Изобретение относится к электротехнике, автоматике и ультразвуковой технике и может быть использовано в силовых преобразователях микроперемещений, электроакустических преобразователях, шаговых устройствах.
Известен способ управления пьезомагнитным стержнем шагового двигателя, заключающийся в формировании величины импульса управляющего воздействия в обмотке стержня в зависимости от требуемого шага перемещения.
Недостаток такого способа заключается в присутствии остаточных деформаций в низком КПД из-за потерь на гистерезис, вихревые токи и низкая выходная мощность преобразователя.
Наиболее близким к предлагаемому способу является способ управления пьезопреобразователем шагового двигателя, заключающийся в формировании величины напряжения на пьезопреобразователе в зависимости от требуемого шага перемещения.
Этот способ управления обладает низким КПД из-за наличия высоких потерь на гистерезис и невысокой выходной мощностью преобразователя.
Цель изобретения - повышение КПД преобразователя.
Поставленная цель достигается тем, что формируют дополнительное поперечное управляющее поле, отстающее во времени на π/2 относительно продольного управляющего поля.
Способ основан на следующем. Правило четных эффектов Акулова для стрикционного материала можно представить в виде:
ε┴= -νaλп, где λп - стрикционная деформация в направлении приложенного поля;
ε┴- механическая деформация в направлении, перпендикулярном, направлению приложенного поля;
νa=  - 1 - коэффициент Пуассона стрикционного материала, находящегося под влиянием (электрического или магнитного) поля;
- 1 - коэффициент Пуассона стрикционного материала, находящегося под влиянием (электрического или магнитного) поля;
Ea=E/(1-Kм2) - модуль упругости в направлении приложенного поля;
σ - модуль упругости в направлении, перпендикулярном направлению приложенного поля;
E - модуль упругости, измеренный в том же направлении, что и Ea, но без наличия поля;
Kм2 - коэффициент магнитомеханической связи.
Для магнитострикционного сплава 49КФ Ea=2,1˙1011H/м2,E=1,7˙1011H/м2,
σ=0,7˙1011H/м2
(H=1000A/м)
νa=0,5.
Будем считать направление, в котором происходит перемещение, продольным, а перпендикулярное ему - поперечным.
С помощью поперечного управляющего поля можно обеспечить следующее условие ε┴≥εr, в котором поле, приложенное в поперечном направлении к стрикционному элементу, осуществляющему продольное прецизионное перемещение, создает в продольном направлении относительную стрикционную деформацию ε┴, величина которой перекрывает остаточные продольные деформацииεr после снятия продольного поля. При ε┴=εr устраняется механический гистерезис за счет снятия остаточных деформаций до нуля, а при ε┴>εr увеличивается выходная мощность преобразователя. Это ведет к повышению КПД.
η = 
PΣ=Pмех+Pг+Pэл, где PΣ - суммарные потери;
P2 - полезная выходная мощность;
Pмех - механические потери (вязкое трение среды, трение в опорах);
Pэл- электические потери,
Pэл≃ 0;
Pг - потери на гистерезис, определяемые площадью механической петли, которые уменьшаются за счет снятия остаточных деформаций поперечным полем.
Нелинейность такой механической характеристики можно уменьшить сжатием или растяжением стрикционного элемента в зависимости от знака его продольной стрикционной деформации. На полученной таким способом ε┴=εr , линеаризованной механической характеристике стрикционного элемента можно осуществлять линейный режим работы, при котором форма выходного перемещения не будет искажаться под влиянием гистерезиса и не зависеть от частоты управляющего воздействия.
Полезная мощность P2 для магнитострикционных устройств пропорциональна магнитострикционной силе Fм и величине перемещения Δ
P2=  где Fдин=Fм-Fy-Fд+Fc - динамическое усилие;
где Fдин=Fм-Fy-Fд+Fc - динамическое усилие;
t - время перемещения;
Fy - сила упругости;
Fд - демпфирующее усилие;
Fc - поджимающее (растягивающее) усилие.
При действии продольного и поперечного магнитных полей, сдвинутых на π /2
FM*=(dM+νadM)Ea˙S˙H, где dM - продольный пьезомагнитный модуль;
νa dM - поперечный пьезомагнитный модуль;
S= Sпрод= Sпоп - площади сечений магнитострикционного элемента в продольном и поперечном направлениях;
H=Hпрод=Hпоп - продольная и поперечная напряженности магнитных полей.
