Фиг2
Изобретение относится к спортивным тренажерам, в частности к тренажерам для фехтования.
Известно устройство для тренировки спортсменов, содержащее смонтированные в опоре на стойке зеркало и средство для изменения угла его наклона, при этом опора выполнена в виде подвесного горизонтального троса, а стойки зеркала установлены на тросе через втулки и имеют средство для крепления к спортсмену в виде упругой трубки с размещенным на нем эластичным жгутом.
Недостатком данного устройства является то, что фехтовальщик выполняет и отрабатывает действия в условиях субъективного, визуального контроля (объективного или необъективного), при этом внимание спортсмена отвлекается зеркальным изображением от реального соперника, что не соответствует специфическим боевым условиям фехтования, т.е. спортсмен тренируется в искусственных условиях, весьма далеких от реального поединка.
Известно устройство для тренировки спортсменов, содержащее регулируемый тредбан и средство для создания нагрузки, связанное с поясом спортсмена.
Недостатком этого устройства является непригодность его использования для тренировки фехтовальщиков, поскольку для фехтования специфичны условия единоборства двух соперников, где скорость и вариативность перемещения фехтовальщиков не прогнозируемы и не зависимы друг от друга.
Известно также устройство для тренировки спортсменов, содержащее регулируемый тредбан со средством создания нагрузки, связанным с поясом спортсмена, а средство для создания нагрузки выполнено в виде маятника со сменным грузом.
Недостатком этого устройства является то, что создание дополнительной нагрузки, прикрепленной к поясу, не нужно для фехтовальщиков, поскольку эти дополнительные нагрузки не характерны для деятельности фехтовальщиков, а сама бесконечная ленточная дорожка, движущаяся в одну сторону при ограниченной полезной тренировочной площади, не позволяет воспроизводить всех условий фехтовального поединка и ситуаций единоборства двух соперников, а следовательно, применять дан- ное устройство в тренировках фехтовальщиков. Кроме того, само устройство связано с рядом неудобств в плане подготовки тредбана к тренировке, таких как настройка контуров, изменение величины грузов индивидуально для каждого
спортсмена, в то время как в тренировке фехтовальщиков участвуют два партнера. Недостатком данного устройства является и отсутствие обратной связи между скоро- стью перемещения спортсмена и скоростью перемещения ленточной дорожки, которая регулируется вручную, что понижает эффективность тренировки.
Известно, что фехтование является ви0 дом спортивных единоборств, содержанием
которых являются скоротечные по времени
выполнения схватки двух фехтовальщиков,
а основными условиями для подготовки и
осуществления этих схваток или боевых
5 действий являются всевозможные передвижения и маневры спортсменов с действием на оружие соперника или без него. При этом эффективность атакующих или защитных действий зависит от выбора соответствую0 щей дистанции, своевременности и особенно от скорости и точности выполняемых передвижений и действий, т.е. от совокупности отмеченных факторов. Следовательно, совершенствование отмеченных
5 качеств, навыков и умений фехтовальщиков является одной из основных задач тренировки, а технические средства, применяемые в занятиях фехтовальщиков, повышают эффективность процесса тренировки.
0Цель изобретения - повышение эффективности тренировки.
Поставленная цель достигается тем, что адаптивный фехтовальный тредбан содержит барабаны, кинематически связанные с
5 электродвигателями, опорные площадки с подвижными лентами, охватывающими барабаны, горизонтальные тяги, связанные с поясами спортсменов, вариативно-стыковочную конструкцию, осуществляющую
0 центральную, с максимальным зазором стыковку подвижных лент, причем первая и вторая подвижные ленты установлены с возможностью взаимодействия с вариативно-стыковочной конструкцией, кинематиче5 ски соединенной посредством прямоугольникообразных о порно-регул я- торных стоек с опорными площадками, шар- нирно установленными на опорах, при этом электродвигатели подключены к входам
0 блока управления скоростью электродвигателей, а выходы через регулировочные узлы кинематически связаны с поясами спортсменов.
