Изобретение относится к миниатюрным электрическим машинам для точного приборостроения, в частности к шаговым электродвигателям реактивного типа для часов.
Цель изобретения повышение технологичности изготовления, сборки и повышение ремонтопригодности с повышением стабильности прямоугольных шагов.
На фиг. 1 показан двигатель, часть разреза вдоль плоскости симметрии полюсов магнитопровода; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - второй вариант конструктивного исполнения, разрез Б-Б на фиг. 4; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - разрез Д-Д на фиг. 4; на фиг, 7 - разрез Е-Е на фиг. 4; на фиг. 8 - третий вариант исполнения двигателя; на фиг. 9 - четвертый вариант исполнения двигателя; на фиг. 10-разрез Ж-Ж на фиг. 9; на фиг. 11 - пятый вариант исполнения двигателя; на фиг. 12 - разрез 3-3 на фиг. 11; на фиг. 13 -шестой вариант исполнения двигателя, разрез И-И на фиг. 14; на фиг. 14 - разрез Л-Л на фиг. 13; на фиг. 15 - седьмой вариант исполнения двигателя, разрез М-М на фиг. 16; ка фиг. 16 - то же, вид в плоскости нейтрального сечения магнитов; на фиг. 17 - то же, вид сверху; на фиг. 18 - то же, вид снизу; на фиг. 19 - разрез Н-Н на фиг. 18; на фиг. 20 - модификация варианта на фиг. 15; на фиг. 21 -то же, при снятой части корпуса и вынутом роторе, вид сверху; на фиг. 22 .- разрез П-FI на фиг, 21; на-фиг. 23 - разрез Р-Р на фиг. 22; на фиг. 24 - геометрические соотношения для седьмого варианта исполнения; на фиг. 25 - восьмой вариант исполнения двигателя; на фиг. 26-35 - пояснение принципа действия варианта шагового электродвигателя с клювообразными полюсами ротора; на фиг, 36-43 - пояснение принципа действия варианта шагового электродвигателя с симметричными полюсами ротора при разных магнитах и наконечниках статора; на фиг. 44-49 - пояснение принципа действия варианта шагового электродвигателя с уравновешенной электромагнитной Системой.
Двигатель (фиг. 1 и 2) содержит немагнитный корпус из двух частей 1 и 2. Цилиндрические постоянные магниты 3 и 4 фиксируют зубчатый ротор 5 и пропущены сквозь отверстия 6,7 и 8,9 в частях корпуса. Напротив отверстий 6 и 8 укреплена немагнитная вставка 10, а напротив отверстий 7 и9-такая; же немагнитная вставка 11 (вставки 0 и 11 изготовлены из латуни, алюминия и т.п. для демпфирования колебаний). Между торцами частей корпуса
укреплены полюсные наконечники 12 и 13 П-образного магнитопровода 14, несущего обмотку 15 управления.
Отверстия 6-9 вместе с вставками 10 и
11 служат для того, чтобы можно было установить магниты 3 и 4 между одноименными полюсами 16, 17 и 18, 19 магнитопровода после окончательной сборки и регулировки ротора 5 в корпусе,-удобно и просто при
0 необходимости извлечь магниты без извлечения ротора из корпуса.
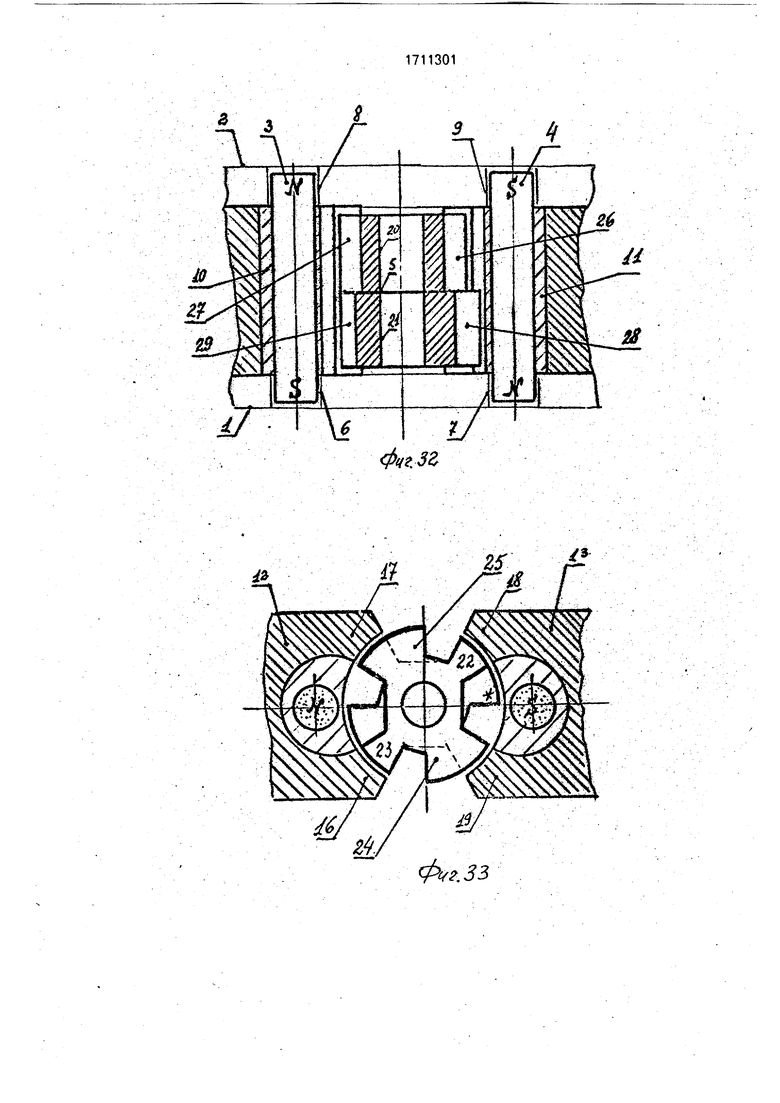
Ротор 5 в первом варианте (фиг. 1 и 2) выполнен из двух идентичных дисковых частей 20 и 21, имеющих по две пары зубцов
5 22, 23 и 24, 25. Одинаковые зубцы в каждой паре, соответственно 22,23 и 24,25 установлены диаметрально по отношению друг к другу. Зубцы разной угловой протяженности: 22 и 24, 23 и 25, чередуются между
0 собой с соотношением угловых протяжен- ностей зубцов 1:2, а пазов 26 и 28, 27 и 29 между зубцами 2:1, также чередующихся между собой. Дисковые части 20 и 21 установлены с разворотом на зубцовое деле5 ние относительно друг друга, образуя практически одинаковые клювообразные полюса ротора при простой технологии изготовления. Угловая протяженность полюсов 16-19 полюсных наконечников 12 и 13
0 магнитопровода равна угловой протяженности меньших зубцов 22 и 23 дисковых частей ротора. Угловая протяженность впадин 30 и 31 между полюсами магнитопровода статора равна угловой протяженности
5 больших Зубцов 24 и 25 дисковых частей ротора.
