Изобретение относится к области управления процессами химической технологии, протекающими с сильным или слабым тепловыми эффектами экзо- или эндотермических реакций и осуществляемыми в реакторах смешения периодического (РПД), полунепрерывного (РПНД) и непрерывного (РНД) действий, касается, в частности, вопросов стабилизации температуры реакционной массы, может найти широкое применение в химической, химико-фармацевтической и других отраслях промышленности при производстве лекарственных препаратов, витаминов, промежуточных и целевых продуктов. Известно устройство для регулирования температуры в химическом реакторе.
содержащем теплообменники, циркуляционный насос, регулятор температуры, регулирующие клапаны на линиях подачи греющего пара и хладагента. Устройство дополнительно снабжено блоком селектиро- вания, инверторами, байпасной линией с соответствующими взаимосвями между ними.
Недостатком устройства является значительное отклонение температуры, поскольку не учитывается значение производной по от- клонению в момент смены знака самого параметра по отклонению.
Прототипом является устройство, реализующее способ автоматического управления экзотермическим процессом по предлагаемому принципу. Расход хладагента перераспределяется между параллельно соединенными теплообменниками с различными значениями коэффициентов теплопередачи таким образом, что при повы- шении температуры в реакторе увеличивается расход хладагента через теплообменник с большим значением коэффициента теплопередачи (БЗКТ) с одновременным уменьшением расхода хладагента через теплообменник с меньшим значением коэффициента теплопередачи (МЗКТ), а при понижении температуры в реакторе, наоборот, уменьшается расход хладагента через теплообменник с БЗКТ и одновременно возрастает его расход через теплообменник с МЗКТ. В качестве теплообменника с БЗКТ используется змеевик, погруженный в реактор, а в качестве теплообменника с МЗКТ служит рубашка, опоясывающая с наружной стороны корпус реактора.
Недостатком прототипа является невысокое быстродействие системы регулирова- ния температуры, что обусловлено существенной инерционностью и запаздыванием, характерным для большее ъемных реакторов ( м°), приводящее, в конечном итоге, к значительному выбегу температуры реакционной массы ( С), т.е. к низкой точности регулирования.
Цель изобретения - снижение энерго- затрат за счет повышения точности регулирования температуры реакционной массы.
Поставленная цель достигается тем, что в способе автоматического управления температурным режимом технологического про- цесса в реакторе смешения, включающем регулирование соотношения расходов хладагента, подаваемого в рубашку и змеевик, в зависимости от величины и знака отклонения текущей температуры реакционной массы от заданной, дополнительно определяют величину и знак производной по отклонению тем- пературы реакционной массы, при положительном знаке отклонения и отрицательном знаке производной по отклонению
расход хладагента в змеевик уменьшают, а в рубашку - увеличивают, при отрицательном знаке отклонения и положительном знаке производной по отклонению расход хладагента в змеевик увеличивают, а в рубашку-уменьшают, при одинаковых знаках отклонения и производной по отклонению расходы хладагента в змеевик и рубашку не изменяют.
Существенное различие в коэффициентах теплопередачи для рубашки (Кр) и змеевика (К3), когда , позволяет реализовать простой и в то же время достаточно эффективный способ автоматического управления температурным режимом в реакторе смешения путем установки на входных линиях рубашки (кактеплообменника с МЗКТ) и змеевика (как теплообменника с БЗКТ) двух регулирующих клапанов противоположных принципов действия (рубашки - НЗ, а змеевика - НО), обеспечивающих постоянство давления в линии подачи хладагента к теплообменникам реактора, что улучшает динамику регулирования температуры реакционной массы, сокращая длительность переходных процессов и уменьшая амплитудное отклонение параметра.
Наиболее нежелательной, с точки зрения проблем управления, при решении задачи стабилизации параметра считается та четверть периода колебательного процесса регулирования, когда текущее значение регулируемого параметра начинает удаляться от заданного значения, что легко определяется по равенству знаков отклонения параметра и производной этого отклонения. Именно в этот момент регулятор должен вырабатывать максимальное тормозящее (как бы отрицательное) воздействие, направленное на противодействие росту отклонения температуры. По мере отклонения температуры от задания производная этого отклонения уменьшается, хотя в первоначальный момент смены знака отклонения она максимальна и наиболее объективно характеризует динамику роста температуры, когда остальные составляющие, например, ПИД регулятора (пропорциональная и интегральная) имеют минимальный уровень сигнала. Поэтому с точки зрения уменьшения динамического отклонения температуры и сокращения длительности переходного процесса целесообразно максимальное значение производной по отклонению, достигаемое в момент смены знака отклонения температуры, держать постоянным в течение этой четверти периода, что дает возможность вырабатывать максимальное управляющее воздействие, эффективно
тормозящее дальнейший рост отклонения температуры.
