Изобретение относится к области управления объектами с нестационарной динамикой при наличии контролируемых возмущающих воздействий и касается, в частности, вопросов стабилизации температурного режима экзотермических процессов при проведении их в реакторах полунепрерывного действия (РПНД). которое может найти широкое применение в химико-фармацевтической и лакокрасочной
промышленности для производства лекарственных препаратов, витаминов, лаков и красителей. Цель изобретения - повышение производительности РПНД за счет увеличения точности стабилизации температурного режима в реакторе, сокращение длительности дозировки и возрастание выхода целевого продукта.
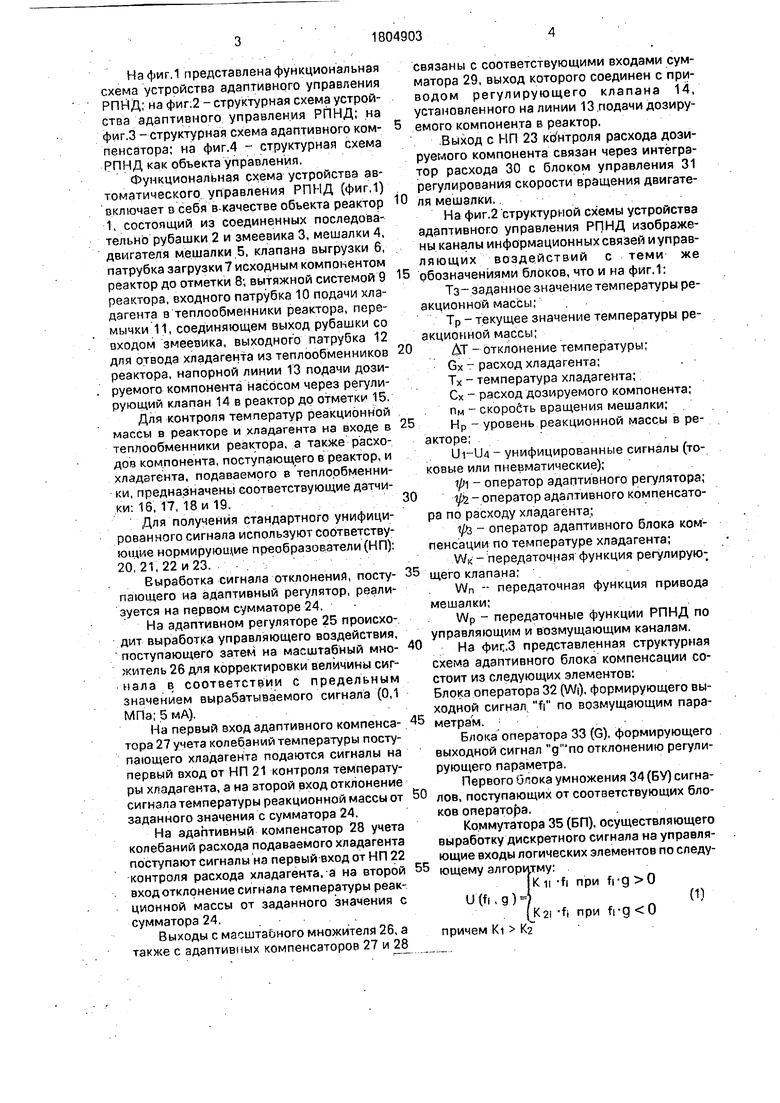
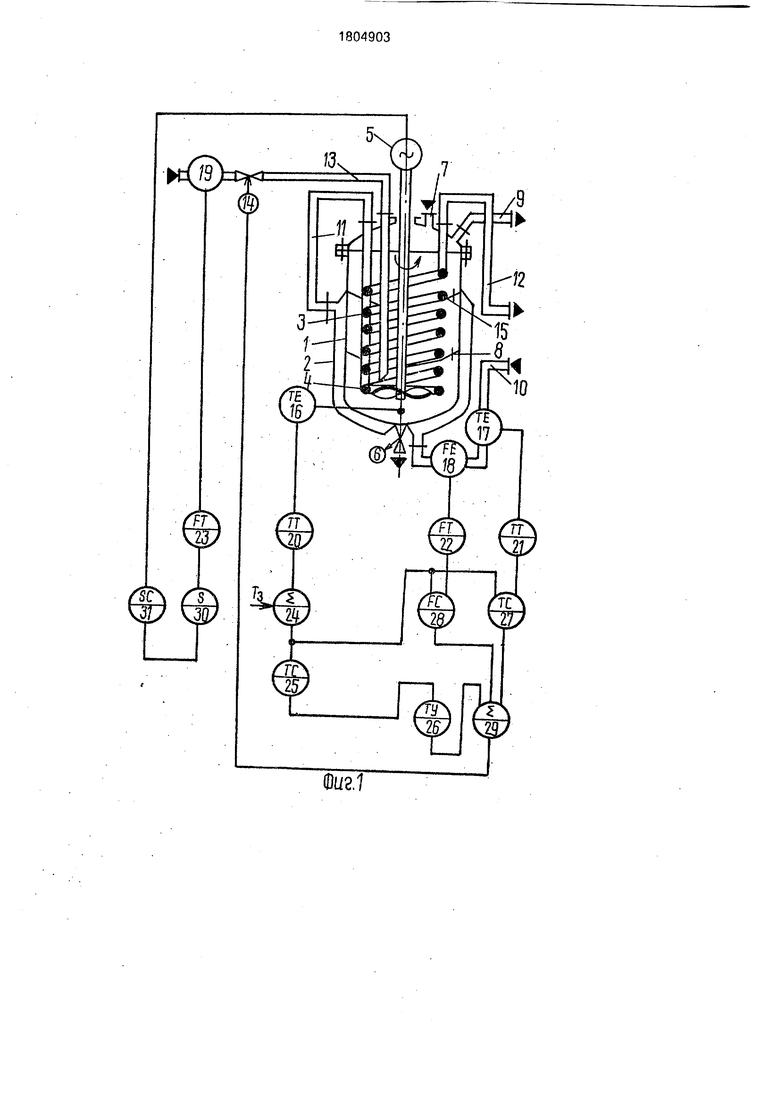
На фиг.1 представлена функциональная схема устройства адаптивного управления РПНД; на фиг;2 - структурная схема устройства адаптивного управления РПНД; на фиг.З - структурная схема адаптивного компенсатора; на фиг.4 - структурная схема РПНД как объекта управления.
Функциональная схема устройства автоматического управления РПНД (фиг.1) включает в себя в-качестве объекта реактор 1, состоящий из соединенных последовательно рубашки 2 и змеевика 3, мешалки 4, двигателя мешалки 5, клапана выгрузки б, патрубка загрузки исходным компонентом реактор до отметки 8; вытяжной системой 9 реактора, входного патрубка 10 подачи хладагента в теплообменники реактора, перемычки 11, соединяющем выход рубашки со входом змеевика, выходного патрубка 12 для отвода хладагента из теплообменников реактора, напорной линии 13 подачи дозируемого компонента насосом