131
ройства. Основания 1 и 2 и упругий элемент 4 вьшолнены единым блоком в виде полужесткой муфты с прямоугольными гоф рами 5. Угловое или поступательное перемещение, подвижного основания 2 с регулируемым объектом 36 относительно неподвижного основания 1 осуществляется посредством регулировочного механизма. Поворот эксцентриковой цапфы I4 регулировочного элемента 1 2 вызывает вращение шпильки 6 вокруг ее оси за счет взаимодействия
1
Изобретение относится к оптико- механическому приборостроению и может быть использовано для прецизионной юстировки зеркал автоколлиматоров, резонаторов оптических квантовых генераторов, измерителей параметров движения в контрольно-испытательной аппаратуре и других устройств, требующих точной выставки по двум сопряженным направлениям при ограниченном подходе к регулировочным эле- ментам.
Цель изобретения- - повышение точности юстировки, удобства эксплуатации и увеличение диапазона юстировки.
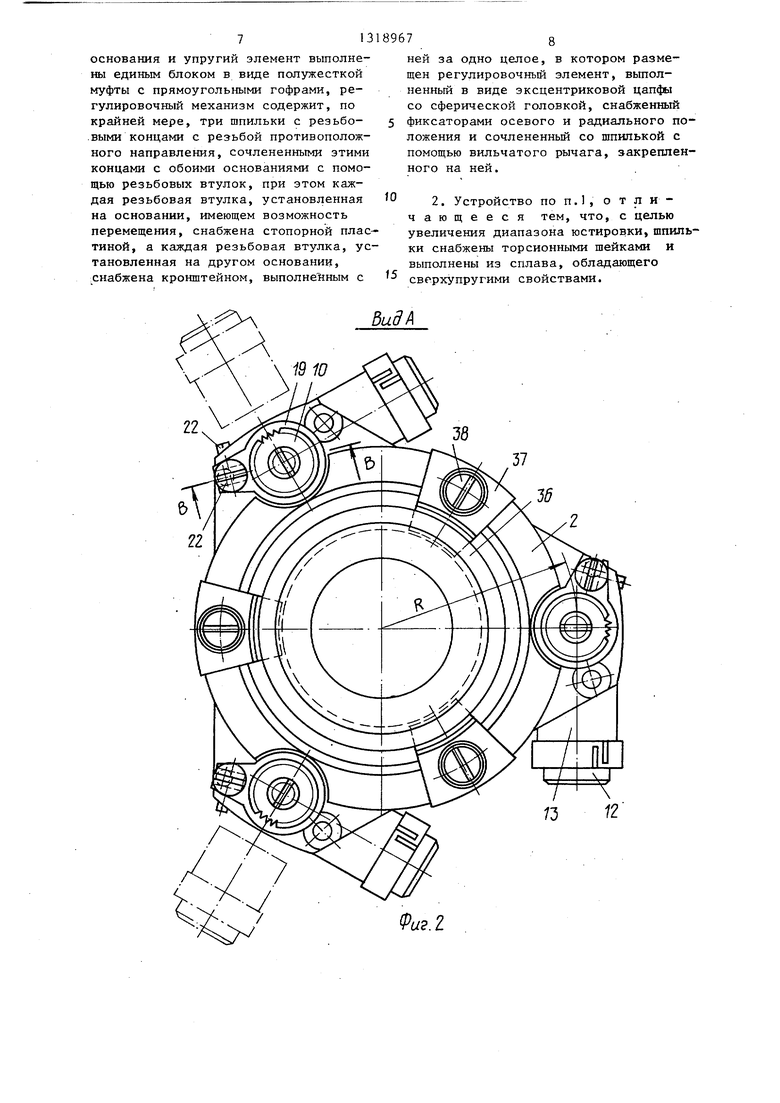
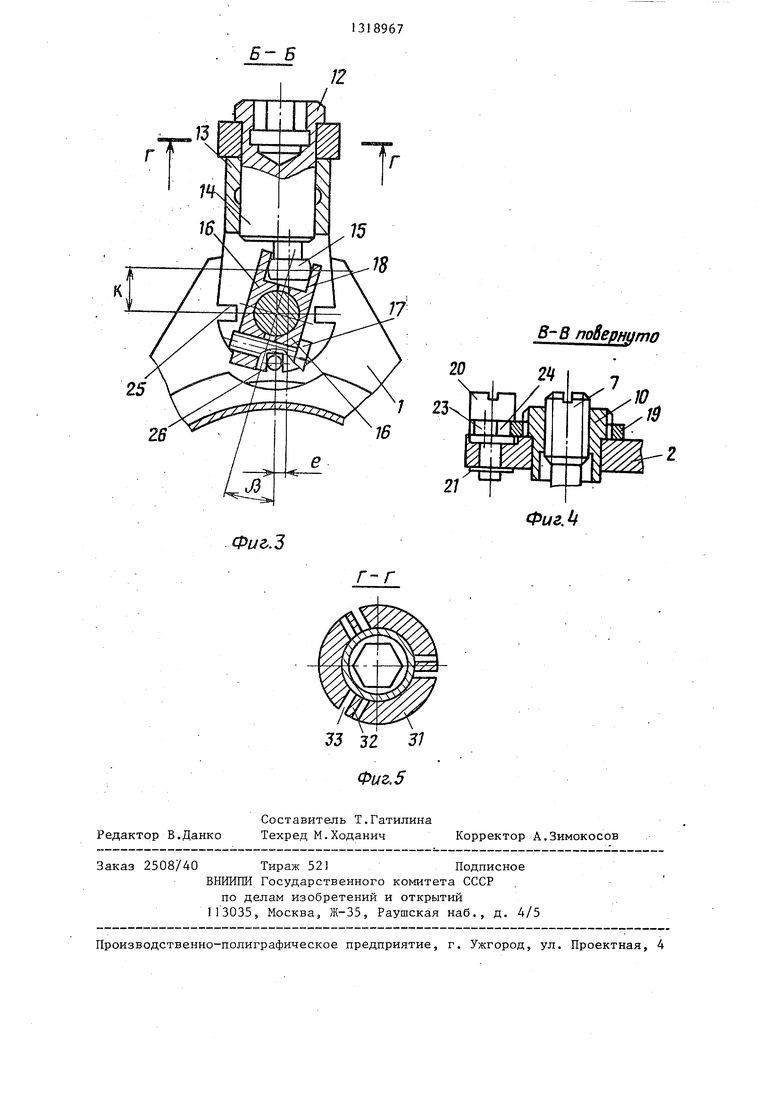
На фиг.1 представлена конструкция юстировочного устройства; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б,на фиг.1; на фиг.4 - разрез В-В на фиг.2; на фиг.З - разрез Г-Г на фиг.3.
Юстировочное устройство состоит из неподвижного 1 и подвижного 2 оснований с посадочным местом 3, упругого элемента 4, соединяющего основания и выполненного вместе с ними из единого блока в виде полужесткой муфты с прямоугольными гофрами 5, механизма юстировки, вьтолненного в виде трех шпилек 6 с резьбовыми