При положительном отклонении температуры это достигается максимальной постоянной подачей хладагента через змеевик и минимальной через рубашку - для случая сильноэкзотермических процессов, и максимальной постоянной подачей хладагента через змеевик и минимальной постоянной подачей теплоносителя через рубашку-для слабоэкзотермических или эндотермических процессов с учетом значения производной по отклонению температуры, достигаемой в момент смены знака по отклонению.
При отрицательном отклонении температуры это достигается минимальной постоянной подачей хладагента через змеевик и максимальной через рубашку - для случая сильноэкзотермических процессов, и минимальной постоянной подачей хладагента через змеевик и максимальной постоянной подачей теплоносителя через рубашку-для слабоэкзотермических или эндотермических процессов также с учетом значения производной по отклонению температуры, достигаемой в момент смены знака по отклонению.
Когда регулируемый параметр при своем положительном отклонении начинает возвращаться к заданному значению, что определяется по смене знаков производной по отклонению этого параметра, управляющее воздействие на изменение расхода хладагента через змеевик постоянно уменьшается, а управляющее воздействие на изменение расхода хладагента через рубашку постепенно увеличивается в соответствии, например, с законом пропорционально-интегрального регулятора.
Когда регулируемый параметр при отрицательном отклонении начинает возвращаться к заданному значению, что определяется по смене знаков производной по отклонению, управляющее воздействие на изменение расхода хладагента постепенно увеличивается, а управляющее воздействие на изменение расхода хладагента через рубашку постепенно уменьшается в соответствии с законом пропорционально-интегрального регулятора.
При управлении температурным режимом слабоэкзотермических процессов на этих стадиях в случае положительного отклонения температуры будет постепенно уменьшаться расход хладагента через змеевик и возрастать расход теплоносителя через рубашку, а в случае отрицательного отклонения температуры начнет постепенно увеличиваться расход хладагента через
змеевик и уменьшаться расход теплоносителя через рубашку.
Таким образом, когда регулируемый параметр начинает возвращаться к заданному
значению, управляющее воздействие по- прежнему имеет отрицательное (тормозящее) значение, но по мере устранения рассогласования оно соответствующим образом уменьшается, что в итоге позволяет
0 избежать чрезмерного перерегулирования в следующий полупериод колебания.
Обеспечению повышенной динамической точности стабилизации температурного режима способствует и тот фактор, что
5 нет дискретных (релейных) переходов в выработке управляющих воздействий по изменению расходов хладагента через змеевик и рубашку или хладагента только через змеевик и теплоносителя только через рубашку
0 (происходит как бы безударное переключение при переходе системы управления с работы одного регулирующего контура на другой), хотя устройство и сочетает в себе свойства двух разных по классу систем: не5 линейной, когда параметр удаляется от задания, и линейной, когда он приближается к заданию.
Изобретение позволяет повысить точность регулирования температуры реакци0 онной массы в РПД и РПНД как обьекгов с переменными параметрами, за счет создания скользящих или квазискользящих режимов в системе, инвариантных к параметрическим возмущениям.
5 На фиг. 1 приведена функциональная схема способа регулирования температуры в реакторе для сильноэкзотермических процессов; на фиг, 2 - функциональная схема способа регулирования температуры в реак0 торе для слабоэкзотермических процессов; на фиг. 3 - графики переходных процессов, имеющих место в работе системы; на фиг. 4 - структурная схема устройства для реализации способа; на фиг. 5 - структурная схе5 ма устройства для оценки соотношения знаков по отклонению.
Для осуществления способ используются (фиг. 1) реактор 1, который снабжен змеевиком 2, рубашкой 3, мешалкой 4,
0 клапаном 5 выгрузки, вытяжной системой 6, патрубками 7 подачи исходных компонентов в реактор, переточным патрубком 8, патрубками подачи 9 хладагента в змеевик и рубашку и выхода 10 хладагента из теплооб5 менных систем с установкой на линии змеевика клапана обратного принципа действия 11 (НО), а на линии рубашки - прямого принципа действия 12 (НЗ).