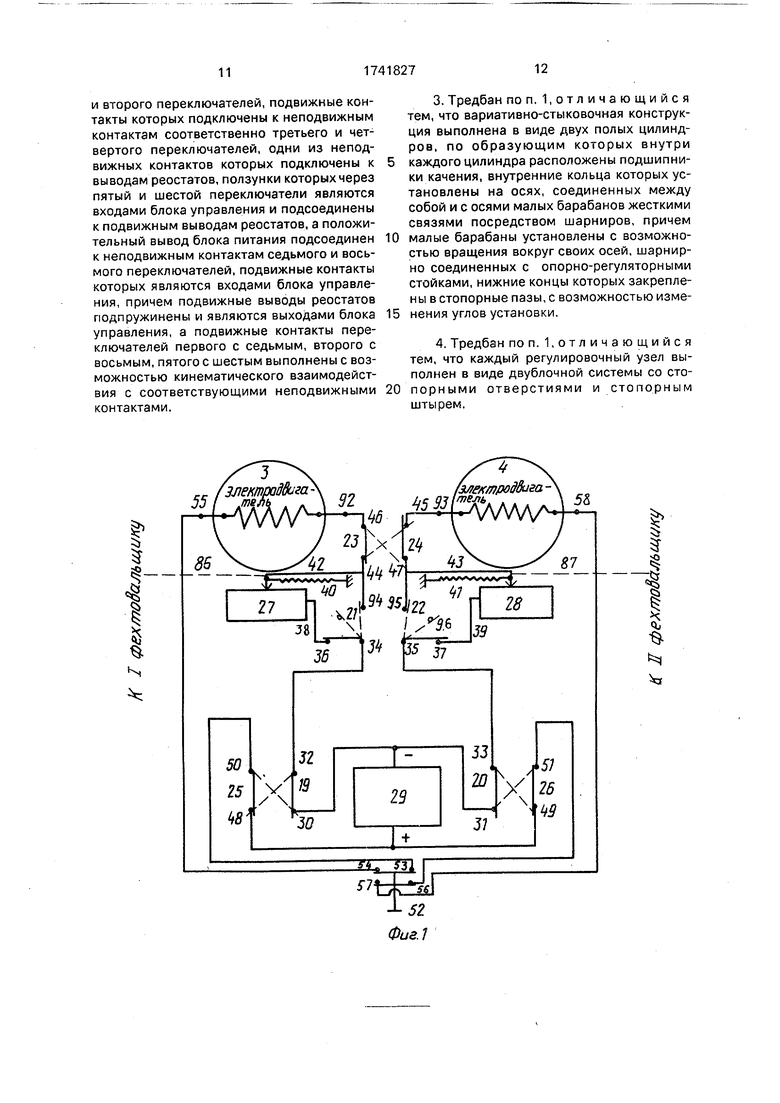
Блок управления скоростью электро5 двигателей содержит восемь переключателей, имеющих неподвижные и подвижные контакты, реостаты, блок питания, причем отрицательный вывод блока питания подсоединен к неподвижным контактам первого и второго переключателей, подвижные контакты которых подключены к неподвижным контактам соответственно третьего и четвертого переключателей, одни из неподвижных контактов которых подключены к выводам реостатов, подпружиненные ползунки которых через пятый и шестой переключатели являются входами блока управления и подсоединены к подвижным выводам реостатов, а положительный вывод блока питания подсоединен к неподвижным контактам седьмого и восьмого переключателей, подвижные контакты которых являются входами блока управления, а подвижные контакты переключателей первого с седьмым, второго с восьмым и пятого с шестым выполнены с возможностью кинематического взаимодействия с соответствующими неподвижными контактами, при этом изменение коммутации между перечисленными подвижными и неподвижными контактами переключателей первого с седьмым и второго с восьмым позволяет реверсировать работу электродвигателей, а подача питания для запуска электродвигателей осуществляется посредством выключателя, неподвижные контакты первой контактной пары которого соединены соответственно с неподвижным контактом седьмого переключателя и входом первого электродвигателя, неподвижные контакты второй контактной пары соединены с неподвижным контактом восьмого переключателя и входом второго электродвигателя. Вариативно-стыковочная конструкция выполнена в виде двух полых цилиндров по направляющим, а внутри каждого цилиндра расположены подшипники качения, внутренние кольца которых установлены на осях, соединенных между собой и осями малых барабанов жесткими связями посредством шарниров, причем малые барабаны установлены с возможностью вращения вокруг своих осей, шарнирно соединенных с опорно-регуляторными стойками, нижние торцы которых закреплены в стопорные пазы с возможностью изменения углов наклона опорных площадок как к горизонтальной оси, так и по отношению друг к другу, при этом измерение величины относительных углов осуществляется посредством угломера, установленного на основании тредбана по его вертикальной оси, проходящей по отметке 90° угломера. На боковых сторонах опорно-регулятор- ных стоек в местах их пересечения выполнены сквозные продольные прорези с помещением в них горизонтальных штырей (осей), соединяющих все боковые стороны в единый подвижный узел, позволяющий перемещение опорно-регуляторных стоек относительно друг друга.
