Изобретение относится к электротехнике и автоматике и может быть использовано при создании систем управления стрикционными исполнительными механизмами дискретного действия для прецизионных перемещений в оптико-механических, электромеханических и электронных приборах.
Известен способ построения системы управления, позволяющий задемпфировать исполнительный орган за период свободных колебаний Тм = 20 π путем формирования управляющего воздействия по одному каналу управления [1] .
Недостаток способа заключен в невозможности задемпфировать исполнительный орган меньше, чем за 2 π .
Наиболее близким к заявляемому является способ управления пьезодвигателем, заключающийся в том, что измеряют действительное положение выходной координаты пьезодвигателя, определяют рассогласование между заданным и действительным положениями выходной координаты, формируют управляющее воздействие на пьезодвигатель в зависимости от рассогласования, при этом управляющее воздействие на пьезодвигатель формируют в дискретные моменты времени с интервалом, равным половине периода собственных колебаний пьезодвигателя, как сумму управляющего воздействия и величины рассогласования, соответствующей предыдущему моменту времени, и величины рассогласования, соответствующей текущему моменту времени [2] .
Недостаток способа управления также заключен в невозможности задемпфировать пьезодвигатель меньше, чем за 2 π .
Целью изобретения является повышение динамической точности позиционирования.
Цель достигается тем, что фиксируют максимальную величину разностного сигнала, пропорционально ей формируют поперечное управляющее воздействие и подают его на вход поперечной деформации стрикционного исполнительного механизма в момент первого равенства нулю разностного сигнала.
Для стрикционных материалов справедливо правило Акулова: λпоп= -ν·λпрод , где ν - коэффициент Пуассона стрикционного материала; λпоп - поперечная стрикция; λпрод - продольная стрикция. Из этой формулы следует, что при подаче ступени управляющего воздействия продольной деформации исполнительный механизм продольно удлиняется, а поперечно сокращается. При подаче ступени управляющего воздействия поперечной деформации исполнительный механизм поперечно удлиняется и сокращается продольно. Следовательно, существует возможность активно задемпфировать продольные свободные колебания исполнительного механизма путем возбуждения поперечной механической деформации стрикционного исполнительного механизма в момент времени первого равенства нулю разностного сигнала с помощью поперечного управляющего воздействия, пропорционального максимальной величине разностного (максимума сигнала рассогласования). При этом фазы свободных колебаний от продольной и поперечной механических деформаций сдвинуты относительно друг друга на половину периода продольных свободных колебаний и должны взаимокомпенсироваться. Однако полная взаимокомпенсация происходит тогда, когда постоянные времени колебаний стрикционного механизма в продольном и поперечном направлениях одинаковы: Тмпоп = Тмпрод. Для стрикционного механизма, описанного колебательным звеном второго порядка, это равенство соответствует равенству коэффициентов упругости в продольном и поперечном направлениях:
E·Sпрод/lпрод = G·Sпоп/lпоп, где Е - продольный модуль упругости; G - поперечный модуль упругости; Sпрод, Sпоп, lпрод, lпоп - сечения и длины соответственно в продольном и поперечном направлениях.