Реактор заполнен реакционной массой до уровня 13 (до перетока). Для контроля
температуры реакционной массы в реакторе предназначены датчик 14 и вторичный измерительный прибор 15, снабженный нормирующим преобразователем, выход с которого связан с блоком 16 управления. Выходной сигнал с блока 16 управления соединен с приводами регулирующих клапанов 11 и 12. На фиг. 2 (обозначения те же, что и на фиг.1) клапан 11 обратного принципа действия (НО) установлен на линии 9 подачи хладагента через змеевик, а прямого принципа действия 12 (НЗ) - на линии 17 подачи теплоносителя через рубашку. Выход теплоносителя из рубашки осуществляется через сливной патрубок 18.
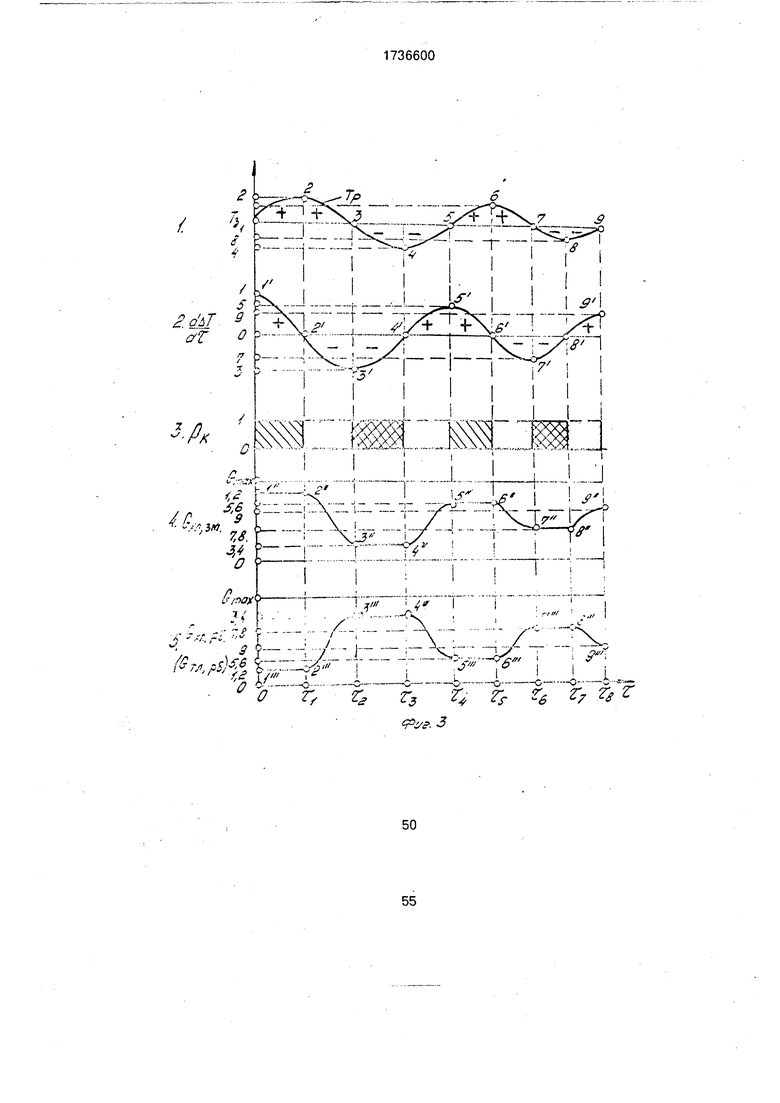
На фиг. 3 показана динамика изменения технологических параметров, командных сигналов и управляющих воздействий в переходном режиме: 1 - Тр, температуры реакционной массы; 2 - d AT/dT, производной по отклонению температуры от заданного значения; 3 - командного сигнала Рк для переключения управляющего сигнала на приводы регулирующих клапанов при совпадении знаков отклонения температуры и производной по отклонению; 4 - расход хладагента Схз через змеевик; 5 - расхода хладагента GXp или теплоносителя GT через рубашку; Oi+ и-м () - четверть периода колебательного процесса изменений отклонения температуры и производной по этому отклонению относительно заданного значения температуры, а также командного сигнала и расходов энергоносителей через теплообменник реактора.