концами 7 и 8 с резьбой противоположного направления (левая и правая) и торсионными шейками 9, установленных параллельно друг другу по окружности радиуса R через 120 и образующих кинематическую связь с основаниями посредством резьбовых втулок 10 (левая
967
сферической Голбвки 15 с вилкой 18 вильчатого рычага 16. Возвратно-поступательное движение трех птилек 6 относительно резьбовых втулок 10 и 11, с которыми концы 7, 8 шпилек с резьбой противоположного направления образуют винтовые пары, вызывает перемещение основания 2. Резьбовые ,втулки 1 о снабжены стопорными пластинками 19 дробной фиксации с эксцентриками 20. 1 з.п. ф-лы, 5 ил.
резьба) и i 1 (.правая резьба) и регулировочных элементов 12, установленных на неподвижном основании 1 с помощью поворотных кронштейнов 13.
Регулировочные элементы 12 выпол- неда в виде эксцентриковых цапф 14 со сферическими головками 15 и образуют кинематическую связь со шпильками 6 при помощи вильчатых рычагов 16,
каждый из которых закреплен на шпильке 6 с помощью, например, клеммового соединения и винтом 17 и своей вилкой 18 охватывает сферическую головку 15 эксцентриковой цапфы 14. Резьбовые втулки 10 установлены на под- вижном основании 2 и снабжены стопорными пластинками 19 дробной,фиксации с эксцентриками 20, которые установлены на подвижном основании 2 при
помощи упорных быстросъемных шайб 21 и стопорных винтов 22. Каждьш эксцентрик 20 образует кинематическую связь с пластинкой 19 дробной фиксации эксцентричной шейкой 23, помещенной в-паз 24.