через регулирующий клапан 14 в реактор до отметки 15, Для контроля температур реакционной массы в реакторе и хладагента на входе в теплообменники реактора, а также расходов компонента, поступающего в реактор, и хладагента, подаваемого в теплообменники, предназначены соответствующие датчики: 16, 17, 18 и 19.
Для получения стандартного унифицированного сигнала используют соответствующие нормирующие преобразователи (НП): 20, 21, 22 и 23.
Выработка сигнала отклонения, поступающего на адаптивный регулятор, реализуется на первом сумматоре 24.
На адаптивном регуляторе 25 происходит выработка управляющего воздействия, поступающего затем на масштабный множитель 26 для корректировки величины сиг- нала в соответствии с предельным значением вырабатываемого сигнала (0,1 МПэ; 5 мА).
На первый вход адаптивного компенсатора 27 учета колебаний температуры поступающего хладагента подаются сигналы на первый вход от НП 21 контроля температуры хладагента, а на зторой вход отклонение сигнала температуры реакционной массы от заданного значения с сумматора 24.
На адаптивный компенсатор 28 учета колебаний расхода подаваемого хладагента поступают сигналы на первый вход от НП 22 контроля расхода хладагента, а на второй вход отклонение сигнала температуры реакционной массы от заданного значения с сумматора 24..
Выходы с масштабного множителя 26, а также с адаптивных компенсаторов 27 и 28
и
10
15
20
25
30
35
40
45
50
55
связаны с соответствующими входами сумматора 29, выход которого соединен с приводом регулирующего клапана 14, установленного на линии 13 лодачи дозируемого компонента в реактор.