Для сплава 49КФ νa =0,5, тогда
FM*= 1,5dM˙Ea˙S˙H= 1,5˙FM и магнитострикционное перемещение будет равно Δ*=1,5˙Δ. Если Fc=0, тогда полезная мощность
P2*=(FM*-Fy-Fд)˙Δ*/t а два раза больше полезной мощности P2 от действия на магнитострикционный элемент только продольного магнитного поля. Если Fc≠0, то Δ**≃2˙Δ, FM**≃2˙FM и тогда полезная мощность P2** будет в четыре раза больше полезной мощности P2. Способ управления, когда ε┴>εr, позволяет в полном объеме использовать существующие возможности стрикционного элемента, осуществляющего продольные перемещения.
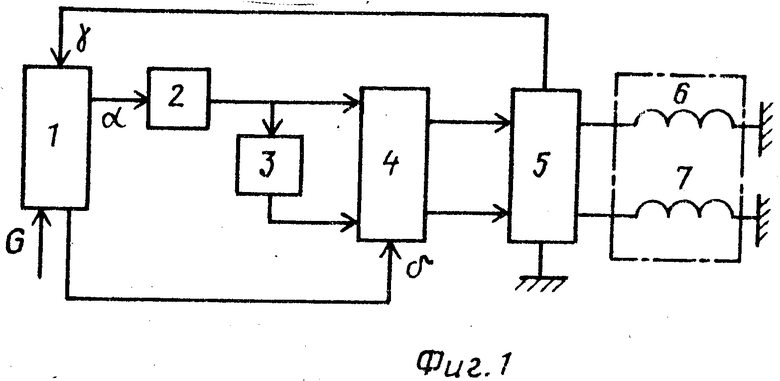
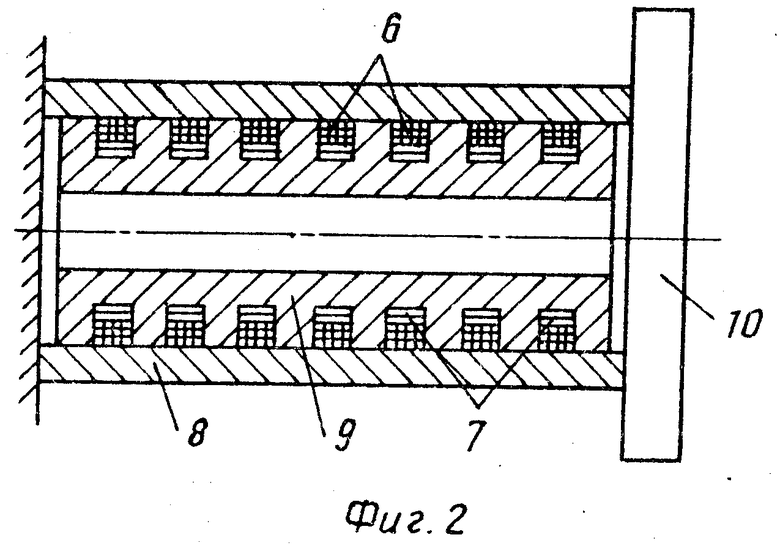
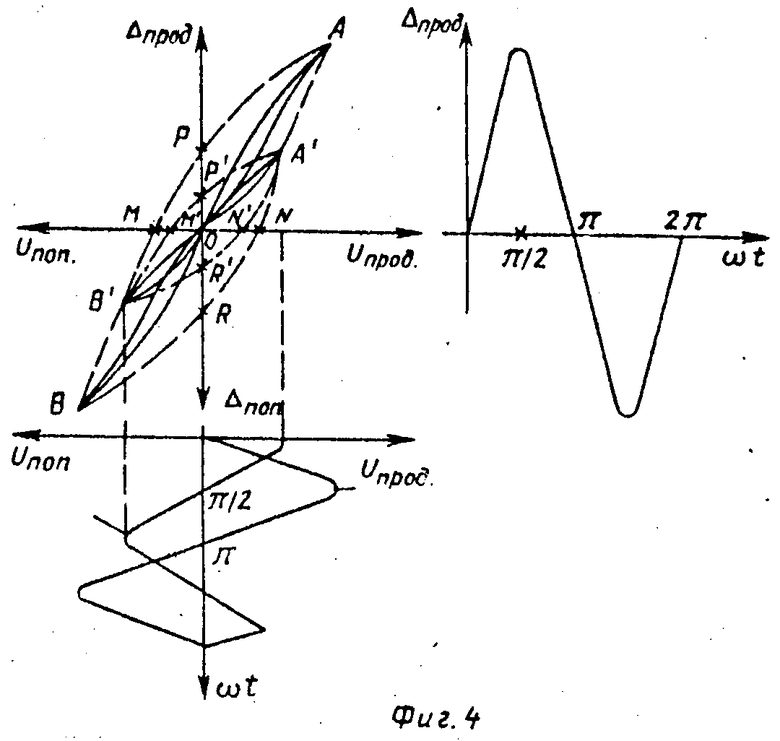
На фиг. 1 изображен один из вариантов устройства, реализующего способ управления; на фиг. 2 - разрез магнитострикционного преобразователя; на фиг. 3 - продольная развертка намагничивающей системы; на фиг. 4 - графики зависимостей Uпрод=f(ωt) и Uпоп=f(ωt), совмещенные угловые зависимости продольного и поперечного электрических полей: Δпрод =f(Uпр) и Δпоп=f(Uпоп), совмещенные зависимости петель электромеханического гистерезиса пьезоэлемента в продольном (APMBRNA - штрих) и поперечном (A'P'M'B'R'N'A' - штрихпунктир) направлениях: Δпрод=f(ωt) угловая зависимость продольной механической деформации, полученная отражением зависимостей Uпрод=f(ωt) и Uпоп= f(ωt) от результирующей продольной электромеханической кривой ОАОВО; ОА'OB'O - результирующая поперечная электромеханическая кривая; на фиг. 5 - зависимость при синусоидальном управлении и снятии остаточных деформаций Hпрод= f(ωt) и Hпоп=f(ωt), совмещенные временные зависимости продольной и поперечной напряженностей магнитного поля; εпрод=f(Hпрод) и εпоп=f(Hпоп), совмещенные зависимости петель механического гистерезиса магнитострикционного элемента в продольном (AECDEFA - штрих) и поперечном (A'E'C'D'E'F'A' - штрихпунктир) направлениях; εпрод=f(ωt) - угловая зависимость продольной механической деформации, полученная отражением зависимостей Hпрод=f(ωt) и Hпоп=f(ωt)от результирующей продольной магнитомеханической кривой OAODO.