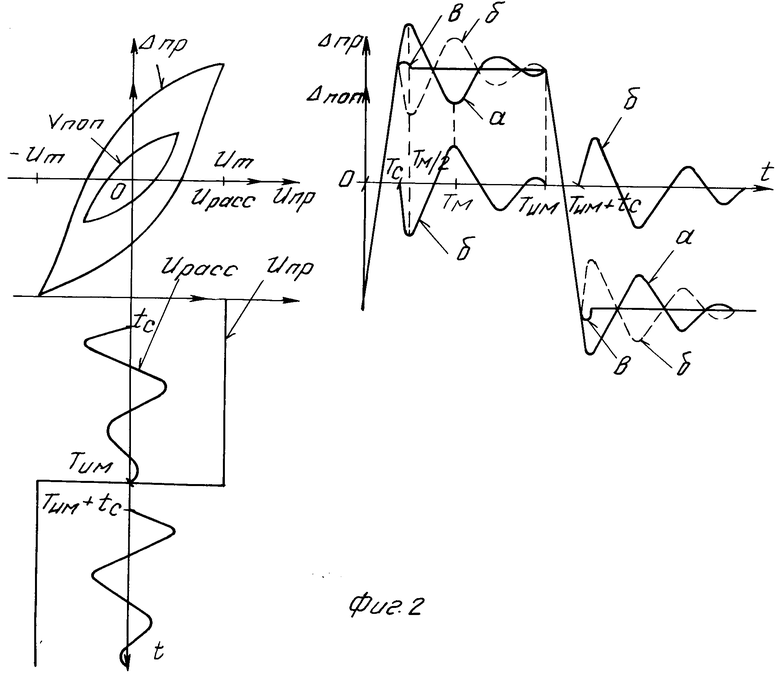
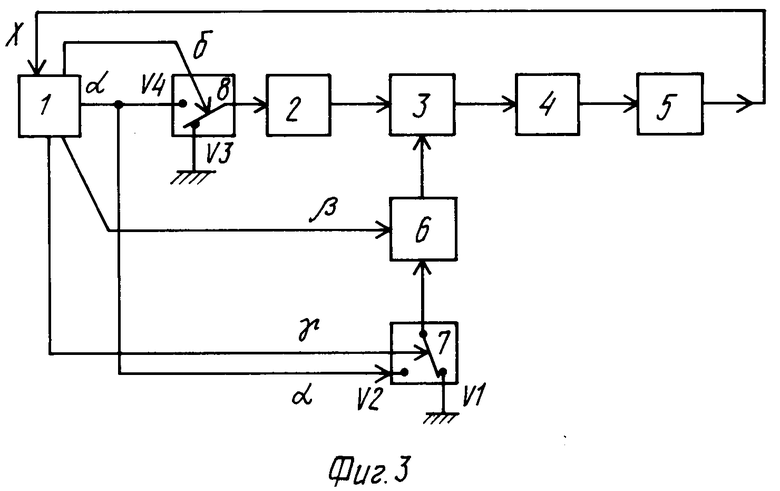
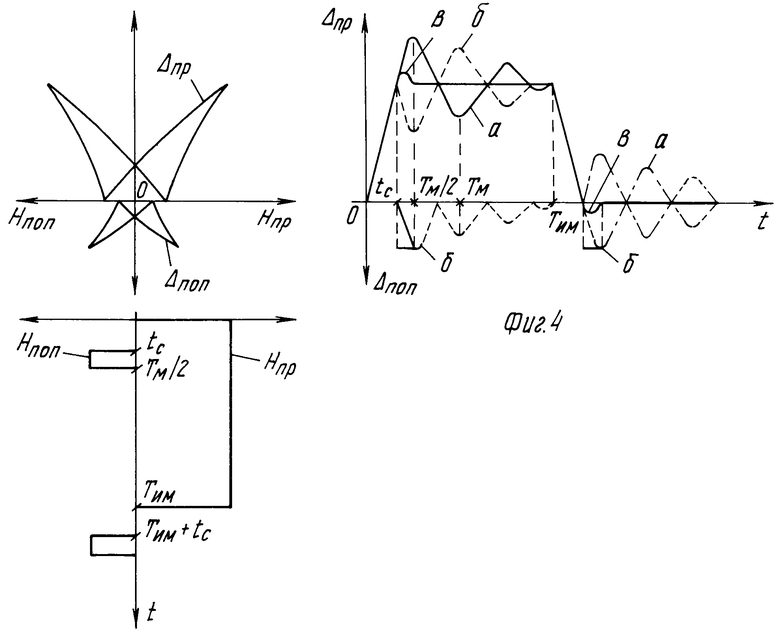
На фиг. 1 представлен первый вариант устройства, реализующий предлагаемый способ; на фиг. 2 - временные диаграммы работы пьезомеханизма, поясняющие действие способа первого варианта устройства, где Uпр = f(t) - изменение ступени управляющего воздействия продольной механической деформации; Uрасс = f(t) - изменение управляющего воздействия поперечной деформации; Δпр= f(Uпр) - статическая продольная электромеханическая характеристика пьезомеханизма; Δпр = f(t) - временная зависимость продольного перемещения нагрузки; Δпоп = f(t) - временная зависимость поперечного перемещения нагрузки; Δпоп = f(Uрасс) - стическая поперечная электромеханическая характеристика пьезомеханизма; на фиг. 3 представлен второй вариант устройства, реализующий предлагаемый способ; на фиг. 4 - временные диаграммы магнитострикционного механизма, поясняющие действие способа второго варианта устройства, где Нпр = f(t) - изменение ступени намагничивающего поля продольной механической деформации; Нпоп = f(t) - изменение импульса намагничивающего поля поперечной механической деформации; Δпр= f(Hпр) - продольная магнитомеханическая характеристика магнитострикционного механизма; Δпоп = f(Hпоп) - поперечная магнитомеханическая характеристика магнитострикционного механизма; Δпр= f(t) - продольная временная зависимость перемещения нагрузки; Δпоп = f(t) - поперечная временная зависимость перемещения нагрузки.
В качестве стрикционного механизма на фиг. 2 может быть применен магнитострикционный механизм, а на фиг. 4 - пьезомеханизм.
Устройство позиционирования по фиг. 1 содержит блок 1 задания, усилитель 2, стрикционный механизм 3, нагрузку 4, датчик 5 положения, усилитель 6 поперечной деформации и ключ 7.
