Изобретение относится к сельскому хозяйству, в частности для удаления навоза из последовательно расположенных птичников.
Известно устройство для удаления навоза из последовательно расположенных птичников, содержащее меха- низм для сгребания навоза с размещенных в птичниках настилов и механизм удаления его на транспортер.
Недостатком данного устройства является низкая производительность.
Цель изобретения - повышение удобства в эксплуатации.
Поставленная цель достигается тем, что навозоприемная емкость снабжена наклонными Г-образными опорными рычпгами с роликами на их верхних концах, а держатель выполнен в виде гибкой подвески, причем меха- низм выгрузки навоза выполнен в виде расположенной по уровню выше наво зоприемной емкости тележки с жестко закрепленными на ней снизу кронштейнами с дугообразными копирами, установленными с возможностью взаимодействия с роликами и опорными рычагами и стержневыми датчиками уровня поверхности навоза в навозосбор- нике, причем устройство снабжено концевыми выключателями привода транспортера, которые последовательно установлены вдоль последнего в местах загрузки емкости навозом.
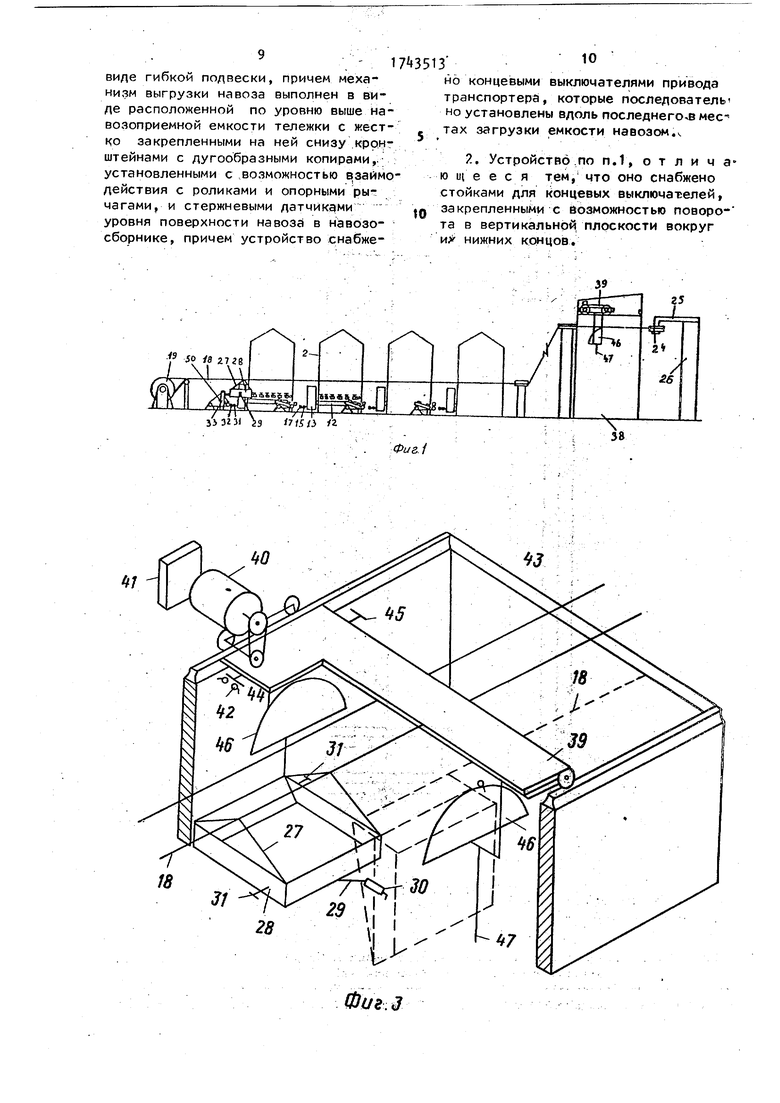
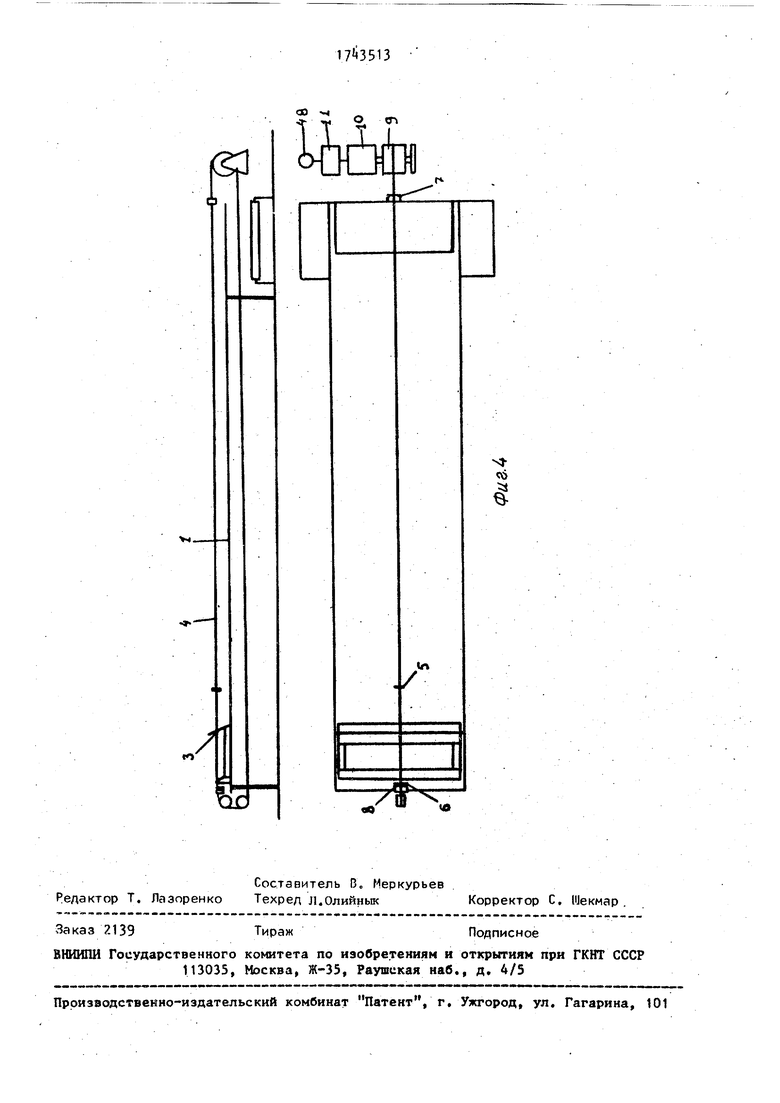
На фиг. 1 -Ц схематично изображено устройство для удаления навоза из последовательно расположенных птичников в трех проекциях и скребковый механизм для удаления навоза с настила .
Устройство для удаления навоза
из последовательно расположенных птичников содержит настил 1, размещенный в птичнике 2, скребок 3 с тросом 4, снабженным упорами 5 и 6, взаимодействующими с концевыми выключателями 7 и 8 и соединенными с лебедкой 9, имеющей электродвигатель 10 с системой управления электродвигателем 11, поперечный 12 и продольный 13 транспортеры с электродвигателями 1 и 15 с системами управления электродвигателями 16 и 17, трос 18, закрепленный на лебедке 19 с электродвигателем 20 с системой управления электродвигателем 1 с реле 27. времени и программным устройством 23, и шкив 2k, смонтированный посредством кронштейнов 25 на опоре 26.