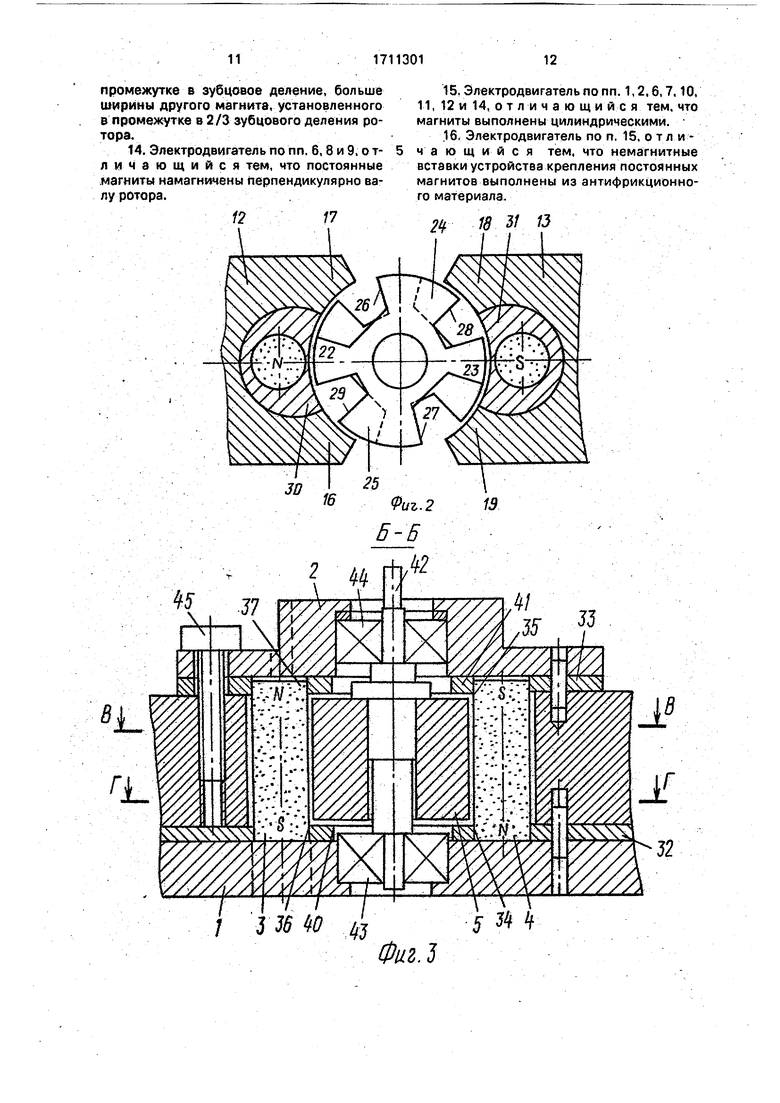
Во втором варианте исполнения двигателя (фиг. 3-7) между торцами частей Т и 2 корпуса и полюсов 16-19 магнитопровода
0 установлены немагнитные пластины 32 и 33 со сквозными отверстиями 34-37, в которых размещены концы постоянных магнитов 3 и 4. Ротор 5 здесь выполнен с двумя аксиально смещенными зубцовыми
5 зонами 38 и 39, первая из которых выполнена с зубцами 24 вдвое большей угловой протяженности, чем угловая протяженность зубцов 22 зоны 3В. Протяженность зубцов 22 зоны 39 - треть зубцового деле0 ния,. а зубцов 24 зоны 38 - две трети зубцового деления. Контуры зубцов 24 нанесены на фиг. 4 пунктиром на зубцовую зону 39 для наглядности. В.отверстиях 40 и 41 пластин 32 и 33 размещен вал 42
5 ротора 5, установленный в опорах 43 и 44. Элементы конструкции двигателя зафиксированы винтами 45 и 46. (Винты 45 и 46 могут заворачиваться как в части 1 и 2 корпуса, так и в наконечники 12 и 13 П-образного магнитопровода 14. На фиг. 3 поясняется
размещение одного из винтов). Для точной ориентации части 2 корпуса и пластины 33 на наконечники 12 и 13 могут служить, например, штифты 47 (один из них попал в разрез на фиг. 7), а для ориентации части 1 корпуса относительно наконечников 12 и 13 служат штифты 48 (в рассматриваемом частном случае достаточно, в принципе, иметь по одному штифту 28 в каждом наконечнике, например правому на фиг. 7).
Для фиксации положения магнитов 3 и 4 в аксиальном направлении могут быть использованы, например, винты-пробки 49 (пунктирное изображение на фиг. 6).
Особенности варианта исполнения по фиг. 3-7 позволяют устанавливать магниты
3и 4 через отверстия в корпусе и отверстия 34-37 в пластинах 32 и 33 после сборки ротора 5 в корпусе и его окончательной регулировки, после чего фиксировать магниты винтами-пробками 49. Положение винтов можно зафиксировать, например, шпаклевкой.
Последовательность сборки характеризуется тем, что до установки ротора 5 с опорами 43 и 44 в частях 1 и 2 корпуса производят операцию установки пластины 32 на часть 1 корпуса, после чего устанавливают в ту же часть корпуса ротор 5 с опорой 43, устанавливают на наконечники 12 и 13 пластину 33, затем устанавливают част,ь 2 корпуса с размещением в ней опоры 44 вала 42 ротора 5.
Особенностью переборки является то, что для ограничения момента фиксации (или его увеличения) путем замены магнитов 3 и
4здесь не требуется извлечение ротора 5, Достаточно отвернуть пробку-винт 49 и извлечь магнит из отверстий 36 и 37 пластин 32 и 33 с использованием отверстий 6 и 7 в частях 1 и 2 корпуса (фиг. 6).
