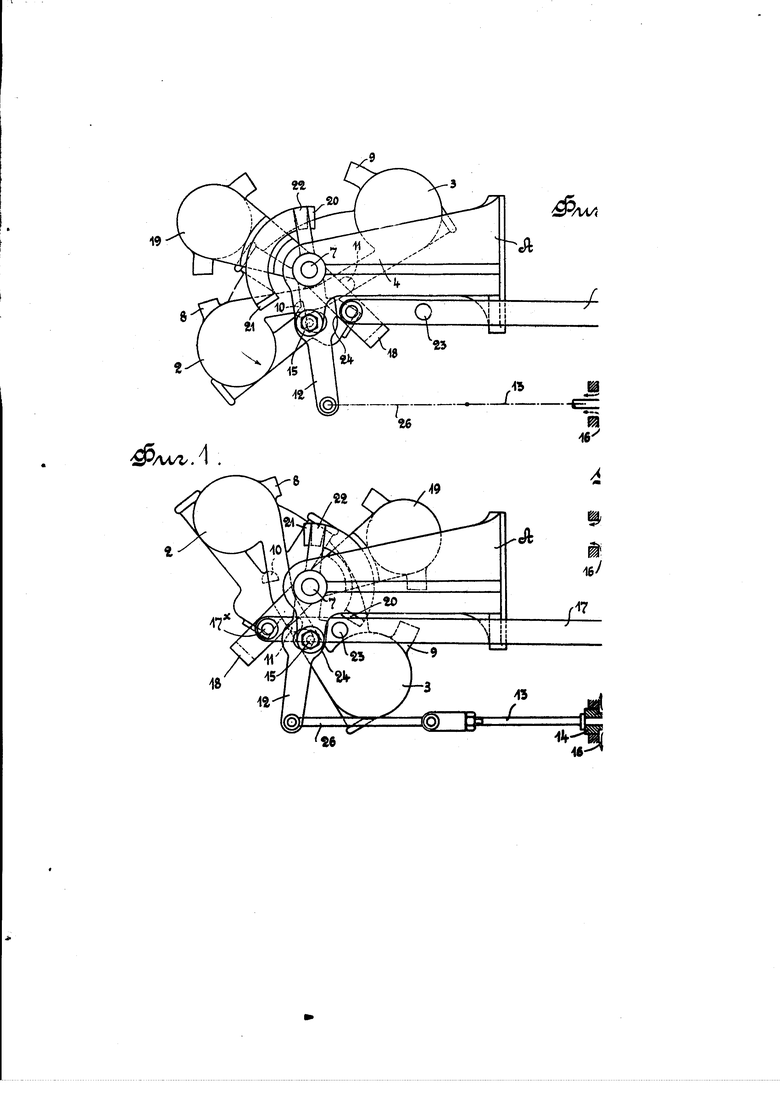
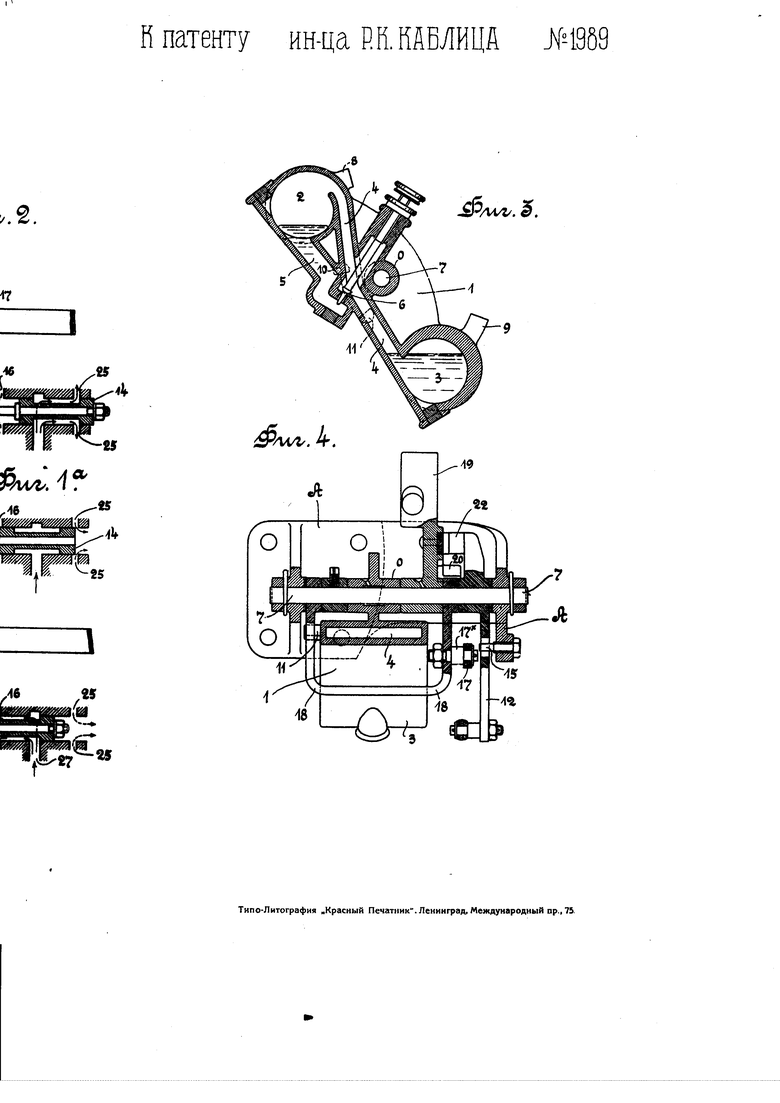
В технике нередко необходимо сообщать известным органам возвратнопоступательные движения такого характера, что за движением вперед следует или немедленно, или через определенно устанавливаемую паузу возвратное движение в исходное положение и остановка в этом исходном или начальном положении более или менее продолжительное время. Таковы, например, условия в механических топках, в которых некоторые (обыкновенно все четные или все нечетные) колосники решетки выдвигаются через известные промежутки времени на короткое время из общей плоскости с целью прюдвижения угля вдоль колосниковой решетки. Предлагаемое изобретение заключается в механизме для сообщения поршню рабочего цилиндра возвратнопоступательного движения с различными по продолжительности и, по желанию, независимр регулируемыми остановками в его крайних положениях, при чем от штока этого поршня движение может быть передано любому другому органу (например, системе подвижных колосников) или непосредственно, или через посредство любого подходящего передаточного механизма. В состав предлагаемого механизма входит система двух сообщающихся сосудов, поворачиваемых совместно около общей оси. Подобные механизмы уже известны, но их конструкция такова, что не дает возможности получить прерывистого возвратно-поступательного движения с различными по продолжительности паузами в обоих крайних положениях. Предлагаемый механизм изображен на фиг. 1 и 2 в боковом виде при двух различных рабочих положениях, причем