Изобретение относится к приборам точной механики, в частности к поляризованным электромеханическим преобразователям для электрочасов.
Целью изобретения является повышение точности отработки шага при одновременном упрощении конструкции и уменьшении аксиального размера.
Предлагаемый преобразователь более технологичен в изготовлении. Из-за меньшего числа составных частей магнитопровода появляется возможность обеспечения более высокой точности выполнения магнитной системы. Сравнительно просто обеспечивается равномерный зазор мезвду полюсам статора с разноименной полярностью, что положительно сказывается на по вьшении стабильности поляризующего магнитного потока от постоянного магнита и, в конечном счете, способствует повьшению точности отработки шага и увеличению использования активной зубцовой зоны ротора, вследствие чего появляется возможность увеличить вращающий момент. Уменьшение числа деталей магнитной системы упрощает конструкцию и способствует повьш1ению надежности преобразовател На фиг. 1 показан преобразовател
в разрезе; на фиг на фиг. 1; на фиг.
1; на фиг.
1
на фиг. на фиг. на фиг. на фиг,
на фиг. 1; на биг.
2- разрез Л-А
3- разрез Б-Б
4- разрез В-В
5- разрез Г-Г
6- разрез Д-Д
7 - модификаци
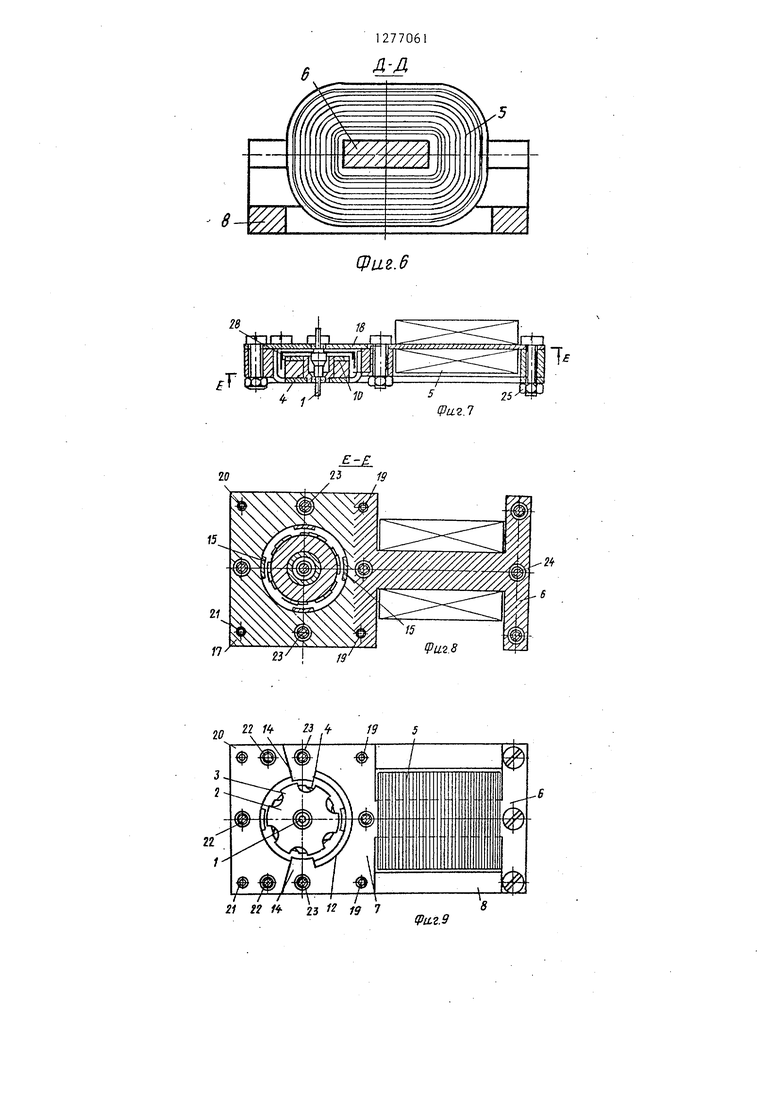
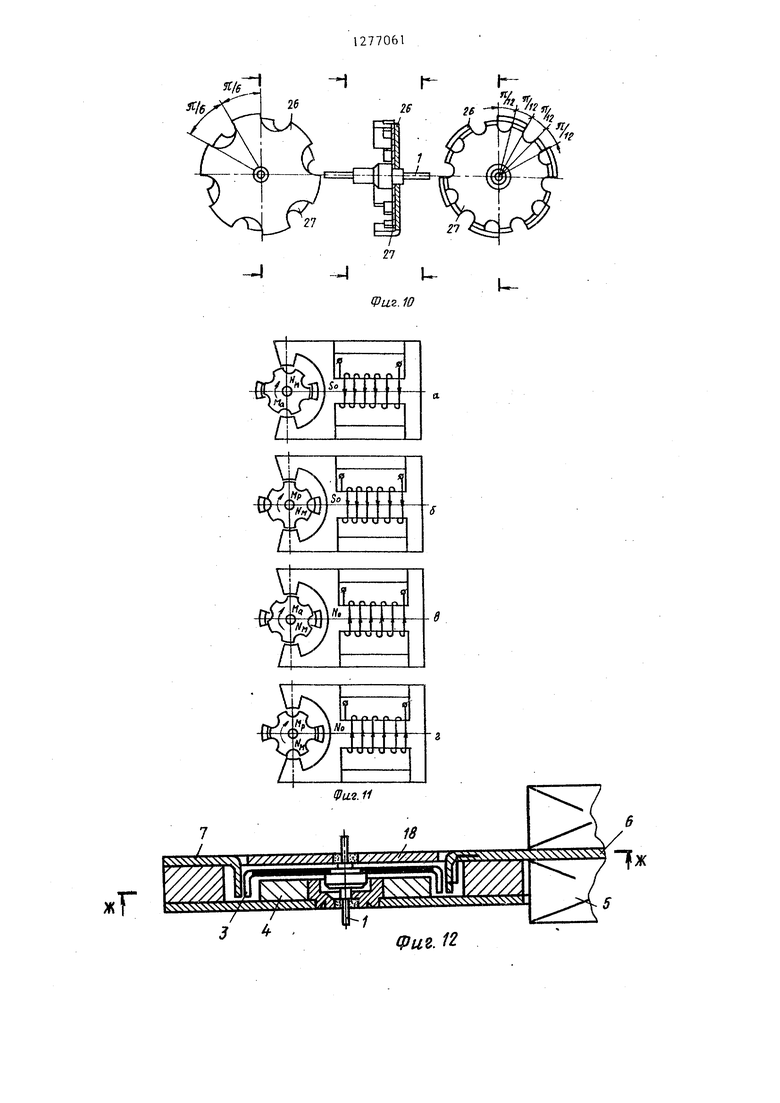
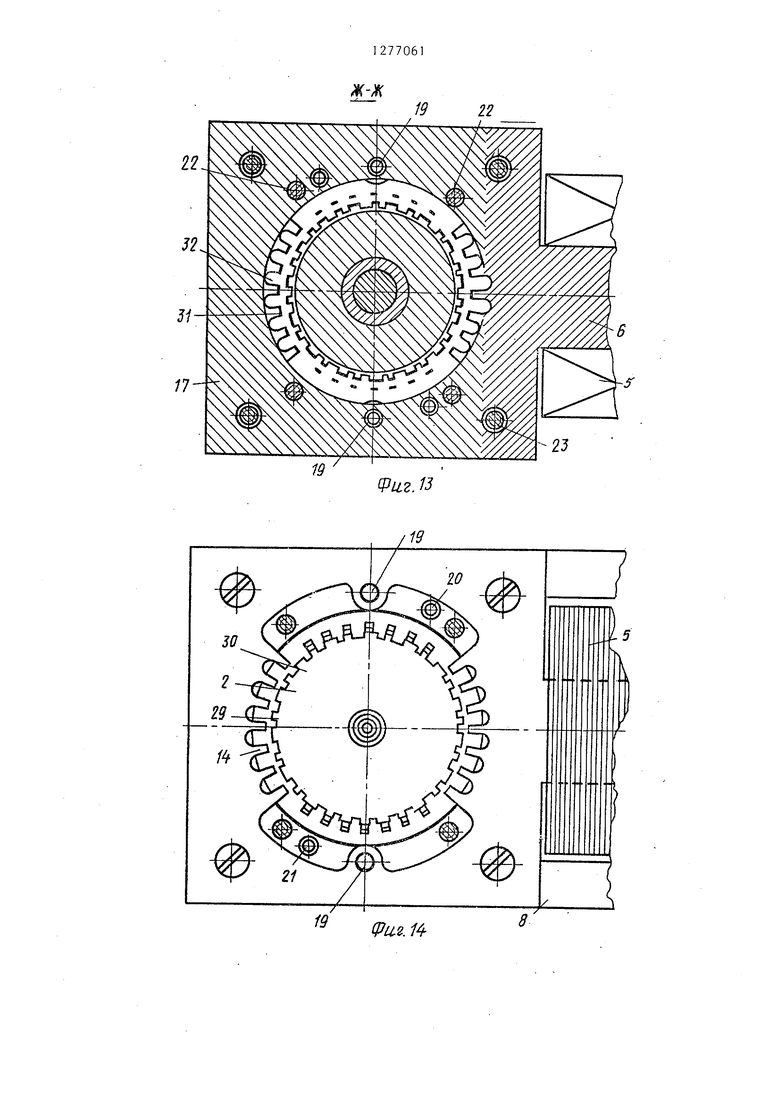
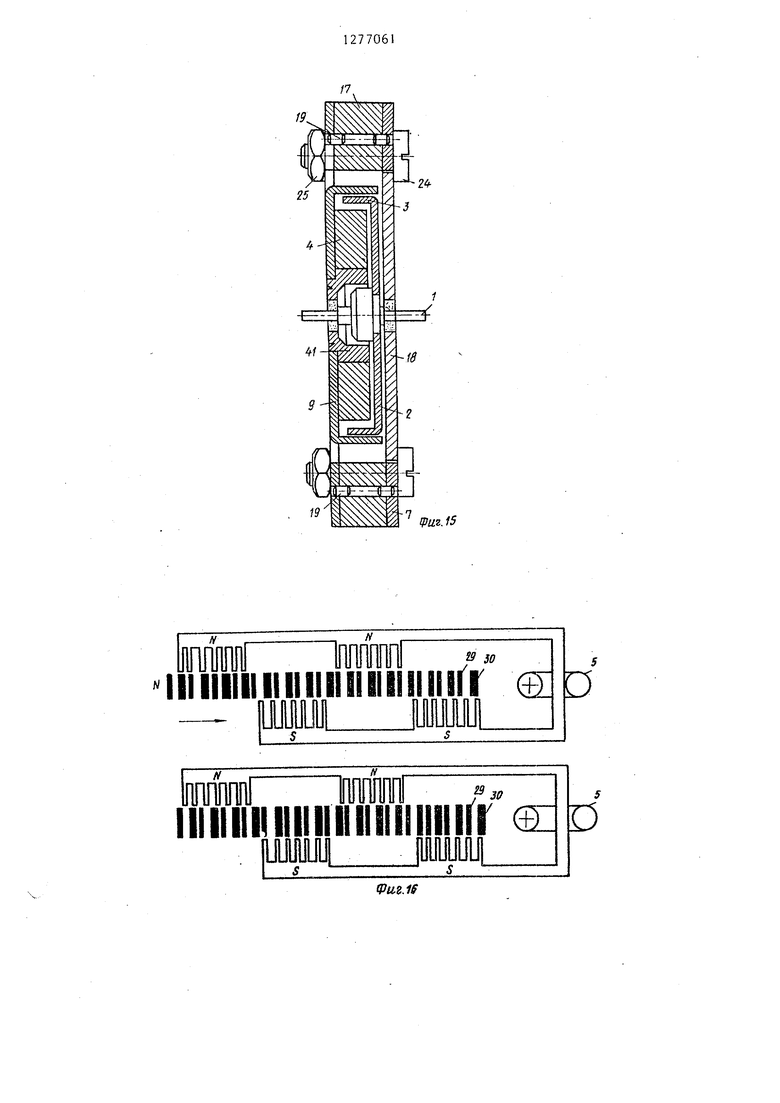
2; на фиг. преобразователя в разрезе; на фиг.8 разрез Е-Е на фиг. 7; на фиг, 9 - то же (вид устройства со стороны торца ротора, крьш1ка корпуса опущена для наглядности изображения элементов магнитной системы); на фиг. 10 - ротор с валом; на фиг. 11 принцип действия устройства с шагом ТГ/6; на фиг. 12 - вторая модификаци преобразователя в разрезе; на фиг. 13 - разрез Ж-Ж на фиг. 12; на фиг. 14 - вид со стороны торца ротора (крьш1ка