.Выход с НП 23 контроля расхода дозируемого компонента связан через интегратор расхода 30 с блоком управления 31 регулирования скорости вращения двигателя мешалки..
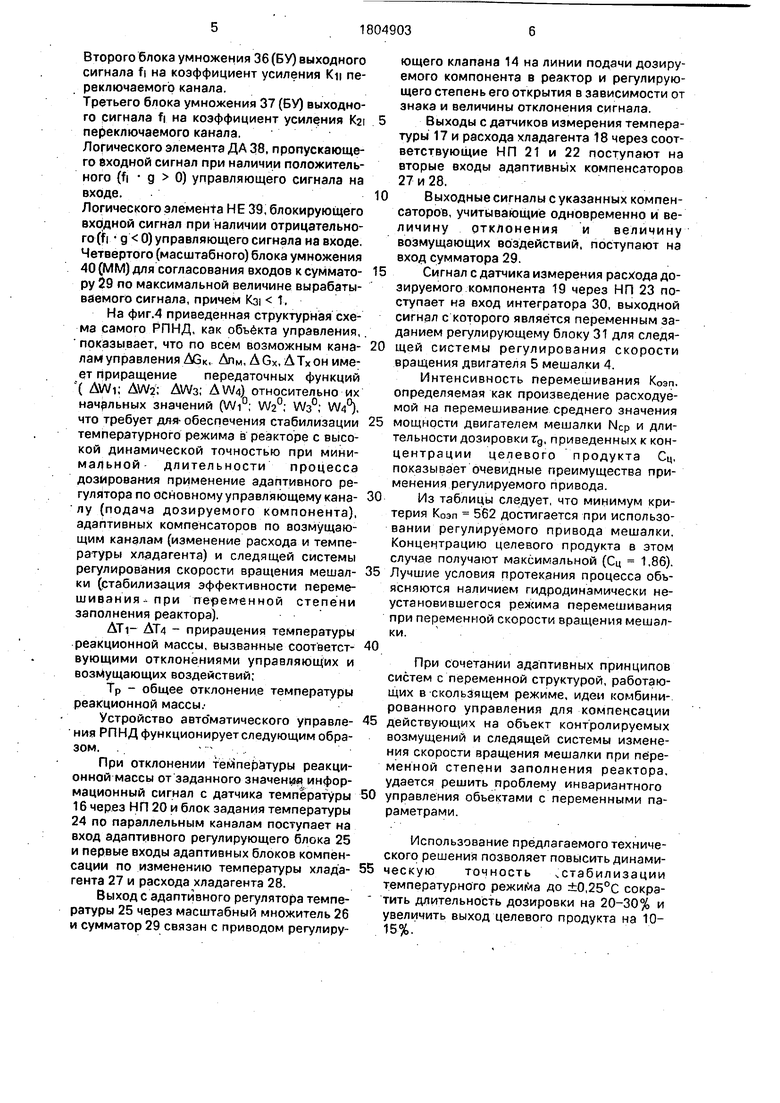
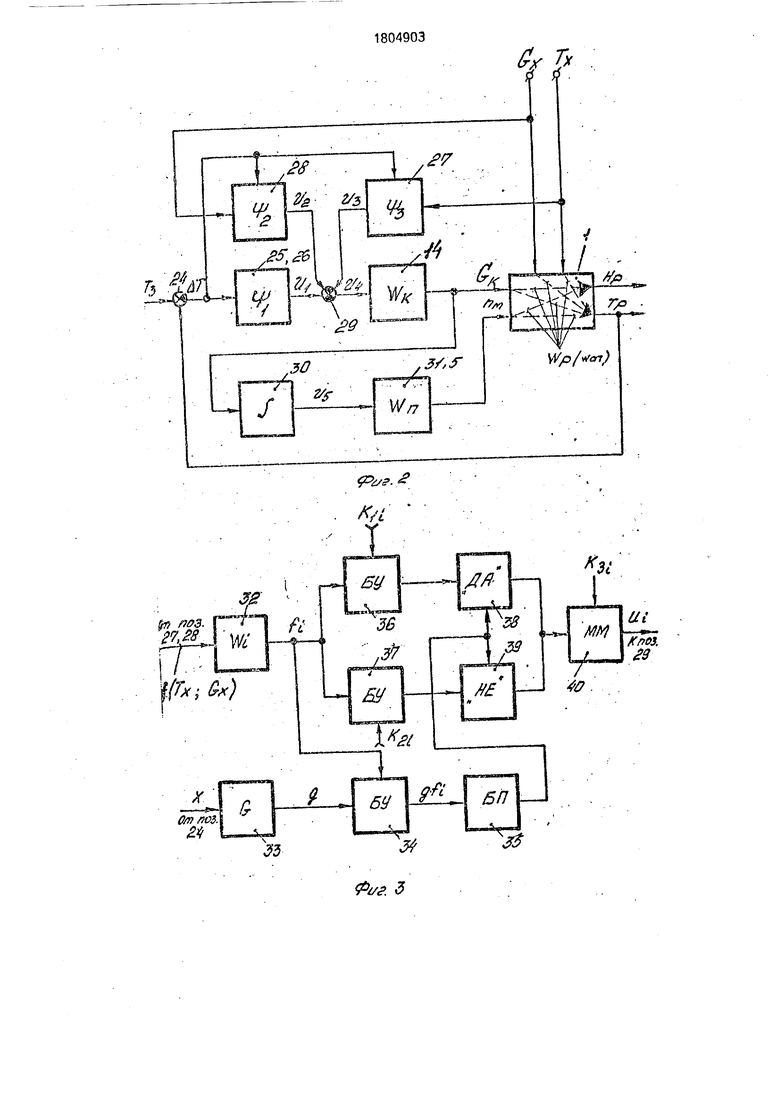
На фиг.2 структурной схемы устройства адаптивного управления РПНД изображены каналы информационных связей иуправ- ляющих воздействий с теми же обозначениями блоков, что и на фиг.1:
Тз заданное значение температуры реакционной массы;
Тр - текущее значение температуры реакционной массы;
AT-отклонение температуры;
Gx - расход хладагента;
Тх - температура хладагента;
Сх - расход дозируемого компонента;
пм скоробть вращения мешалки;
Нр - уровень реакционной массы в реакторе;
U 1-1)4 - унифицированные сигналы (токовые или пневматические);
- оператор адаптивного регулятора;
tjfe - оператор адаптивного компенсатора по расходу хладагента;
i/S - оператор адаптивного блока компенсации по температуре хладагента;
WK - передаточная функция регулирую-, щего клапана;
Wn - передаточная функция привода мешалки;
Wp - передаточные функции РПНД по управляющим и возмущающим каналам.