Регулировочные узлы выполнены в виде полузакрытых двублочных систем с возможностью самовозврата, первые блоки которых кинематическими связями соединены с ползунками реостатов, а вторые блоки - гибкими горизонтальными тягами связаны с поясами спортсменов, при этом каждая
0 двублочная система имеет сквозное стопорное отверстие, выполненное в полукожухе и обоих блоках, а также стопорные штыри.
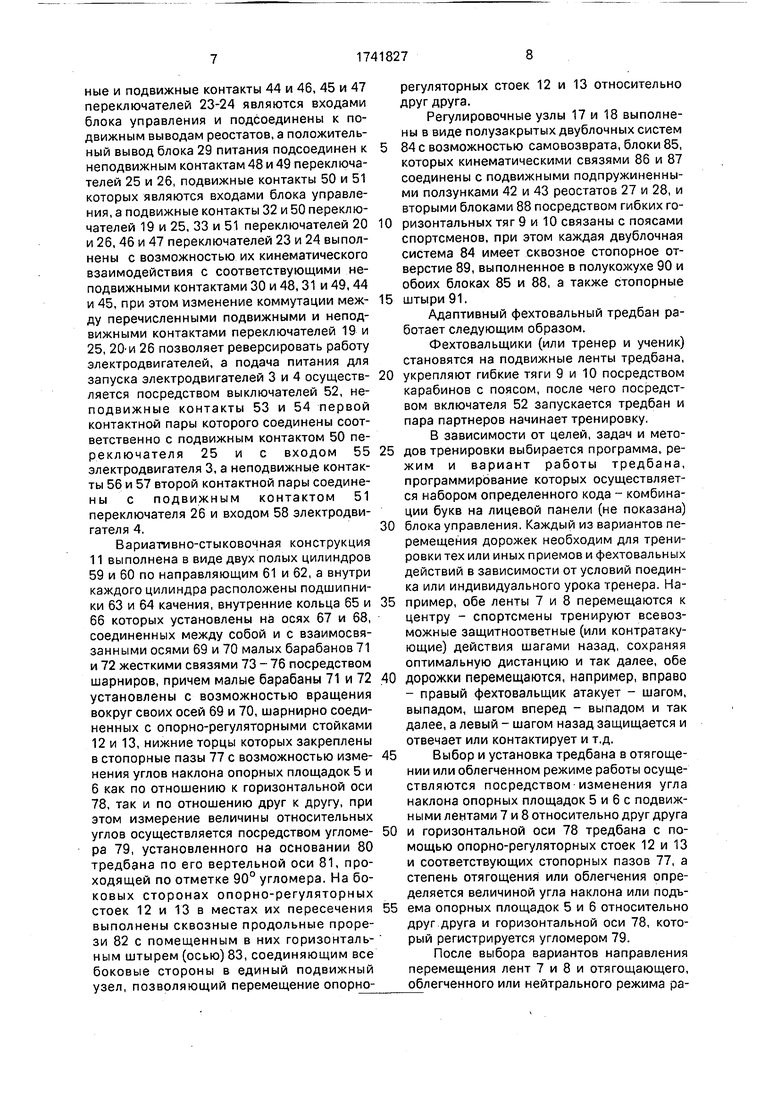
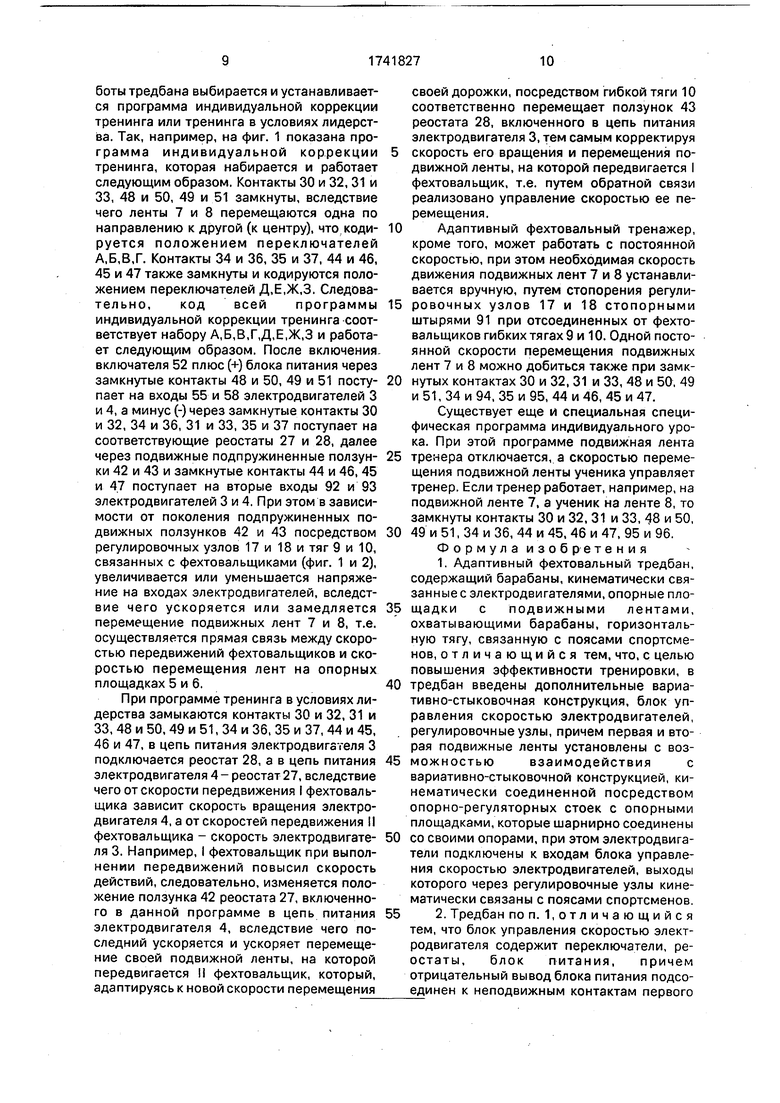
На фиг. 1 изображена схема блока управления скоростью электродвигателей; на
5 фиг. 2 - адаптивный фехтовальный тредбан, общий вид; на фиг. 3 - регулировочный узел в виде полузакрытой двублочной системы с механическими связями и стопорными элементами; на фиг. 4 - схема подключения
0 регулировочных узлов; нафиг.Б-регулятор- ная стойка вариативно-стыковочной конструкции тредбана.
Адаптивный фехтовальный тредбан содержит барабаны 1 и 2, кинематически свя5 занные с электродвигателями 3 и 4 опорные площадки 5 и 6 с подвижными лентами 7 и 8, охватывающими соответствующие барабаны 1 и 2, гибкие горизонтальные тяги 9 и 10, связанные с поясами спортсменов, вари0 ативно-стыковочную конструкцию 11, осуществляющую центральную, с минимальным зазором стыковку подвижных лент 7 и 8, причем подвижные ленты установлены с возможностью взаимодейст5 вия с вариативно-стыковочной конструкцией 11, кинематически соединенной посредством прямоугольникообрззных опорно-регуляторных стоек 12 и 13 с опорными площадками 5 и б, шарнирно установ0 ленными на опорах 14 и 15, при этом электродвигатели 1 и 2 подключены к входам блока 16 управления скоростью электродвигателей, а выходы через регулировочные узлы 17 и 18 кинематически
5 связаны с поясами спортсменов.