Цифры на ординатах и буквы с цифровыми индексами на оси абсцисс обозначают:
на графике 1:1.1; 1,3,5,7,9-отсутствие отклонения температуры;
1.2; 2, 4, 6, 8 - максимальные отклонения температуры;
на графике 2: 2.1; 1, 3, 5, 7, 9 - максимумы производной по отклонениям температуры;
2.2; 2, 4, 6, 8 - нулевые значения производной по отклонениям.
На графике 4 для змеевика:
4.1.Г-2(0- п); ( Т4-т s) - максимальные постоянные расходы хладагента при увеличении положительных отклонений температуры;
4.2.( Т2- тз); ( те- г) - минимальные постоянные расходы хладагента при увеличении отрицательных отклонений температуры;
4.3.( Т1- Г2); ( Т5- те) - снижение расходов хладагента при уменьшении положительных отклонений температуры;
4.4. (тз-т4); (г7-rв)-увеличение расходов хладагента при уменьшении отрицательных отклонений температуры.
На графике 5 для рубашки: 5.1. 1 и-2(0- т V); ( т г г б) - минимальные постоянные расходы хладагента (теплоносителя) при увеличении положительных отклонений температуры;
5.2.( т 2-т з); ( т 6- г ) - макси- мальные постоянные расходы хладагента (теплоносителя) при увеличении отрицательных отклонений температуры.
5.3. ( 2); ( т 5-т е) - увеличение расходов хладагента (теплоносителя) при уменьшении положительных отклонений температуры;
5.4.(тз-г4 8 -9(Т7-Т8)-снижение расходов хладагента (теплоносителя) при уменьшении отрицательных отклоне- ний температуры.
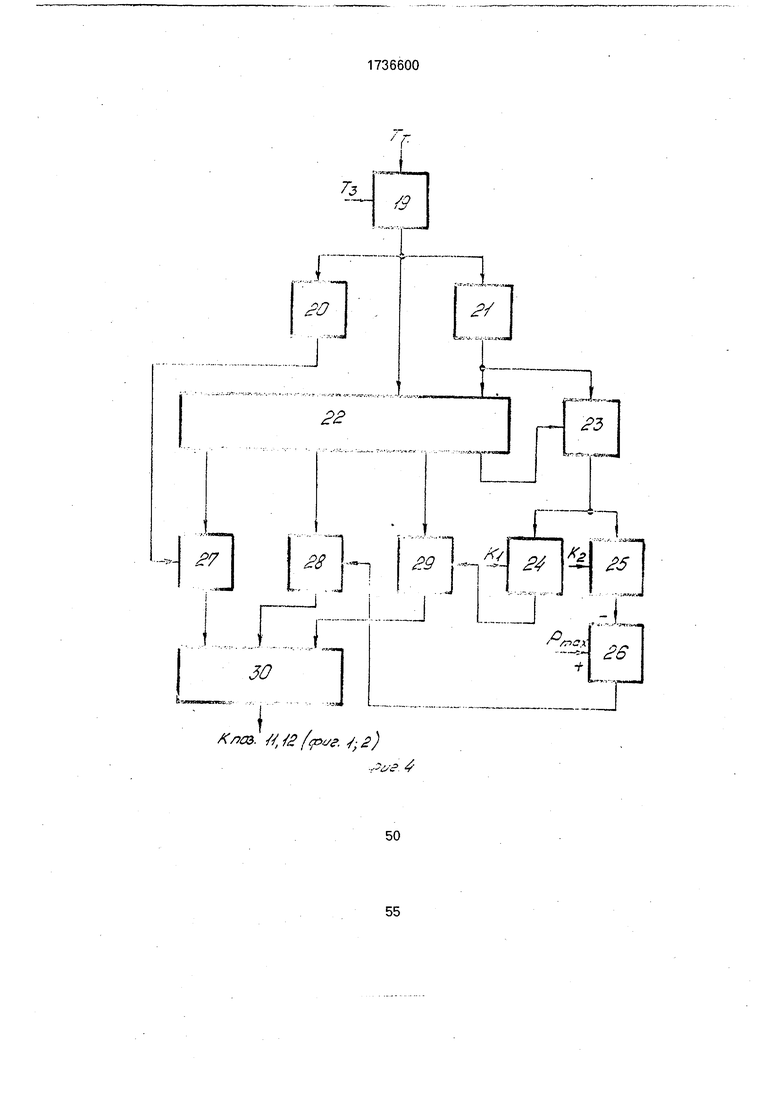
На фиг. 4 представлено устройство блока 16 управления (фиг. 1 и 2) для практической реализации способа управления по
оценке соотношения знаков отклонения температуры от задания и производной этого отклонения с двумя управляющими воздействиями и переменной структурой регулятора, основанной на использовании в
зависимости от соотношения знаков отклонения и производной отклонения либо максимума входного сигнала по D-составляющей отклонения температуры, достигаемой в момент смены знака отклонения, либо алгоритма функционирования ПИ-регулятора для выработки соответствующих управляющих сигналов при приближении параметра к заданию.