корпуса не показана); на фиг.. 15 - разрез в плоскости, перпендикулярной разрезу Ж-Ж и проходящей через ось вращения ротора; на фиг. 16 - принцип действия преобразователя по фиг. 12-15; на фиг. 17 модификация устройства; на фиг. 8- модиф 1кация преобразователя с по- вьппенной мощностью на единицу объема; на фиг. 19 - преобразователь в
5
0
5
0
5
0
5
50
55
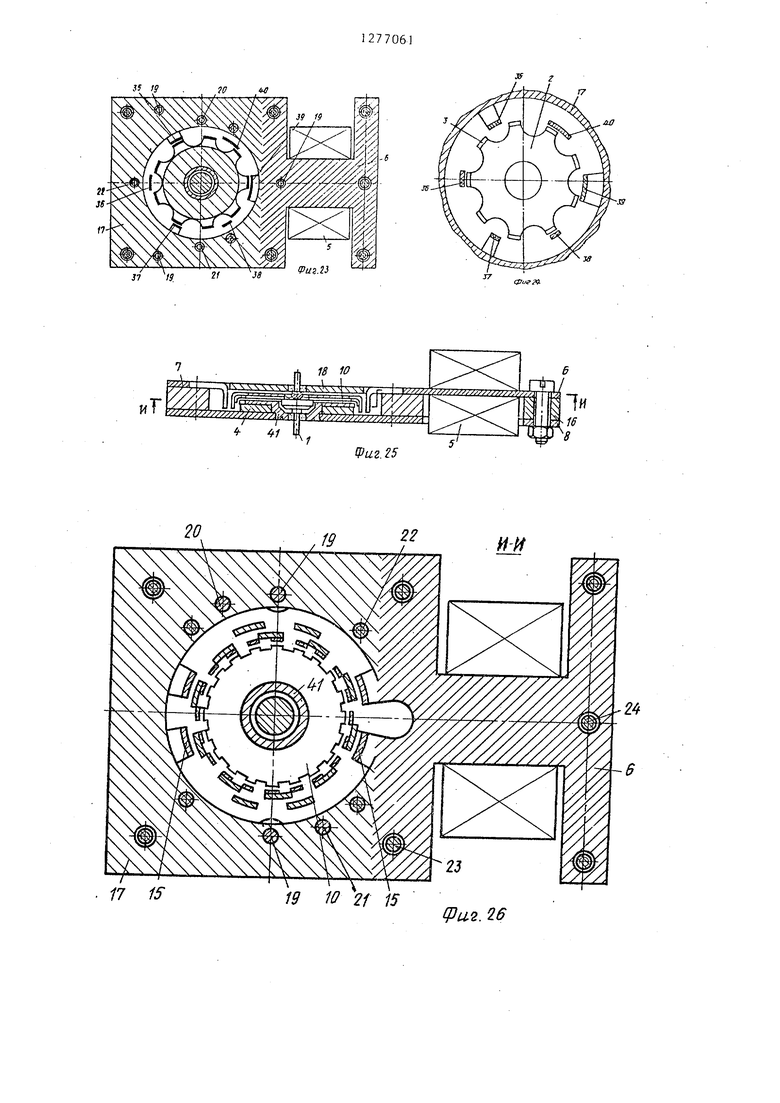
вьшолнении с шагом 21, разрез; на фиг. 20 - разрез 3-3 на фиг. 19; на фиг. 21 - вид устройства по фиг. 19 со стороны торца ротора; на фиг. 22- принцип действия устройства по фиг. 19-21; на фиг. 23 - модификация устройства с шагом Т1/9; на фиг . 24- второе фиксированное положение ротора для устройства по фиг. 23; на фиг. 25 - модификация устройства с шагом 1Г/10, в разрезе; на фиг. 26 - разрез И-И на фиг. 25; на фиг. 27 - вид устройства по фиг. 25 и 26 со стороны торца ротора (крышка корпуса не показана).
