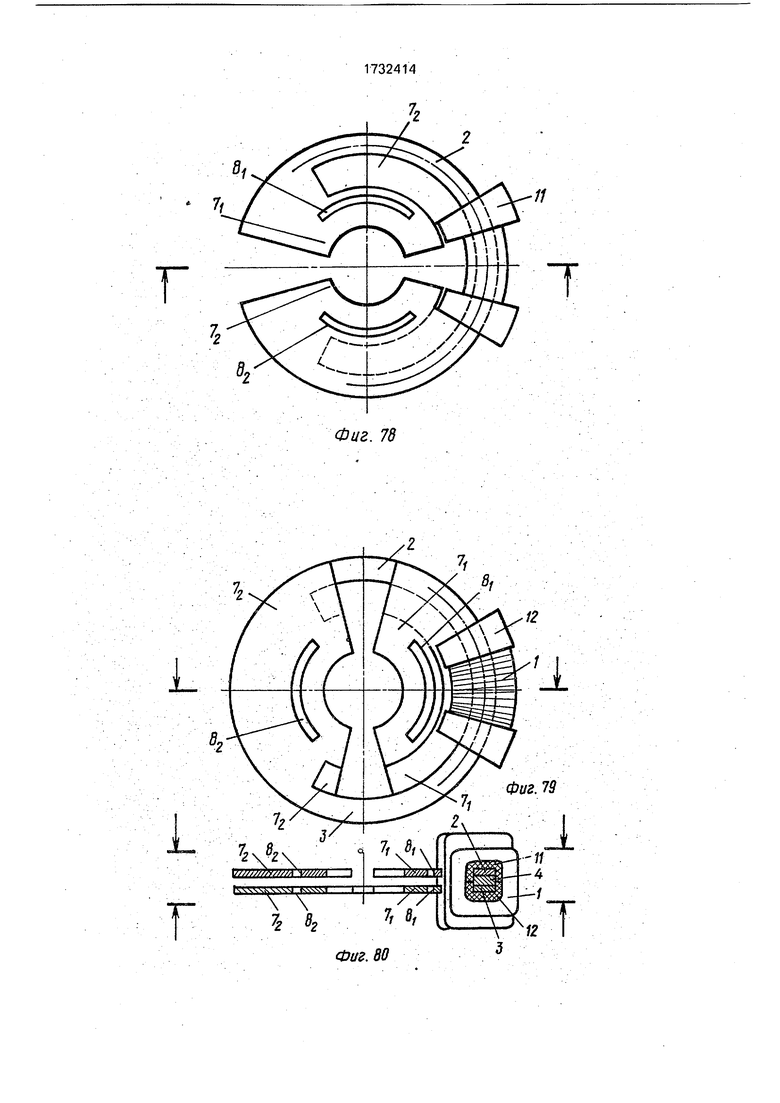
соотношения для двигателя согласно фиг. 73; на фиг. 76-78 - положение пластин сердечника перед выполнением обмотки, четвертый вариант нереверсивного двигателя,
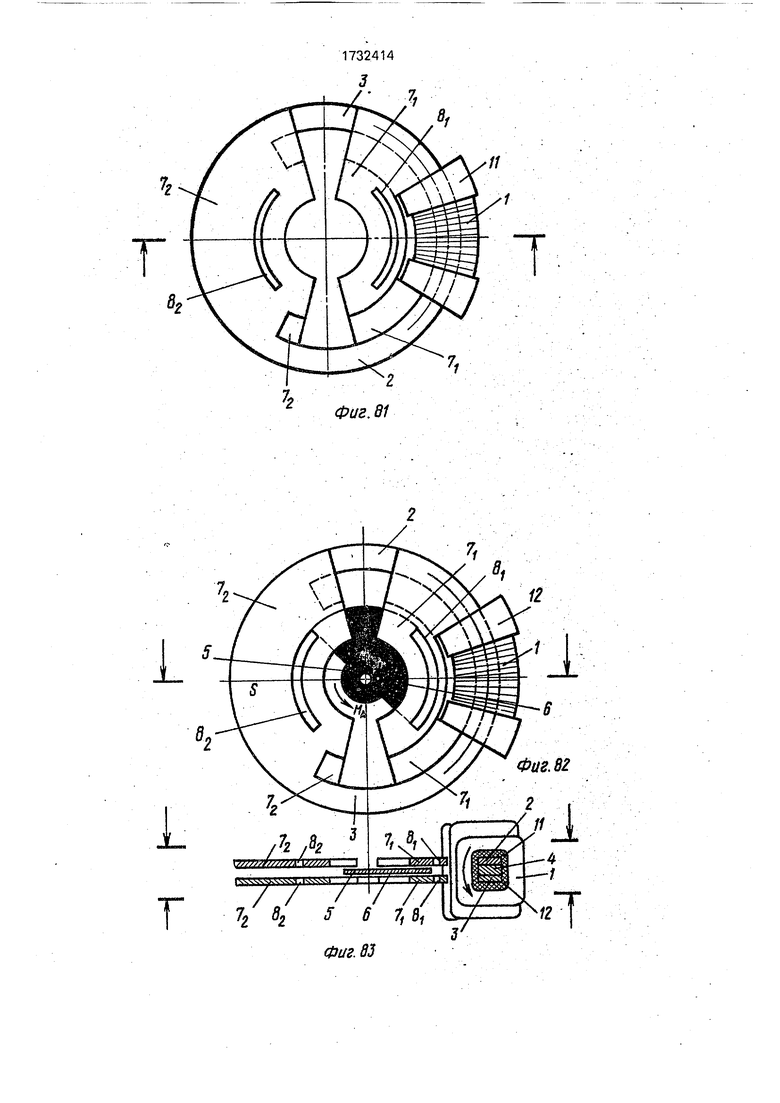
который должен работать с шагом тг; ; на фиг, 79-81 - положение, в которое должны быть переведены пластины сердечника после выполнения обмотки согласно фиг, 76- 78; на фиг. 82-84 - принцип возникновения
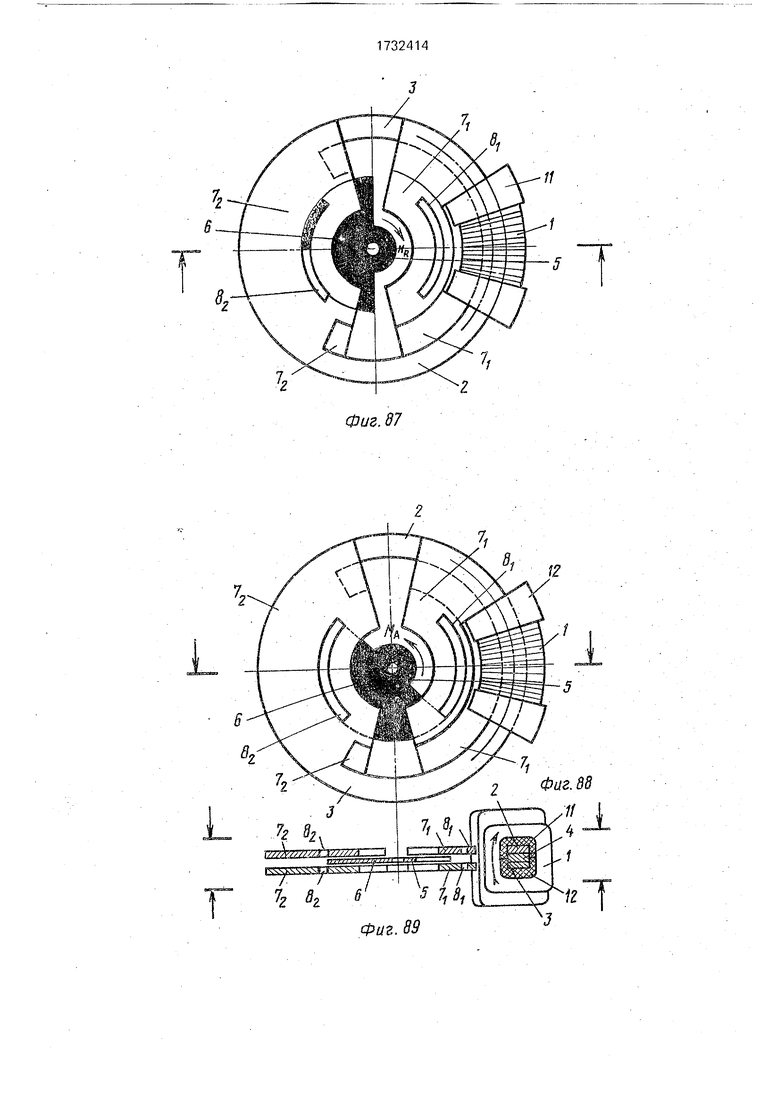
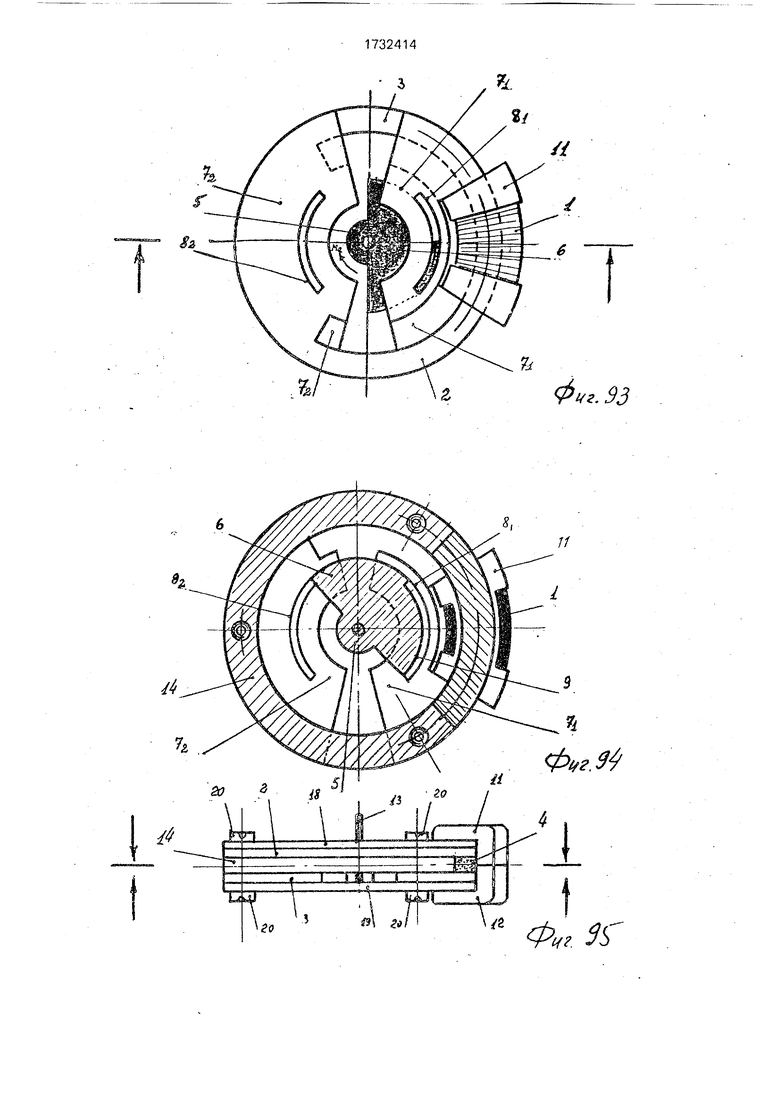
активного момента с магнитной системой согласно фиг. 76-81; на фиг. 85-87 - принцип возникновения реактивного момента согласно фиг. 76-84 при завершении шага под действием магнитной фиксации положения ротора; на фиг. 88-90 - принцип в оз- никновения активного момента при изменении полярности тока в обмотке управления двигателя по фиг. 82-84 и 88-90; на фиг. 91-93 - завершение второго шага