На тросе 18 укреплена посредством гибкой подвески 27 навозоприемная
емкость 28, снабженная наклонными Г-образными опорными рычагами 29 с роликами 30 на их верхних концах и упорами 31, взаимодействующими с конечными выключателями 32, закрепленными на шарнирной стойке 33 с тросом f соединенным с лебедкой 35, имеющей электродвигатель 36 с системой управления электродвигателем 37, подключенной к системам управления электродвигателями 11, 16, 17 и 21.
Между лебедкой 19 и шкивом 2k установлен навозосборник 38 с меха- низмом выгрузки навоза, выполненным в виде расположенной по уровню выше навозоприемной емкости 8 тележки 39 с электродвигателем АО, систе мой управления электродвигателем
41 , подключенной к конечным выключателям 42 и 43, взаимодействующим с упорами 44 и 45, размещенными на раме Тележки 39, снабженной жестко закрепленными на ней кронштейнами с дугообразными копирами 46, установленными с возможностью взаимодействия с роликами 30 и опорными рычагами 29 и стержневыми датчиками 47 уровня поверхности навоза в навозо- сборнике 38.
В систему управления электродвигателями 11, размещенную на шестом настиле, включены реле 48 и 49 времени. Шарнирная стойка 33 снабжена упорами 50 и 51, взаимодействующими с конечными выключателями 52 и 53, подключенными в систему управления электродвигателем 37,
Птичники расположены последовательно и конечные выключатели 32, закрепленные на шарнирных стойках 33, установлены перед каждым птичником 2 по ходу навозоприемной емкости 2Р с правой и левой ветви троса 18.
Устройство для удаления навоза из последовательно расположенных птичников работает следующим образом.
