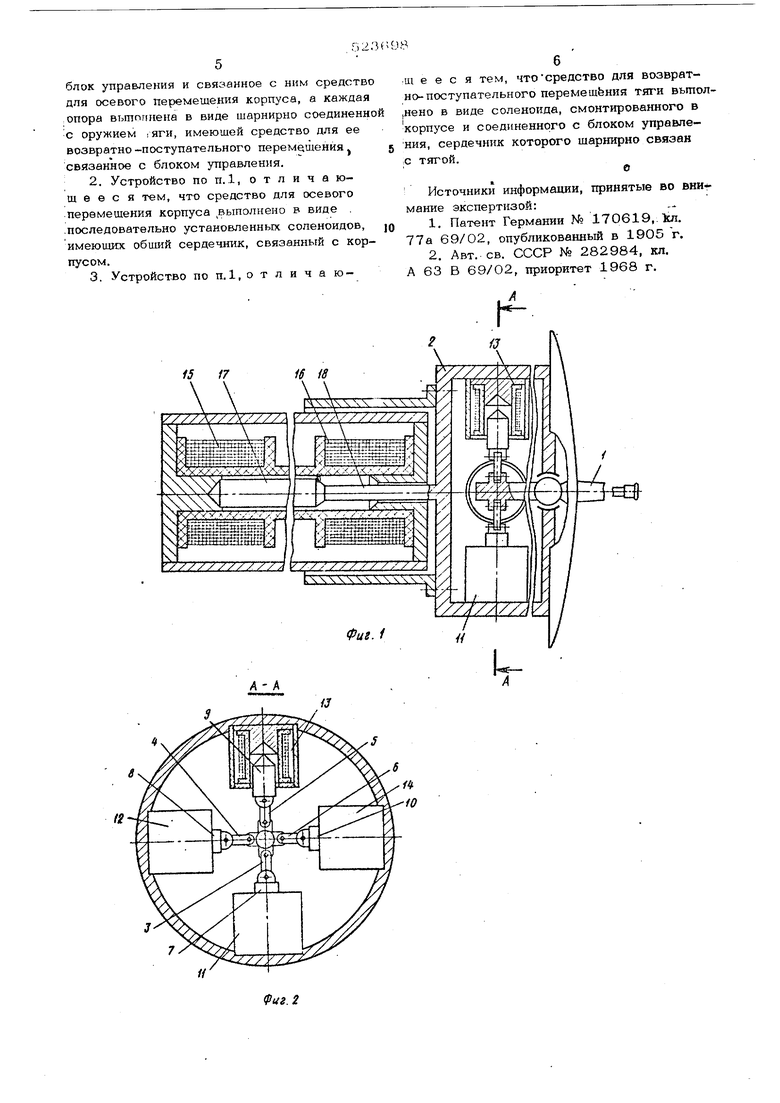
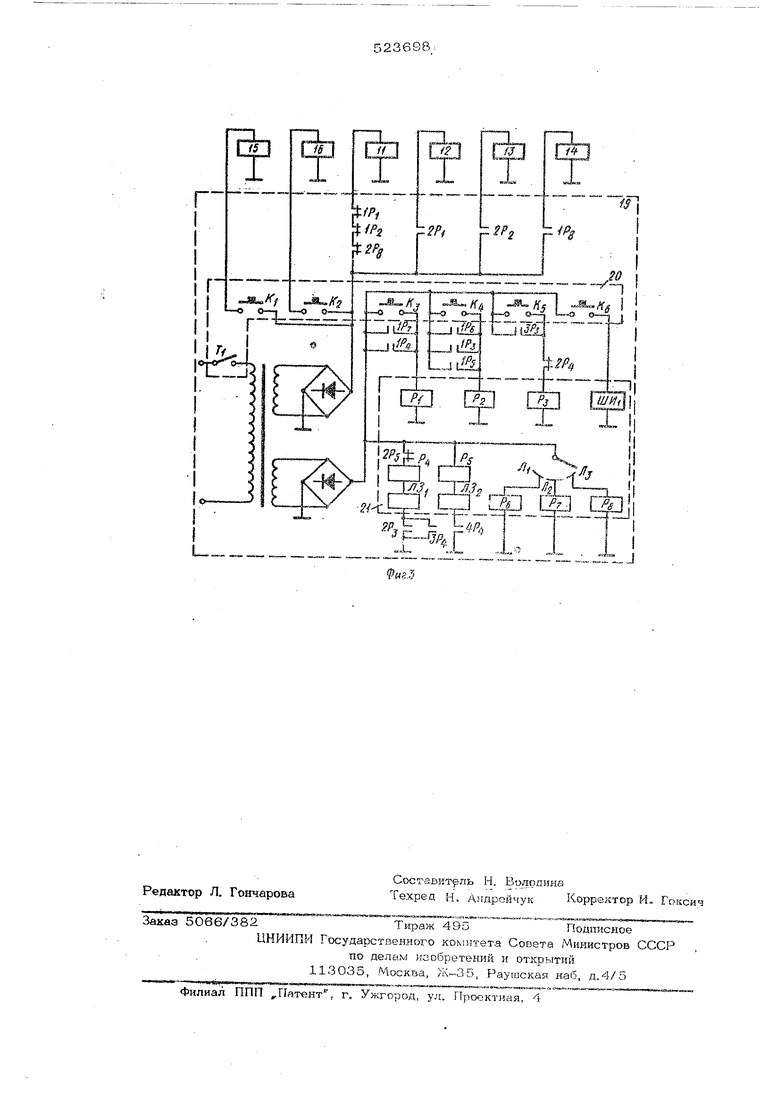
(54) yctPOHCTBO ДЛЯ ТРЕНИРСеКИ :ФЕХТСвАЛЬЩИКОВ 17 которых соединен с корпусом 1 через шток 18. При этом cojieHOHflbiv, закрепленные в корпусе, расположены в плоскости, перпендикулярной осевому движению корпуса. Обмотки соленоидов 11 - 16 соединены электрически с блоком управления 19, содержащим командный пульт 2О и коммутатор 21. Командный пульт содержит кнопки К - Kg и тумблер Т . Коммутатор включает раде Р в задержки ЛЗ , ЛЗ и шаговый искатель ШИ . Работает устройство следуюидам образом.; Движением клинка; (оружия) управляют с (командного пульта 20 подачей питающего напряжения на обмотки; соленоидов 15,16, 11,12,13,14. Блок управления подключ«ж т S питающей сети тумблером Т ,.при этом подается питание на обмотку соленоида 12. Под действием электромагнитного поля сердечник 8 втягивается внутрь соленоида и смешает клинок вправо (фиг. 2). Для приведения клин ка в исходную позицию нажимают кнопку К , Подвижный сердечник 17 втягивается внутрь соленоида 15, и корпус 2 переМе- щается влево (фиг. 1) .: Имитация атакуюшего движения -клинка ироисходит нажатием кнопки К на командJHOM пульте, при этом питающее напряже- ние подаете на обмотку соленоида 16, подважный сердечник 17 втягивается-внутрь этого соленоида , выталкивая клинок вперед (вправо). Кнопками К, и К . подается питающее напряжение соответственно на реле , Р, и Р,, которые контактами 1Р и 1Р отключают питание соленоида 12 и подключают (контакты 2Р , 2Р ) питание соленоидов 11 и 14. Подвижные сердечники 7 и 10 соленоидов 11, 14 управляют движением клинка, который смещается влево или вверх, имитируя тем caMbnvi защитные движения рук фехтовальщика (фехтовальные позиции: зашита 4 лли „зашита 7). Кнопкой Kj. имитируется фехтовальная позиция ,перевод, т.е. перемещение клинка из ИС.ХОДНОЙ позиции в позицию „защита 7 с последующим перемещением в позицию „защита 4 и возвращением в исходн то позицию через позицию „защита 7. При нажатии кнопки К- подается питание на обмотку реле Р, которое; подключает контактом IPj питание реле Р , контактом SPj встает на самопитание, а контактом ;21 подаетсигнал на включение репеРц череЦ ЛИНИЮ задержки ЛЗ . При подаче питания на i реле Pg клинок перемещается в позицию защй:та 7. Включение реле F5,происходит через (., обусловленное линией задержки ЛЗ, при 52 6 этом контактом .iP включается питание на реле Р| , контактом 2Р снимается питание реле Р, , контактом ЗРд реле Рд встает на самопитание, а контактом 4Рд подает сигнал на включение реле Р,. через линию задериски ЛЗ , Клинок смешается в позицию „зашита 4. Через время, обусловленное линией задержки. ЛЗ . , включается реле Ру , которое контактом IPy включает питание реле Р , а контактом 2Р, снима е питание реле Рд. , при этом клинок смещается в позицию „зашита 7, .