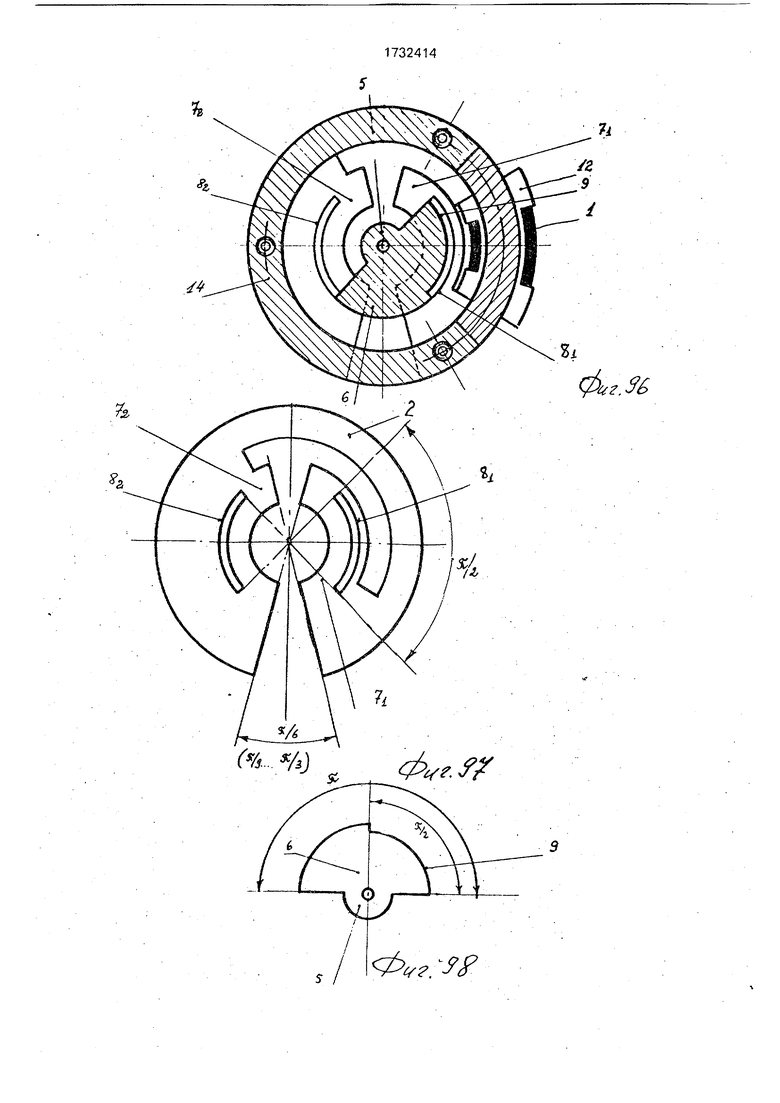
согласно фиг. 88-90 под действием реактивного момента фиксации; на фиг. 94-96 - конструкция варианта нереверсивного исполнения двигателя с однозубцовым ротором; на фиг. 97 и 98 - геометрические
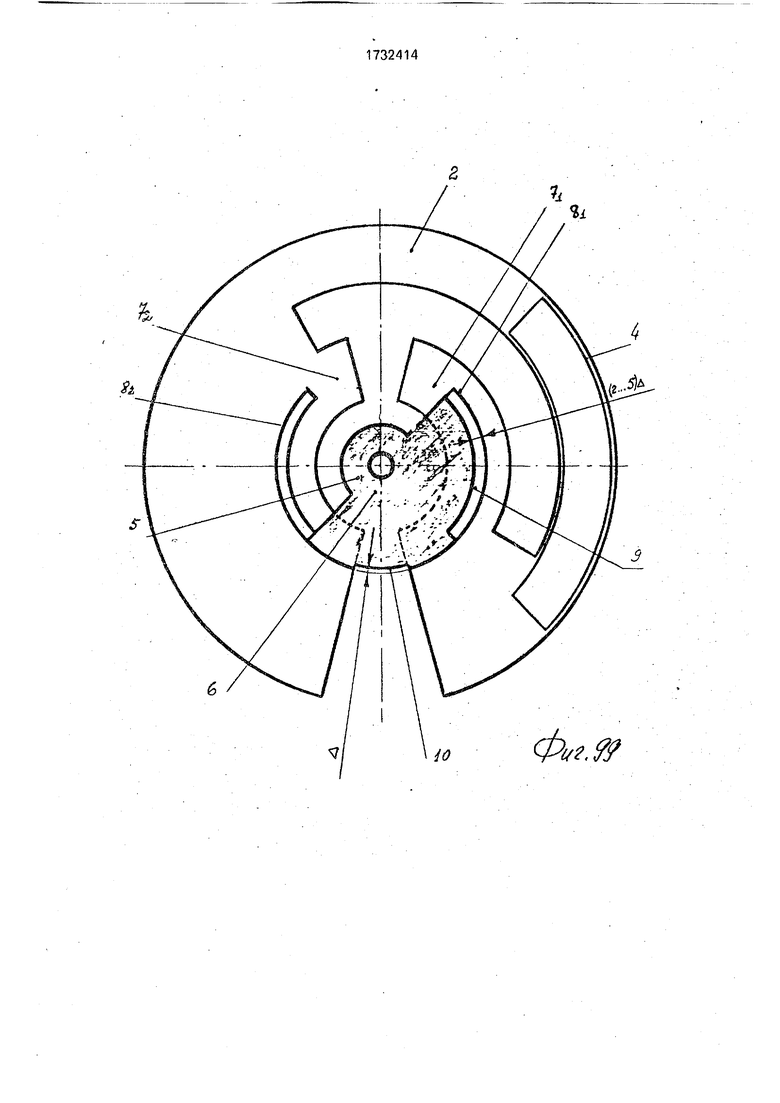
соотношения элементов магнитной системы согласно фиг. 76-96; на фиг. 99 - модификация исполнения двигателя по фиг. 76-98; на фиг. 100 - характер формирования кривой вращающего момента согласно фиг
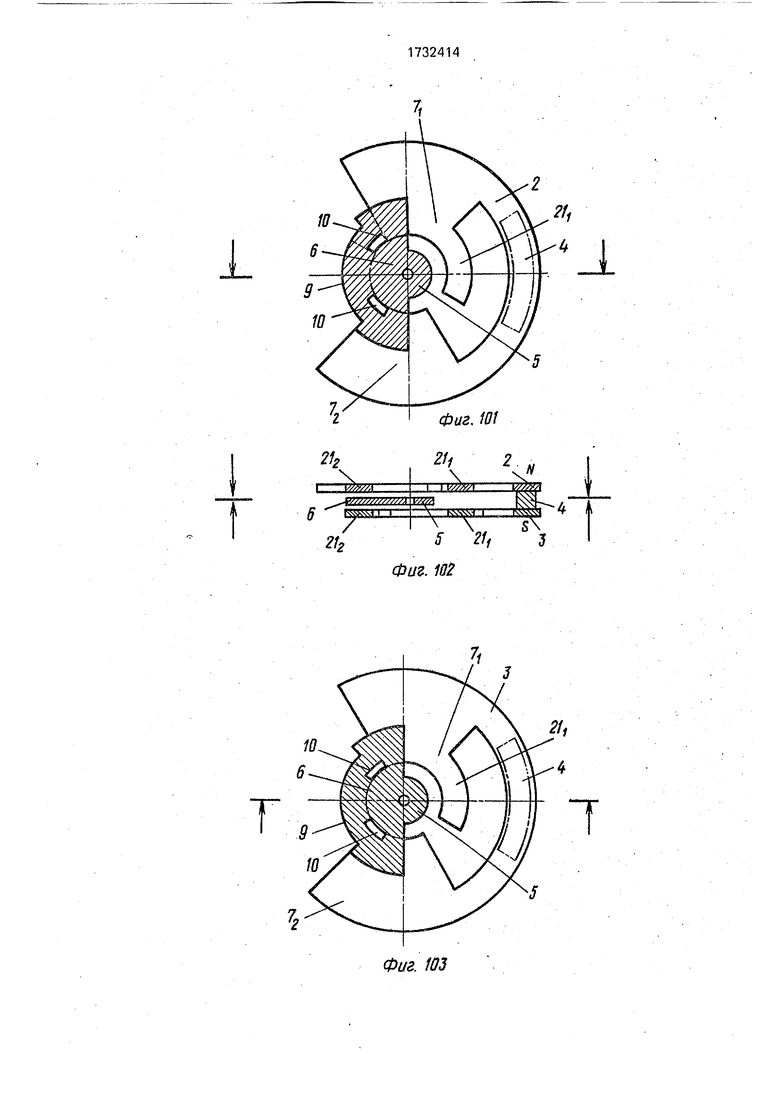
99; на фиг. 101-103 - конструкция магнитной системы первого варианта реверсивного двигателя, предназначенного для работы с шагом п; на фиг. 104-106 - принцип возникновения активного момента у двигателя
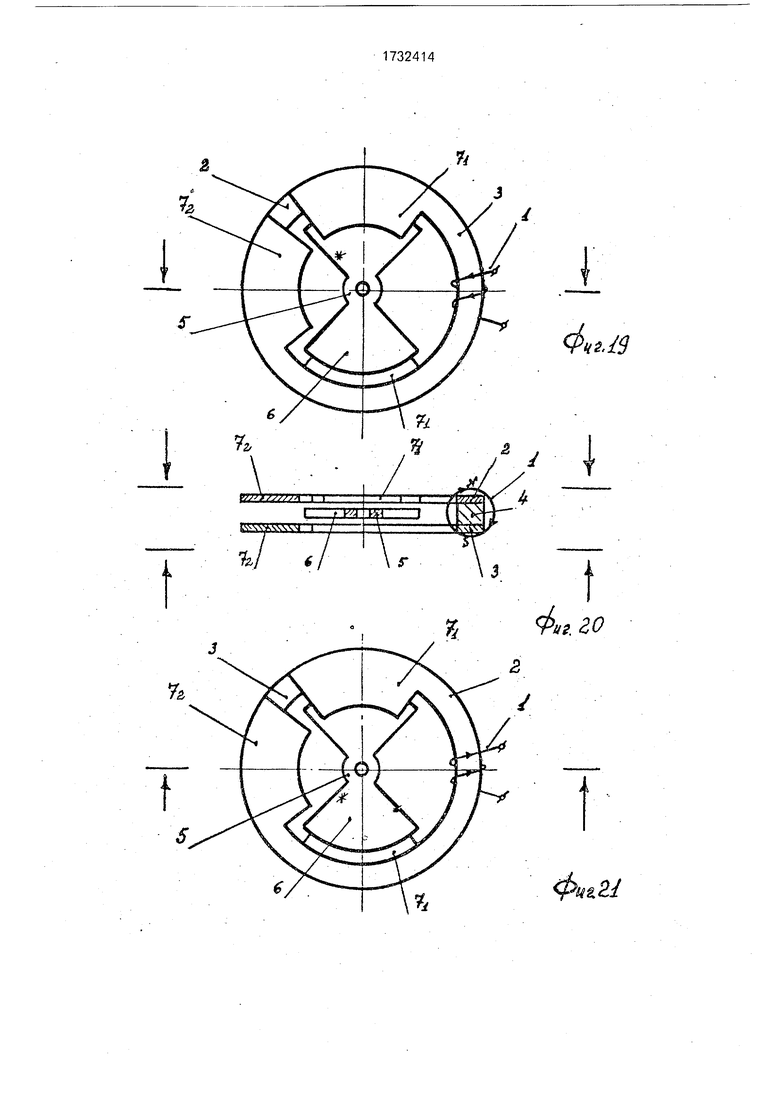
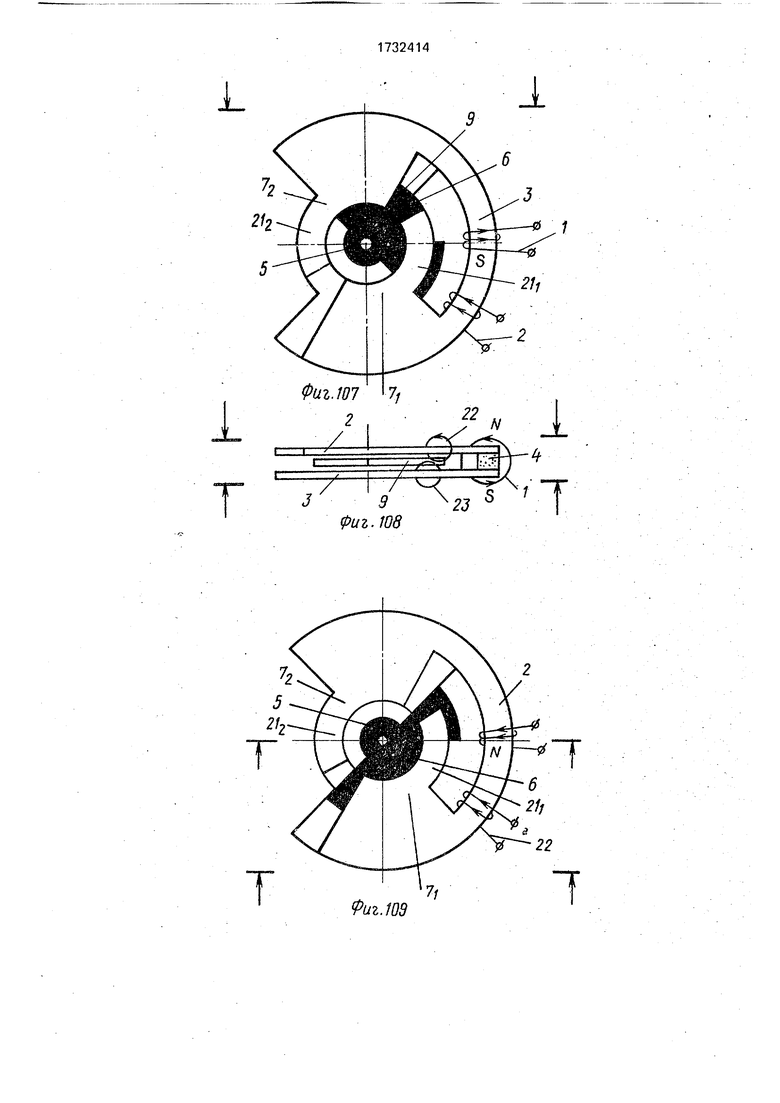