выполнение таково, что при одном крайнем положении паузы нет; на фиг. 1 изображено среднее положение распределительного золотника рабочего цилиндра, отвечающее положению покоя механизма; на фиг. 3 - разрез коромысла с двумя сосудами на концах, поясняющий расположение соединительных между ними каналов и на фиг. 4 - поперечный разрез механизма через ось вращения коромысла. В подшипниках кронштейна А уложена ось 7 (фиг. 4), на которой сидят свободно: втулка О коромысла 7 с сосудами 2 и 3 на концах, втулка опрокидного груза 79, скобообразный одноплечный рычаг 18 и двуплечный рычаг 72 (фиг. 1-4). Сосуды 2 и 3 сообщаются между- собою при помощи широкого канала 4, идущего от нижней части сосуда 3 в верхнюю часть сосуда 2, и при помощи второго канала 5, сообщающего нижние части этих двух сосудов, при чем в этом канале имеется сравнительно узкое отверстие, запираемое игольчатым клапаном 6, которым можно точно урегулировать пропускное сечение сообразно потребной продолжительности паузы механизма при одном крайнем положении (когда сосуд 3 находится внизу). На коромысле 1 имеются выступы 70 и 11, на которые в известные моменты действует скобо образный рычаг 18, а на сосудах 2 и 3 - возвышение 8 и, соответственно 9, которые при поворотах коромысла подымают опрокидной груз 19 упором в соответствующие выступы и переводят его через положение неустойчивого равновесия. Количество жидкости (например, ртути) в сообщающихся сосудах 2 и 3 таково, что при крайних положениях коромысла, находящийся внизу сосуд почти совершенно заполняется этой жидкостью.