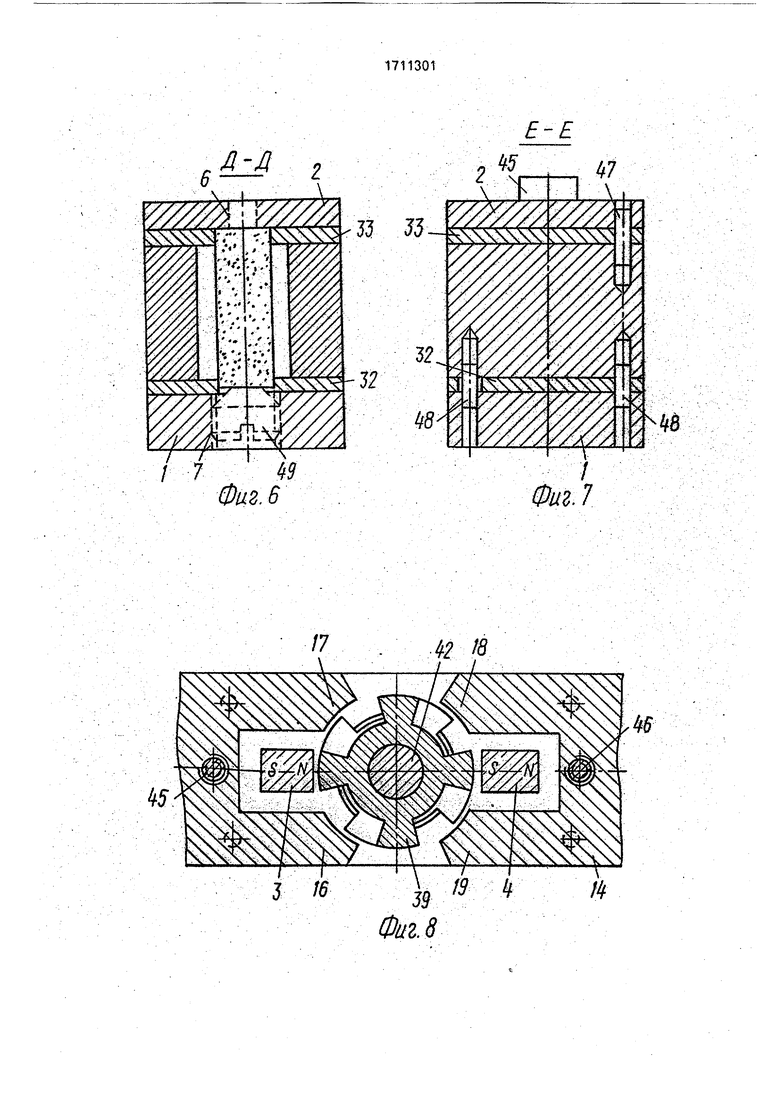
Как это показано на фиг. 8 применитель - но к третьему варианту исполнения двигателя, магниты 3 и 4 могут быть в сечении прямоугольными и намагничены перпенди- кулярно оси вала 42 ротора 5.
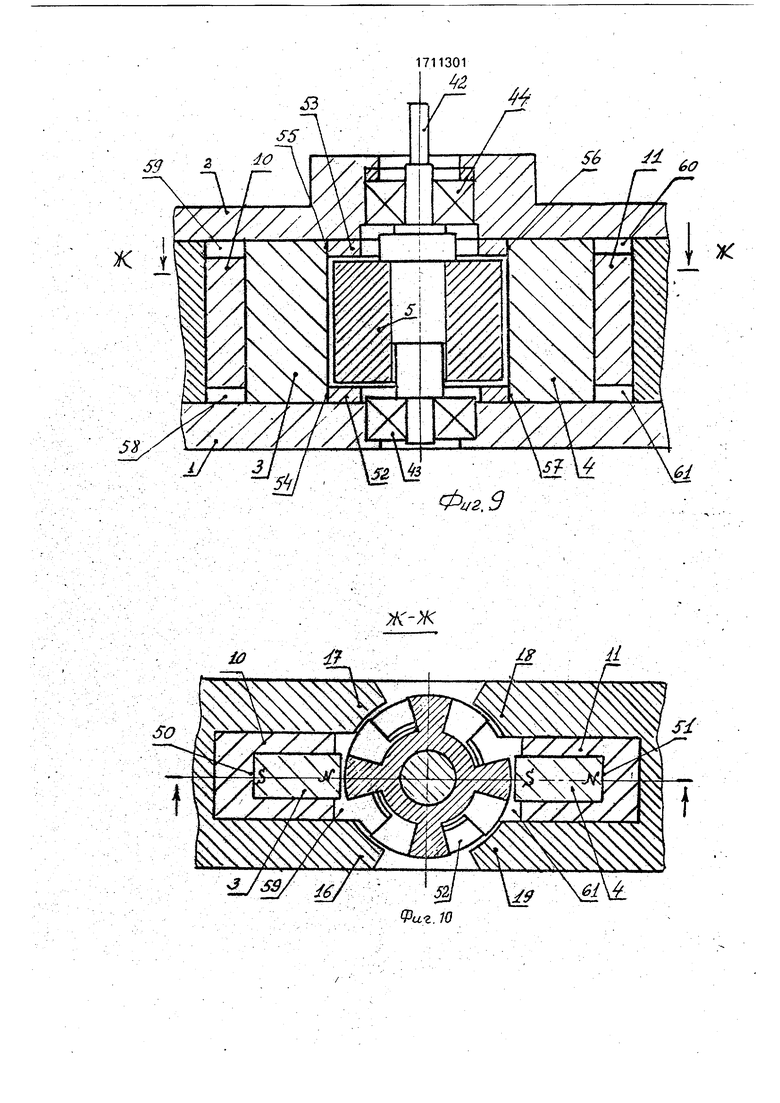
В четвертой варианте исполнения дви- гателя (фиг, 9 и 10} немагнитные вставки 10 и 11 выполнены с открытыми в сторону ротора 5 пазами. 50 и 51 соответственно. При этом вставки Ш и tl закреплены между торцами немагнитных пластик 52 и 53, выполненных с открытыми в противопояфк- ные от: ротора стороны пазами 54-457. Магниты 3 и:4 установлены в пазах 50 и 51 вставок, концы магнитов - в пазах 54-57 пластин 52 и 53, которые прилегают к; тор-: цовым частям Л и 2 корпуса и установлены своими выступами 58-61 в немагнитных промежутках между одноименными полю
сами 16, 17 И 18, 19 на наконечниках 13 и 14 магнитопровода.