Блок управления скоростью электродвигателей содержит восемь переключателей 19-26, имеющих подвижные и неподвижные контакты, реостаты 27 и 28,
0 блок 29 питания, причем отрицательный вывод блока 29 питания подсоединен к неподвижным контактам 30 переключателя 19 и
31переключателя 20, подвижные контакты
32и 33 которых подключены к неподвиж- 5 ным контактам 34 и 35 соответственно переключателей 21 и 22, подвижные контакты 36 и 37 которых подключены к выводам 38 и 39 реостатов 27 и 28, подпружиненных элементами 40 и 41, подвижные ползунки 42 и 43 которых через соответствующие неподвижные и подвижные контакты 44 и 46, 45 и 47 переключателей 23-24 являются входами блока управления и подсоединены к подвижным выводам реостатов, а положительный вывод блока 29 питания подсоединен к неподвижным контактам 48 и 49 переключателей 25 и 26, подвижные контакты 50 и 51 которых являются входами блока управления, а подвижные контакты 32 и 50 переключателей 19 и 25, 33 и 51 переключателей 20 и 26, 46 и 47 переключателей 23 и 24 выполнены с возможностью их кинематического взаимодействия с соответствующими неподвижными контактами 30 и 48,31 и 49,44 и 45, при этом изменение коммутации меж- ду перечисленными подвижными и неподвижными контактами переключателей 19 и 25, 20 и 26 позволяет реверсировать работу электродвигателей, а подача питания для запуска электродвигателей 3 и 4 осуществ- ляется посредством выключателей 52, неподвижные контакты 53 и 54 первой контактной пары которого соединены соответственно с подвижным контактом 50 переключателя 25 и с входом 55 электродвигателя 3, а неподвижные контакты 56 и 57 второй контактной пары соедине- ны с подвижным контактом 51 переключателя 26 и входом 58 электродвигателя 4. Вариативно-стыковочная конструкция