Устройство, реализующее способ управления (фиг. 1) магнитострикционным преобразователем, содержит управляющее устройство (ЭВМ) 1, ждущий генератор 2, линию задержки (фазовращатель) 3 на π /2, ключи 4, блок сравнения и усилители мощности 5, продольную (цилиндрическую) обмотку 6 и поперечную (тороидальную) обмотку 7 магнитострикционного преобразователя. Магнитострикционный преобразователь по фиг. 2 и 3 состоит из магнитострикционного элемента 8, намагничивающей системы 9 с обмотками 6 и 7 и нагрузки 10. В такой конструкции намагничивающей системы от витков тороидальной и цилиндрической обмоток в соседних продольных рядах зубцов (например, ряд зубцов 11 и ряд зубцов 12, фиг. 3) создаются правовинтовые (или левовинтовые) и левовинтовые (или правовинтовые) знакопеременные магнитные потоки, которые в результате их некоторого сложения закручивание магнитострикционного элемента не дадут.
Устройство, реализующее способ управления, работает следующим образом.
По фронту запускающего импульса α запускается ждущий генератор 2, настроенный на определенную частоту, гармонический сигнал которого поступает через ключ 4 в блок сравнения и усилителя мощности 5, а оттуда в цилиндрическую обмотку 6. Тот же сигнал с генератора 2, задержанный на π/2 в линии задержки 3, проходит через свой ключ 4, блок 5 в тороидальную обмотку 7. Исходное состояние ключей 4 замкнутое. Блок 5 вырабатывает сигнал сравнения j двух управляющих воздействий, который совместно с сигналом обратной связи σ (например, с датчика перемещений, таймера) поступает в устройство 1, которое вырабатывает сигнал δ на отключение ключей 4 продольного и поперечного воздействий.
Способ управления стрикционными преобразователями состоит в следующем.