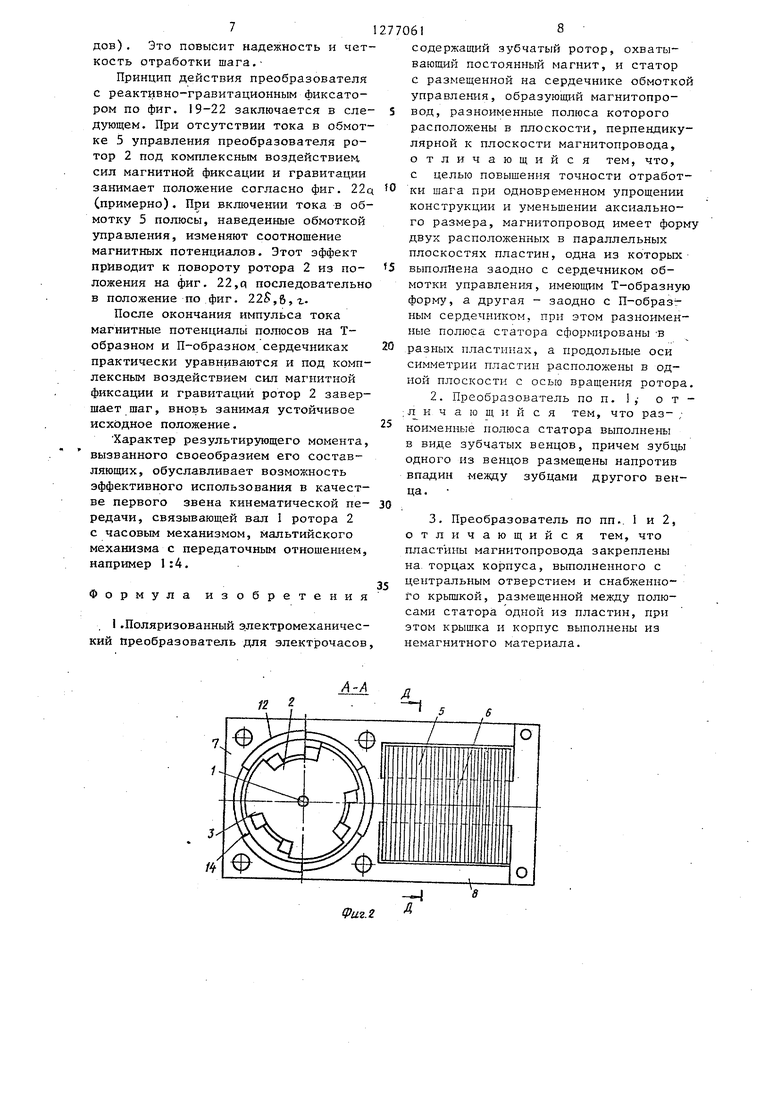
На оси 1 поляризованного электромеханического преобразователя жестко закреплен явнополюсный ротор 2 с зубцами 3 в виде лопастей, отогнутых от его дисковой части и охватьюающих расположенный соосно с ротором 2 постоянный магнит 4, намагниченный в осевом направлении. Обмотка управления выполнена в виде секции 5, расположенной на Т-образном ферромагнитном сердечнике 6 с полюсными баш- маками 7, которые являются частями магнитопровода статора, имеющего форму двух расположенных в параллельных плоскостях пластин, одна из которых выполнена заодно с Т-образным сердечником 6, а другая с П-образным сердечником 8 с полюсными башмаками 9. Соосно с ротором 2 установлена профилированная пластина 10 из ферромагнитного материала, выполняющая роль фиксатора ротора 2 в паузах между импульсами тока, и кольцевой магнитопровод 11. В полюсных башмаках (пластинах магнитопровода) 7 и 9 выполнены радиальные пазы 12 и 13 с образованием разноименных полюсов 14 и 15 статора, лежащих в плоскости, перпендикулярной плоскости магнитопровода статора. Продольные оси симметрии пластин 7 и 9 магнитопровода расположены в одной плоскости с осью вращения ротора 2.
Разноименные полюсы 14 и 15 статора вьшолнены в виде зубчатых венцов. При этом зубцы одного из венцов (например 14) размещены напротив впадин между зубцами другого венца (в данном случае - пазов 13). Т-образный и П-образньм сердечники замкнуты между собой перемычкой 16.
В модификации электромеханического преобразователя согласно фиг.73
11 пазы в пластинах 7 и 9 магнито- провода образуют пары диаметрально расположенных полюсов 14 и 15, при этом пластины установлены на противоположных торцах квадратного корпуса 1 7 с центральным отверстием, снаб женного крышкой 18, расположенной между полюсами пластины 7. Крьппка , 18 и корпус 17 выполнены из немагнитного материала. Полюсы 14 и 15 в области активной поверхности имеют идентичные размеры и конфигурацию. Для взаимной ориентации пластин 7 и 9 и крьшки 18 могут быть использованы штифты 19-21, установленные в корпусе 17.