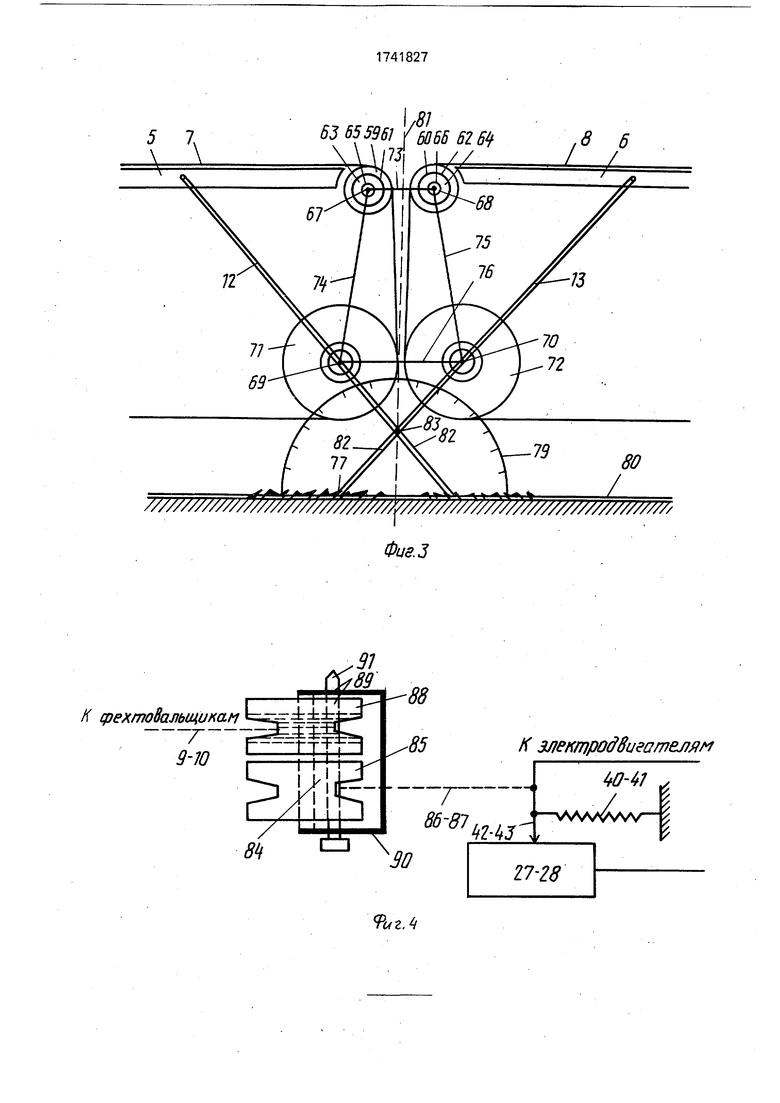
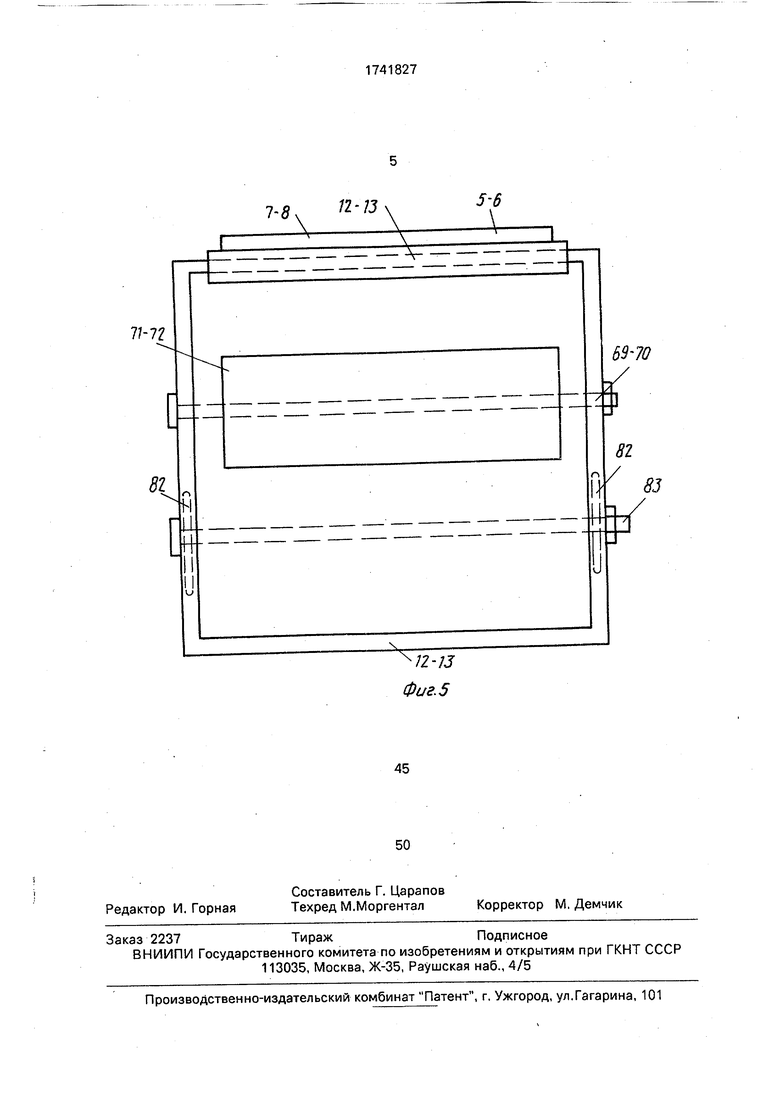
11выполнена в виде двух полых цилиндров 59 и 60 по направляющим 61 и 62, а внутри каждого цилиндра расположены подшипники 63 и 64 качения, внутренние кольца 65 и 66 которых установлены на осях 67 и 68, соединенных между собой и с взаимосвязанными осями 69 и 70 малых барабанов 71
и 72 жесткими связями 73 - 76 посредством шарниров, причем малые барабаны 71 и 72 установлены с возможностью вращения вокруг своих осей 69 и 70, шарнирно соединенных с опорно-регуляторными стойками
12и 13, нижние торцы которых закреплены
в стопорные пазы 77 с возможностью изме- нения углов наклона опорных площадок 5 и 6 как по отношению к горизонтальной оси 78, так и по отношению друг к другу, при этом измерение величины относительных углов осуществляется посредством угломе- ра 79, установленного на основании 80 тредбана по его вертельной оси 81, проходящей по отметке 90° угломера. На боковых сторонах опорно-регуляторных стоек 12 и 13 в местах их пересечения выполнены сквозные продольные прорези 82 с помещенным в них горизонталь- ным штырем (осью) 83, соединяющим все боковые стороны в единый подвижный узел, позволяющий перемещение опорнорегуляторных стоек 12 и 13 относительно друг друга.
Регулировочные узлы 17 и 18 выполнены в виде полузакрытых двублочных систем 84 с возможностью самовозврата, блоки 85, которых кинематическими связями 86 и 87 соединены с подвижными подпружиненными ползунками 42 и 43 реостатов 27 и 28, и вторыми блоками 88 посредством гибких горизонтальных тяг 9 и 10 связаны с поясами спортсменов, при этом каждая двублочная система 84 имеет сквозное стопорное отверстие 89, выполненное в полукожухе 90 и обоих блоках 85 и 88, а также стопорные штыри 91.