В пятом варианте исполнения двигателя (фиг. 11 и 12) устройство крепления по- 5 стоянных магнитов 3 и 4 выполнено в виде немагнитных цилиндрических вставок 10 и 11с вырезами 62 и 63 в пределах от четверти до трети дуги окружности по боковой поверхности, обращенной к ротору и с
0 прямоугольными пазами 50 и 51. Вставки 10 и 11 здесь закреплены между торцами круглых немагнитных пластин 64-67 с отверстиями 34-37. прилегающих к торцовым частям 1 и 2 корпуса. При этом.одна
5 пара пластин 64 и 65 установлена между полюсами 16 и 17, а другая пара пластин, соответственно, 66 и 67 - между полюсами 18 и 19.
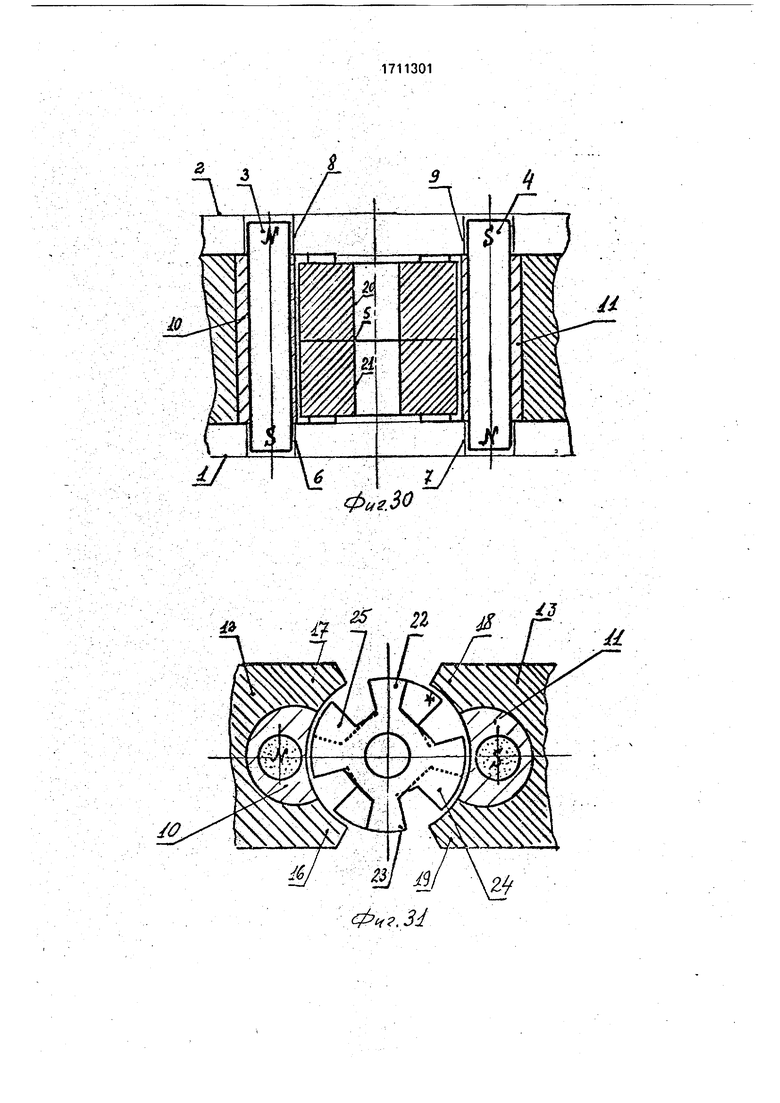
В шестом варианте исполнения двига0 теля (фиг, 13 и 14) все четыре полюса ротора 5 имеют одинаковую угловую протяженность в треть зубцового деления и такую же угловую протяженность имеют полюса 16, 17 и 19 магнитопровода 14 об5 мотки 15 управления. Полюс 18 имеет угловую протяженность в две трети зубцового деления ротора/Промежутки между полюсами 17 и 18 и между полюсами 16 и 19 - треть, а между полюсами 16 и 17 - целое
0 зубцовое деление ротора. Промежуток между полюсами 18 и 19 - две трети зубцового деления ротора. Четырехзубцовый ротор 5 здесь установлен между разными прямоугольными магнитами 3 и 4. Часть корпуса 2
5 зафиксирована винтами 45 и 46, завернутыми в колонки 68 и 69..
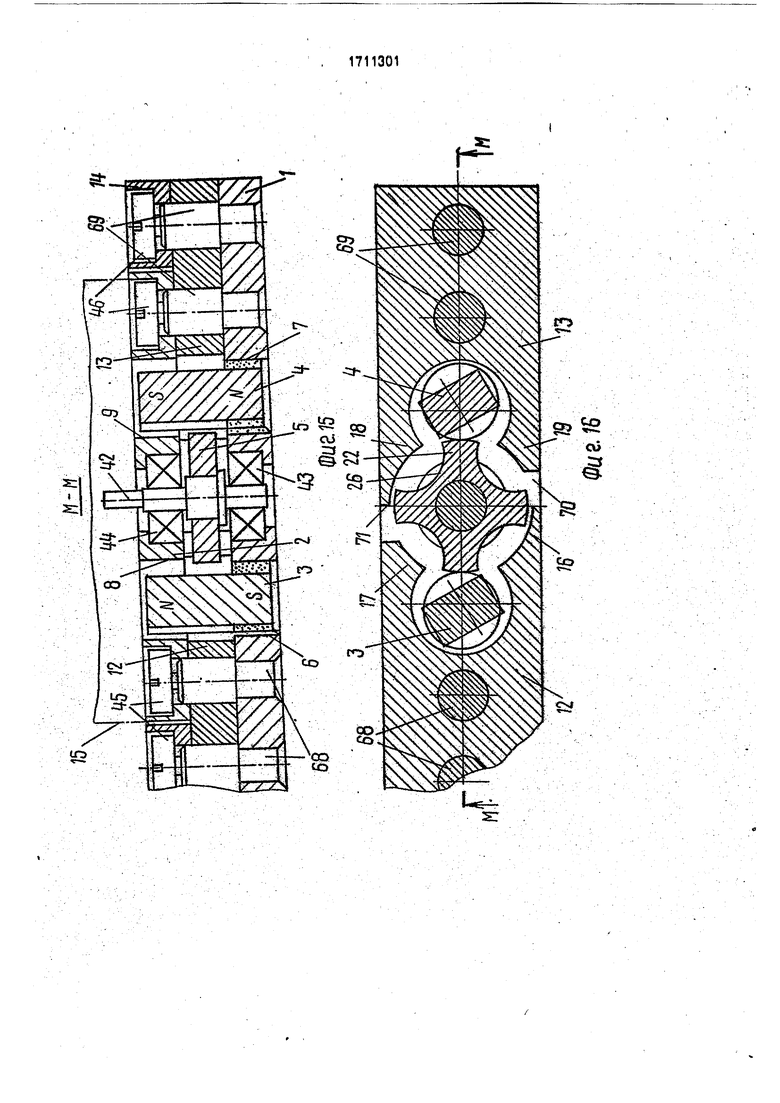
В седьмом варианте исполнения двигателя (фиг. 15-24) один из одноименных полюсов 16 и 18 на каждом из наконечников
0 12 и 13 магнитопровода 14 выполнен с угловой протяженностью вдвое большей, чем угловая протяженность другого полюса (17 и 19). Угловая протяженность промежутков между одноименными полюсами
5 магнитопровода вдвое превышает протяженность промежутков 70 и 71 между разноимёнными полюсами. Ротор 5 и здесь тоже выполнен с одинаковым профилем по всей ддине при одинаковых зубцах 22.
