Изобретение относится к прецизионным шаговым исполнительным устройствам и может быть использовано в высокоточном станкостроении, в лазерных и оптических приборах.
Цель изобретения - повышение точности отработки заданных перемещений.
На фиг. 1 изображено магнитострикци- онное шаговое устройство, разрез: на фиг. 2 - переходные процессы в двух зажимах Igi
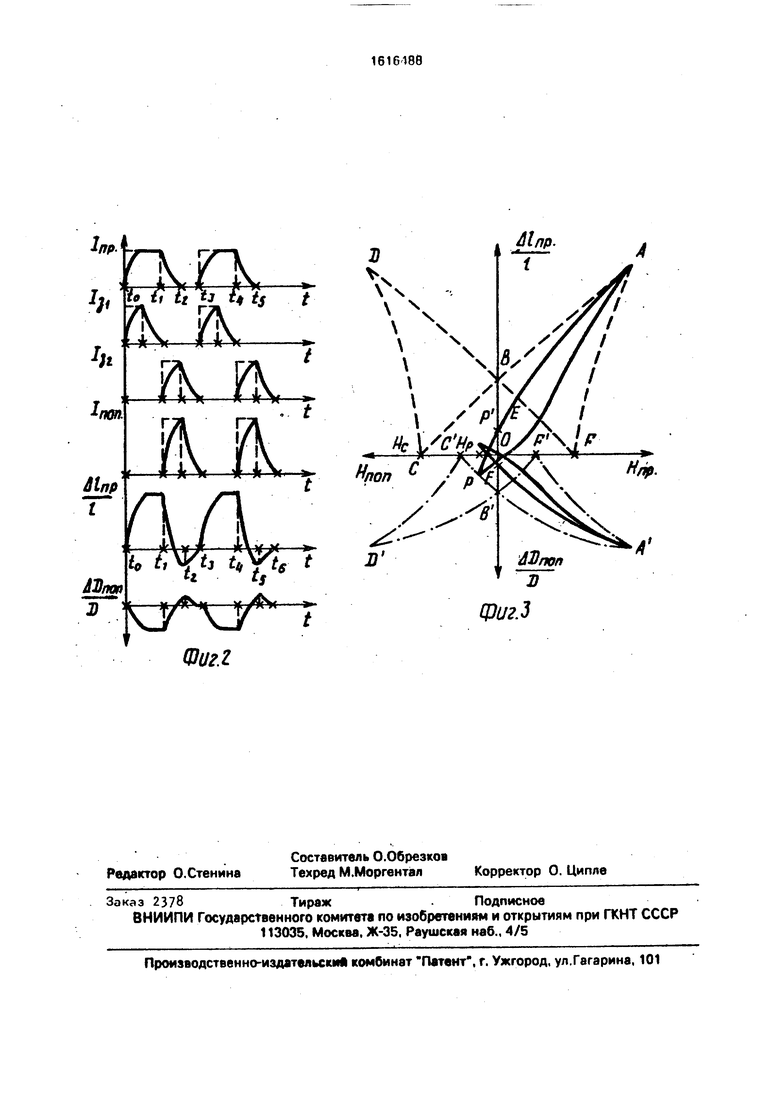
), IgJ - f(t). продольной Inp f (t) и ПОПбречной1поп f(t) обмотках импульса одной полярности, а также переходные процессы относительного смещения магнитострикци- онного элемента в продольном Л1пр/1- 1(х)и поперечном ЛОпоп/О f(t) направлениях, управляемых от импульсной цифровой сис- на фиг. 3 - движение рабочей точки
магнитострикционного движущего элемента по магнитомеханической кривой в продольном и поперечном направлениях.