Для крепления к корпусу крышки 18 могут быть использованы винты 22, а для крепления пластин 7 и 9 магии- топровода - винты 23 и 24 и гайки 25
Ротор 2 (фиг. ,10) выполнен из двух сооснык зубчатых чашек 26 и 27. Верхняя (внешняя) чашка 26 имеет шесть зубцов с угловой протяженностью 7Г/6, а внутренняя чашка 27 может иметь, например, двенадцать зубцов с угловой протяженностью IT/12. Угловая протяженность пазов 28 фиксатора 10 одинакова с угловой протяженностью зубцов у чашки ротора 27, т.е. ТТ/12, а количество этих пазов может быть различным, в зависимости от конкретных требований эксплуатации. При числе пазов 12 - наиболее жесткая фиксация, что может приводить и к повьшению вращающего момента. При минимальном числе пазов 28, например, два, уменьшается порог срабатывания, т.е. устройство, в принципе, способно функционировать при минимальном уровне, сигнала, однако перегрузочная способность при этом падает. В общем случае выбор числа фиксирудащих пазов - задача, решаемая при оптимальном проектиро- вании для конкретных условий. Преобразователь в варианте согласно (фиг. 13-16) может иметь дополнительно уменьшенный аксиальный размер при малой величине шага ,(1Г/30) . Особенностью его являются зубцы разной угловой протяженности на роторе 2. Например, на фиг. 13 и 14 зубцы 29 ротора 2 имеют угловую протяженность 2ТГ/90, а зубцы 30 - угловую протя- женность 211/45. Края зубцов 29 и 30 установлены с одной стороны равномер но по окружности. При общем числе
770614
зубцов ротора 2 межзубцовые промежутки между ними также соответственно разные: 2(Г/45 и 2ТГ/90 в чередующейся последовательности. По- 5 люсы 14 и 15 статора при этом имеют зубцы 31 с угловой протяженностью 2ТГ/90, разделенные промежутками 32 с угловой протяженностью 2Т1/45.
В варианте устройства по фиг. 12- 0 15 возможно выполнение ротора 2 с
зубцами в виде чередующейся последовательности с протяженностью 21Г/90; 2F/60, 27Г/45. В последнем случае предпочтительно выполнить по шесть 5 зубцов 31 на каждом из полюсов статора 14 и 15.
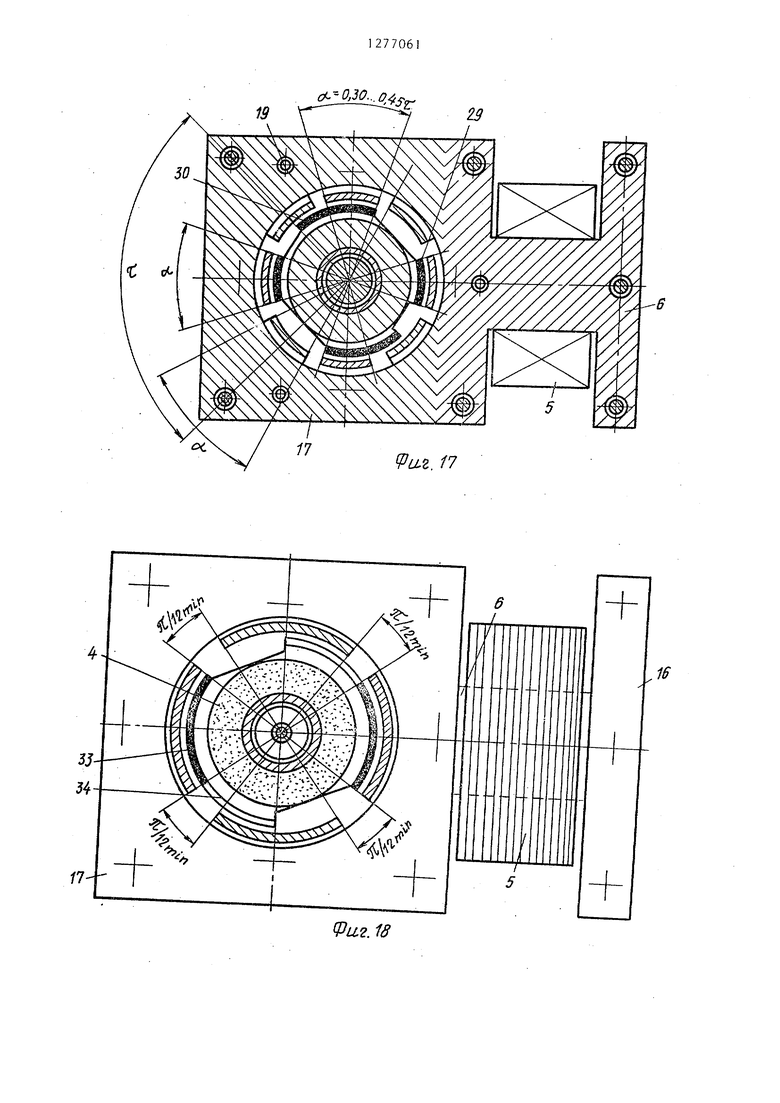
Если малый шаг не требуется (например при шаге ТГ/4), можно повысить использование активного объема 20 путем выбора более благоприятных угловых соотношений магнитной системы в пределах, предусмотренных фиг. 17 (для полюсов 14 и 15 и зубцов.29 и 30 ротора),
25 Модификация устройства согласно фиг. 18 (с шагом 7Т/2) позволяет дополнительно увеличить мощность, приходящуюся на единицу объема преобразователя; По сравнению с друп ми 0 примерами исполнения здесь меньше всего магнитное рассеивание поляризующего потока при относительно : большом шаге и уравновешенной в диаметральном направлении магнитной системе. Оба зубца 33 ротора 2 имеют уступы 34 в пределах от 1/5 до 2/3 аксиального размера.