После отключения реле PJ- клинок перемешается в исходную позицию. | Нажатием кнопки К имитируются круговые движения руки фехтовальщика, т.е. перемещения из исходной позиции в позицию „зашита 7, после чего в позицию „зашита 4 с последующим перемещением клинка ввер.х (в сторону соленоида 13) и возвращением в исходную-позицию. При нажатии кнопки К подается питание на обмотку шагового искателя ШИ , , ламели которого управляют питанием ряле Р Р т При подаче питания на реле Р. подается питание на реле Р , и клинок смешается в позицию зашита 7. Со второй ламели ШИ подается питание на обмотку реле Р , которое управляет питанием реле Р , и клинок смешается в позицию защита 4. С третьеК ламели подается питание на обмотку реле Pg , после срабатывания которого подается питание на обмотку соленоида 13, и клинок смешается вниз, после чего он смещается в исходную позицию. Подбирая соответствующие комбинации команд, вьтолняют движения клинка с выдвижением вперед и втягиванием обратно со смещением в позицию , за.шита 4,. „защита 7 и совершением круговых-движений (имитация атакующих действий с последуюшим защитным движением) , а также прямо противоположных движений (имитация защитных .движений с последующим атакующим действием). Благодаря такой возможности моделирования определенной последовательности движений руки противника повышается, эффективность тренировки фе.хтовальтика. Формула изобретения 1. Устройство для тренировки фехтовальгщиков , содержащее оружие, смонтированное в корпусе посредством диаметрально противоположных опор, отличающеес я тем, что, с целью повышения эффективности тренировки п;утем имитации характер- иых движений руки фе.хтовальшика , оно имеет блок управления и связанное с ним средство для осевого перемещения корпуса, а каждая опора вьтпгяюна в виде шарнирно соединенно с оружием гяги, имеющей средство для ее возвратно -поступательного перемещения связанное с блоком управления. 2.Устройство по п. 1, отличающееся тем, что средство для осевого перемещения корпуса выполнено в виде . последовательно установленных соленоидов, имеющих общий сердечник, связанный с корпусом. 3.Устройство поп. 1,отличаю15 17
:Щ е е с я тем, чтосредство для возвратно-поступательного перемещения тяги вьшол|нено в виде соленоида, смонтированного в корпусе и соединенного с блоком управления, сердечник которого шарнирно связан с тягой. Источники информации, принятые во внимание экспертизой:-1.Патент Германии № 170619,.1сл. 77а 69/02, опубликованный в 1905 г. 2.Авт. св. СССР № 282984, кл. А 63 В 69/02, приоритет 1968 г.
J