Магнитострикционноё линейное шаговое исполнительное устройство состоит из зажимов 1 и 2. магнитострикционной трубки 3 с нагрузкой 4. магнитопровода 5, расположенного внутри трубки с обмоткой 6, создающей продольное поле, обмотки 7, создающей поперечное поле и уложенной в отверстия магнитострикционной трубки 8 и отверстие 9 магнитопровода 5. направляющей 10. На фиг. 3 ABCDBFA - четная магни- томехЬничес.кая петля продольной деформации и A B C D B F A- четная магни- томеханй|4еская петля поперечной деформации, полученные под действием приложенного к магнитострикционному
с is о
элементу продольного магнитного поля Нпрод без поперечного поля Нпоп. Отрезки ОВ и ОВ соответствуют остаточным деформациям в продольном и поперечном направлениях после снятия продольного магнитного поля Нпрод без участия поперечного магнитного поля. Кривые ОА и ОА характеризуют процесс смещения рабочей точки магнитострикционной трубки в продольном и поперечном направлении соот- вет ственно. Кривые АЕРО и А К Р О характеризуют процесс смещения рабочей точки в исходное (точка 0) положение при снятии остаточных деформаций магнито- стрикционного элемента импульсом поперечного поля Нр (релаксационное коэрцитивное магнитное поле), приложенного в точках А и А . Рабочие точки в продольном и поперечном направлениях за счет возрастания поперечного поля Нр Н поп и спада продольного поля Нпрод,двигаясь из точек А и А , проходят через ось абсцисс (Нпоп Нпрод) и образуют нечетные магни- томеханические петли в продольном направлении ОАЕРО и в поперечном направлении . Экспериментально можно подобрать такую величину импульса управляющего воздействия в обмотке 7 8 зависимости от величины управляющего воздействия в обмотг,:е 6 магнитно- го поля Нпрод, чтобы полностью снять остаточные деформации как а продольном, так и в поперечном направлении, причем величина магнитного поля Нр будет одинакова для обеих направления снятия остаточ- ных деформаций магнитострикционного элемента из-за однородности кристаллической структуры материала.
Пусть нужно переместить нагрузку в прямом направлении, т.е. по фиг. 1. В исходном состоянии обмотки устройства обесточены, фиксаторы зажимают магнито- стрикционный элемент, В момент времени to подают импульс управляющего воздействия в обмотку 6 такой величины, чтобы пе-
0 0 5
0 5
5
0
5
реместить нагрузку на нужное расстояние, и одновременно включают ближниЛ к нагрузке зажим 1. Происходит перемещение нагрузки. После достижения .нужного перемещения снимают управляющее воздействие с зажима 7, ,и он фиксирует магнитострикцуюнный элемент в момент времени ti. После фиксации зажимом магнитострикционного элемента снимают импульс управляющего воздействия (момент времени ti, ti) с обмотки 6 и одновременно подают, а затем снимают управляющее воздействие зажима 2 и тороидальной обмотки 7. За время рабочего цикла рабочая точка магнитострикционной трубки в продольном направлении соверщит движение по кривой ОАЕРО, а рабочая точка в поперечном направлении - по кривой ОА н Р О, Далее цикл отработки нужного щага перемещения в прямом направлении повторяют (интервал времени ta-te). За время t-t3, t4-t8 происходит полное снятие продольных и поперечных остаточных деформаций.