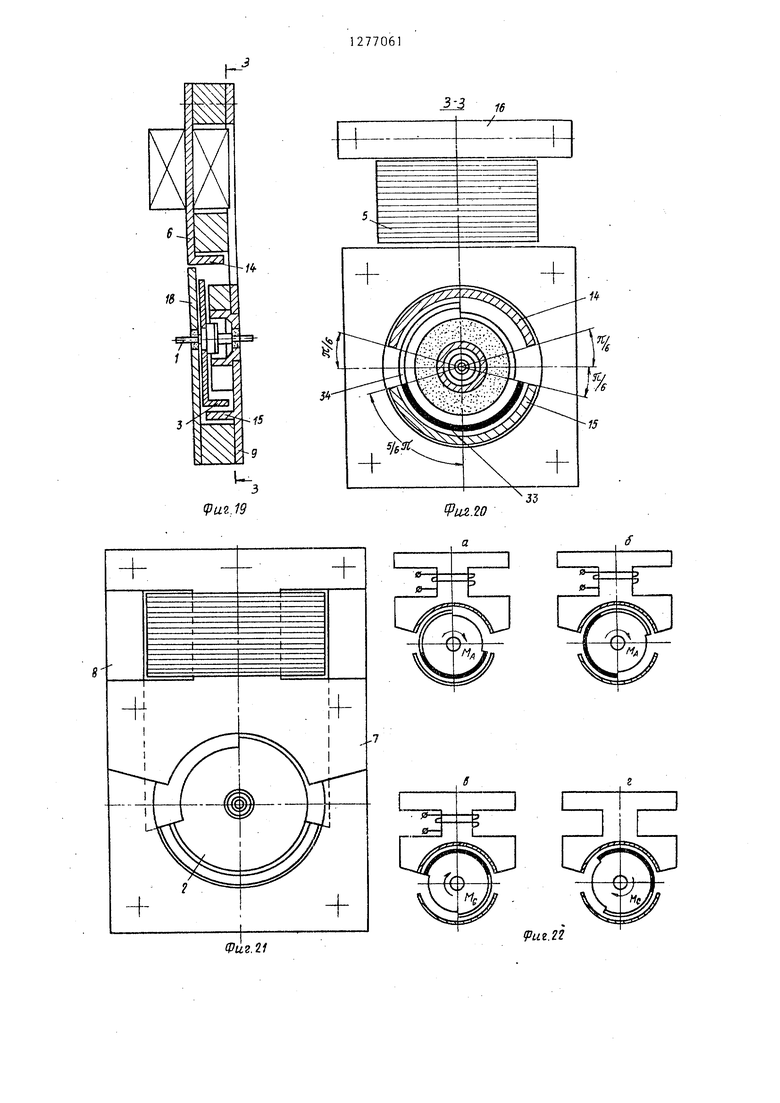
По конструктивно-технологическим соображениям применительно к ис- 0 пользованию в стационарных приборах наиболее целесообразна модификация устройства (фиг. 19-22) с шагом в полный оборот выходного ваша.
Для обеспечения четкой фиксации 5 , ротора в исходных положениях на каждой из двух пластин, магнитопровода преобразователя (фиг. 23) помимо полюсов, имеющих угловую протяженность, равную зубцам 35 и 36 ротора, 0 выполнены полюса с угловой протяженностью меньшей,чем зубцы 37 и 38 ротора, и большей, чем зубцы39 и40 ротора. Целесообразно, чтобы при этом отношение протяженностей в трех группах 5 зубцов статора к протяженности зубцов ротора Л было
)
при величине oL в пределах от 1/3 до 2/5 зубцойого деления ротора.
Во всех модификациях преобразователя постоянный магнит 4 закреплен любым известным способом, например, на немагнитной втулке 41.
Поляризованный электромеханический преобразователь согласно фиг.1-6 работает следующим образом.
При подаче импульса тока в обмотку 5 управления создается магнитное поле, силовые линии которого замыкаются через сердечники 6 и 8, пластины (полюсные башмаки) 7 и. 9, полюсы 14 и 15, зазоры между последними и зубцами 3 ротора, и зубцы 3 ротора 2.
В зависимости от полярности тока в зазоре между полюсами 14 магнито- провода статора и зубцами 3 ротора происходит сложение магнитных потоков обмотки 5 и постоянного магнита 4, в то время как в воздушном зазоре между полюсами 15 статора и зуб- цами 3 ротора происходит вычитание магнитных потоков обмотки 5 и пос- тоянног о магнита 4. В результате зтого возникает вращающий момент, поворачивающий ротор 2 в сторону наибольшей проводимости.
По окончании ийпульса тока ротор 2, вращаясь под действием реактивного момента, обусловленного наличием фиксатора 10, переходит в еле- дующее устойчивое положение. Далее цикл возобновляется.