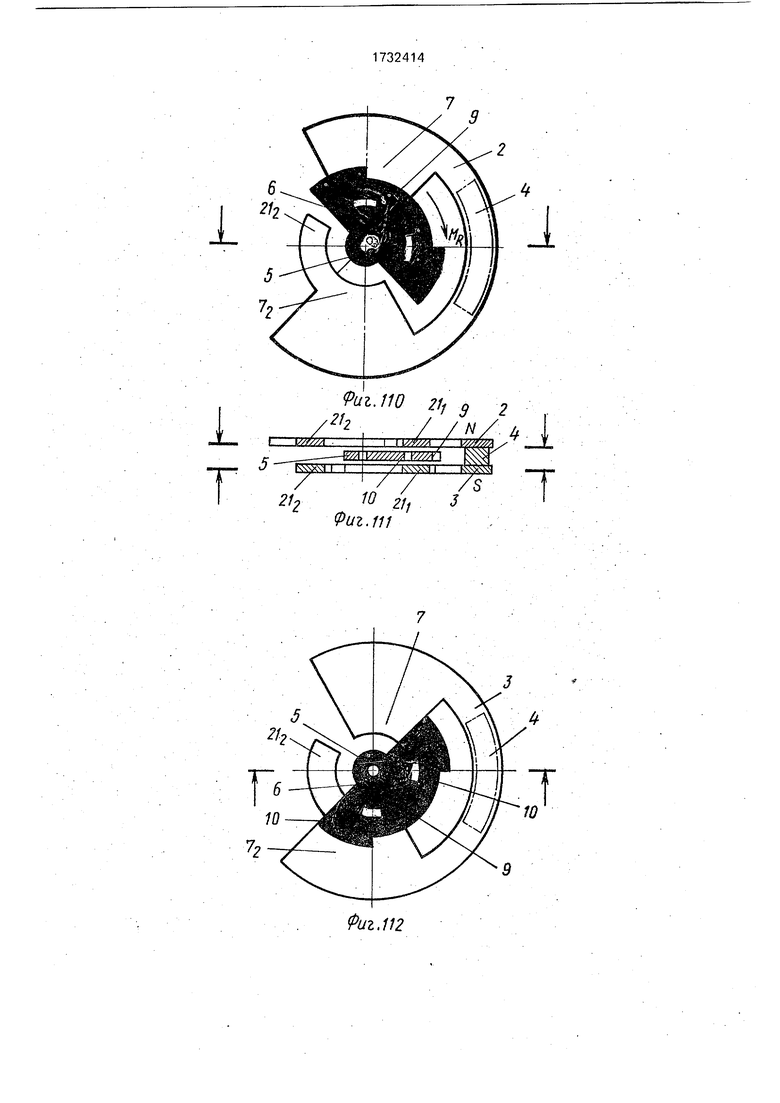
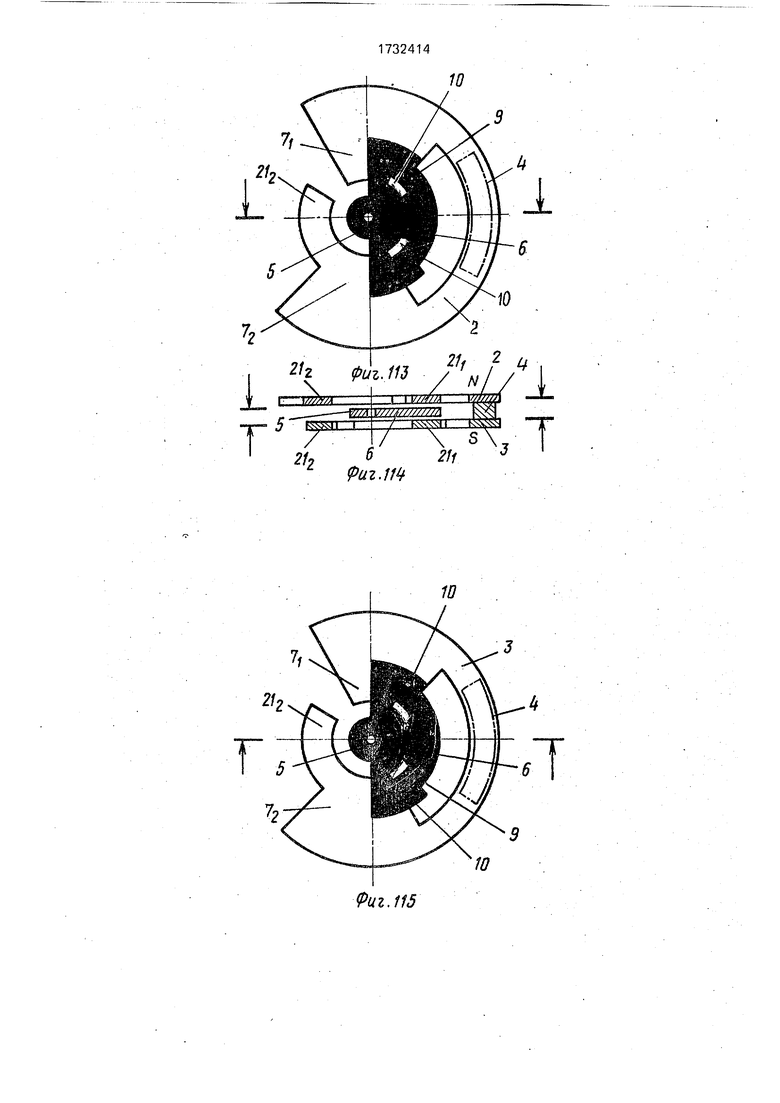
с магнитной системой по фиг, 101-103; на фиг, 107-109 - положение, к которому стремится ротор двигателя согласно фиг. 104- 106 под действием активного момента Ма; на фиг. 110-112 - принцип возникновения реактивного момента согласно фиг. 107- 109; на фиг, 113-115 - положение, к которому стремится ротор согласно фиг. 110-112 под действием реактивного момента фиксации; на фиг. 116-118- принцип возникновения активного момента с магнитной системой по фиг. 113-115; на фиг. 119-121
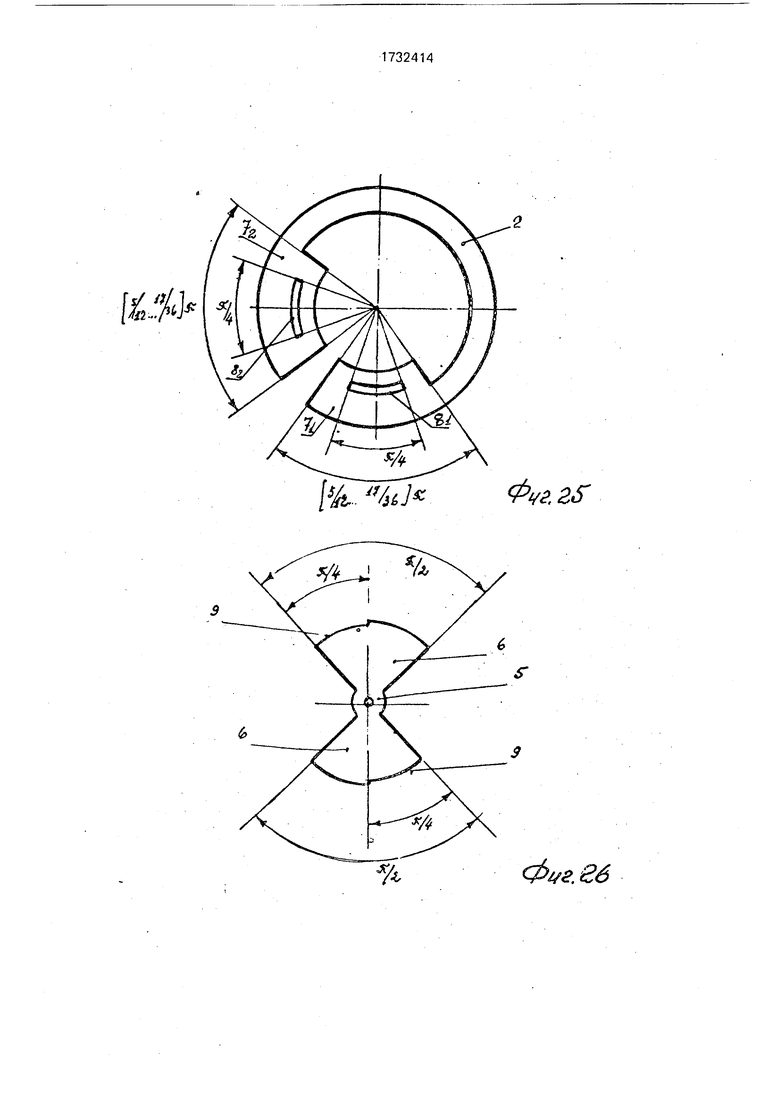
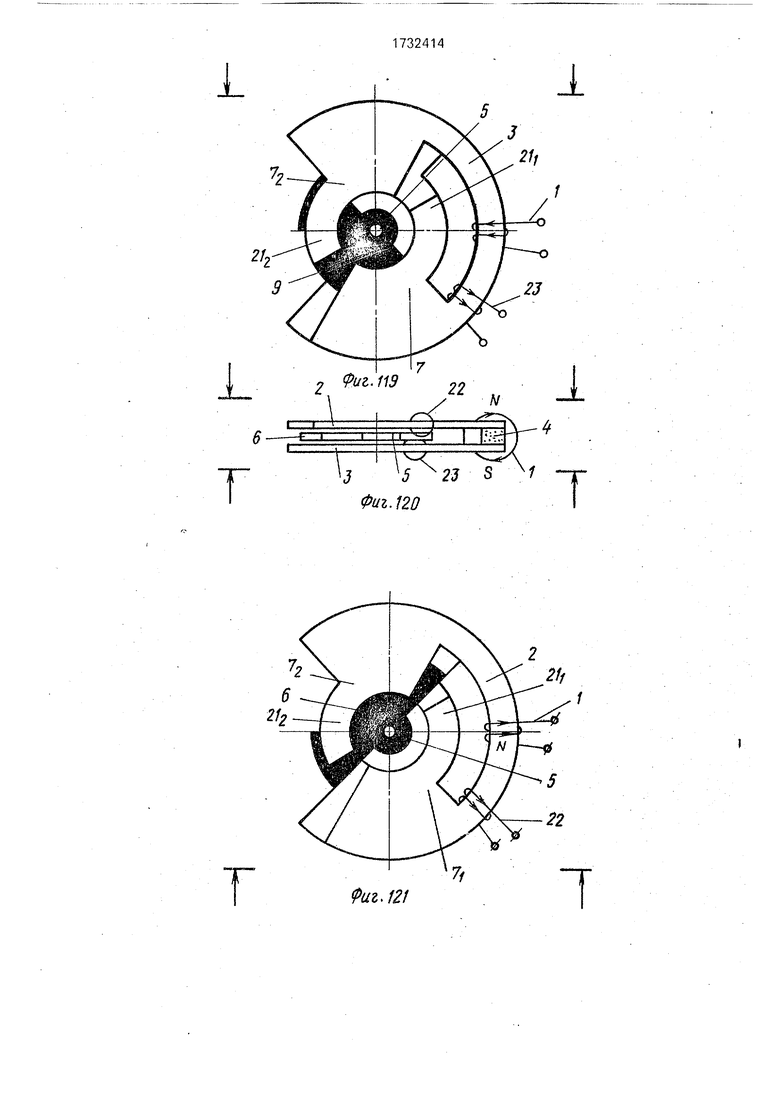
-положение, к которому стремится ротор согласно фиг. 116-118 под действием активного момента; на фиг. 122-124 - принцип возникновения peai-тивного момента согласно фиг. 119-121; на фиг, 125 и 126 - геометрические соотношения для исполнения двигателя по фиг. 101-124; на фиг. 127- 129 - модификация магнитной системы двигателя по фиг. 101-126; на фиг. 130-132
-взаиморасположение пластин сердечника двигателя с исполнением по фиг. 101-129 перед намоткой катушки; на фиг, 133-135 - положение, в которое должны быть переведены пластины сердечника после намотки катушки; на фиг. 136-138-конструкция двигателя по фиг. 101-135 в сборе; на фиг. 139- 141 - пояснение конструкции по фиг. 136-138; на фиг. 142-144 - второй вариант конструкции магнитной системы для реверсивного исполнения двигателя, который выполнен с трехзубцовым ротором; на фиг. 145-147 - принцип возникновения активного момента у двигателя согласно фиг, 142- 144; на фиг. 148 и 149 - геометрические соотношения для варианта исполнения по фиг. 142-147; на фиг. 150 - модификация конструкции согласно фиг, 142-149; на фиг 151-153 - внешний вид двигателя по фиг. 142-150; на фиг. 154-156 - конструкция согласно фиг, 151-153, рарез; на фиг, 157-159
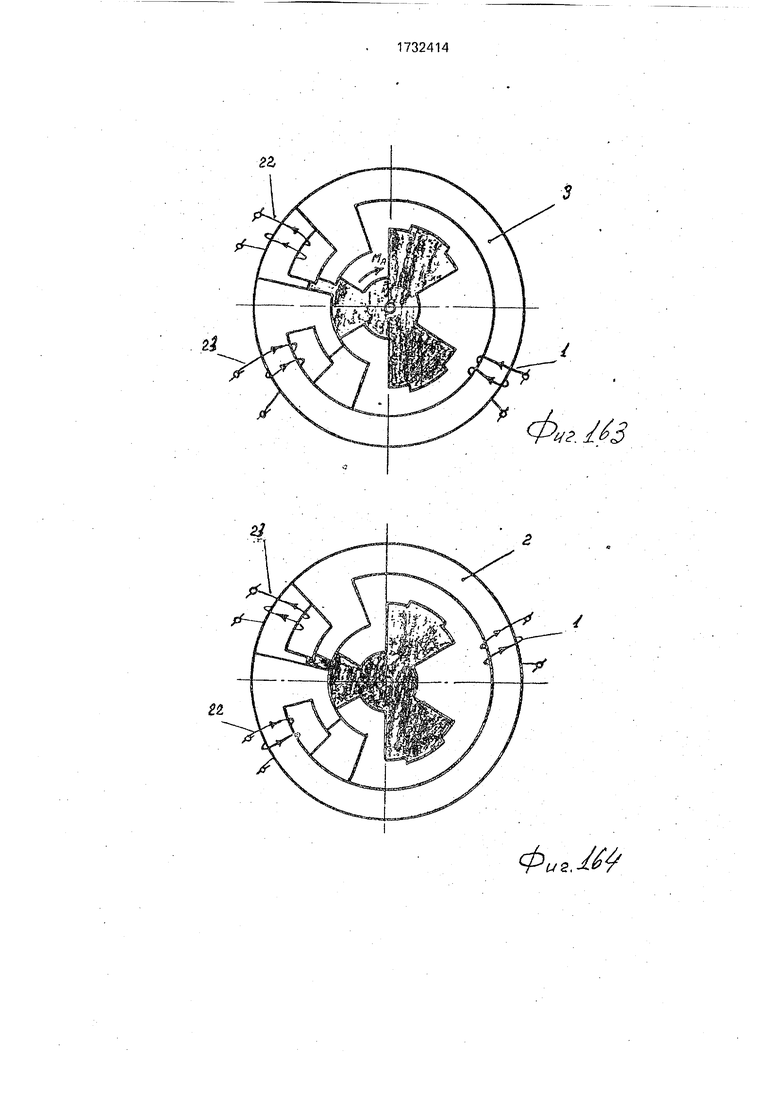
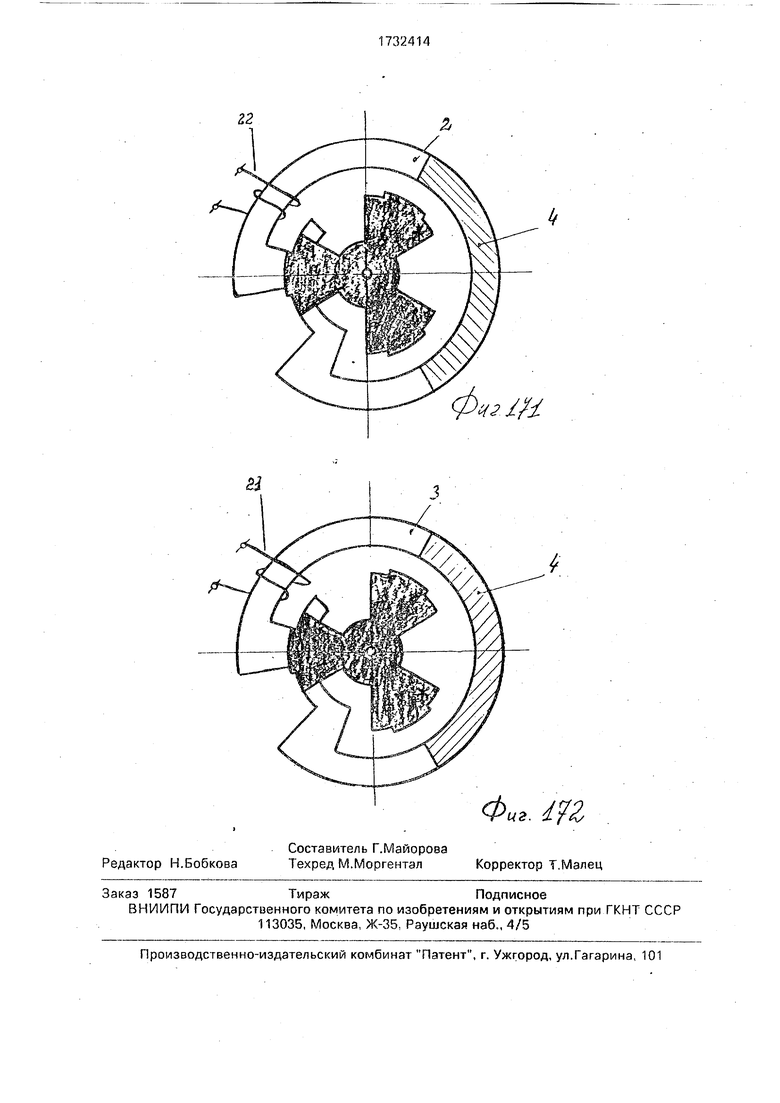
-положение пластин сердечника перед намоткой катушки для исполнения по фиг. 142-156; на фиг. 160-162 - положение, в которое должны быть переведены пластины сердечника после намотки катушки; на фиг. 163 и 164 - принцип возникновения активного момента у двигателя согласно фиг. 151-156; на фиг. 165 и 166 - принцип возникновения реактивного момента фиксации согласно фиг. 151-164; на фиг. 167 и 168 - принцип возникновения активного момента при изменении полярности тока в обмотке; на фиг, 169 и 170-завершение второго шага под действием реактивного момента согласно фиг. 151-168; на фиг. 171 и 172 -одно из фиксированных положений ротора согласно фиг. 151-170.
Шаговый двигатель в нереверсивном исполнении содержит статор с обмоткой 1 управления, расположенной на сердечнике, состоящем из одинаковых пластин 2 и 3, 5 между которыми установлен постоянный магнит 4 и размещен плоский ротор 5 с зубцами 6. На концах обеих пластин имеются полюса 7i с фиксирующими вырезами 8i и полюса 72 с фиксирующими вырезами 82.
0 Вырезы 8i и 82 взаимодействуют с фиксирующими вырезами (уступами) 9 на роторе 5. При этом середины вырезов 8i и 82 совпадают с серединами полюсов 7i и 72, а уступы 9 смещены относительно середин зубцов 6.
5 На роторе могут быть выполнены дополнительные фиксирующие вырезы (уступы) 10, улучшающие динамическое свойства двигателя. Вырезы (уступы) 10 одинаковы по угловой протяженности с промежутками
0 между ближайшими разноименными полюсами 7i и 72 пластин.