Поворотные кронштейны 13 закреплены на неподвижном основании 1 с помощью резьбовых втулок 1I и выполнены с ними в виде одной детали, при- .
чем каждая резьбовая втулка I1 снабжена пазами 25, например тремя, и фиксируется от поворота относительно неподвижного основания 1 штифтом 26, зaxoдяшJ м в паз 25, и гайкой 27.
Регулировочные элементы 12 снабжены фиксаторами осевого и радиального положения. Каждый фиксатор осевого
313
положения вьтолнен в виде шарика 28, подпружиненного пружиной 29, размещен в теле эксцентриковой цапфы 14 и образует кинематическую связь с поворотным кронштейном 13 посредством его кольцевой канавки 30. Каждый фиксатор радиального положения выполнен в виде упругого кольца 31, упругие элементы 32 которого образованы общей стенкой встречных пазов 33 и равномерно расположены по окружности например через 120 . Упругое кольцо 31 выполнено с возможностью взаимодействия с эксцентриковой цапфой 14 за счет фрикционной связи трущихся поверхностей, возникающих от посадки с натягом в пределах упругой деформации материала упругих элементов 32, и от поворота относительно поворотного кронштейна 13 зафиксировано штифтом 34, входящим в его дополнительный паз 35,
. В посадочное место 3 подвижного основания 2 установлен регулируемый объект 36, например измеритель параметров движения, который закреплен при помощи крепежных сухарей 37 и невыпадающих винтов 38, снабженных чашками 39 для удержания жала отвертки в шлице при затяжке винтов.
Работа предлагаемого устройства основана на преобразовании поворота регулировочного элемента 12 посредством юстировочного механизма в угловое или поступательное перемещение подвижного основания 2 с установленным регулируемьм объектом 36 относительно неподвижного основания 1.
Работа юстировочного механизма основана также на преобразовании вращательного движения эксцентриковой цапфы i 4 в качательное движение шпильки 6 вокруг ее оси путем взаимодействия сферической головки I5 с вилкой 18 вильчатого рычага 16, который неподвижно закреплен на шпильке 6, а также на преобразовании качательного (вращательного) движения шпильки 6 в ее возвратно-поступательное движение относительно резьбовых 10 и II, с которыми шпилька 6 своими резьбовыми концами 7 и 8 образуют винтовые пары. При этом возвратно-поступательное перемещение одной шпильки 6 приводит к перекосу подвижного основания 2 в плоскости, перпендикулярной другой плоскости, проходящей через оси двух других неподвижных шпи-
74
ек 6, а синхронное перемещение одновременно трех шпилек 6 приводит к поступательному параллельному перемещению подвижного основания относительно неподвижного (например, для случая изменения фокусного расстояния оптического элемента), причем поступательное параллельное перемещение воз можно только при условии, что
начало движения будет происходить от исходного положения всех трех регулировочных элементов 12.
Перекос подвижного основания 2 относительно неподвижного основания I
для шпилек из обычного материала возможен за счет гарантированного радиального зазора в резьбовом соединё
м/ 6 НИИ винтовых пар, например М4 п
(для диапазона регулировки по двум взаимно перпендикулярным направлениям не более 120 угл.мин при длине резьбовой части втулок 10 и 11 не
более 1,5 диаметра резьбы, что достаточно, например, для юстировки современного измерителя параметров движения), оставшиеся зазоры будут выбраны за счет силового замыкания от упругих сил упругого элемента 4.
При необходимости получения больших диапазонов регулировки при минимальном радиальном зазоре в резьбоBOM соединении следует применить шпильки 6, снабженные торсионными шейками 9 и выполненные из специального сплава, обладающего сверхупругими свойствами (например, сплав меди
с содержанием алюминия 14,3% и никеля 3%, изготовленный по специальной технологии). При этом перекос подвижного основания 2 относительно неподвижного основания 1 будет возможным
за счет изгиба торсионных шеек 9, и выбор оставшихся зазоров в резьбовых парах будет осуществлен дополнительно за счет ершового замыкания от упругих сил в материале шпилек 6 от их
напряжения при изгибе.
Исходным положением устройства является такое положение, при котором все три регулировочных элемента 12 находятся в нейтральном положении,
т.е. сферические головки 15 эксцентриковых цапф 14 находятся одновременно в верхнем или нижнем положении, а вильчатые рычаги 16, сопряженные с ними, занимают среднее угловое положенне между углами поворота шпильки 6.