На фип.З представленная структурная схема адаптивного блока компенсации состоит из следующих элементов: Блока оператора 32 (Wi), формирующего выходной сигнал, fi по возмущающим параметрам. :.
Блока оператора 33 (G), формирующего выходной сигнал отклонению регулирующего параметра.
Первого йпока умножения 34 (БУ) сигналов, поступающих от соответствующих блоков оператора.
Коммутатора 35 (БП), осуществляющего выработку дискретного сигнала на управляющие входы логических элементов по следующему алгор /тму:
К 11 -fi при
U(f.,g) причем Ki К
Kai -fi при fi-g 0
(1)
Второго блока умножения 36 (БУ) выходного сигнала fi на коэффициент усиления Кц переключаемого канала. Третьего блока умножения 37 (БУ) выходного сигнала fi на коэффициент усиле.ния Kai переключаемого канала. Логического элемента ДА 38, пропускающего входной сигнал при наличии положительного {fi g 0) управляющего сигнала на входе.
Логического элемент а НЕ 39, блокирующего входной сигнал при наличии отрицательного (TI g 0) управляющего сигнала на входе. Четвертого (масштабного) блока умножения 40 (ММ) для согласования входов к сумматору 29 по максимальной величине вырабатываемого сигнала, причем KOI 1.