0 вдвое меньших по угловой протяженности, чем промежутки 26 между зубцами. Постоянные магниты 3 и 4 выполнены в виде параллелепипедов с ориентацией продольной оси симметрии поперечного сечения
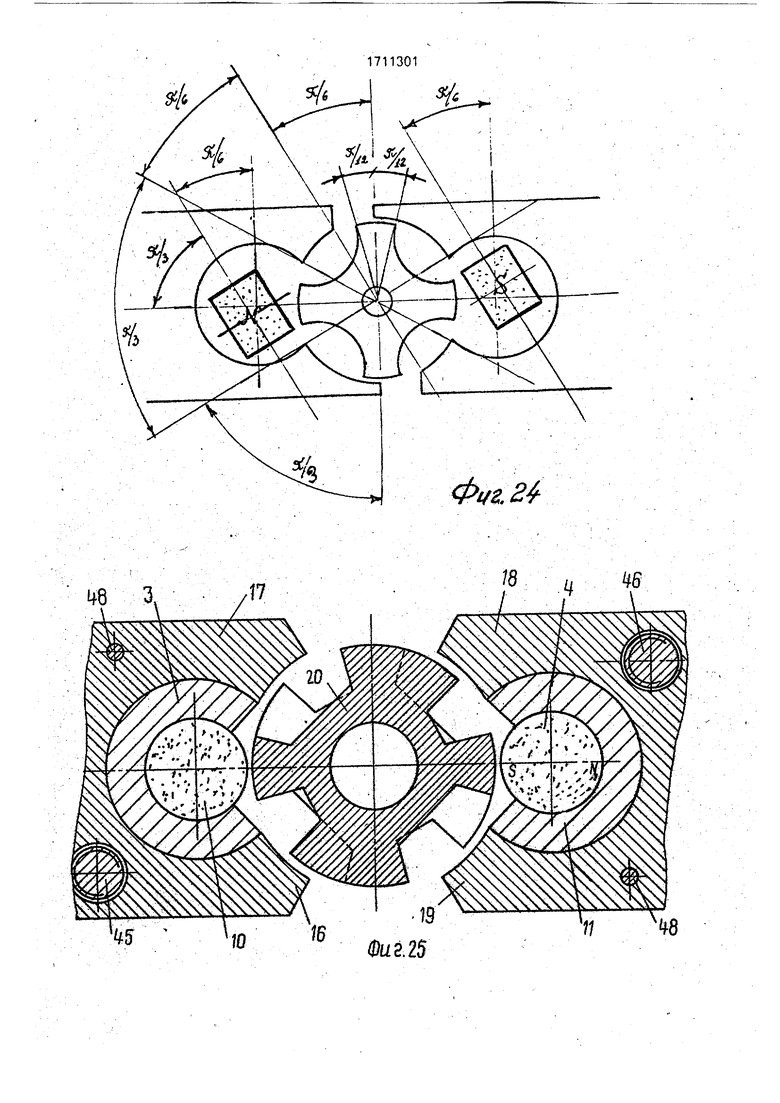
5 каждого магнита под углом я/4 - лг/12 к оси симметрии промежутков между одноименными полюсами магии гопровода, проходящей через ось вращения ротора.
В конструкции согласно фил 15-49 для крепления постоянных магните 3 и 4 использованы отверстия 6 и 7 в части 1 корпуса, в которой установлена опора 43 вала 42 ротора 5. Каждый из магнитов закреплен в одном из отверстий, например, с натягом, на колею и т.д.
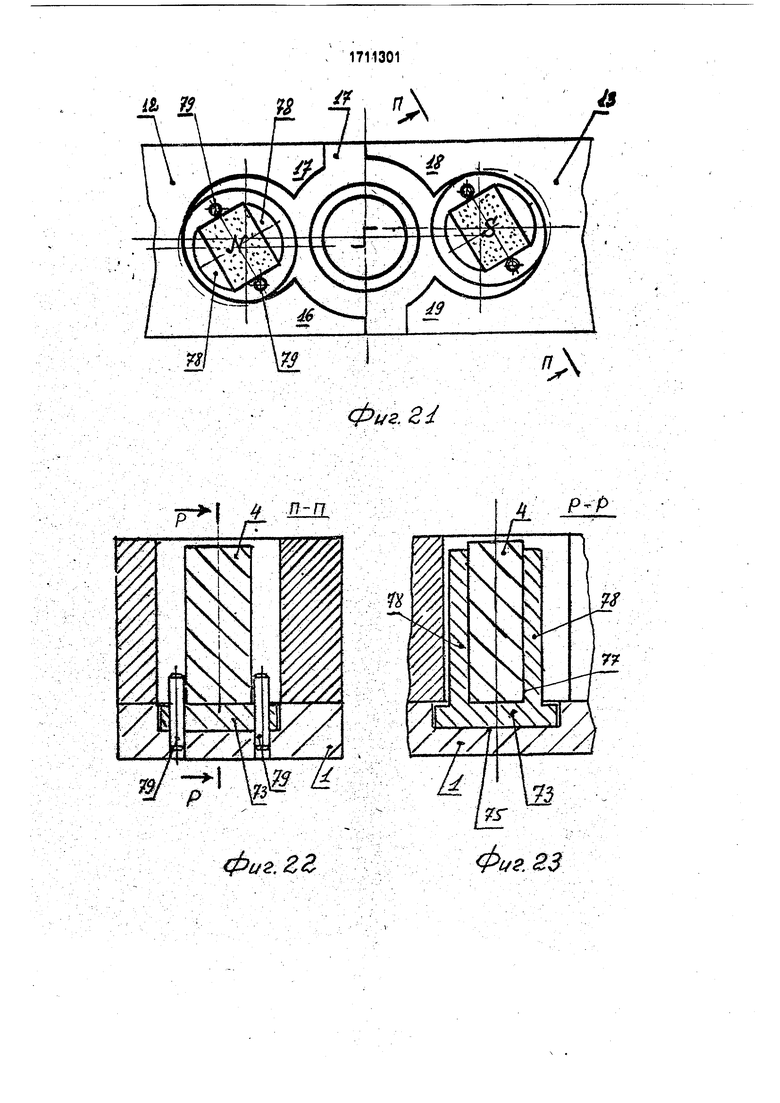
В конструкции согласно фиг. 20-23 устройство крепления постоянных магнитов выполнено в виде немагнитных цилиндрических вставок 72 и 73, закрепленных в кольцевых проточках 74 и 76, выполненных в торцовой части 1 корпуса. Во вставках 72 и 73 со стороны, противоположной креплению в части 1 корпуса, выполнены прямоугольные вырезы 76 и 77 с образованием ребер 78. Магниты 3 и 4 установлены между ребрами 78 и штифтами 79.