Адаптивный фехтовальный тредбан работает следующим образом.
Фехтовальщики (или тренер и ученик) становятся на подвижные ленты тредбана, укрепляют гибкие тяги 9 и 10 посредством карабинов с поясом, после чего посредством включателя 52 запускается тредбан и пара партнеров начинает тренировку.
В зависимости от целей, задач и методов тренировки выбирается программа, режим и вариант работы тредбана, программирование которых осуществляется набором определенного кода - комбинации букв на лицевой панели (не показана) блока управления. Каждый из вариантов перемещения дорожек необходим для тренировки тех или иных приемов и фехтовальных действий в зависимости от условий поединка или индивидуального урока тренера. Например, обе ленты 7 и 8 перемещаются к центру - спортсмены тренируют всевозможные защитноответные (или контратакующие) действия шагами назад, сохраняя оптимальную дистанцию и так далее, обе дорожки перемещаются, например, вправо - правый фехтовальщик атакует - шагом, выпадом, шагом вперед - выпадом и так далее, а левый - шагом назад защищается и отвечает или контактирует и т.д.
Выбор и установка тредбана в отягощении или облегченном режиме работы осуществляются посредством изменения угла наклона опорных площадок 5 и 6 с подвижными лентами 7 и 8 относительно друг друга и горизонтальной оси 78 тредбана с помощью опорно-регуляторных стоек 12 и 13 и соответствующих стопорных пазов 77, а степень отягощения или облегчения определяется величиной угла наклона или подъема опорных площадок 5 и 6 относительно друг друга и горизонтальной оси 78, который регистрируется угломером 79.