Структурная схема блока 16 управления
состоит из первого сумматора 19, ПИ-регулятора 20, дифференцирующего блока 21, логического блока 22 оценки знаков отклонения и производной этого отклонения, управляемого логического элемента (УЛЭ)
ПАМЯТЬ 23, запоминающего максимальное значение производной отклонения температуры от задания при наличии на его управляющем входе сигнала, вырабатываемого логическим элементом отрицания НЕ 35, первого элемента 24 умножения на постоянный коэффициент Кт при положительной производной отклонения температуры от задания, реализующего
функцию К1 (-д-)макс , второго элемента
25 умножения на постоянный коэффициент К2 при отрицательной производной отклонения от задания, второго сумматора 26, реализующего функцию:
Р /dA1
гмакс+ К.2 ч rtr ,
где Рмакс - максимальное значение нормирующего сигнала, трех логических элементов ЗАПРЕТ 27-29 и элемента логического сложения ИЛИ 30.
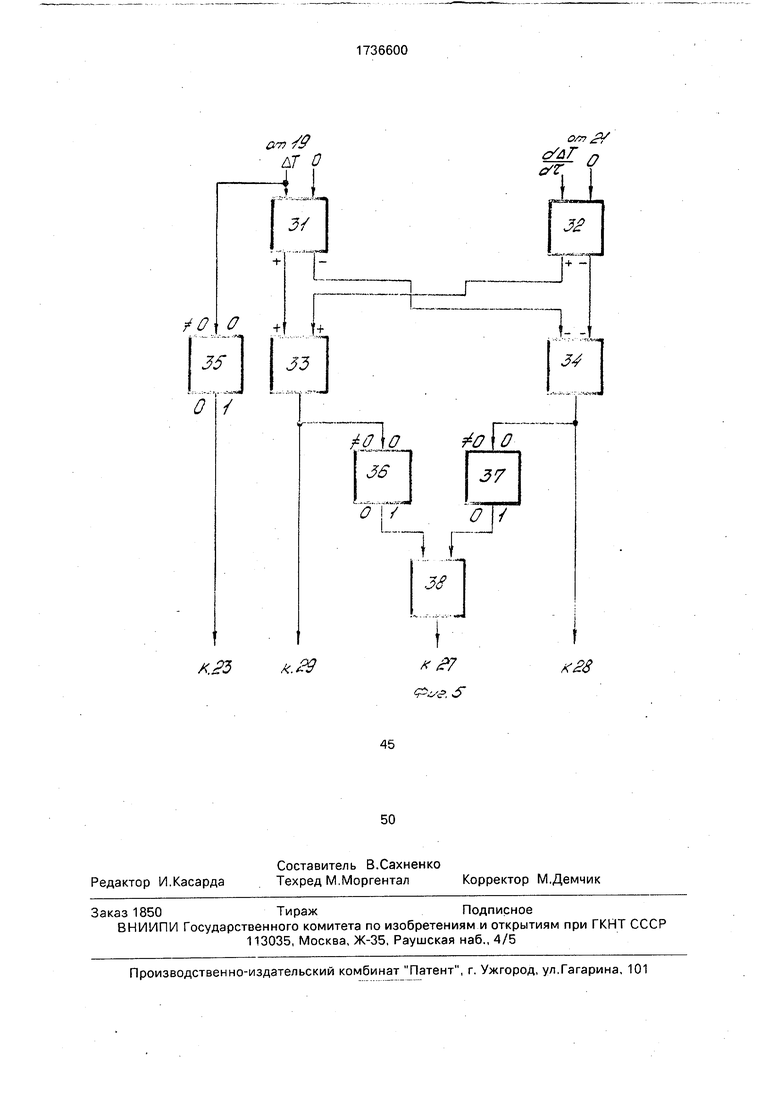
На фиг. 5 изображена структурная схема логического блока 22 оценки знаков отклонения и производной этого отклонения (фиг. 4), состоящего из двух сумматоров 32 и 31, трех элементов логического умножения И 33,34,38 и трех элементов логического отрицания НЕ 35-37. Последние указанные элементы функционируют таким образом, что при наличии на их входах ненулевого сигнала (Ј0) на их выходах сигнал отсутствует (0), и наоборот - сигнал на выходе (1) при отсутствии входного сигнала (0). На одном из двух входов блоков 31 и 32 суммирования подается опорный сигнал О, определяющий условный нулевой уровень по данному параметру. Логический блок 22 реализует выработку управляющих воздействий на изменение расходов хладагента через змеевик и рубашку (или только хладагента через змеевик, а теплоносителя через рубашку) по оценке соотношения знаков по отклонению и производной по отклонению согласно следующему алгоритму:
1.При ДТ-
GX3 const, макс Gxp(Grp)const, мин
2.ПриДТ ОиДТ-- р 0
(ДТ) - мин Gxp(Grp)f (ДТ) - макс
3.При
Gx3 const, мин GXp(Grp)const, макс
4.При
Gxa f (ДТ) - макс GXp(GrpH (AT)- мин.