В восьмом варианте исполнения двигателя (фиг, 25) при намагничивании используют выступающие за пределы полюсов 16-19 концы цилиндрических магнитов 3 и 4. Концы магнитов выступают за пределы корпуса таким образом, что можно без повреждения обмотки обеспечить создание поля для из диаметрального намагничивания. Особенностью данного технического решения является то, что немагнитные цилиндрические вставки 10 и 11 здесь выполнены из антифрикционного, материала {латунь, пластмасса, бронзо-графит и т.д.).
Магниты 3 и 4 устанавливают во вставки 10 и 11 в ненамагнйченном состоянии с возможностью вращения вокруг оси. При намагничивании магниты поворачиваются под действием собственного поля и фиксируются в положении согласно чертежа. После этого положение магнитов фиксируют любым-известным способом с возможностью последующего освобождения.
Двигатель работает следующим образом.
При невозбужденных полюсах 16-19 зубцы полюса 22-25 дисковых частей 20 и 21 ротора 5 фиксируются магнитами 3 и 4 в положении согласно фиг. 1 и 2, При возбуждении полюсов 16-19 полюсных наконечников 12 и 13 магнитопровода с появление.м тока в обмотке ротор поворачивается по часовой стрелке, если смотреть на фиг. 2, и занимает положения согласно фиг. 26 и 27 (пройдена половина шага). За счет действия фиксирующих магнитов 3 и 4 из положения по фиг. 26 и 27 ротор 5 переходит при снятии электрического сигнала с обмотки в положение по фиг, 28 и 29, затем по фиг. 30 и 31 и в этом новом фиксированном положении завершает шаг. С поступлением следующего импульса тока процесс повторяется (фиг. 32 и 33 - пройдена половина следующего шага; фиг. 34 и 35 - доворот под действием момента фиксации к исходному положению).
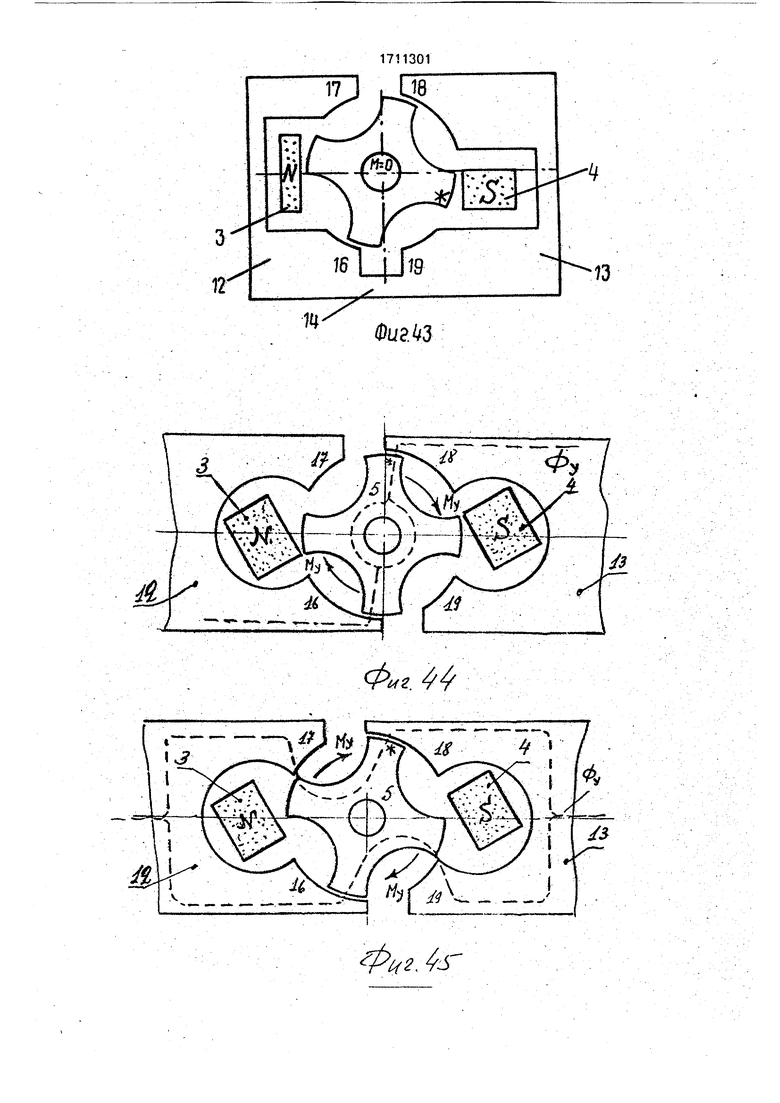
Двигатель с крестообразным ротором и разными магнитами (фиг. 13 и 14} через каждый шаг имеет совпадающие положения симметричного ротора. С поступлением тока в обмотку 15 ротор 5 последовательно поворачивается из исходного положения (фиг. 36) под действием реактивного момента Мо в положение по фиг, 37-39. Доворот из положения по фиг. 39 до нового исходного происходит под действием реактивного момента фиксации (фиг. 40-43).