Под действием гармонического продольного управляющего поля и гармонического поперечного управляющего поля, отстающего на π /2 от продольного поля, стрикционный элемент совершает продольные механические колебания. Если величина поперечного поля подобрана так, что достигается равенство ε⊥= εr, то стрикционный элемент будет совершать колебания без механического гистерезиса. По фиг. 4 рабочая точка пьезоэлемента в продольном направлении перемещения будет совершать движение по петле OAOBO, а в поперечном направлении - по петле OA'OB'O. Для магнитострикционного элемента рабочая точка в продольном направлении будет совершать движение по петле OAODO, а в поперечном направлении - по петле O'D'O'A'O'. Если же ε⊥= εr, то увеличивается диапазон перемещения (продольного) за счет поперечной деформации стрикционного элемента и увеличивается полезная мощность преобразователя.
Гармонические колебания продольного и поперечного полей пьезоэлемента и магнитострикционного элемента прекращаются в момент времени, когда достигается равенство Uпрод=  U
U , Uпрод=
, Uпрод=  U
U . В момент снятия поперечного и продольного полей возникают свободные колебания поперечной и продольной деформаций, противоположных по знаку согласно правилу Акулова, при этом максимумы перерегулирований продольной ζII и поперечной ζ⊥ свободных колебаний будут связаны соотношением ζ⊥= -
. В момент снятия поперечного и продольного полей возникают свободные колебания поперечной и продольной деформаций, противоположных по знаку согласно правилу Акулова, при этом максимумы перерегулирований продольной ζII и поперечной ζ⊥ свободных колебаний будут связаны соотношением ζ⊥= - .
.
Полностью активно задемпфировать продольный переходный процесс, соблюдая вышеприведенные соотношения, можно лишь при условии равенства продольной и поперечной частот свободных колебаний (ωM=ωпрод=ωпоп):
ωМ= ωпрод=  =
=  = ωпоп где mпрод=ρSпрод lм - масса магнитострикционного элемента - трубки в продольном направлении;
= ωпоп где mпрод=ρSпрод lм - масса магнитострикционного элемента - трубки в продольном направлении;
mпоп= ρSпоп2π rср - масса стрикционного элемента в поперечном направлении;
rср - средний радиус стрикционного элемента;
ρ - плотность стрикционного элемента;
lм - длина стрикционного элемента;
K - коэффициент упругости в поперечном направлении;
- коэффициент упругости в поперечном направлении;
K - коэффициент упругости в продольном направлении.
- коэффициент упругости в продольном направлении.
Из соотношения равенства частот колебаний следует rср= lм.
Таким образом, предлагаемый способ управления стрикционным преобразователем позволяет уменьшить его потери на гистерезис и вихревые токи, а также повысить полезную мощность и диапазон перемещения, что приводит к повышению КПД преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ГИСТЕРЕЗИСОВ СТРИКЦИОННЫХ УСТРОЙСТВ | 1992 |
|
RU2069109C1 |
| СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1989 |
|
RU2012031C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1992 |
|
RU2068574C1 |
| Способ управления магнитострикционным шаговым исполнительным устройством | 1988 |
|
SU1616488A1 |
| Устройство для измерения динамической магнитострикции | 1985 |
|
SU1307408A1 |
| Способ относительного перемещения и устройство для его осуществления | 1989 |
|
SU1828564A3 |
| ШАГОВЫЙ СТРИКЦИОННЫЙ ДВИГАТЕЛЬ И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2746793C1 |
| МАГНИТОСТРИКЦИОННАЯ УСТАНОВКА | 1995 |
|
RU2116144C1 |
| Преобразователь перемещений | 1990 |
|
SU1805291A1 |
| Задвижка со стрикционным приводом в затворе | 2021 |
|
RU2756491C1 |


Изобретение относится к электротехнике, автоматике и ультразвуковой технике, может быть использовано в силовых преобразователях микроперемещений, электроакустических преобразователях, шаговых устройствах. Цель изобретения - повышение КПД преобразователя. Согласно изобретению, дополнительно к операции формирования продольного управляющего поля на преобразователе в зависимости от требуемого перемещения, формируют поперечное поле, которое отстоит во времени на π/2 относительно продольного управляющего поля. Совокупность таких полей позволяет уменьшить потери преобразователя на гистерезис и вихревые токи, а также повысить полезную мощность. 5 ил.
СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ ПРЕОБРАЗОВАТЕЛЕМ, заключающийся в формировании продольного управляющего поля на преобразователе в зависимости от требуемого перемещения, отличающийся тем, что, с целью повышения КПД преобразователя, дополнительно формируют поперечное управляющее поле, отстающее во времени на π/2 относительно продольного управляющего.
| Пьезоэлектрический линейный шаговый двигатель | 1978 |
|
SU752560A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