Заневоливание упругого элемента 4 и предварительная прецизионная выставка посадочного места 3 подвижного основания 2 относительно неподвижного основаршя I выполняются в процессе око11чательной сборки устройства следующим образом.
Предварительно замеряется расстояние Н между подвижным и неподвижным основаниями 2 и 1 при свободном не нагруженном состоянии упругого эле- мецта 4 и паспортизуется. Затем про- изводится сборка всех входящих элементов устройства и поворотных кронштейнов 1 3. в необходимом направлении в зависимости от направления подхода при эксплуатации. Заневоливание упругого элемента 4 производится при помощи поворота резьбовых втулок 10 при зафиксированных шпильках в рабочем положении на величину Н, которая при проектировании рассчитывается таким образом, чтобы при работе устройства в заданном диапазоне юстировки напряжения в материала при деформации упругого элемента 4 не превысили предела упругости и не произошла потеря силового замыкания.
После заневолевания упругого элемента 4 производится прецизионная выставка посадочного места 3 подвижного основания 2 относительно неподвижного основания 1 с помощью стопорных пластинок 19 дробной фиксации и эксцентриков 20, при этом регулировочные элементы 12 должны быть зафиксированы в одном нейтральном положении. Параллельность посадочного места 3 подвижного основания 2 относительно базов.ой установочной плоскости неподвижного основания 1 при выставке контролируется, например, индикатором часового типа.
По окончании выставки эксцентрики 20 фиксируются стопорными винтами 22, и устройство готово к работе.
Зависимость угла наклона подвижного основания 2 относительно неподвижного основания 1 от величины угла поворота одного регулировочного элемента 12 и от геометрии элементов механизма юстировки определяется по формулам:
для шпильки с резьбой противоположного направления
tgai
.1 1,5R 360
„ e sinf где
для шпильки с дифференциальной резьбой
10
tgut
.§11
1,5 R 360
где об - угол наклона подвижного основания 2;
S - шаг правой или крупной резьбы;
Sj - шаг левой или мелкой резьбы; |i - угол поворота шпильки 6; е - эксцентриситет эксцентриковой цапфы 14;
у - угол поворота регулировочного элемента 12;
К - проекция плеча вильчатого рычага 1 б на ось вращения эксцентриковой цапфы 14;
R - радиус окружности расположения шпилек 6.
Например, для шпильки с резьбой противоположного направления М4 и |М4 LH, S, S 0,7 мм; е 1,6 мм; i
j
К 6 мм; R 35 мм диапазон юстировки составит oi 4 20 угл.мин с чувствительностью регулировки йо 1,2- 0,3 угл.с (минимальный угол наклона
подвижного хзснования 2 при одном импульсе движения руки регулировщика, чувствительность руки принята 3° для стандартной ручки отвертки или торцового гаечного ключа).
Предлагаемое устройство является прецизионным и обеспечивает, юстировку по двум взаимно перпендикулярным направлениям в небольшом диапазоне углов в зависимости о.т принятых размеров входящих элементов.
Фор. му ла изобретения
I. Юстировочное устройство, содер- жащее два основания, связанные между собой с помощью упругого элемента, причем одно основание выполнено с посадочным местом под юстируемый объект и установлено с возможностью перемещения относительно другого основания, а также регулировочный механизм, отличающееся тем, что, с целью повьш1ения точности юстировки и удобства эксплуатации, оба
713
основания и упругий элемент выполнены единым блоком в виде полужесткой муфты с прямоугольными гофрами, регулировочный механизм содержит, по крайней мере, три шпильки с реэьбо- .выми концами с резьбой противоположного направления, сочлененными этими концами с обоими основаниями с помощью резьбовых втулок, при этом каждая резьбовая втулка, установленная на основании, имеющем возможность перемещения, снабжена стопорной пластиной, а каждая резьбовая втулка, установленная на другом основании, снабжена кронштейном, выполне йным с
189678
ней за одно целое, в котором размещен регулировочный элемент, выполненный в виде эксцентриковой цапфы со сферической головкой, снабженный 5 фиксаторами осевого и радиального положения и сочлененный со шпилькой с помощью вильчатого рычага, закрепленного на ней.