Существенным преимуществом варианта конструкции согласно фиг. 15-24 является принципиальная симметрия системы, обеспечивающая уравновешенность всех усилий. Действительно, как при движении под действием момента от обмотки управления My (фиг. 44-46), так и под действием момента фиксации магнитов (фиг. 47-49) неуравновешенные магнитные тяжения полностью отсутствуют.
Ф о р м у л а и зо б р е т е ни я
1.Шаговый электродвигатель, содержащий немагнитный корпус из двух частей, между параллельными торцами которых закреплен несущий обмотку управления
П-образный. магнитопровод, имеющий на концах полюса, между которыми в немагнитных промежутках закреплены фиксирующие зубчатый ротор постоянные магниты, отличающий с я тем, что, с целью
повышения технологичности изготовления, сборки и повышения ремонтопригодности с повышением стабильности шагов в 1/4 оборота, каждый наконечник магнитопровода выполнен с Двумя полюсами, ротор выполнен с двумя парами зубцов, магниты установлены между одноименными полюсами магнитопровода и закреплены с помощью устройства из крепленая.
2.Электродвигатель по г. 1, о т л и ч а - ю щи и с я тем. что устройство крепления
постоянных магнитов выполнено в виде немагнитных вставок, выполненных по форме промежутка между одноименными полюсами магнитопровода, закрепленных между.
торцовыми частями немагнитного корпуса и выполненных с отверстиями, в которых закреплены постоянные магниты, а концы магнитов размещены в отверстиях, выполненных в торцовых частях корпуса.
3. Электродвигатель по п. 1, о т л и ч а. - ю щ и и с я тем, что один из одноименных полюсов на каждом конце магнитопровода выполнен с угловой протяженностью вдвое большей, чем угловая протяженность другого полюса, угловая протяженность промежутков между одноименными полюсами мзгнитопроводз вдвое превышает протяженность промежутков между разноименными полюсами, ротор выполнен с одинаковым профилем по всей длине при одинаковых зубцах по угловой протяженности вдвое меньших промежутков между зубцами, постоянные магниты выполнены в виде параллелепипедов с ориентацией продольной оси симметрии поперечного сечения каждого магнита под углом тг/4 ...я/12 к оси симметрии промежутков между одноименными полюсами магнйтопровода, прохрдящей через ось вращения ротора.
4.Электродвигатель по п. 3, о т л и чающийся тем, что устройством крепления постоянных магнитов служат отверстия В той же части корпуса, в которой установлена одна из опор вращения вара ротора, каждый из магнитов одним из концов закреплен в одном из указанных отверстий.
5.Электродвигатель по п. 3, отличающий с я тем, что устройство крепления постоянных магнитов выполнено в виде немагнитных цилиндрических вставок, закрепленных в кольцевых проточках в одной из торцовых частей корпуса, причем в указанных вставках со стороны, противоположной креплению в корпусе, выполнены прямоугольные вырезы для размещения магнитов.
6.Электродвигатель по п. 1, о тли чающийся тем, что устройство крепления- постоянных магнитов выполнено в виде немагнитных пластин, установленных между торцами полюсов магнйтопровода и торцовых частей корпуса и выполненных со сквозными отверстиями, в которых размещены концы постоянных магнитов.
7..Электродвигатель по пп. 5 и 6, о т л и- чающийся тем, что для фиксации постоянных магнитов в аксиальном направлении использованы винты-пробки, закрепленные в отверстиях, выполненных в торцовой части немагнитного корпуса напротив магнитов.
8. Электродвигатель по п. 1, о т л и ч а - ю щи и с я тем, что устройство крепления выполнено в виде немагнитных (вставрк с открытыми в сторону ротора пазами, вставки закреплены между торцами немагнитных пластин с открытыми в противоположные от ротора стороны пазами, магниты установлены в пазах вставок, концы магнитов - в пазах пластин, пластины прилегают к торцовым частям корпуса и установлены своими выступами в немагнитных промежутках между одноименными полюсами на концах магнйтопровода.
9. Электродвигатель по п. 1.отличающий с я тем. что устройство крепления постоянных магнитов выполнено в виде немагнитных цилиндрических вставок с
вырезами в пределах от четверти до трети дуги окружности по боковой поверхности, обращенной к ротору, и с прямоугольными пазами, вставки закреплены между торцами немагнитных пластин с отверстиями,
0 прилегающих к торцовым частям корпуса, причем магниты установлены в вырезах вставок, их концы - в отверстиях пластин, а пластины - между одноименными полюсами на концах магнитопровода. ,
5 10. Электродвигатель по пп. 2. 4 и 9, отличающийся тем, что элементы устройства крепления постоянных магнитов выполнены электропроводными,
1.1. Электродвигатель по пп. 1, 2, 4 и 9,
0 отличающийся тем, что ротор выполнен из двух идентичных дисковых частей, каждая из частей имеет по паре одинаковых зубцов разной угловой протяженности, одинаковые зубцы установлены
5 диаметрально по отношению друг к другу, зубцы разной угловой протяженности чередуются между собой с соотношением угловой протяженности зубцов 1:2, а пазов между, ними 2:1, дисковые части ротора уста0 новлены с разворотом на зубцовое деление одна относительно другой, угловая протяженность полюсов на концах магнитопровода равна угловой протяженности меньших зубцов дисковых частей ротора.
5 12. Электродвигатель по пп. 6-8, отличающийся тем, что ротор выполнен с двумя аксиально смещенными зубцовыми зонами, одна из которых выполнена с зубцами вдвое большей угловой протяженно0 сти, чем угловая протяженность зубцов другой зоны, зубцы обеих зубцовых зон совмещены с одной стороны, немагнитные промежутки между.полюсами магнитопровода равны по угловой протяженности
5 большим зубцам ротора, а полюса магнитопровода равны по угловой протяженности меньшим зубцам ротора.
13. Электродвигатель по п. 6, о т л и ч а- ю щ и и с я тем, что угловая протяженность
0 одного из полюсов с одного из концов магнитопровода равна угловой протяженно,- сти промежутка между обоими его полюсами, равного 2/3 зубцового деления ротора, а угловая протяженность проме5 жутка между полюсами с другого конца магнитопровода равна зубцовому делению ротора при угловой протяженности остальных полюсов статора и зубцов ротора равной 1/3 зубцового деления ротора, причем ширина магнита, установленного в
промежутке в зубцовое деление, больше ширины другого магнита, установленного в промежутке в2/3 зубцового деления ротора.
14. Электродвигатель по пп. 6, 8 и 9. о т- личэющийся тем, что постоянные магниты намагничены перпендикулярно валу ротора.