Работа аналогичного по принципу .действия преобразователя по фиг. 7- 10 поясняется на фиг. 11. При пода- че импульса тока в обмотку управления (фиг. По) зубцы ротора, под- магниченные со стороны магнита 4,
например с полярностью N,, отталкиваются от полюсов магнитопровода с полярностью NO (наведенньп 1и МДС обмотки управления) и притягиваются к полюсам магнитопровода S, в результате чего возникает активный момент Мд, стремящийся повернуть рото в положение согласно фиг. 11,5, где полюсы (зубцы) ротора с полярностью N располагаются напротив полюсов статора с полярностью S,, а полюсы статора с полярностью N - наоборот располагаются напротив промежутков методу зубцами ротора. В положении согласно фиг. 1 1.6 активный момент
авен нулю, однако на ротор дейстует реактивньм момент фиксации Мр, од действием которого ротор продолает движение в том же направлении переходит в устойчивое положение о фиг. 11 & при окончании импульса тока в обмотке управления. Со сменой полярности импульса в обмотке управения процесс повторяется в указанной последовательности (фиг. 11,Ь и ), поскольку теперь полярность поюсов на статоре, возбуждаемых обмоткой управления, меняется на обратную.
С увеличением уровня фиксации при включении тока поворот ротора полу чается больше, чем на 3/4 шага, под действием результирующего момента М, который складывается из активного момента М и реактивного момента фиксации Мр. Если же уровень момента фиксации относительно невелик, то при включении тока поворот занимает практически 3/4 шага, а доворот - около 1/4. В большинстве же случаев для обеспечения надежной работы преобразователя момент фиксации целесообразно выбрать в пределах от 1/3 до 2/3 активного момента и, по крайней мере, в два-три раза больше момента нагрузки.
В варианте по фиг. 13-16 при отсутствии тока в обмотке управления ротор 2 занимает фиксированное угловое положение (фиг. 16 вверху). За счет того, что зубцы 3 ротора с угловой протяженностью 2ТТ/90 ориентируются напротив зубцов одного из сердечников с такой же угловой протяженностью.
При подаче импульса тока в обмотку управления соответствующей полярности (фиг. 16) зубцы ротора переходят в положение, соответствующее показанному на фиг. 16 внизу, поскольку одноименные полюсы на роторе и статоре отталкиваются, а разноименные притягиваются.
В случае выполнения ротора в варианте с чередованием трех размеров
(вместо варианта по фиг. ,13-16) следует число зубцов на магнитопро- воде выбрать с учетом одцовременного взаимодействия одинакового числа зубцов статора и ротора (по два одинаковой угловой протяженности с каждой стороны у каждого из магнитопрово-fO
t5
ов). Это повысит надежность и четость отработки шага.Принцип действия преобразователя с реактивно-гравитационным фиксатором по фиг. 19-22 заключается в следующем. При отсутствии тока в обмотке 5 управления преобразователя ротор 2 под комплексным воздействиен сил магнитной фиксации и гравитации занимает положение согласно фиг. 22а (примерно). При включении тока в обмотку 5 полюсы, наведенные обмоткой управления, изменяют соотношение магнитных потенциалов. Этот эффект приводит к повороту ротора 2 из положения на фиг. 22,0 последовательно в положение по фиг. 22,6,г.
После окончания импульса тока магнитные потенциалы полюсов на Т- образном и П-образном сердечниках практически уравниваются и под комплексным воздействием сил магнитной фиксации и гравитаций ротор 2 завершает шаг, вновь занимая устойчивое исходное положение.
Характер результирующего момента, вызванного своеобразием его составляющих, обуславливает возможность зффективного использования в качестве первого звена кинематической пе- 30 редачи, связывающей вал 1 ротора 2 с часовым механизмом, мальтийского механизма с передаточным отношеш ем, например 1:4.
25
Формула изобретения
I .Поляризованный электромеханический преобразователь для электрочасов.
O
5
0
5
5
содержащий зубчатый ротор, охватывающий постоянный магнит, и статор с размещенной на сердечнике обмоткой управления, образующий магнитопро- вод, разноименные полюса которого расположены в плоскости, перпендикулярной к плоскости магнитопровода, отличающийся тем, что, с целью повышения точности отработки шага при одновременном упрощении конструкции и уменьшении аксиального размера, магнитопровод имеет форму двух расположенных в параллельных плоскостях пластин, одна из которых выполнена заодно с сердечником обмотки управления, имеющим Т-образную форму, а другая - заодно с П-образ- ным сердечником, при этом разноименные полюса статора сформированы -в разных пластинах, а продольные оси симметрии пластин расположены в одной плоскости с осью враще1 ш ротора.
2.Преобразователь по п. 1 у отличающийся тем, что раз- ; ноименные полюса статора выполнены
в виде зубчатых венцов, причем зубцы одного из венцов размещены напротив впадин между зубцами другого венца,
3.Преобразователь по пп.. I и 2, отличающийся тем, что пласт ины магнитопровода закреплены на торцах корпуса, выполненного с центральным отверстием и снабженного крьппкой, размещенной между полюсами статора одной из пластин, при этом крышка и корпус выполнены из немагнитного материала.