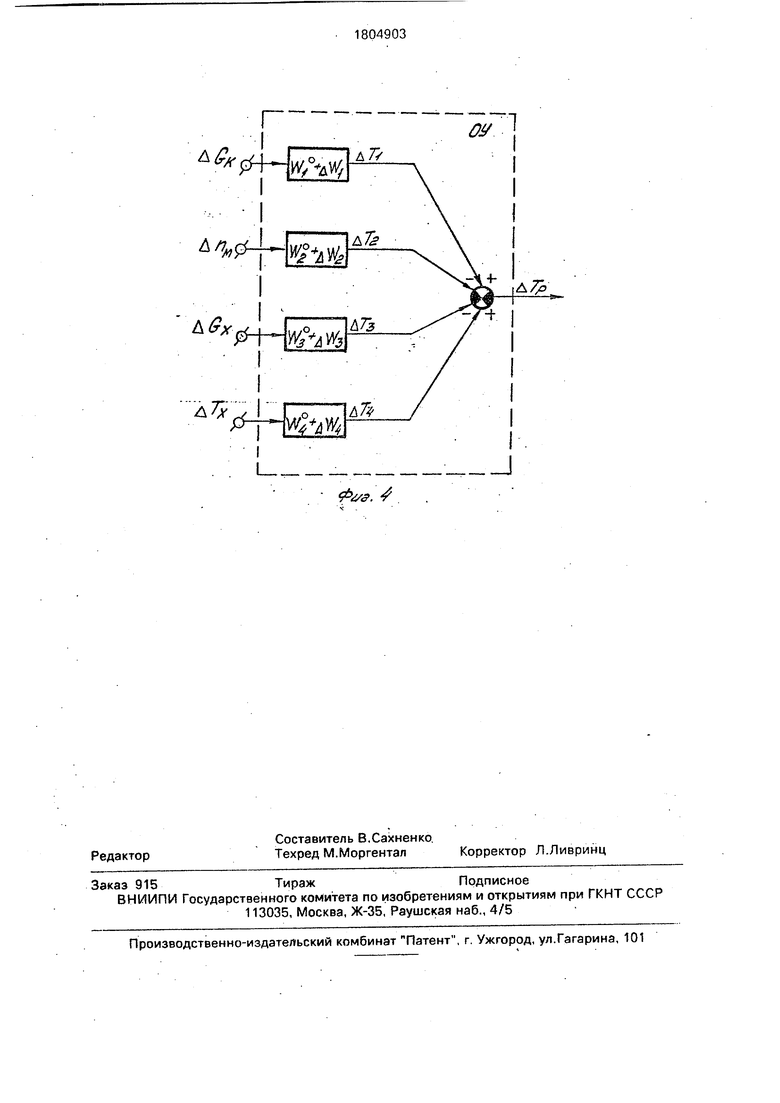
На фиг.4 приведенная структурная схема самого РПНД, как объекта управления, показывает, что по всем возможным каналам управления AGK, Алм, A Gx, А Тх он име ет приращение передаточных функций ( AWi; AWa; AW4) относительно их начальных значений (Wi°; Wa0; W3°; Л/Д что требует для- обеспечения стабилизации температурного режима в реакторе с высокой динамической точностью при минимальной длительности процесса дозированмя применение адаптивного регулятора по основному управляющему кана- лу (подача дозируемого компонента), адаптивных компенсаторов по возмущающим каналам (изменение расхода и температуры хладагента) и следящей системы регулирования скорости вращения мешалки (стабилизация эффективности перемешивания- при переменной степени заполнения реактора).
ATi- AT4 - приращения температуры реакционной массы, вызванные соответствующими отклонениями управляющих и возмущающих воздействий;
Тр - общее отклонение температуры реакционной массы/
Устройство автоматического управления РПНД функционирует следующим образом. .- ,
При отклонении температуры реакционной массы от заданного значения информационный сигнал с датчика температуры 16 через НП 20 и блок задания температуры 24 по параллельным каналам поступает на вход адаптивного регулирующего блока 25 и первые входы адаптивных блоков компенсации по изменению температуры хладагента 27 и расхода хладагента 28.
Выход с адаптивного регулятора температуры 25 через масштабный множитель 26 и сумматор 29 связан с приводом регулирующего клапана 14 на линии подачи дозируемого компонента в реактор и регулирующего степень его открытия в зависимости от знака и величины отклонения сигнала. 5Выходы с датчиков измерения температуры 17 и расхода хладагента 18 через соответствующие НП 21 и 22 поступают на вторые входы адаптивных компенсаторов 27 и 28.
0 Выходные сигналы с указанных компенсаторов, учитывающие одновременно и величину отклонения и величину возмущающих воздействий, поступают на вход сумматора 29.