1217
3D25
16Фиг.2
15, Электродвигатель по пп. 1,2.6,7,10, 11, 12 и 14, от ли ч а ю щи и с я тем. что магниты выполнены цилиндрическими.
.16. Электродвигатель по п. 15, о т л и чающийся тем, что немагнитные вставки устройства крепления постоянных магнитов выполнены из антифрикционного материала.
19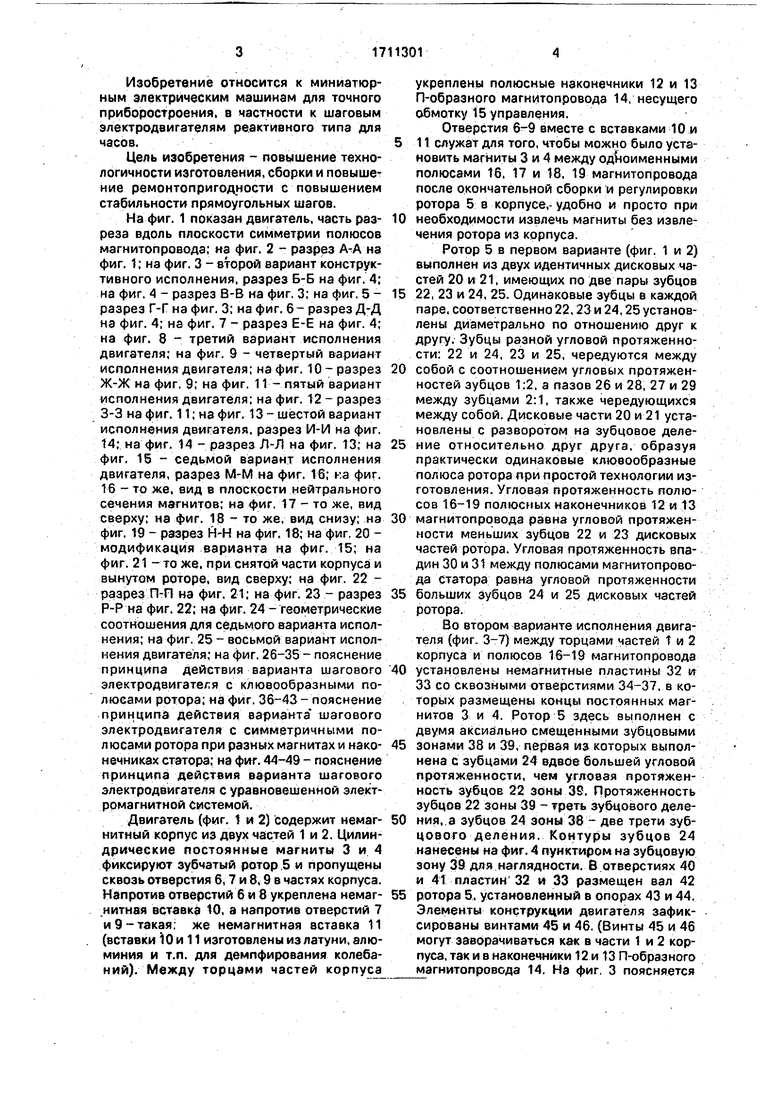


| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый электродвигатель ГНОМ | 1987 |
|
SU1732415A1 |
| Шаговый электродвигатель | 1987 |
|
SU1826109A1 |
| Универсальный шаговый электродвигатель | 1991 |
|
SU1831752A3 |
| РЕАКТИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1987 |
|
RU2020700C1 |
| "Шаговый электродвигатель "Румфон - 2 @ " | 1988 |
|
SU1785066A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| Однофазный шаговый электродвигатель индукторного типа и способ его сборки | 1985 |
|
SU1732414A1 |
| Линейный вентильный электродвигатель | 2020 |
|
RU2750646C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2031523C1 |
| Дискретный электропривод с однофазными шаговыми двигателями | 1988 |
|
SU1837375A1 |












Изобретение относится к электротехнике, преимущественно к миниатюрным электрическим машинам для точного приборостроения, в частности для часов. Цель состоит в повышении технологичности изготовления, сборки и повышении ремонтопригодности. Устройство содержит чнемаг- нитный корпус 1, в котором установлен статор, выполненный в виде П-образного магнитопровода с обмоткой -управления и. 8 Ч полюсными наконечниками 3, каждый из которых выполнен с двумя полюсами, между которыми установлены постоянные магниты 6 и 7, закрепленные с помощью устройства фиксации, выполненного, например, в виде немагнитных вставок 8, выполняемых по форме промежутка между полюсами полюсного наконечника 3 магнитопровода, за- ,крепленных между Торцовыми частями корпуса 1 и выполненных с отверстием 9, в которых закреплены постоянные магниты б и 7, Напротив магнитов 6 и 7 в торцовых частях корпуса 1 выполнены отверстия 11, которые вместе с вставками 8 служат для того, чтобы можно было установить магниты 6 и 7 после окончательной сборки и регулировки ротора 10 в корпусе и удобно и просто при необходимости извлечь их без извлечения ротора. 15 з.п.ф-лы, 49 ил. w Ј 20 / s СО о 21 / 7 / Фиг. 1
о
/ -3 Я № Ј
Л
Фиг.Ий. ,№: И
45 f. L #
лГ Т
/
// ;
W .-:..:JW: 16
8-8
22 39
W -Я
Й/г.4
#.
f. /J
о со
: v ,.,.,« «
...-.vT
2Р
CSj
- Jftv.
со
€
к
.53
Я A &
м
60
К
ж-ж
Фиг. 10
a j
ШгП
U7
/7 /
W:™
Фиг.13
32
:Ш,/4.
to
Фиг.17
Ш.П
ГО
о п
|
3:1
CN
NJ
на
1
шШ
Фиг.гг,
i&iib&d
P-P
$
1711301
5Й
Ф&.24
Фиг.25
11
ОД
&
Ф&г&$ «. 29
Ф.ЗО
&
#21
Фч, 3d
&
ф&-ЗЪ
фгг.ЗЗ
-#
К2Пф -ttv. 0
&ш
LOCUil
fit
CJ
CJ
Фи.М
.Ф«г. 44
Ф«2&
Nh
ХГ
i (
Д
К XN
i
Редактор Н. Яцола
Техред М.Моргентал
Заказ 347ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва. Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
.№
Корректор Т. Палий
| Шаговый электродвигатель | 1984 |
|
SU1538208A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