А /
9иг.г
иг.5
сриг.б
| название | год | авторы | номер документа |
|---|---|---|---|
| Однофазный шаговый электродвигатель индукторного типа и способ его сборки | 1985 |
|
SU1732414A1 |
| Однофазный шаговый двигатель ИР-360 | 1985 |
|
SU1718344A1 |
| Электромеханический преобразователь для часов | 1987 |
|
SU1812547A1 |
| Шаговый электродвигатель | 1989 |
|
SU1737654A1 |
| Электромеханический преобразователь для часов | 1984 |
|
SU1267350A1 |
| Шаговый электродвигатель | 1984 |
|
SU1377978A2 |
| Шаговый электродвигатель | 1986 |
|
SU1817204A1 |
| Вторичные электрические часы | 1988 |
|
SU1791793A1 |
| ГАРМОНИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1988 |
|
RU2022440C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |


Изобретение относится к приборам .точной механики и позволяет повысить точность отработки шага при одновременном упрощении конструкции и уменьшении аксиального размера. Магнитопровод-статор выполнен из расположенных в параллельных плоскостях пластины 7, выполненной заодно с Т-образным сердечником 6 обмотки 5 управления, и пластины 9, выполненной заодно с П-образным сердечником 8. При подаче импульса тока в обмотку 5 силовые линии магнитного поля замыкаются через сердечники 6 и 8, плас тины 7, 9 и сформированны в них полюса в виде венцов 14 и 15 статора, а также через зубцы ротора 2. Вращаюпщй момент, возникающий при сложении и вычитании магнитных потоков обмотки 5 и постоянного магнита 4, поворачивает ротор 2 в сторону наибольшей проводимости. По окончании импульса тока под действием реактивного момента, обусловленного наличием фиксатора 10, ротор 2 переходит в следующее устойчивое положение. 2 з.п. ф-лы, 27 ил. i (Л to Ч О fPae.f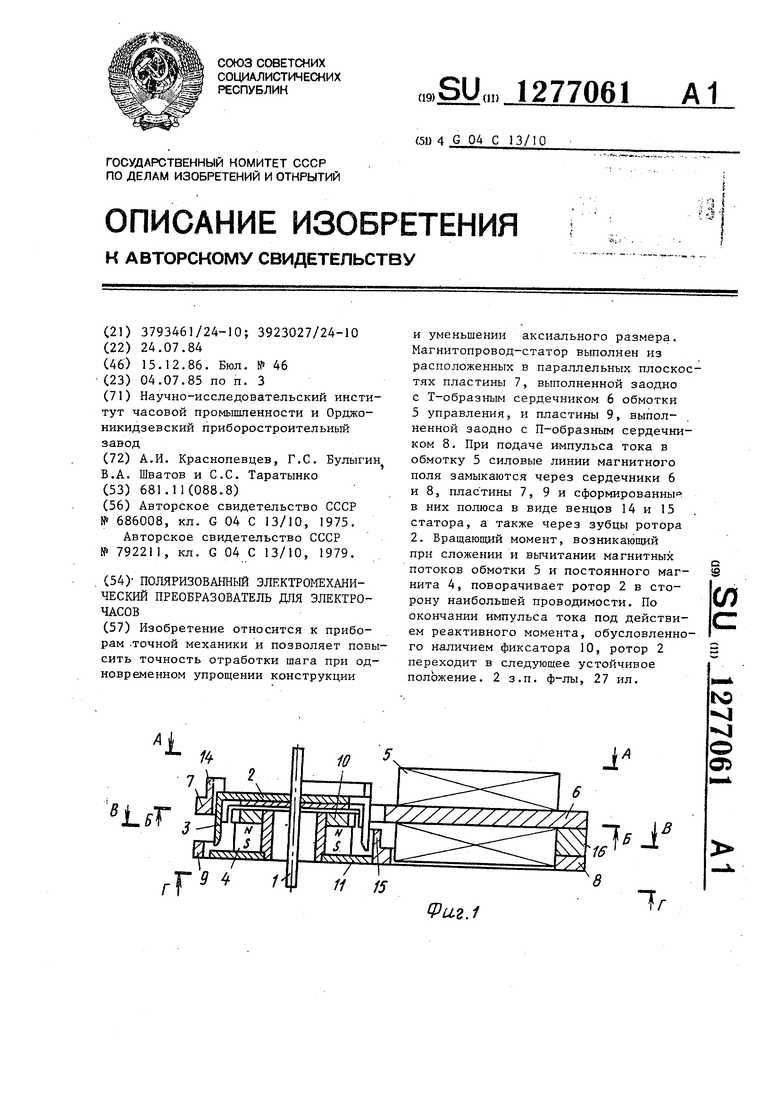
28
В 19
Р
9и.г8
22 Iff77
21 22 1
23 19 7
(Ри.г9
/б
41 ил. 11
«г
Фиг. 12
сраг. 13
(Piiz. П
.г. 15
И
иииииииииУУЦЦи 30
Illllllllllllllllllllllilllirr
D
тт lllllllHllllllllllllllllllirr €
D
(PtlZ.IS
.30..,
fpaz 17
VU2. 18
Vuz.W
(PU2.21
Риг.22
10W
J7/
}8
T7
JW
IS
фиг
Фиг. 25
17 15
1 - W 10 21 15
fpu2.16
Фа2.г1
| Поляризационный электромеханический преобразователь для электрочасов | 1975 |
|
SU686008A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Поляризованный электромеханический преобразователь для электрочасов | 1979 |
|
SU792211A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| , (54)- ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЛРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОЧАСОВ | |||