В заданное время реле 22 времени замыкает цепь питания системы управления электродвигателем 21 и электродвигатель 20 передает вращение лебедке 19 и происходит перемещение троса 18 с навозоприемной емкостью 28. Одновременно с этим программное устройство 23 замыкает цепь системы управления электродвигателе 37 и включает электродвигатель 36, передающий вращение лебедке 35, которая посредством троса 34 поднимае шарнирную стойку 33, размещенную у первого птичника 2.
При подходе навозоприемной емкости 28 по правой или левой ветви троса 18 к шарнирной стойке 33 упором 31 размыкается пара нормально закрытых контактов конечного выключателя 32, соответственно обесточивается цепь системы управления элекродвигателем 21 и электродвигатель 20 с лебедкой 19 останавливается и замыкается вторая пара нормально открытых контактов конечного выключателя 32 и питание подается в системы управления электродвигателями 11, 16 и 17 и электродвигатели 10, 1-4 и 15 приводят в движение лебедку
с
10
15
20
25
743513
9, соединенную тросом 4 со скребком 3, установленным на первом настиле 1, поперечный 12 и продольный 13 транс- . портеры.
При вращении лебедки 9 подтягивается трос 4 и скребок, соединенный с ним, сбрасывает навоз с настила 2 на поперечный транспортер 12, с которого навоз сбрасывается на продольный транспортер 13 и далее навоз транспортируется в навозоприем- ную емкость 28.
При подходе скребка 3 в правое крайнее положение и сбросе навоза с настила 1 на поперечный транспортер 12 упором 5 размыкается пара нормально закрытых контактов конечного выключателя 7 и включается вторая его пара нормально открытых контактов и система управления электродвигателем 11 переключает электродвигатель 10 на обратный ход и лебедка 9 подтягивает скребок 3 в исходное положение.
При подходе скребка 3 в левое крайнее положение упором 6 размыкаются контакты конечного выключателя 8 и система управления электродвигателем 11 выключает электродвигатель 10. При замыкании второй пары нормально открытых контактов конечного выключателя 7 питание подается в систему управления электродвигателем 11 и включается электродвигатель 10 и лебедка 9 подтягивает тросом 4 скребок 3, установленный на втором ностиле 1. Процесс этот продолжается до тех пор, пока не будет удален навоз с шести настилов.
После удаления навоза с шестого настила 1 упором 5 размыкается пара нормально закрытых контактов и замыкается вторая пара нормально открытых контактов конечного выключателя 7, система управления электродвигателем 11 переключает злектродвига- тель 11 на обратный ход, лебедка 9 подтягивает скребок 3 в исходное положение, упором 6 размыкается пара нормально закрытых контактов конечного выключателя 8 система управления электродвигателем 11 выключает электродвигатель 10, останавливая лебедку 9,и включает реле 48 времени, которое в заданное время подает сиг- | нал в системы управления электродвигателями 16, 17, 21 и 37 на отключение электродвигателей 14 и 15 и
30
35
40
4S
SO
55
остановку поперечного 12 и продольного 13 транспортеров и включение электродвигателей 7.0 и 36 и программного устройства 23.
При включенном электродвигателе 36 лебедка 35 подтягивает трос 3 и подводит шарнирную стойку 33 с упором 50 до конечного выключателя 52, размыкая его контакты, обесточивая систему управления электродвигателем 37, останавливая электродвигатель 36 и лебедку 35.
При включенном электродвигателе 20 лебедка перемещает трос 18 с закрепленной на нем навозоприемной емкостью 28 и перемещает ее к месту выгрузки навоза. При проходе навозоприемной емкости 2В под тележкой 39 Г-образный опорный рычаг 29 с роликом 30 прокатывается по дугообразному копиру 46, соответственно наво- зоприемная емкость 28 наклоняется и навоз , находящийся в ней, сбрасывается в навозоприемник 38.
При включенном программном устройстве 23 оно в заданное время замыкает цепь системы управления электродвигателем 27 и включает электродвигатель 36 и лебедка 35, подтягивая трос 34, поднимает шарнирную стойку 33, размещенную у второго птичника. При подъеме шарнирной стойки. 33 в вертикальное положение упором 51 размыкаются контакты конечного выключателя 53 и система управления электродвигателем 37 выключает электродвигатель 36, останавливая лебедку 35.
При подходе1 навозоприемной емкости 28 к шарнирной стойке 33 упором 31 размыкается пара нормально закрытых контактов конечного выключателя 32 , цепь управления электродвигателем 21 обесточивается t электродвигатель 20 с лебедкой 19 останавливаются, размыкаются контакты программного устройства 23} замыкается вторая пара нормально открытых контактов конечного выключателя 32, питание подается в системы управления электродвигателями 11, 16 и 17 и электродвигатели 1П, 14 и 15 приводят в движение лебедку 9, соединенную с тросом 4 со скребком, установленную на первом настиле 1, поперечный 12 и продольный 13 транспортеры, расположенные во втором птичнике 2. Далее процесс удаления навоза из второго птичника 2 происходит анало17
5
0
5
0
5
0
5
0
5
8
гично, как при удалении навоза из первого птичника 2 и ведется до тех пор, пока из всех птичников 2 не будет удален навоз.