5 Сигнал с датчика измерения расхода дозируемого компонента 19 через НП 23 поступает на вход интегратора 30, выходной сигнал с которого является переменным заданием регулирующему блоку 31 для следя0 щей системы регулирования скорости вращения двигателя 5 мешалки 4.
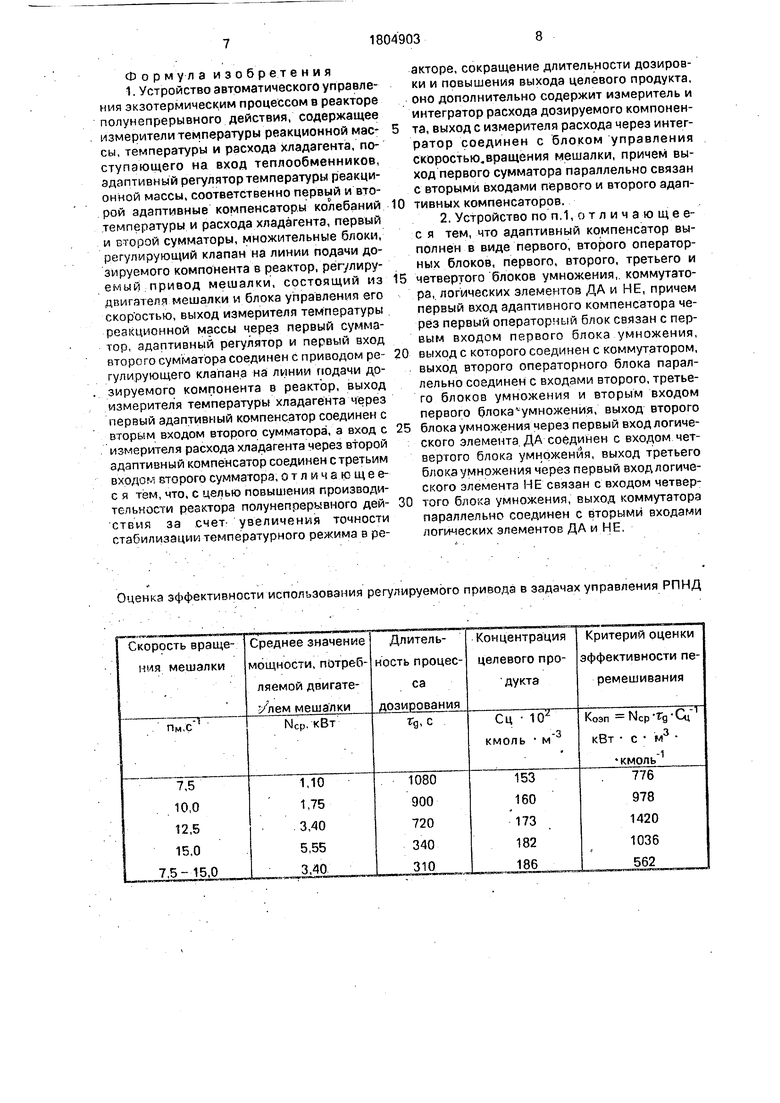
Интенсивность перемешивания К0эп. определяемая как произведение расходуемой на перемешивание среднего значения
5 мощности двигателем мешалки NCp и длительности дозировки rg, приведенных к кон- центрации целевого продукта Сц, показывает очевидные преимущества применения регулируемого привода.
0 Из таблицы следует, что минимум критерия Коэп 562 достигается при использовании регулируемого привода мешалки. Концентрацию целевого продукта в этом случае получают максимальной (Сц 1,86).
5 Лучшие условия протекания процесса объясняются наличием гидродинамически неустановившегося режима перемешивания при переменной скорости вращения мешалки.
0
При сочетании адаптивных принципов систем с переменной структурой, работающих в-скользящем режиме, идеи комбини-. рованного управления для компенсации
5 действующих на объект контролируемых возмущений и следящей системы изменения скорости вращения мешалки при переменной степени заполнения реактора, удается решить проблему инвариантного
0 управления объектами с переменными параметрами.
Использование предлагаемого технического решения позволяет повысить динами- 5 ческую точность ..стабилизации температурного режима до ±0,25°С сокра- - тить длительность дозировки на 20-30% и увеличить выход целевого продукта на 10- 15%.