Способ регулирования температуры реакционной массы в реакторе смешения осуществляется следующим образом.
Когда происходит увеличение положительного отклонения температуры (временные интервалы: 0- т ТА - т% , фиг. 3), то значение производной этого отклонения, достигаемое в момент смены знака отклонения, фиксируемого по команде с элемента 35 (фиг. 5),и запоминаемое блоком ПАМЯТЬ 23 до момента сохранения равенства знаков отклонения и производной по отклонению, фиксируется на логическом элементе 33 сбрасываемого сигнала с элемента ПАМЯТЬ 23 по команде с элемента И 38 элементу НЕ 35.
Управляющее воздействие, пропорциональное значению максимальной положительной производной по отклонению, воздействует на приводы регулирующих клапанов 11 и 12 таким образом, что клапан
11 на линии змеевика будет открыт на соответствующее значение, а клапан 12 на линии рубашки будет прикрыт на то же значение.
Когда температура в реакторе начнет
приближаться к заданию (временные интервалы: г 1 -Г2 ;т 5-7б)и соотношение знаков по отклонению и производной по отклонению станет отрицательным, то логический
блок 22 выдаст команду логическому элементу ЗАПРЕТ 27 на прохождение сигнала от ПИ-регулятора 20 через логический элемент ИЛИ 30 на приводы регулирующих клапанов 11 и 12. При этом будет соответствующим образом уменьшаться расход хладагента через змеевик и возрастать его расход или теплоносителя через рубашку, т.е. управляющее воздействие направлено как бы на предотвращение тенденции понижения температуры. Это сокращает длительность временных
интервалов г ч - г 2 , т s - 7 е и препятствует значительному выбегу температуры при ее дальнейшем, но уже отрицательном отклонении на последующих временных интервалах Г2 - Тз И Гб - Т7.
Если отклонения температуры и ее производной становятся отрицательными (временные интервалы тг - тз и те - г), то по команде с логического блока 22 на логический элемент ЗАПРЕТ 28 поступает разрешающий сигнал на прохождение с алгебраического блока 26 вычитания через логический элемент ИЛИ 30 управляющего сигнала на приводы регулирующих клапанов 11 и 12. Текущее значение сигнала определяется на дифференцирующем блоке 21 при смене знака по отклонению температуры и держится постоянным в течение данного периода с помощью логического элемента ПАМЯТЬ 23 до тех пор, пока не
происходит смена знака производной по отклонению.
На умножителе 25 получают произведение К2- (-рпг-)макс Значение коэффициента
К2 выбирается из условий: Кч К2 :Ј Ki; в частном случае . При асимметричности динамики объекта, когда величина отклонения регулируемой величины определяется и знаком отклонения, указанный коэффициент выбирается из условия: . В сумматоре 26 получают величину управляющего сигнала при отрицательных значениях отклонения и производной по отклонению, поступающего на приводы регулирующих клапанов 11 и 12. В соответствии с этим расход хладагента или теплоносителя через рубашку принимает максимальное и постоянное значение, а расход хладагента через змеевик - минимальное и также постоянное значение.