На фиг. 1 предлагаемый механизм, примененный для управления движением поршня парового или гидравлического цилиндра, показан в положении, отвечающем моменту движения этого поршня вправо, которое начнется, как только будет открыт доступ движущей среде через трубу 27 в золотниковую коробку. Золотник 14 занимает, именно, крайнее левое положение, соответствующее впуску движущей среды в левый конец рабочего цилиндра. При этом рычаг 12, связанный с золотником 14 при посредстве штока 13 и шатуна 26, также занимает крайнее левое положение, при котором палец (фиг. 4) 75 кронштейна А прилегает к правому концу удлиненного прореза в этом рычаге. Если открыть кран или клапан питательной трубы 27, то начинающееся движение рабочего поршня вправо вызовет следующий ряд перестановок частей управляющего механизма: стержень 77, связанный с поршнем рабочего цилиндра (или непосредственно, или через подходящую передачу) и за
хватывающий свободным концом цапфу 77 скобообразного одноплечего рычага 18, повернет этот рычаг на оси 7 вправо (в направлении противоположном движению часовой стрелки) и, действуя на выступ 77 коромысла 1, повернет в последнее то же около оси 7 и в том же направлении. В известный момент выступ 9 на- сосуде 3 коснется выступа груза 79 и поднимет последний вверх. Когда этот груз перейдет через свое верхнее положение, являющееся положением неустойчивого равновесия, он начнет падать вниз на противоположной стороне оси
7и, после известного угла падения м накопления достаточной живой силы, захватит своим выступом 20 носик 22 на верхнем конце двуплечего рычага 72 и сообщит последнему быстрый поворот в том же общем направлении и тем быстро же переместит золотник 74 в крайнее правое положение (фиг. 2), отвечающее встрече пальца 75 кронштейна А с другим концом выреза в рычаге 72. При этом положении золотника 74, левый конец рабочего цилиндра оказывается сообщенным с выпуском, а канал 25, ведущий в правый конец цилиндра - со впуском рабочей среды. Вследствие этого, начнется обратное движение рабочего поршня. Жидкость успеет перелиться по широкому каналу 4 из сосуда 3 в сосуд 2 еще до достижения сосудом 3 его наивысшего положения, а потому коромысло 7 установится в положении фиг. 2, как только груз 79 отойдет, вследствие падения влево, от сосуда 3. Таким образом, при начале обратного хода (влево) рабочего поршня части управляющего механизма займут показанное на фиг. 2 относительное положение.
При движении рабочего поршня, а следовательно, и штанги 77 влево, происходит следующий ряд перестановок частей управляющего механизма.