Устройство позиционирования по фиг. 3 содержит кроме описанных блоков ключ 8.
Работа каждого устройства включает в себя два этапа: этап тренировки и рабочий этап. На этапе тренировки фиксируют максимум разностного сигнала.
Блок 1 задания представляет собой программное устройство. Он включает в себя устройство управления (процессор), устройство определения экстремума, ЦАП, АЦП, сумматоры, регистры хранения, счетчики, компаратор. Однако алгоритм работы блока задания каждого устройства свой.
Устройство по фиг. 1 и 2 работает следующим образом.
Этап тренировки. Блок 1 задания формирует ступень заданного управляющего воздействия максимально возможной величины aмакс через ЦАП в канал продольного перемещения. В момент равенства нулю разностного сигнала или равенства сигналов заданного и действительного положения выходной координаты блок 1 задания формирует сигнал ν на переключение ключа 7 из положения V1 в положение V2, при этом сигнал рассогласования Uрасс поступает через усилитель 6 поперечной деформации в канал поперечного перемещения. В блоке 1 происходит вычисление
(aмакс-κмакс)/aмакс≅ε, где κмакс= aмакс+ζмакс - максимальное отклонение сигнала действительного положения выходной координаты; ε- заданная точность вычисления; ζ - максимум рассогласования сигналов заданного и действительного положения выходной координаты. Ключ 7 переключается в положение V1, и ступень максимального заданного управляющего воздействия снимают. Если соотношение (1) не выполняется, то блок 1 задания дискретно изменяет коэффициент усиления усилителя 6 сигналом β и указанные ранее действия повторяются до выполнения соотношения (1).
Рабочий этап.