Когда отрицательное значение производной по отклонению сменяется на положительное, то по команде с логического блока 22 логическому элементу ЗАПРЕТ 27 управляющий сигнал с ПИ-регулятора 20 через логический элемент ИЛИ 27 поступает на приводы регулирующих клапанов 11 и 12, постепенно увеличивая расход хладагента через змеевик и уменьшая его расход (или расход теплоносителя) через рубашку (временные интервалы: ТА - TS и TI - rs). Далее цикл работы регулятора температуры повторяется.
В особенности эффективно использование данного способа для регулирования температуры в РПД и РПНД, отличающихся нестационарностью своих динамических характеристик, когда адаптационные свойства, присущие данному способу, позволяют свести к минимуму динамическую ошибку регулирования.
Использование способа управления температурным режимом в реакторе с мешалкой дает возможность повысить точ0
ность регулирования до ± 0,25-0,5° Сив 2-3 раза сократить длительность переходного процесса, что может найти широкое применение в автоматизации процессов нитрования влакокрасочной промышленности при реализации их в каскаде реакторов смешения непрерывного действия с интенсивным перемешиванием.
Формула изобретения
Способ автоматического управления температурным режимом технологического процесса в реакторе смешения, включающий
регулирование соотношения расходов хладагента, подаваемого в рубашку и змеевик, в зависимости от величины и знака отклонения текущей температуры реакционной массы от заданной, отличающийся тем, что, с
целью снижения энергозатрат за счет повышения точности регулирования температуры реакционной массы, дополнительно определяют величину и знак производной по отклонению температуры реакционной
массы, при положительном знаке отклонения и отрицательном знаке производной по отклонению расход хладагента в змеевик уменьшают, а в рубашку увеличивают, при отрицательном знаке отклонения и положительном знаке производной по отклонению расход хладагента в змеевик увеличивают, а в рубашку - уменьшают, при одинаковых знаках отклонения и производной по отклонению расходы хладагента в змеевик-и рубашку не изменяют.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294556C1 |
| Устройство автоматического управления экзотермическим процессом в реакторе полунепрерывного действия | 1990 |
|
SU1804903A1 |
| Устройство автоматического управления экзотермическим процессом | 1987 |
|
SU1511737A1 |
| Способ управления экзотермическим процессом | 1977 |
|
SU735293A1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1672420A1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1675863A1 |
| Устройство для управления реактором полунепрерывного действия | 1984 |
|
SU1230667A1 |
| Устройство для автоматического управления процессом нитрования в установке полунепрерывного действия | 1988 |
|
SU1634659A1 |
| Способ управления экзотермическим процессом | 1978 |
|
SU764716A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРИГОТОВЛЕНИЯ РАСТВОРОВ В РЕАКТОРАХ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2071961C1 |

Изобретение относится к управлению экзотермическими, слабоэкзотермическими и эндотермическими процессами в реакторах периодического, полунепрерывного и непрерывного действия, снабженных рубашкой (с малым значением коэффициента теплопередачи) и змеевиком (с большим значением коэффициента теплопередачи), и может найти применение в химико-фармацевтической, лакокрасочной промышленности. Целью изобретения является снижение энергозатрат за счет повышения точности регулирования температуры реакционной массы. Сущность изобретения состоит в использовании различий коэффициентов теплопередачи через змеевик и рубашку, энергосодержаний хладагента, подаваемого через змеевик, и теплоносителя, поступающего через рубашку, знаков отклонения температуры и производной по отклонению. При равенстве знаков отклонения и производной по отклонению управляющее воздействие по управлению энергетическими потоками формируется по значению производной, достигаемой в момент смены знака по отклонению, и держится постоянным в течение длительности этого периода. При различии знаков отклонения и производной по отклонению управляющее воздействие формируется с учетом алгоритма пропорционально-интегрального регулятора.5 ил. СО с :х| ;оо Os о о о
Фиг. 2
ч
о
о
СО СО СО
г
о
Чъ K
IL,
Ъ СМ
8
С
о ю
ю ю
N
s
.
.. - i
Ј -, i 4V%
, i- (, «
;
г
т
.
7s
20
J
22
27
28
ri
Л7
. #,J2 fept/г. S}2)
.г 4
50
&
1
4v- X
/
«.«тгчч- -.г -,
3
.tr JTOCMW
H
j
A
n
, .,
1
&
J ,1
/ /TJtf
| Устройство для регулирования температуры в химическом реакторе | 1983 |
|
SU1119724A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство автоматического управления экзотермическим процессом | 1987 |
|
SU1511737A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