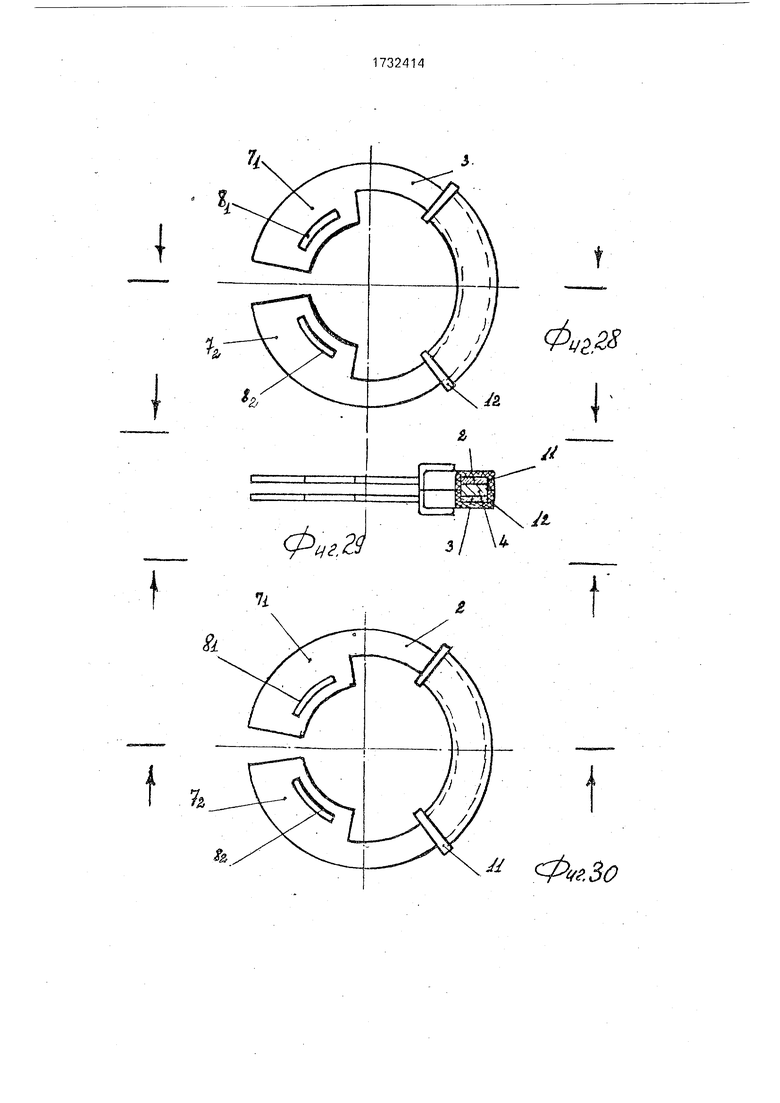
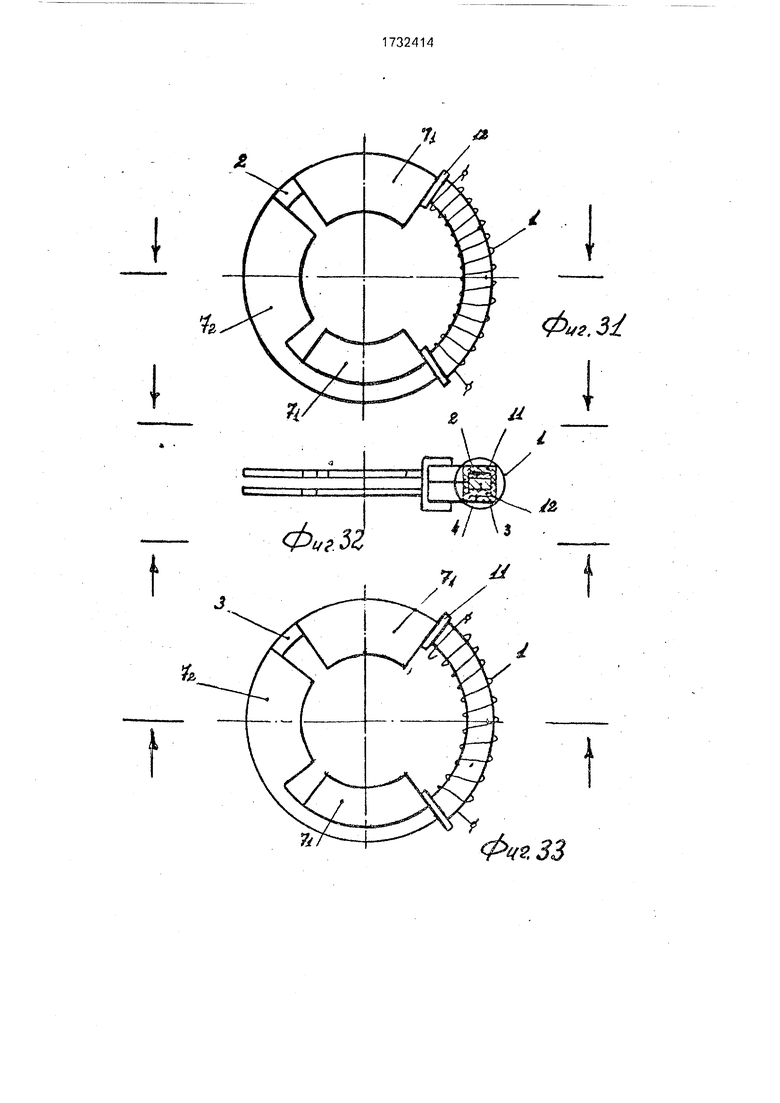
В электродвигателе (фиг. 1-39) с двух- зубцовым ротором 5 полюса 7i и 72 пластин могут быть тождественно один другому вы5 полнены на симметричных пластинах (фиг. 25). Обмотка 1 для технологичности выполнена на двух полукаркасах 11 и 12 (фиг. 28-30), Ротор 5 закреплен на валу 13 (фиг. 35, 38). Пластины 2 и 3 закреплены на немаг0 нитной детали 14 колонками 15-17 (фиг. 3436). Опоры вала 13 размещены в
немагнитных платах (мостах) 18 и 19, гзкрепленных винтами 20 (фиг. 34-36, 38)
В варианте исполнения нереверсивно5 го двигателя с трехзубцовым ротором (фиг. 40-75) могут иметь место разные случаи выполнения статора. Например, согласно фиг. 40-54 обмотка 1 может занимать более половины протяженности дуги по оси сердеч0 ника (фиг. 49-54). В этом случае полюса 7i и 72 расположены симметрично один по отношению другому (фиг. 46).
Согласно фиг. 55-75 пластины 2 и 3 выполнены наоборот асимметричными, по5 скольку в одном из полюсов (например, полюс 7з, фиг. 55) у основания предусмотрен специальный вырез для размещения обмотки 1 при смещении пластин 2 и 3 из положения по фиг. 55-57 в положение по
0 фиг. 58-60.
Аналогичный технический прием использован и в варианте исполнения нере- версивного двигателя с однозубцовым ротором (фиг. 76-99), где пластины 2 и 3
5 тоже выполнены с неодинаковыми у основания полюсами 7i и 72 для того, чтобы можно было освободить место для размещения обмотки 1 с учетом смещения пластин из положения по фиг. 76-78 в положение по фиг. 79-81.
Сборку нереверсивного двигателя (фиг, 1-100) осуществляют в такой последовательности.
Перед выполнением обмотки 1 пластины 2 и 3 магнитопровода устанавливают на разноименно полюсных торцах магнита 4 таким образом, что при отсутствии смещения между пластинами 2 и 3 ротора 5 с зубцами 6 полюса 7i и 1ч на концах пластин образуют радиальный промежуток с угло- вой протяженностью в пределах ж /9Z ... п /Зг, где z - число зубцов 6 ротора 5. Указанный промежуток служит для захода проводника при выполнении обмотки и для улучшения динамических свойств двигателя путем создания дополнительно к фиксирующему действию уступов 9 на зубцах ротора момента фиксации от взаимодействия с дополнительными уступами (или вырезами 10).