Пусть пьезомеханизм находится в устойчивом положении, соответствующем величине - Δm, при этом пьезомеханизм сжат отрицательным напряжением. В зависимости от требуемого перемещения нагрузки блок 1 задания формирует ступень управляющего воздействия а меньшей или равной по величине ступени амакс. В момент равенства нулю разностного сигнала (момент времени tс) блок 1 задания вырабатывает сигнал ν на переключение ключа 7 из положения V1 в положение V2. Выходной сигнал действительного положения выходной координаты, усиливаясь в усилителе 6, поступает на контактные пластины поперечной механической деформации. Происходит активное демпфирование свободных продольных колебаний (кривая в на фиг. 2). На фиг. 2 свободные колебания а происходят от ступени заданного управляющего воздействия продольной механической деформации, а свободные колебания б - от сигнала рассогласования поперечной механической деформации. По достижении нагрузок заданного положения Δm блок 1 задания снимает сигнал ν и ключ 7 возвращается в положение V1. Аналогично происходит возвращение нагрузки в исходное положение по прекращении действия ступени заданного управляющего воздействия продольной механической деформации длительности Тим.
Приведенное устройство обладает универсальностью, так как позволяет демпфировать продольные свободные колебания стрикционного исполнительного механизма, работающего как на постоянную, так и на упругую нагрузку, за время Тм/2.
Устройство по фиг. 3 и 4 работает следующим образом.
Этап тренировки.
Исходное положение ключей: ключ 7 находится в положении V1, ключ 8 - в положении V4. Блок 1 задания формирует ступень заданного управляющего воздействия максимально возможной величины амакс через ЦАП и ключ 8 в канал продольного перемещения. Запоминаются в блоке задания величина максимума рассогласования ζ1макс= κ1макс-a1макc заданного и действительного положения выходной координаты и интервал времени (Тм/2 - tc). Блок 1 задания формирует импульс δ на переключение ключа 8 в положение V3, формируя тем самым срез ступени управляющего воздействия продольной механической деформации. Запоминаются в блоке 1 задания величина максимума рассогласования ζ2мкас= κ2макс-a2макс и интервал времени (Тм/2 - tc)2. Блок задания формирует сигнал ν длительности (Тм/2- tc)1 на коммутацию ключа 7 в положение V2 максимальной величины сигнала заданного амакс, тем самым формируя импульс, который, усиливаясь, поступает в канал поперечной деформации стрикционного механизма. Сравнивают максимум рассогласования ζ1макс с максимумом рассогласования ζ1максI действительного положения выходной координаты от импульса, поданного в канал поперечной деформации. Если сигналы не равны, то блок 1 задания формирует сигнал β на дискретное изменение коэффициента усиления усилителя 6 и предыдущее действие повторяют до равенства ζ1макс= ζ1максI. Запоминают значение сигнала β1макскоэффициента усиления усилителя 6. Блок 1 задания формирует сигнал νдлительности (Тм/2 - tc)2 на коммутацию ключа 7 и положение V2 максимальной величины сигнала задания амакс. Сравнивают максимум рассогласования ζ2макс с максимумом рассогласования ζ2максIдействительного положения выходной координаты от импульса. Если сигналы не равны, то блок 1 задания формирует сигнал β на дискретное изменение коэффициента усиления усилителя 6 и предыдущее действие повторяют до равенства ζ2макс= ζ2максI . Запоминают значение β2макс коэффициента усиления усилителя 6.
Рабочий этап.
Ключи 7 и 8 находятся в исходном положении V4 и V1. Пусть исходное положение магнитострикционного механизма соответствует рабочей точке О на зависимости Δпр = f(Hпр) (фиг. 4). Блок 1 задания формирует сигнал β1макс и ступень управляющего воздействия a≅aмакс на обмотку продольного намагничивания. В момент времени tc равенства сигнала заданного и действительного положения выходной координаты, характеризующего быстродействие достижения заданного перемещения, блок 1 задания формирует сигнал ν на коммутацию ключа 7 в положение V2 на время (Tм/2 - tc)1. Сформированный таким образом импульс величины а поступает на обмотку намагничивания, создающую поперечное магнитное поле. Происходит наложение свободных колебаний а и б на фиг. 4 от ступени и импульса и их взаимоуничтожение - в.