После выбора вариантов направления
перемещения лент 7 и 8 и отягощающего,
Облегченного или нейтрального режима работы тредбана выбирается и устанавливается программа индивидуальной коррекции тренинга или тренинга в условиях лидерства. Так, например, на фиг. 1 показана программа индивидуальной коррекции тренинга, которая набирается и работает следующим образом. Контакты 30 и 32, 31 и 33, 48 и 50, 49 и 51 замкнуты, вследствие чего ленты 7 и 8 перемещаются одна по направлению к другой (к центру), что кодируется положением переключателей А,Б,В,Г. Контакты 34 и 36, 35 и 37, 44 и 46,
45и 47 также замкнуты и кодируются положением переключателей Д,Е,Ж,3. Следовательно, код всей программы индивидуальной коррекции тренинга соответствует набору А,Б,В,Г,Д,Е,Ж,3 и работает следующим образом. После включения- включателя 52 плюс (+) блока питания через замкнутые контакты 48 и 50, 49 и 51 поступает на входы 55 и 58 электродвигателей 3 и 4, а минус (-) через замкнутые контакты 30 и 32, 34 и 36, 31 и 33, 35 и 37 поступает на соответствующие реостаты 27 и 28, далее через подвижные подпружиненные ползунки 42 и 43 и замкнутые контакты 44 и 46, 45 и 47 поступает на вторые входы 92 и 93 электродвигателей 3 и 4. При этом в зависимости от поколения подпружиненных подвижных ползунков 42 и 43 посредством регулировочных узлов 17 и 18 и тяг 9 и 10, связанных с фехтовальщиками (фиг. 1 и 2), увеличивается или уменьшается напряжение на входах электродвигателей, вследствие чего ускоряется или замедляется перемещение подвижных лент 7 и 8, т.е. осуществляется прямая связь между скоростью передвижений фехтовальщиков и скоростью перемещения лент на опорных площадках 5 и 6.
При программе тренинга в условиях лидерства замыкаются контакты 30 и 32, 31 и 33, 48 и 50, 49 и 51, 34 и 36, 35 и 37, 44 и 45,
46и 47, в цепь питания электродвигателя 3 подключается реостат 28, а в цепь питания электродвигателя 4- реостат 27, вследствие чего от скорости передвижения I фехтовальщика зависит скорость вращения электродвигателя 4, а от скоростей передвижения И фехтовальщика - скорость электродвигателя 3. Например, I фехтовальщик при выполнении передвижений повысил скорость действий, следовательно, изменяется положение ползунка 42 реостата 27, включенного в данной программе в цепь питания электродвигателя 4, вследствие чего последний ускоряется и ускоряет перемещение своей подвижной ленты, на которой передвигается II фехтовальщик, который, адаптируясь к новой скорости перемещения
своей дорожки, посредством гибкой тяги 10 соответственно перемещает ползунок 43 реостата 28, включенного в цепь питания электродвигателя 3, тем самым корректируя
скорость его вращения и перемещения подвижной ленты, на которой передвигается I фехтовальщик, т.е. путем обратной связи реализовано управление скоростью ее перемещения.
0 Адаптивный фехтовальный тренажер, кроме того, может работать с постоянной скоростью, при этом необходимая скорость движения подвижных лент 7 и 8 устанавливается вручную, путем стопорения регули5 ровочных узлов 17 и 18 стопорными штырями 91 при отсоединенных от фехтовальщиков гибких тягах 9 и 10. Одной постоянной скорости перемещения подвижных лент 7 и 8 можно добиться также при замк0 нутых контактах 30 и 32, 31 и 33, 48 и 50, 49 и 51, 34 и 94, 35 и 95, 44 и 46, 45 и 47.
Существует еще и специальная специфическая программа индивидуального урока. При этой программе подвижная лента
5 тренера отключается, а скоростью перемещения подвижной ленты ученика управляет тренер. Если тренер работает, например, на подвижной ленте 7, а ученик на ленте 8, то замкнуты контакты 30 и 32, 31 и 33, 48 и 50,
0 49 и 51, 34 и 36, 44 и 45, 46 и 47, 95 и 96. Ф о р м у л а и з о б р ете н и я 1. Адаптивный фехтовальный тредбан, содержащий барабаны, кинематически связанные с электродвигателями, опорные пло5 щадки с подвижными лентами, охватывающими барабаны, горизонтальную тягу, связанную с поясами спортсменов, отличающийся тем, что, с целью повышения эффективности тренировки, в
0 тредбан введены дополнительные вариативно-стыковочная конструкция, блок управления скоростью электродвигателей, регулировочные узлы, причем первая и вторая подвижные ленты установлены с воз5 можностью взаимодействия с вариативно-стыковочной конструкцией, кинематически соединенной посредством опорно-регуляторных стоек с опорными площадками, которые шарнирно соединены
0 со своими опорами, при этом электродвигатели подключены к входам блока управления скоростью электродвигателей, выходы которого через регулировочные узлы кинематически связаны с поясами спортсменов.