8известный момент рычаг 18, поворачиваемый штангой 77, коснется выступа 70 коромысла 7 и начнет поворачивать последнее в направлении движения часовой стрелки; после известного поворота этого коромысла, выступ 8 сосуда 2 начнет подымать в том же направлении и опрокидной груз 79, при чем выступ 20 на его дуге отойдет от носика 22 двуплечего рычага 72. Вслед за сим палец 23 на штанге 77 упрется в площадку 24 рычага 72 и повернет последний в среднее положение, при котором золотник 14 встанет так, как показано на фиг. 7. Это произойдет в тот момент, когда поршень рабочего цилиндра достигает крайнего левого положения. Так как оба конца цилиндра при указанном положении золотника сообщены с выпуском, то поршень цилиндра остановится в этом крайнем положении в покое вплоть до наступления нижеследующих перестановок, обусловливаемых процессом перетекания жидкости из сосуда 2 в сосуд 3 через узкий канал, регулируемый клапанчиком 6 (фит. 3). В тот момент, когда поршень рабочего цилиндра достиг крайнего левого положения и установил рычаг /2 в среднем положении, сосуд 2 будет поднят выше сосуда 3 и начнется процесс перетекания жидкости в этот последний. Однако, груз 79 находится еще влево от положения неустойчивого равновесия. Когда в сосуд 3 перетечет определенное (почти все) количество жидкости, перевешивающее пустой сосуд 2 и лежащий на нем около положения неустойчивого равновесия груз 79, то произойдет дополнительный поворот коромысла и переход груза 79 через положение неустойчивого равновесия и падение этого груза вправо, вызывающее действие его выступа 27 на носик 22 рычага 72 и перемещение последнего в показанное на фиг. 1 крайнее левое положение, отвечающее впуску рабочей среды в левый конец цилиндра, т.-е. начало нового движения рабочего поршня вправо. Описанный цикл явлений повторяется после каждого полного хода поршня (вперед и назад), при чем ясно, что продолжительность остановки рабочего поршня в крайнем левом положении зависит исключительно от скорости перетекания жидкости из сосуда 2 в сосуд 3, т.-е. от установки клапана 6. Если желательно, чтобы рабочий поршень находился некоторое время в покое также и в другом крайнем положении, то достаточно ввести в описанное устройство следующие незначительные изменения: 1) в той ветви канала 4, которая направляется в верхнюю часть сосуда 2, установить клапан или кран, позволяющий регулировать сечение этого канала так, чтобы жидкость из сосуда 3 не успела перейти в сосуд 2 по обоим каналам 4 и 5 до момента опрокидывания груза 79 влево, а потребовало бы больщего времени, 2) продолжить тягу 77 за цапфу 7 7 влево и снабдить ее на этом продолжении пальцем, отвечающим пальцу 23, расположенному вправо от цапфы , 3) сделать высоту выступа или пальца 9 изменяемою. Если при помощи клапана или крана совершенно закрыть направленную вверх ветвь канала 4, то получим, очевидно, механизм, управляющий движениями поршня рабочего цилиндра так, что паузы в обоих концевых лоложениях будут одинаково длительны, ибо канал для перетекания будет один и тот же. Что касается устройства распределительного золотника рабочего цилиндра, то оно должно быть таким, чтобы перестановка золотника происходила возможно легко, так как тогда груз 19, производящий эту перестановку при посредстве рычага 72 и тяги 26 и штока 13, получится меньших размеров и сосуды 2 и 3, а также и их взаимное расстояние, могут быть уменьшены. Все это увеличит компактность устройства, уменьшит изнашивание и т. д. С этой целью золотник 74 действует так, что выпуск пара из машины происходит у его концов, так что нет надобности в пропуске штока 13 через сальник или другое уплотнение, что всегда связано с изменением сопротивления и, следовательно, с трудностями подбора соответствующей величины груза 79. 1. Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения с различными по продолжительности остановками ПРЕДМЕТ ПАТЕНТА. в крайних положениях, характеризующийся (фиг. 1 - 4) применением опрокидывающегося груза 79, переставляющего при падении в ту или доугую сторону рычаг 12, связанный с распределительным золотником 14 рабочего цилиндра, и коромысла 7 с сосудом 2 и 3, соо 3щающимися между собою при помощи широкого канала 4 из нижней части сосуда 3 в верхнюю часть сосуда 2 (или, наоборот) и при помощи второго канала 5, соединяющего сосуды 2 и 3 и снабженрегулируется независимым клапаном. ного клапаном 6, регулирующим пропуск жидкости, при чем установка рычага 72 и связанного с ним при помощи штанги 26 и штока 13, золотника 14 в среднее, положение, при котором оба конца рабочего цилиндра соединены с выпуском, производится пальцами 23 на штанге 77, перемещаемой поршнем рабочего цилиндра. 2. Видоизменение охарактеризованного в п. 1 механизма, отличающееся тем, что и сечение широкого канала 4 
Типо-литография «Красный Печатник, Ленннгрггд, Международный, 75. . Т г ц ...- 1
.2.
t
.
fS
- Р/и/г/. .