На пластины устанавливают полукаркасы 11 и 12 (фиг. 28-30) и осуществляют намотку обмотки 1. Затем ротор 5 устанавливают на вал 13 и через радиальный паз для намотки заводят между пласти- нами 2 и 3. Пластины 2 и 3 смещают по окружности на половину зубцового деления ротора, т.е. из положения по фиг. 28-30 в положение по фиг. 31-33. Между пластинами устанавливают немагнитную деталь 14 (фиг. 35, 40) и фиксируют положение пластин 2 и 3 с помощью колонок 15-17, а вал 13 ротора 5 в опорах немагнитных мостов 18 и 19, закрепляемых винтами 20 в резьбовых отверстиях колонок 15-17 (фиг. 35, 37-39).
В реверсивном исполнении (фиг, 101- 172) на полюсах 7i и i пластин 2 и 3 выполнены вместо симметричных вырезов 8i и 82 (как это имеет место в вариантах по фиг. 1-100) ассимметричиые вырезы с образова- нием выступов 211 и 212 (фиг. 125), которые расположены по разные стороны от середин полюсов 7i и 72. При этом фиксирующие Элементы - вырезы 9 и 10 в зубцах ротора (фиг. 126) расположены симметрично отно- Сительно осей зубцов (в отличие от ассимме ричного их расположения, как это сделано в нереверсивном исполнении двигателя). При Этом до выполнения обмотки 1 на каждой из пластин магнитопровода статора устанав- ливают по дополнительной обмотке 22 и 23, каждую из которых устанавливают на двух полукаркасах 24 и 25, охватывающих соответственно одну из пластин, т.е. пластину 2 или 3.
Перед выполнением обмотки 1 пластины 2 и 3 с обмотками 22 и 23 устанавливают как показано на фиг. 130-132, а после намотки 1 пластины смещают одну по отношению другой в положение по фиг. 133-135, т.е. не на половину зубцового деления как в нереверсивном исполнении, а на четверть зубцового деления ротора.
Формула изобретения
включающий установку пластин магнито- провода статора на магнит, укладку обмотки на пластины намоткой проводника, размещение ротора в статоре и установку крышек, отличающийся тем, что, с целью расширения технологических возможностей путем сборки торцовых электрических машин различных типогабаритов, перед укI
ладкой обмотки пластины разворачивают одна относительно другой до образования радиального паза, перед установкой ротора производят намотку проводника на пластины через паз, а после размещения ротора пластины разворачивают до образования перекрытия между ними.
Фиг.1
I
5
уъпф
f-ГЗГ-Г™;
5
Ј
Ч
.л ..Jc TbVSSSI
КЩ2
ГТПР777У Г8
.
Ht7se/.i
. Фцг.8
7i
Фиг. 9
I
7- в,
5 / ъ/Ь
ф«,.{2
ЗГглф
$ $
Ј1 info
ъ,ыш
Ъ
Г
t
Г
и
ъ,
I
$. и
ъ
ф.я
Фиг, W
1 f M
7
ъ
/ г.
ъ
74
$.&
Щ-1 (
Т
0U Ј3
/& , S6
k
Jo
t
frlfrZCa
/
w
//т
/f vV
& ъ
ШШ1
Y 0
-j--..,„
t
15
П
11
Ц)иг 31
12
4Фиг 36
frlfrZea
&
frB
т
(X
со г-
%
Ъ #
«.
Ф. ft
%
Sft
Ф«г,
w
ъ
фиг. 4
to
/
&
.34
А
. 7
А
#г/г. ЛУ
tft
п а
«8
Т / V Ъ
/г.
№гф Ч:
Г eg
«
friweii
У
W. 62
в .§
ш
в
«
-J
СО
ю
л
IN3
8f
Фиг. 69
Фиг. 70
8,,
Фиг 71
fti
Фиг. 72
w
8,
1ф
Л
/0
&
Фиг. ZJ
fis
&г/г. 74
It
U гпср
в
9L
$
/- fr И6L МФ
г
в
08 УФ
L Т
1
&
Я
JL
9
Фиг. 81
i
i
г
7Z 82 5 6 JB t Фиг. 93
11
12
/
21
и
j... N| tvXXN X S
l(,SSSfSSAsSf
7
B 2L r
7I
W 2Г)Ф
В.
ЛЛ
у{ЈУШ{Я ГТ7/ //л
№&&&SSnS3Sg3r F
y JPsN-S.. j,|L J
tor I
Ъ BZ
6
Т
Фиг. 97
r I
6
Фиг. 89
Фиг. 90
I
ь/ V
//
&
fc
12
&
Лг. #
/г
Л
u
a
x/
Si
4
to
&#.&
Oi
Я/2Я
Of
Я/2
Of
Фиг. WO 4J
00
3/2V 2ff
0,
J/2JI
27
0,
Ш ълФ
имей
т
/
V IE
/ TV v-
Фиг. 105
23
V IE
TV v-
Фиг. 105
23
Т
т
r/
9 Фиг. 108
Фиг.ЮВ
1
212
Put.110 ty9 2 , , . //Ј/
. Т it ьу/у/л : l /y// /VЈ- $JP/с ШЕ222Ш252Й ;
.Э /KSNXVHf 3 1-- -
/ I / //s
I2/,М
10 Фиг. 111
U1
U1
Риг.112
Ь
я Јw Л,//
/V
TJ7
2/2
10
,//
/V
L
Риг.№
211
W
Риг. 115
Риг.116
L Т
6 2
3 5Фиъ-Н7 Я
7ft (put. 118
6 22
т
2//
Г
Т
1
JU /
Огггпф
, « с
Т
N
м еи.-2/ф z
/л
ЈZ
tt
Т
Hfsea
МГгЩ
1
1
I I
т
L
10 фие. 122
Г, У/УТЛ
4
Ґ77TY////
1, II
Y/A
Т гп
212 фиа.Ш 5 3 10
If,
А
ГгЖ/ХЯ.
Y/A
21-,
1
фиг. 124
м
г
/о
у. % ()
фчг. 12$
10
%../,
()
&ui ш
1
Ј
Ml- елф
Г
ZZi-епф
Т
frlWCil
ъ
1
L
Т
1 Р«г. 1322
А
Ы
7
фуг /30
фиг. М
22
- h
$
t
re I
Ј
Nj
t
J
Ч
00 Ю
js.
«US- k
k
Фиг, 136
20
М 19- 20
Риг. 137
т
2ff
22
JL
25 11
Фиг, 138
т
CM
n r«o
Ј ty/гпф I1 f
/
уг
г
ZW Лф
V
212
2tt
фиг. №7
яг/з
Фиг. Iff8
Фиг. Щ9
i9
to
10
10
Фцг. 4SO
г
19
, &
23
1
24
2ff
23
3 я фиг. 152
18
22
(р#г. /5/
fiifi/
1
70
фие 153
-1
.
N
I
Hh2t
23
22
11
1
Фиг. 157
Фаг. 159
22
25
гъ
22
11
Риг. WO
1 12
a-Uf i
ffF ffffff an 11 MI
т
$uz.f62
Ј 97
nt-гш
(г
ег
82
Ф«г, /ЈГ
фцг.Ш
22
Р Ш
чCN СО Г«
V,
м
22
Редактор Н.Бобкова
Составитель Г.Майорова Техред М.Моргентал
фмШ
з
фиг. dfZ
Корректор Т.Малец
| Поляризованный электромеханический преобразователь для электрочасов | 1980 |
|
SU995060A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1487133,кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