5 2. Тредбан по п. 1,отличающийся тем, что блок управления скоростью электродвигателя содержит переключатели, реостаты, блок питания, причем отрицательный вывод блока питания подсо- единен к неподвижным контактам первого
и второго переключателей, подвижные контакты которых подключены к неподвижным контактам соответственно третьего и четвертого переключателей, одни из неподвижных контактов которых подключены к выводам реостатов, ползунки которых через пятый и шестой переключатели являются входами блока управления и подсоединены к подвижным выводам реостатов, а положительный вывод блока питания подсоединен к неподвижным контактам седьмого и восьмого переключателей, подвижные контакты которых являются входами блока управления, причем подвижные выводы реостатов подпружинены и являются выходами блока управления, а подвижные контакты переключателей первого с седьмым, второго с восьмым, пятого с шестым выполнены с возможностью кинематического взаимодействия с соответствующими неподвижными контактами.
0
5
3. Тредбан по п. 1,отличающийся тем, что вариативно-стыковочная конструкция выполнена в виде двух полых цилиндров, по образующим которых внутри каждого цилиндра расположены подшипники качения, внутренние кольца которых установлены на осях, соединенных между собой и с осями малых барабанов жесткими связями посредством шарниров, причем малые барабаны установлены с возможностью вращения вокруг своих осей, шарнир- но соединенных с опорно-регуляторными стойками, нижние концы которых закреплены в стопорные пазы, с возможностью изменения углов установки.
4. Тредбан поп. 1,отличающийся тем, что каждый регулировочный узел выполнен в виде двублочной системы со сто- порными отверстиями и стопорным штырем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Коньки | 1982 |
|
SU1110461A1 |
| Устройство для тренировки спортсменов | 1990 |
|
SU1771772A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ В СПОРТИВНЫХ ЛОКОМОЦИЯХ | 1997 |
|
RU2111037C1 |
| СПОСОБ РЕГИСТРАЦИИ УКОЛОВ ПРИ ФЕХТОВАНИИ (ВАРИАНТЫ), СИСТЕМА РЕГИСТРАЦИИ УКОЛОВ ПРИ ФЕХТОВАНИИ, ИНДИВИДУАЛЬНЫЙ АППАРАТ СПОРТСМЕНА И НАКОНЕЧНИК ДЛЯ РЕГИСТРАЦИИ УКОЛОВ ПРИ ФЕХТОВАНИИ | 2005 |
|
RU2292933C2 |
| Фехтовальный костюм | 1990 |
|
SU1827278A1 |
| Тренажер для фехтования | 1976 |
|
SU629941A1 |
| СПОСОБ РЕАБИЛИТАЦИИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2054920C1 |
| Настольная игра | 1986 |
|
SU1567234A1 |
| Устройство для тренировки фехтовальщиков | 1975 |
|
SU523698A1 |
| Тренажер для фехтования | 1986 |
|
SU1437047A1 |
Сущность изобретения: адаптивный фехтовальный тредбан содержит блок управления 16 скоростью вращения электродвигателей 1 и 2 и средство имитации перемещения фехтовальщиков, выполненное в виде двух ленточных дорожек 7 и 8, помещенных на рабочие опорные площадки 5 и 6, шарнирно закрепленные на неподвижных опорах. Ленточные дорожки состыкованы по высоте и плоскости перемещения, находятся на одной горизонтальной оси и имеют вариативно-стыковочную конструкцию, позволяющую изменять угол наклона дорожек по отношению к горизонтальной оси, устанавливающей облегченный или отягощенный режимы тренировки фехтовальщиков. Блок управления 16 позволяет оперативно изменять варианты направления перемещения ленточных дорожек. 3 з п. ф-лы, 5 ил. СО с
92
$1 i
N Ч
I
S
Н
Ъ N V
L
I 81
63655961 /6066 6264 1Ц 11 //
////////////////////////////////////
Фиа.З
К срехтоОалыцикам t giijb
Г Ш:
9-Ю
ГТТМ 5К жктродбиеат
Щ---{IS
I-./ Ill-Ififi-Q7J -VAAAWVV -
V I 1L J
8t Q I1
,8 6 Г /
91 89
.
| Устройство для тренировки спортсменов | 1980 |
|
SU971373A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Устройство для тренировки спортсменовС МячОМ | 1979 |
|
SU810250A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Устройство для тренировки спортсменов | 1979 |
|
SU820856A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