Формула изобретения Способ управления магнитострикцион- ным шаговым исполнительным устройством, при котором закрепляют первый дальний от нагрузок зажим, подают управляющее воздействие на магнитострикцион- ный деформируемый элемент путем создания в нем продольного магнитного поля, закрепляют второй зажим, одновременно с этим раскрепляют первый зажим и си.имают управляющее воздействие с магнитострикционного деформируемого элемента, отличающийс я тем, что, с целью повышения точности отработки заданных перемещений, одновременное рас креплением дальнего от нагрузки зажима создают поперечное магнитное поле а маг- нитострикционном деформируемом элементе величиной, достаточной для снятия нем остаточных деформаций.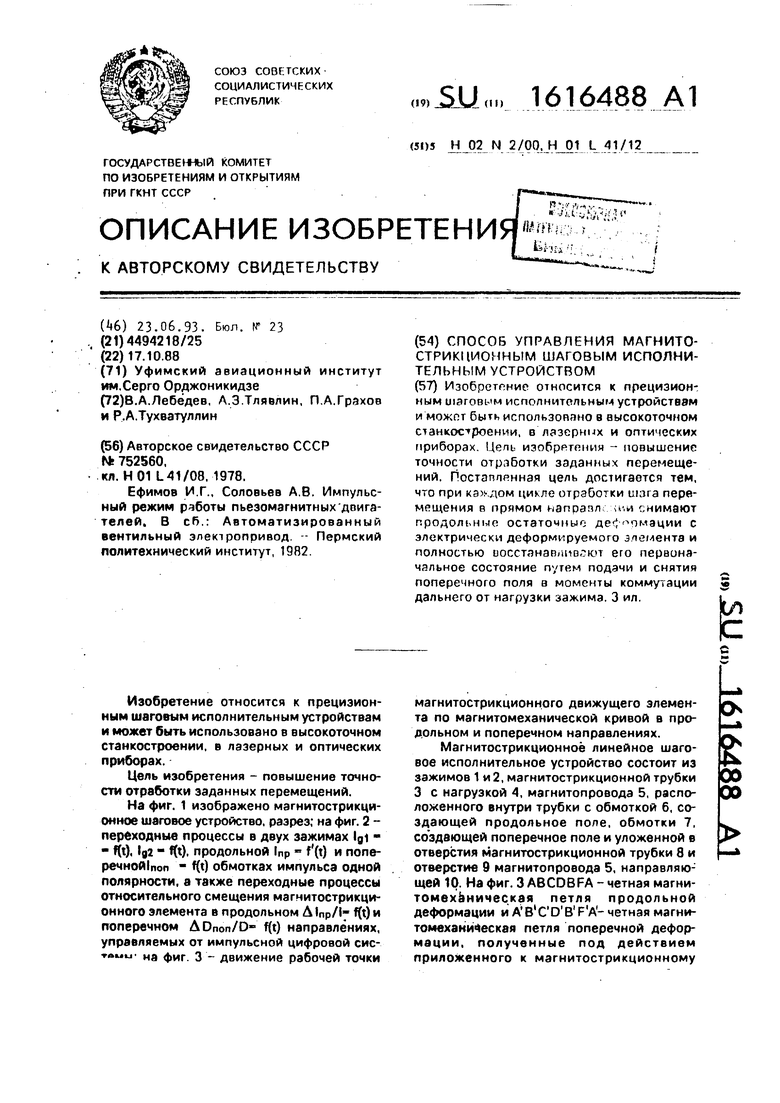

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ПОЗИЦИОНИРУЮЩЕГО МЕХАНИЗМА ДИСКРЕТНОГО ДЕЙСТВИЯ | 1991 |
|
RU2028716C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРИКЦИОННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1989 |
|
SU1734556A1 |
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1542375A1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| Магнитострикционный шаговый двигатель | 1981 |
|
SU993791A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU428910A1 |
| СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ | 1989 |
|
RU2012031C1 |
| Способ управления магнитострикционным фиксатором | 1988 |
|
SU1557387A1 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО | 1984 |
|
SU1841112A1 |
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1491299A1 |
Изобретение относится к прецизионным uiaroBUM исполнительным устройствам и можпт быть использовано в высокоточном станкостроении, в лазерных и оптических приборах. Цель иэобрртоиия - повышение точности отработки заданных перемещений. Постаппрнная цель достигается тем. что при каждом цикле отработки шага перемещения в прямом напрапл; а .и снимают продольные остаточиыо де | омации с электрически деформируемого эле/ чента и полностью иосстанав/1ивгют его первоначальное состояние путем подачи и снятия поперечного поля в моменты коммутации дальнего от нагрузки зажима. 3 ил.
fe
у////////////////////7/: | хуух:
aSVvV t 1 yff7i t i t T v l n T -L -Vv jC, HAfAVffflfrj rt 7 irt fnf tV5 k-HtMI |lllt Uljlllllll tlHfHH4 H.TiJ I.N -, чЛ-VN V . - X - чХИа
--4
Фиг. г
фиг.З
| Пьезоэлектрический линейный шаговый двигатель | 1978 |
|
SU752560A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Ефимов И.Г. | |||
| Соловьев А.В | |||
| Импульсный режим работы пьеэомагнитных двигателей | |||
| В сб.: Автоматизированный вентильный электропривод | |||
| - Пермский политехнический институт, 1982. | |||