Удаляемый из птичников 2 навоз складируется в навозосборнике 38. При достижении кучи навоза под тележ кой 39 заданной высоты стержневой датчик 47 уровня навоза соприкасается с влажным навозом и замыкает цепь системы управления электродвигателем 41, включает электродвигатель 40 и передвигает тележку 39 на другую позицию. В заданное время реле 49 времени размыкает цепь системы управления электродвигателем 41 и электродвигатель 40 выключается. Смена позиций тележки 39 продолжается до тех пор, пока упор 45 не разомкнет контакты конечного выключателя 43. При заполнении навозо- приемника навозом его экскаватором грузят на транспортные средства и увозят на поля. После опорожнения навозосборника 38 вручную замыкают цепь питания системы управления электродвигателем 41, включается электродвигатель 40 и тележка 39 переезжает в исходное положение. Выключение электродвигателя 40 происходит при размыкании контактов конечного выключателя 42 упором 44.
Далее процесс складирования навоза в навозосборнике повторяется как показано выше.
При использовании предлагаемого устройства повышается производительность труда, улучшаются санитарно-гигиенические условия на территории птичников.(
Формула изобретения
1. Устройство для удаления навоза из последовательно расположенных птичников, содержащее -механизм для сгребания навоза с размещенных в птичниках настилов и механизм удаления его на транспортер, выполненный в виде гибкого замкнутого тягового элемента с держателем навозоприемной емкости, и механизм выгрузки навоза из последней в навозосборник, о т- личающееся тем, что, с целью повышения удобства в эксплуатации, навозоприемная емкость снабч жена наклонными Г-образными опорными рычагами с роликами на их верхних концах, а держатель выполнен в
виде гибкой подвески, причем механизм выгрузки навоза выполнен в виде расположенной по уровню выше на- возоприемной емкости тележки с жестко закрепленными на ней снизу кронштейнами с дугообразными копирами, установленными с возможностью займо действия с роликами и опорными рычагами, и стержневыми датчиками уровня поверхности навоза в навозо- сборнике, причем устройство снабже
«0
10
но концевыми выключателями привода транспортера, которые последователь но установлены вдоль последнего мес-1 тах загрузки емкости навозом.
2. Устройство по п.1, отличают е е с я тем, что оно снабжено стойками для концевых выключателей, закрепленными с возможностью поаоро- та в вертикальной плоскости вокруг их нижних концов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фильтрации жидкого навоза | 1990 |
|
SU1748694A1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ ОРГАНИЧЕСКИХ УДОБРЕНИЙ | 1998 |
|
RU2137736C1 |
| ПЕСКОЛОВКА | 1994 |
|
RU2093645C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОГО НАВОЗА | 1994 |
|
RU2085065C1 |
| УСТРОЙСТВО ДЛЯ СУШКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ | 1999 |
|
RU2163752C1 |
| БИОЛОГИЧЕСКИЙ ОКСИДАЦИОННЫЙ КОНТАКТНЫЙ СТАБИЛИЗАЦИОННЫЙ ПРУД | 1994 |
|
RU2083507C1 |
| УСТАНОВКА ДЛЯ УБОРКИ НАВОЗА ИЗ-ПОД РЕШЕТЧАТЫХ ПОЛОВ В СВИНАРНИКАХ | 1993 |
|
RU2042322C1 |
| УСТРОЙСТВО ДЛЯ ФИЛЬТРАЦИИ ЖИДКОГО НАВОЗА | 1994 |
|
RU2100920C1 |
| БИОЛОГИЧЕСКИЙ ОКСИДАЦИОННЫЙ КОНТАКТНЫЙ СТАБИЛИЗАЦИОННЫЙ ПРУД | 2000 |
|
RU2193530C2 |
| Животноводческая ферма | 1986 |
|
SU1311675A1 |
Изобретение относится к сельскому хозяйству и может быть использовано для уборки навоза в птичниках. Цель изобретения - повышение удобства эксплуатации устройства для уда
3J 32 31
28
Z5
Фиг.З
оо
и
Составитель В. Меркурьев Релактор Т. Лазоренко Техред л.Олийнык Корректор С. Шекмар.
Заказ 7.139
Тираж
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
О Л
и
1
«о
I
«в
Подписное
| Кива | |||
| и др | |||
| Машины и оборуп дование для птицеводства | |||
| М.: Агро- промиздат, 1987, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