2. Устройство по п.1, о т л и - чающееся тем, что, с целью увеличения диапазона юстировки, шпильки снабжены торсионными шейками и выполнены из сплава, обладающего сверхупругими свойствами.
.€Х.
дидА
12
(Риг.г
5- Б
В поВернито
Ю
19
21
ФигМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Юстировочный модуль | 1991 |
|
SU1793409A1 |
| Юстировочное устройство | 1983 |
|
SU1142806A1 |
| Юстировочное устройство | 1989 |
|
SU1700515A1 |
| Устройство для выставки преимущественно акселерометров | 1982 |
|
SU1064206A1 |
| Юстировочное устройство | 1989 |
|
SU1622869A1 |
| Устройство для юстировки оптических элементов | 1984 |
|
SU1167564A1 |
| Юстировочное устройство | 1989 |
|
SU1707588A1 |
| Юстировочное устройство | 1987 |
|
SU1492340A1 |
| Устройство для юстировки приборов | 1988 |
|
SU1783504A1 |
| Юстировочное устройство | 1986 |
|
SU1363111A1 |
Изобретение может быть использовано .в контрольно-испытательной аппаратуре, где требуется точная выставка зеркал по двум сопряженным направлениям при ограниченном подходе к регулировочным элементам. Цель изобретения - повышение точности юстировки и удобства эксплуатации уст;; (Л 00 СХ5 ср Од 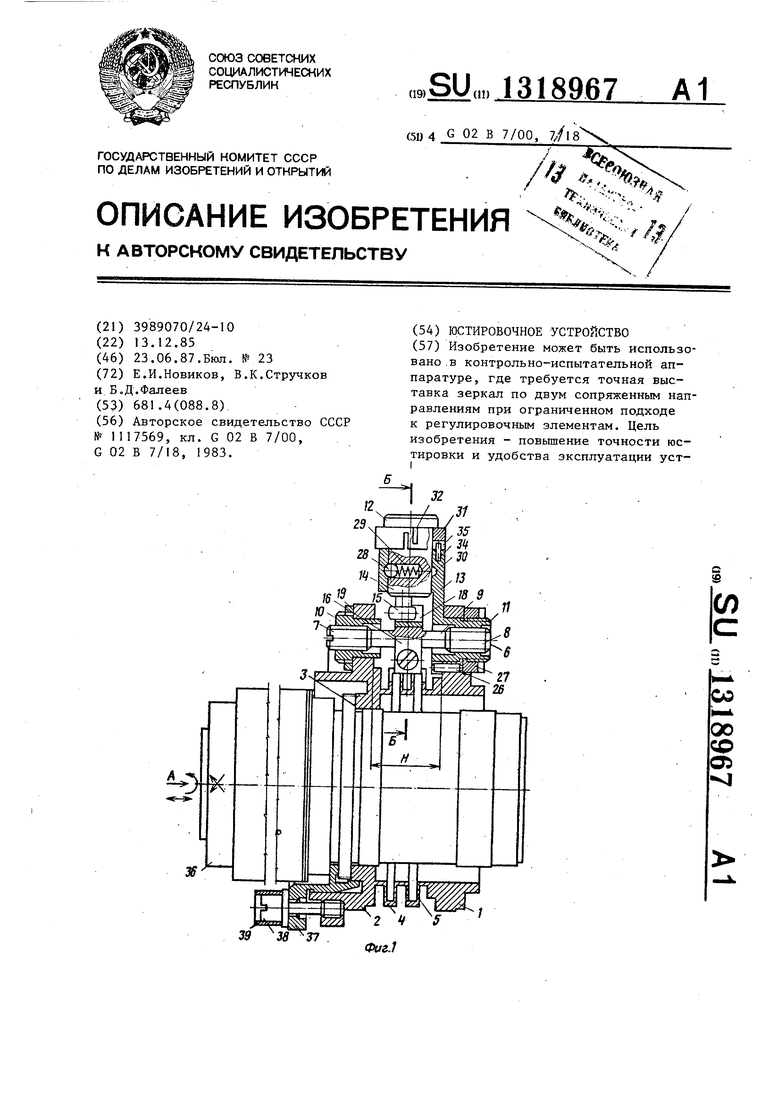
31
Редактор В.Данко
Фиг.5
Составитель Т.Гатилина
Техред М.Ходанич Корректор А.Зимокосов
Заказ 2508/40 Тираж 521Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Юстировочное устройство | 1983 |
|
SU1117569A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| X да | |||