Форм у л а и з о б р е т е н и я 1. Устройство автоматического управления экзотермическим процессом в реакторе полунепрерывного действия, содержащее измерители температуры реакционной мае- сы, температуры и расхода хладагента, поступающего на вход теплообменников, адаптивный регулятор температуры реакционной массы, соответственно первый и второй адаптивные компенсаторы колебаний температуры и расхода хладагента, первый и второй сумматоры, множительные блоки, регулирующий клапан на линии подачи дозируемого компонента в реактор, регулируемый привод мешалки, состоящий из двигателя мешалки и блока управления его скоростью, выход измерителя температуры реакционной массы через первый сумматор, адаптивный регулятор и первый вход второго сумматора соединен с приводом ре- гулирующего клапана на линии подачи дозируемого компонента в реактор, выход измерителя температуры хладагента через первый адаптивный компенсатор соединен с вторым входом второго сумматора, а вход с измерителя расхода хладагента через второй адаптивный компенсатор соединен с третьим входом второго сумматора, отличающее- с я тем, что, с целью повышения производительности реактора полунепрерывного дей- ствия за счет- увеличения точности стабилизации температурного режима в реакторе, сокращение длительности дозировки и повышения выхода целевого продукта, оно дополнительно содержит измеритель и интегратор расхода дозируемого компонента, выход с измерителя расхода через интегратор соединен с блоком управления скоростью.вращения мешалки, причем выход первого сумматора параллельно связан с вторыми входами первого и второго адаптивных компенсаторов.
2. Устройство по п.1, отличаю ще е- с я тем, что адаптивный компенсатор выполнен в виде первого, второго операторных блоков, первого, второго, третьего и четвертого блоков умножения,, коммутатора,, логических элементов ДА и НЕ, причем первый вход адаптивного компенсатора через первый операторный блок связан с первым входом первого блока умножения, выход с которого соединен с коммутатором, выход второго операторного блока параллельно соединен с входами второго, третьего блоков умножения и вторым входом первого блока умножения, выход второго блока умножения через первый вход логического элемента. ДА соединен с входом четвертого блока умножения, выход третьего блока умножения через первый вход логического элемента НЕ связан с входом четвертого блока умножения, выход коммутатора параллельно соединен с вторыми входами логических элементов ДА и НЕ,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294556C1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1675863A1 |
| Устройство автоматического управления реактором полунепрерывного действия | 1989 |
|
SU1672420A1 |
| Устройство для автоматического управления процессом нитрования | 1988 |
|
SU1606178A1 |
| Способ автоматического управления температурным режимом технологического процесса в реакторе смешения | 1990 |
|
SU1736600A1 |
| Устройство для управления реактором полунепрерывного действия | 1984 |
|
SU1230667A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2299094C2 |
| Устройство автоматического управления экзотермическим процессом | 1987 |
|
SU1511737A1 |
| Устройство для автоматического управления процессом нитрования в установке полунепрерывного действия | 1988 |
|
SU1634659A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
Использование: управления объектами с нестационарной динамикой при воздействии контролируемых возмущений и переменной скорости вращения мешалки, может найти широкое применение в химической, химико-фармацевтической и лакокрасочной промышленности при проведении экзотермических процессов в реакторах полунепре- рывного действия (РПНД). Сущность изобретения: использование адаптивных регулятора и компенсаторов, синтезированных с использованием, принципов переменной структуры, функционирующей в скользящем режиме, с учетом возмущающих воздействий со стороны изменения параметров хладагента (температуры и расхода) с управляющим воздействием на подачу дозируемого компонента в РПНД из общей расходной емкости-хранилища и следящей системы регулирования скорости вращения мешалки в функции от значения интеграла от текущего расхода сдоэировэн- ного компонента к данному моменту времени. 1 з.п. ф-лы, 4 ил., 1 табл. 00 g о о со
.-..
Оценка эффективности использования регулируемого привода в задачах управления РПНД
V
IT)
О 01
vr о со
U.
ЈW. У
.I
| Способ автоматического управления процессом культивирования микроорганизмов | 1980 |
|
SU978114A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Способ автоматического управления полунепрерывными процессами в реакторе | 1973 |
|
SU465215A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Сахненко В.И | |||
| и др | |||
| Вопросы эксплуатационной надежности процесса нитрования метилового эфира хлоргидрина стирола в реакторах полунепрерывного действия, Химико-фармацевтический журнал | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