Процесс восстановления исходного положения магнитострикционного исполнительного механизма осуществляется следующим образом.
Блок 1 задания формирует сигнал β2макс и импульс δна переключение ключа 8 в положение V3. В момент равенства нулю разностного сигнала блок задания формирует импульс ν на переключение ключа 7 в положение V2 на время (Тм/2 - tc)2. В результате свободные колебания исполнительного механизма от действия среза ступени и импульса взаимокомпенсируются, а время регулирования уменьшается до Тм/2.
Отличие интервала времени (Тм/2 - tc)1 от (Tм/2 - tc)2 для магнитострикционного механизма обусловлено изменением его модуля упругости при намагничивании.
Таким образом, заявляемый способ повышает динамическую точность позиционирования нагрузки и обеспечивает максимально возможное время регулирования, равное половине периода Тм/2 свободных продольных колебаний стрикционного механизма с нагрузкой.
Изобретение относится к электротехнике и автоматике и может быть использовано в оптико-механических, электромеханических и электронных приборах. Цель изобретения - повышение динамической точности позиционирования. Цель достигается тем, что при максимальном быстродействии время регулирования положения нагрузки сокращается до Tм/2 ( Tм - период свободных колебаний стрикционного исполнительного механизма с нагрузкой) за счет поперечной деформации стрикционного исполнительного механизма в момент времени первого равенства нулю разностного сигнала от ступенчатого сигнала задания и измеренного сигнала выходной координаты с помощью поперечного управляющего воздействия, пропорционального максимальной величине разностного сигнала. Система, реализующая предлагаемый способ, содержит блок 1 задания, усилитель 2, стрикционный механизм 3, нагрузку 4, датчик 5 положения, усилитель 6 поперечной деформации и ключ 7. 4 ил.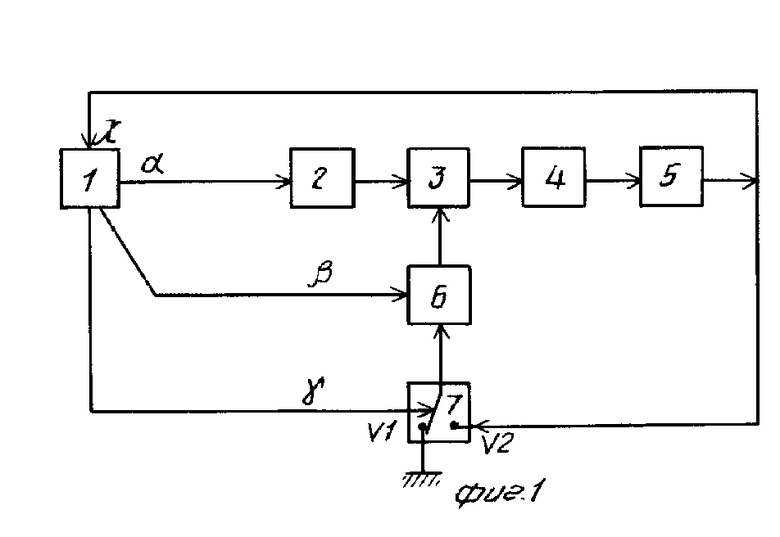
СПОСОБ ПОЗИЦИОННОГО УПРАВЛЕНИЯ СТРИКЦИОННЫМ МЕХАНИЗМОМ, заключающийся в формировании управляющего воздействия, создающего продольную механическую деформацию, пропорционально сигналу разности между ступенчатым задающим сигналом и измеренным значением текущего положения выходной координаты стрикционного механизма в дискретные моменты времени, отличающийся тем, что, с целью повышения динамической точности позиционирования в моменты равенства нулю сигнала разности дополнительно формируют управляющее воздействие, создающее поперечную механическую деформацию с интенсивностью, равной максимальной величине сигнала разности, и длительностью Tm/2, где Tm - период свободных колебаний стрикционного исполнительного механизма с нагрузкой.
